比例导引图解推导
《比例》正比例和反比例PPT课件 (共13张PPT)

填数游戏
在下面的括号中你能填什么 数?你能发现什么? 1 1 = 2 ︰()=() ︰ 2
例2:把下面四个比例两个内项和两个 外项相乘,你发现了什么?
2 ︰3=4 ︰6
6 ︰ 8=15 ︰20
1.2 ︰0.9=0.8 ︰0.6
1 2 3 4 ︰ = ︰ 4 2 3 9
比例的基本性质
在一个比例中,两个外项的积 等于两个内项的积,叫做比例的基 本性质。
议一议:
3 2
=
9 6
1.8
=
0.6
1.50.5综合练习1.猜猜我是谁。5 ︰ 4=10 ︰? 1 2 ︰ 5 5
=?︰
3
8
拓展练习
用下面的数能组成比例吗? 3 5 6 10
1、再长的路一步一步得走也能走到终点,再近的距离不迈开第一步永远也不会到达。 2、从善如登,从恶如崩。 3、现在决定未来,知识改变命运。 4、当你能梦的时候就不要放弃梦。 5、龙吟八洲行壮志,凤舞九天挥鸿图。 6、天下大事,必作于细;天下难事,必作于易。 7、当你把高尔夫球打不进时,球洞只是陷阱;打进时,它就是成功。 8、真正的爱,应该超越生命的长度、心灵的宽度、灵魂的深度。 9、永远不要逃避问题,因为时间不会给弱者任何回报。 10、评价一个人对你的好坏,有钱的看他愿不愿对你花时间,没钱的愿不愿意为你花钱。 11、明天是世上增值最快的一块土地,因它充满了希望。 12、得意时应善待他人,因为你失意时会需要他们。 13、人生最大的错误是不断担心会犯错。 14、忍别人所不能忍的痛,吃别人所不能吃的苦,是为了收获别人得不到的收获。 15、不管怎样,仍要坚持,没有梦想,永远到不了远方。 16、心态决定命运,自信走向成功。 17、第一个青春是上帝给的;第二个的青春是靠自己努力的。 18、励志照亮人生,创业改变命运。 19、就算生活让你再蛋疼,也要笑着学会忍。 20、当你能飞的时候就不要放弃飞。 21、所有欺骗中,自欺是最为严重的。 22、糊涂一点就会快乐一点。有的人有的事,想得太多会疼,想不通会头疼,想通了会心痛。 23、天行健君子以自强不息;地势坤君子以厚德载物。 24、态度决定高度,思路决定出路,细节关乎命运。 25、世上最累人的事,莫过於虚伪的过日子。 26、事不三思终有悔,人能百忍自无忧。 27、智者,一切求自己;愚者,一切求他人。 28、有时候,生活不免走向低谷,才能迎接你的下一个高点。 29、乐观本身就是一种成功。乌云后面依然是灿烂的晴天。 30、经验是由痛苦中粹取出来的。 31、绳锯木断,水滴石穿。 32、肯承认错误则错已改了一半。 33、快乐不是因为拥有的多而是计较的少。 34、好方法事半功倍,好习惯受益终身。 35、生命可以不轰轰烈烈,但应掷地有声。 36、每临大事,心必静心,静则神明,豁然冰释。 37、别人认识你是你的面容和躯体,人们定义你是你的头脑和心灵。 38、当一个人真正觉悟的一刻,他放弃追寻外在世界的财富,而开始追寻他内心世界的真正财富。 39、人的价值,在遭受诱惑的一瞬间被决定。 40、事虽微,不为不成;道虽迩,不行不至。 41、好好扮演自己的角色,做自己该做的事。 42、自信人生二百年,会当水击三千里。 43、要纠正别人之前,先反省自己有没有犯错。 44、仁慈是一种聋子能听到、哑巴能了解的语言。 45、不可能!只存在于蠢人的字典里。 46、在浩瀚的宇宙里,每天都只是一瞬,活在今天,忘掉昨天。 47、小事成就大事,细节成就完美。 48、凡真心尝试助人者,没有不帮到自己的。 49、人往往会这样,顺风顺水,人的智力就会下降一些;如果突遇挫折,智力就会应激增长。 50、想像力比知识更重要。不是无知,而是对无知的无知,才是知的死亡。 51、对于最有能力的领航人风浪总是格外的汹涌。 52、思想如钻子,必须集中在一点钻下去才有力量。 53、年少时,梦想在心中激扬迸进,势不可挡,只是我们还没学会去战斗。经过一番努力,我们终于学会了战斗,却已没有了拼搏的勇气。因此,我们转向自身,攻击自己,成为自己最大的敌人。 