补偿目标机动和制导动力学的制导律
lqr制导律

LQR制导律1.引言制导律是导弹制导系统的核心,用于控制导弹的飞行轨迹,使其能够准确命中目标。
LQR制导律是一种基于线性二次型调节器的制导律,具有简单、稳定、易于实现等优点。
本文将介绍LQR制导律的基本原理、系统模型建立、设计线性二次调节器(LQR)以及LQR制导律的实现。
2.LQR概述LQR是一种基于状态反馈的线性二次型调节器,其目标是使系统的输出轨迹在某种性能指标下达到最优。
LQR具有简单、稳定、易于实现等优点,被广泛应用于控制系统设计和分析中。
3.LQR制导律基本原理LQR制导律的基本原理是将导弹的飞行轨迹表示为状态变量的函数,然后通过设计一个线性二次型调节器来控制导弹的飞行轨迹。
该调节器的作用是根据导弹的状态信息,计算出控制指令,使导弹的飞行轨迹达到最优。
4.系统模型建立在LQR制导律中,首先需要建立导弹系统的数学模型。
该模型通常由状态方程和输出方程组成,描述了导弹的运动状态以及与外界环境的相互作用。
在建立模型时,需要考虑导弹的飞行动力学、控制力、空气阻力等因素。
5.设计线性二次调节器(LQR)在设计线性二次型调节器时,需要选择合适的权重矩阵和反馈增益矩阵,以使系统的输出轨迹在某种性能指标下达到最优。
常用的性能指标包括均方误差、均方根误差等。
通过求解最优控制问题,可以得到权重矩阵和反馈增益矩阵的数值解。
6.LQR制导律实现在实现LQR制导律时,需要将导弹的状态信息实时输入到线性二次型调节器中,计算出控制指令并输出给导弹控制系统。
该指令用于控制导弹的舵面运动,进而控制导弹的飞行轨迹。
在实际应用中,需要将LQR制导律与导弹控制系统进行集成,并进行仿真和实验验证。
7.结论本文介绍了LQR制导律的基本原理、系统模型建立、设计线性二次调节器(LQR)以及LQR制导律的实现。
LQR制导律具有简单、稳定、易于实现等优点,被广泛应用于导弹制导系统中。
通过建立导弹系统的数学模型并设计合适的线性二次型调节器,可以实现导弹的精确制导和命中目标。
针对机动目标带攻击角约束的三维制导律

先验知识的制导参数 自适应调 整规 则。仿 真结果表 明 , 该三维制导律能垂直命 中机动 目标 , 并对 目标机动加速度 的变化具 有较强的鲁棒性和适应能力。
关 键 词 : 模 制 导 ; 维制 导 ; 动 目标 ; 击 角 滑 三 机 攻
中图分类号 :4 8 1 V 4 .5
文献标识码 : A
文章编 号 :0 629 ( 00 0 -2 70 10 -7 3 2 1 ) 3 3 -5 0
Th e - i e so a u da c a wih r e d m n i n lg i n e l w t
a t c n l o s r i tf r m a e v r b e t r e ta k a g e c n t a n o n u e a l a g t
固 体 火 箭 技 术 第3 3卷第 3期
J un lo oi o k t e h oo y o ra f l R c e c n lg S d T V0 3 No 32 O L3 . 01
针 对 机 动 目标 带 攻 击 角 约 束 的 三 维 制 导 律 ①
尹 永 鑫 杨 , 明 吴 , 鹏
YI Yo g.i , N n xn YANG n , U n Mi g W Pe g
( .C iaA ae yo e saeA rdn mc ,lvn e ea D s nD pr e tB in 10 7 , h a 1 hn cdm f r p c e ya i Eeet G nr ei eat n,e i A o o s h l g m jg 004C i ; n
A b t a t A h e - i n in l g da c a wi ta