54、最伟大的思想和行动往往需要最微不足道的开始。 55、不积小流无以成江海,不积跬步无以至千里。 56、远大抱负始于高中,辉煌人生起于今日。 57、理想的路总是为有信心的人预备着。 58、抱最大的希望,为最大的努力,做最坏的打算。 59、世上除了生死,都是小事。从今天开始,每天微笑吧。 60、一勤天下无难事,一懒天下皆难事。 61、在清醒中孤独,总好过于在喧嚣人群中寂寞。 62、心里的感觉总会是这样,你越期待的会越行越远,你越在乎的对你的伤害越大。 63、彩虹风雨后,成功细节中。 64、有些事你是绕不过去的,你现在逃避,你以后就会话十倍的精力去面对。 65、只要有信心,就能在信念中行走。 66、每天告诉自己一次,我真的很不错。 67、心中有理想 再累也快乐 68、发光并非太阳的专利,你也可以发光。 69、任何山都可以移动,只要把沙土一卡车一卡车运走即可。 70、当你的希望一个个落空,你也要坚定,要沉着! 71、生命太过短暂,今天放弃了明天不一定能得到。 72、只要路是对的,就不怕路远。 73、如果一个人爱你、特别在乎你,有一个表现是他还是有点怕你。 74、先知三日,富贵十年。付诸行动,你就会得到力量。 75、爱的力量大到可以使人忘记一切,却又小到连一粒嫉妒的沙石也不能容纳。 76、好习惯成就一生,坏习惯毁人前程。 77、年轻就是这样,有错过有遗憾,最后才会学着珍惜。 78、时间不会停下来等你,我们现在过的每一天,都是余生中最年轻的一天。 79、在极度失望时,上天总会给你一点希望;在你感到痛苦时,又会让你偶遇一些温暖。在这忽冷忽热中,我们学会了看护自己,学会了坚强。 80、乐观者在灾祸中看到机会;悲观者在机会中看到灾祸。
正比例和反比例ppt

应用场景的对比
正比例
在路程一定的情况下,速度和时间成正比;在速度一定的情况下,路程和时间成 正比。
反比例
在压强一定的情况下,压力和受力面积成反比;在液体密度一定的情况下,浮力 和排水体积成反比。
04
CHAPTER
正比例和反比例的实例
正比例实例:速度与时间的关系
总结词
速度与时间成正比,即当速度增加时, 时间也会相应增加。
正比例的性质
总结词
正比例具有对称性、传递性和结合性。
详细描述
正比例关系具有一些基本的数学性质。首先,如果x和y成正比例,那么y和x也成正比例,这体现了对称性。其次, 如果x和y、y和z分别成正比例,那么x和z也成正比例,这体现了传递性。最后,如果x和y、y和z分别成正比例, 那么x和z以及z和x都成正比例,这体现了结合性。
正比例和反比例在生活中的 应用
正比例在生活中的应用:购物折扣
总结词
购物折扣是正比例关系的一个常见例子,商品的原价与 折扣比例成正比,折扣比例越高,商品价格越低。
详细描述
在购物时,商家经常会提供折扣来吸引消费者。这种折 扣与商品的原价成正比关系,即折扣比例越高,商品价 格就越低。例如,如果一个商品原价为100元,打8折后 只需支付80元,折扣比例越高,最终支付的金额就越少 。
正反比例在生活中的应用对比
总结词
汽车油箱大小与油耗量之间存在反比例关系 ,油箱越大,单位油耗行驶的里程越长;油 箱越小,单位油耗行驶的里程越短。
详细描述
汽车油箱大小与油耗量之间存在反比例关系 。一般来说,油箱越大,车辆可以行驶的里 程就越长;油箱越小,车辆可以行驶的里程 就越短。这是因为油箱越大,车辆在行驶相 同距离时所需的油耗量就越少;而油箱越小 ,则所需的油耗量就越多。这种反比例关系 使得大油箱的汽车在长途行驶时更具优势。
小学数学-思维导图-第五章-比和比例-正比例和反比例比例
小学数学思维导图第五章比和比例正比例和反比例比例正比例和反比例是数学中两个重要的概念,它们可以帮助我们理解和解决许多实际问题。
在这一章节中,我们将通过思维导图的方式,深入探讨正比例和反比例的概念、性质以及它们在实际中的应用。
一、正比例1. 定义:如果两个相关联的量,它们的比值(商)始终保持不变,那么它们就是成正比例的关系。
用数学公式表示,即 y = kx,其中 k 是常数,表示比例关系。
2. 性质:a. 当一个量增大时,另一个量也会相应地增大。
b. 当一个量减小时,另一个量也会相应地减小。
c. 两个量的比值始终保持不变。
3. 应用:a. 计算速度:速度 = 路程÷ 时间。
当路程固定时,速度和时间成正比。
b. 计算工资:工资 = 工作量× 单价。
当单价固定时,工资和工作量成正比。
二、反比例1. 定义:如果两个相关联的量,它们的乘积始终保持不变,那么它们就是成反比例的关系。
用数学公式表示,即 xy = k,其中 k 是常数,表示比例关系。
2. 性质:a. 当一个量增大时,另一个量会相应地减小。
b. 当一个量减小时,另一个量会相应地增大。
c. 两个量的乘积始终保持不变。
3. 应用:a. 计算速度:速度 = 路程÷ 时间。
当路程固定时,速度和时间成反比。
b. 计算工资:工资 = 工作量× 单价。
当工作量固定时,工资和单价成反比。
小学数学思维导图第五章比和比例正比例和反比例比例三、比例关系的识别1. 正比例关系的识别:观察两个量的变化趋势,如果它们同时增加或减少,且它们的比值保持不变,那么可以判断它们成正比例关系。
例如,在绘制图表时,如果数据点在一条通过原点的直线上,那么这些数据点就表示正比例关系。
2. 反比例关系的识别:同样地,观察两个量的变化趋势,如果它们一个增加而另一个减少,且它们的乘积保持不变,那么可以判断它们成反比例关系。
例如,在绘制图表时,如果数据点在一条双曲线上,那么这些数据点就表示反比例关系。
比例导引图解推导
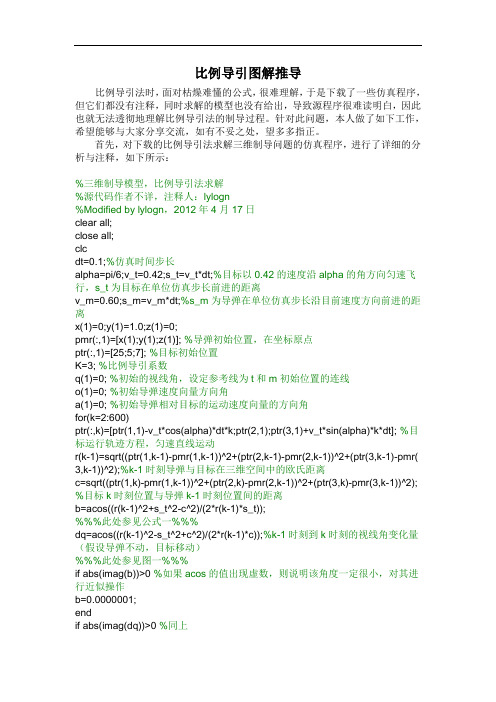
比例导引图解推导比例导引法时,面对枯燥难懂的公式,很难理解,于是下载了一些仿真程序,但它们都没有注释,同时求解的模型也没有给出,导致源程序很难读明白,因此也就无法透彻地理解比例导引法的制导过程。
针对此问题,本人做了如下工作,希望能够与大家分享交流,如有不妥之处,望多多指正。
首先,对下载的比例导引法求解三维制导问题的仿真程序,进行了详细的分析与注释,如下所示:%三维制导模型,比例导引法求解%源代码作者不详,注释人:lylogn%Modified by lylogn,2012年4月17日clear all;close all;clcdt=0.1;%仿真时间步长alpha=pi/6;v_t=0.42;s_t=v_t*dt;%目标以0.42的速度沿alpha的角方向匀速飞行,s_t为目标在单位仿真步长前进的距离v_m=0.60;s_m=v_m*dt;%s_m为导弹在单位仿真步长沿目前速度方向前进的距离x(1)=0;y(1)=1.0;z(1)=0;pmr(:,1)=[x(1);y(1);z(1)]; %导弹初始位置,在坐标原点ptr(:,1)=[25;5;7]; %目标初始位置K=3; %比例导引系数q(1)=0; %初始的视线角,设定参考线为t和m初始位置的连线o(1)=0; %初始导弹速度向量方向角a(1)=0; %初始导弹相对目标的运动速度向量的方向角for(k=2:600)ptr(:,k)=[ptr(1,1)-v_t*cos(alpha)*dt*k;ptr(2,1);ptr(3,1)+v_t*sin(alpha)*k*dt]; %目标运行轨迹方程,匀速直线运动r(k-1)=sqrt((ptr(1,k-1)-pmr(1,k-1))^2+(ptr(2,k-1)-pmr(2,k-1))^2+(ptr(3,k-1)-pmr( 3,k-1))^2);%k-1时刻导弹与目标在三维空间中的欧氏距离c=sqrt((ptr(1,k)-pmr(1,k-1))^2+(ptr(2,k)-pmr(2,k-1))^2+(ptr(3,k)-pmr(3,k-1))^2); %目标k时刻位置与导弹k-1时刻位置间的距离b=acos((r(k-1)^2+s_t^2-c^2)/(2*r(k-1)*s_t));%%%此处参见公式一%%%dq=acos((r(k-1)^2-s_t^2+c^2)/(2*r(k-1)*c));%k-1时刻到k时刻的视线角变化量(假设导弹不动,目标移动)%%%此处参见图一%%%if abs(imag(b))>0 %如果acos的值出现虚数,则说明该角度一定很小,对其进行近似操作b=0.0000001;endif abs(imag(dq))>0 %同上dq=0.0000001;endq(k)=q(k-1)+dq; %更新视线角o(k)=o(k-1)+K*dq; %更新导弹速度向量方向角a(k)=o(k)-q(k); %更新导弹相对目标的运动速度向量的方向角c1=r(k-1)*sin(b)/sin(a(k)+b); %计算k-1时刻角b所对边的长度%%%此处参见公式二%%%c2=r(k-1)*sin(a(k))/sin(a(k)+b); %计算k-1时刻角a(k)所对边的长度c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹不动,目标移动的假设条件下),为假值dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为假值%%%此处参见图二%%%if abs(imag(dq))>0dq=0.0000001;endq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%�ded by lylogn 2012.04.17,To make 'dq' get closer to its true valueq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;endq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%q(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离,终于近似为真值了x1(k)=ptr(1,k-1)+c2/s_t*(ptr(1,k)-ptr(1,k-1));y1(k)=ptr(2,k-1)+c2/s_t*(ptr(2,k)-ptr(2,k-1));z1(k)=ptr(3,k-1)+c2/s_t*(ptr(3,k)-ptr(3,k-1)); %计算出角b所对边与目标运动轨迹的交点:(x1,y1,z1)%%%参见公式三%%%x(k)=pmr(1,k-1)+s_m/c1*(x1(k)-pmr(1,k-1));y(k)=pmr(2,k-1)+s_m/c1*(y1(k)-pmr(2,k-1));z(k)=pmr(3,k-1)+s_m/c1*(z1(k)-pmr(3,k-1)); %计算出导弹k时刻所运动到的位置:(x,y,z)%%%参见公式三%%%pmr(:,k)=[x(k);y(k);z(k)];r(k)=sqrt((ptr(1,k)-pmr(1,k))^2+(ptr(2,k)-pmr(2,k))^2+(ptr(3,k)-pmr(3,k))^2);if r(k)<0.06;break;end;endsprintf('遭遇时间:%3.1f',0.1*k);figure(1);plot3(pmr(1,1:k),pmr(2,1:k),pmr(3,1:k),'k',ptr(1,:),ptr(2,:),ptr(3,:));axis([0 25 0 5 0 25]);text(x(180),y(180),z(180),'\rightarrow 比例导引律制导下的导弹运动轨迹'); text(ptr(1,280),ptr(2,280),ptr(3,280),'\rightarrow 目标运动轨迹');grid on之后,鉴于程序中很多地方不结合模型图也很难理解,将其中关键的图例与公式提取如下:最后,程序的运行过程分析完成,具体的细节详见注释,运行结果如下图所示:综上所述,本工作对比例导引法求解三维制导问题的仿真程序进行了详细的分析与注释,程序运行正常,希望对大家理解比例导引法有所帮助。
《解比例》课件PPT

一 什么叫做比例? 表示两个比相等的式子叫做比例.
如,2∶5= 4∶10, 二 比例的基本性质是什么? 在比例里,两个外项的积等于两个 内项的积.
三 应用比例的基本性质,判断下面哪组中 的两个比可以组成比例. 6∶10 和 9∶15 (√ )
20∶5 和 4∶1
15∶)
)
解下列方程
X×2=72
X=72÷2
X=36
X×2=8×9
X=8×9÷2 X=36
四 根据比例的基本性质,在括号里填上 适当的数
2
(
4 = ) 10
根据比例的基本性质, 如果已知比例中的任何三 项,就可以求出另外一个 未知项。 求比例中的未知项,叫做 解比例。
埃菲尔铁塔高320米,
它不仅是一座吸引游 人观光的纪念塔,还 是巴黎这座具有悠久 历史的美丽城市的象 征。
法国巴黎的埃菲尔 铁塔高320米,北京 的“世界公园”里 有一座埃菲尔铁塔 的模型,它的高度与 原塔高度的比是 1:10.这座模型高多 少米?
解:设这座模型高X 米.
X : 320 = 1 : 10
10X = 320×1
320×1 X= 10
X =32
答:这座模型高 32米.
2.4 解比例: — = 1.5
解比例的方法:
一化(把“比”转化为“积”)
二 约(有约分先约分)
作业:
课本练习八第八题
6
—
X
解:2.4X=( 1.5 )×( 6 ) ( 1.5 )×(6 ) X=
( 2.4 )
X=( 3.75)
解比例:
2.4 X 解: 12 X=( 2.4 )×( 3 ) ( 2.4)×( 3 ) X= ( 12 ) X=( 0.6 )
比和比例思维导图

⽐和⽐例思维导图⽐⽐例⽐与⽐例正⽐例、反⽐例⽐例尺⽐的意义基本性质求⽐值和化简⽐⽐例尺分类图上距离应⽤⽐例尺画图的步骤图形的缩放常⻅的数量关系式⽐和⽐例的区别单价×数量=总价单产量×数量=总产量速度×时间=路程⼯效×⼯作时间=⼯作总量⽐表⽰两个量相除的关系,它有两项(即前、后项);⽐例表⽰两个⽐相等的式⼦,它有四项(即两个内项和两个外项)⽐有基本性质,它是化简⽐的依据;⽐例也有基本性质,它是解⽐例的依据求⽐值的⽅法⽤⽐的前项除以后项,它的结果是一个数值可以是整数,也可以是⼩数或分数根据⽐的基本性质可以把⽐化成最简单的整数⽐,它的结果必须是一个最简⽐,即前、后项是互质的数一幅图的图上距离和实际距离的⽐,叫做这幅图的⽐例尺⽐例尺是一个⽐,因此不能带有计量单位⽐例尺是图上距离⽐实际距离得到的最简整数⽐,可以写成带⽐号的形式,也可以写成分数形式在⼤⼩相同的地图上,⽐例尺越⼤,反映的实际范围越⼩保持图形原来的形状⽽使图形变⼩,叫做图形的缩⼩;保持图形原来的形状⽽使图形变⼤,叫做图形的放⼤图形放⼤或缩⼩后所得到的图形与原图形相⽐,形状相同,⼤⼩不同写出图的名称确定⽐例尺根据⽐例尺求出图上距离画图(画出单位⻓度)标出实际距离,写清地点名称标出⽐例尺图上距离÷实际距离=⽐例尺实际距离×⽐例尺=图上距离图上距离÷⽐例尺=实际距离数值⽐例尺和线段⽐例尺缩⼩⽐例尺和放⼤⽐例尺通常缩⼩⽐例尺的前项为1,放⼤⽐例尺的后项为1线段⽐例尺可以改写成数值⽐例尺改写⽅法:根据线段⽐例尺,写出图上距离和实际距离的⽐,统一单位后再化成最简⽐的形式⽐的前项和后项同时乘或者除以相同的数(0除外),⽐值不变两个数相除⼜叫做两个数的⽐“:”是⽐号,读作“⽐”。
⽐号前⾯的数叫做⽐的前项,⽐号后⾯的数叫做⽐的后项。
⽐的前项除以后项所得的商,叫做⽐值同除法⽐较,⽐的前项相当于被除数,后项相当于除数,⽐值相当于商⽐值通常⽤分数表⽰,也可以⽤⼩数表⽰,有时也可能是整数⽐的后项不能是零根据分数与除法的关系,可知⽐的前项相当于分⼦,后项相当于分⺟,⽐值相当于分数值成正⽐例的量成反⽐例的量判断两种量成正⽐例还是成反⽐例正反⽐的异同点相同点不同点看这两个相关联的量中相对就的两个数的商一定还是积一定,如果商一定,就成正⽐例;如果积一定,就成反⽐例正⽐例反⽐例两种相关联的量,一种量变化,另一种量也随着变化,如果这两种量中相对应的两个数的⽐值(也就是商)一定,这两种量就叫做成正⽐例的量,他们的关系叫做正⽐例关系。
让你轻松认识各种比例关系
让你轻松认识各种比例关系比例关系在我们的日常生活中无处不在,了解和掌握各种比例关系对我们的学习和生活都有着很大的帮助。
本文将为您介绍一些常见的比例关系,并提供一些简单易懂的例子,帮助您轻松理解和认识各种比例关系。
一、比例与比例的表示方法比例是两个相同类型的量之间的等比关系。
比例关系可以用等比例符号“:”表示,也可以用分数表示。
例如,中国和美国的人口比例为4:1,可以表示成4/1或4.0。
二、直接比例关系直接比例关系是指两个量成正比,即当一个量增大时,另一个量也相应地增大;当一个量减小时,另一个量也相应地减小。
直接比例关系可以用以下公式表示:y = kx其中,y和x表示两个量,k为比例常数。
举例来说,如果一辆汽车以每小时60公里的速度行驶,那么行驶时间与行驶距离之间就存在直接比例关系。
行驶时间与行驶距离之间的比例常数k为1/60或0.0167。
三、反比例关系反比例关系是指两个量成反比,即当一个量增大时,另一个量相应地减小;当一个量减小时,另一个量相应地增大。
反比例关系可以用以下公式表示:y = k/x其中,y和x表示两个量,k为比例常数。
例如,如果一个水桶被用来接水,水龙头的流量与接满水桶所需的时间之间存在反比例关系。
水龙头的流量与接满水桶所需的时间之间的比例常数k为1。
四、相似比例关系相似比例关系是指在两个或多个几何形状之间存在的比例关系。
在相似的图形中,其边长、面积或体积等各个部分之间的比例关系相同。
例如,两个三角形ABC和DEF是相似的,可以表示为ABC∼DEF。
在这种情况下,三角形ABC的边长与三角形DEF的边长之间的比例关系为AB/DE = BC/EF = AC/DF。
五、百分比关系百分比关系是指将一个数表示为另一个数的百分之几。
百分比关系可以用以下公式表示:百分比 = (部分/整体) × 100%例如,如果一个班级有30名男生和40名女生,那么男生所占的百分比为(30/70) × 100% = 42.9%,女生所占的百分比为(40/70) × 100% =57.1%。
正比例和反比例ppt课件

反比例的性质及证明
01 反比例的定义
当两个量的乘积恒定时,称这两个量成反比例。
02 反比例的性质
反比例的两个量具有相反的符号,当一个量增加 时,另一个量会相应减少,且它们的乘积恒定。
03 反比例的证明
可以通过绘制图表或使用代数方法证明两个量之 间的反比例关系。
正比例和反比例的练习题及
05
解析
正比例的练习题及解析
函数
正比例关系是函数关系中的一种,其中自变量和因变量之间的比例常数k称为正比例系数。通过 掌握正比例函数的性质和图像,我们可以更好地理解其他函数的关系和性质。
正比例和反比例在实际问题中的意义
资源分配
在资源分配过程中,正比例关系可以帮助我们更好地规划资 源的分配,确保各项任务能够按照比例完成。例如,在多个 部门协同工作时,通过调整各部门之间的任务分配比例,可 以更好地完成任务。
06
总结与回顾
正比例和反比例的重要性和应用价值
正比例和反比例是数学中重要的概念,对于理解 函数和变量之间的关系以及解实际问题具有重 要意义。
在实际生活中,正比例和反比例关系广泛存在, 如购物时的价格和数量、速度和时间等。掌握正 比例和反比例的概念和应用有助于解决日常生活 中的问题。
正比例和反比例的异同点及注意事项
02 正比例中,当一个量增加时,另一个量也增加; 而在反比例中,当一个量增加时,另一个量减少 。
02 正比例和反比例可以相互转化,比如时间和距离 的关系就是典型的正比例关系,但如果考虑速度 恒定的情况下,时间和距离就成反比例关系。
02
正比例和反比例的应用
在生产生活中的实际应用
生产计划
在生产过程中,企业需要制定生产计划,根据产品的需 求量和库存量来确定每日的生产量。正比例关系可以帮 助企业更好地规划生产,避免库存积压或缺货现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
比例导引图解推导比例导引法时,面对枯燥难懂的公式,很难理解,于是下载了一些仿真程序,但它们都没有注释,同时求解的模型也没有给出,导致源程序很难读明白,因此也就无法透彻地理解比例导引法的制导过程。
针对此问题,本人做了如下工作,希望能够与大家分享交流,如有不妥之处,望多多指正。
首先,对下载的比例导引法求解三维制导问题的仿真程序,进行了详细的分析与注释,如下所示:%三维制导模型,比例导引法求解%源代码作者不详,注释人:lylogn%Modified by lylogn,2012年4月17日clear all;close all;clcdt=0.1;%仿真时间步长alpha=pi/6;v_t=0.42;s_t=v_t*dt;%目标以0.42的速度沿alpha的角方向匀速飞行,s_t为目标在单位仿真步长前进的距离v_m=0.60;s_m=v_m*dt;%s_m为导弹在单位仿真步长沿目前速度方向前进的距离x(1)=0;y(1)=1.0;z(1)=0;pmr(:,1)=[x(1);y(1);z(1)]; %导弹初始位置,在坐标原点ptr(:,1)=[25;5;7]; %目标初始位置K=3; %比例导引系数q(1)=0; %初始的视线角,设定参考线为t和m初始位置的连线o(1)=0; %初始导弹速度向量方向角a(1)=0; %初始导弹相对目标的运动速度向量的方向角for(k=2:600)ptr(:,k)=[ptr(1,1)-v_t*cos(alpha)*dt*k;ptr(2,1);ptr(3,1)+v_t*sin(alpha)*k*dt]; %目标运行轨迹方程,匀速直线运动r(k-1)=sqrt((ptr(1,k-1)-pmr(1,k-1))^2+(ptr(2,k-1)-pmr(2,k-1))^2+(ptr(3,k-1)-pmr( 3,k-1))^2);%k-1时刻导弹与目标在三维空间中的欧氏距离c=sqrt((ptr(1,k)-pmr(1,k-1))^2+(ptr(2,k)-pmr(2,k-1))^2+(ptr(3,k)-pmr(3,k-1))^2); %目标k时刻位置与导弹k-1时刻位置间的距离b=acos((r(k-1)^2+s_t^2-c^2)/(2*r(k-1)*s_t));%%%此处参见公式一%%%dq=acos((r(k-1)^2-s_t^2+c^2)/(2*r(k-1)*c));%k-1时刻到k时刻的视线角变化量(假设导弹不动,目标移动)%%%此处参见图一%%%if abs(imag(b))>0 %如果acos的值出现虚数,则说明该角度一定很小,对其进行近似操作b=0.0000001;endif abs(imag(dq))>0 %同上dq=0.0000001;endq(k)=q(k-1)+dq; %更新视线角o(k)=o(k-1)+K*dq; %更新导弹速度向量方向角a(k)=o(k)-q(k); %更新导弹相对目标的运动速度向量的方向角c1=r(k-1)*sin(b)/sin(a(k)+b); %计算k-1时刻角b所对边的长度%%%此处参见公式二%%%c2=r(k-1)*sin(a(k))/sin(a(k)+b); %计算k-1时刻角a(k)所对边的长度c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹不动,目标移动的假设条件下),为假值dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为假值%%%此处参见图二%%%if abs(imag(dq))>0dq=0.0000001;endq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%�ded by lylogn 2012.04.17,To make 'dq' get closer to its true valueq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;endq(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离(在导弹移动,目标也移动的假设条件下),逼近真值,以下计算使之更加精确dq=a(k)-acos(((c1-s_m)^2+c3^2-(c2-s_t)^2)/(2*(c1-s_m)*c3)); %k-1时刻到k时刻的视线角变化量(假设导弹移动,目标也移动),以下代码重复以上过程,为真值if abs(imag(dq))>0dq=0.0000001;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%q(k)=q(k-1)+dq;o(k)=o(k-1)+K*dq;a(k)=o(k)-q(k);c1=r(k-1)*sin(b)/sin(a(k)+b);c2=r(k-1)*sin(a(k))/sin(a(k)+b);c3=sqrt((c1-s_m)^2+(c2-s_t)^2+2*(c1-s_m)*(c2-s_t)*cos(a(k)+b)); %计算k时刻导弹m与目标t之间的距离,终于近似为真值了x1(k)=ptr(1,k-1)+c2/s_t*(ptr(1,k)-ptr(1,k-1));y1(k)=ptr(2,k-1)+c2/s_t*(ptr(2,k)-ptr(2,k-1));z1(k)=ptr(3,k-1)+c2/s_t*(ptr(3,k)-ptr(3,k-1)); %计算出角b所对边与目标运动轨迹的交点:(x1,y1,z1)%%%参见公式三%%%x(k)=pmr(1,k-1)+s_m/c1*(x1(k)-pmr(1,k-1));y(k)=pmr(2,k-1)+s_m/c1*(y1(k)-pmr(2,k-1));z(k)=pmr(3,k-1)+s_m/c1*(z1(k)-pmr(3,k-1)); %计算出导弹k时刻所运动到的位置:(x,y,z)%%%参见公式三%%%pmr(:,k)=[x(k);y(k);z(k)];r(k)=sqrt((ptr(1,k)-pmr(1,k))^2+(ptr(2,k)-pmr(2,k))^2+(ptr(3,k)-pmr(3,k))^2);if r(k)<0.06;break;end;endsprintf('遭遇时间:%3.1f',0.1*k);figure(1);plot3(pmr(1,1:k),pmr(2,1:k),pmr(3,1:k),'k',ptr(1,:),ptr(2,:),ptr(3,:));axis([0 25 0 5 0 25]);text(x(180),y(180),z(180),'\rightarrow 比例导引律制导下的导弹运动轨迹'); text(ptr(1,280),ptr(2,280),ptr(3,280),'\rightarrow 目标运动轨迹');grid on之后,鉴于程序中很多地方不结合模型图也很难理解,将其中关键的图例与公式提取如下:最后,程序的运行过程分析完成,具体的细节详见注释,运行结果如下图所示:综上所述,本工作对比例导引法求解三维制导问题的仿真程序进行了详细的分析与注释,程序运行正常,希望对大家理解比例导引法有所帮助。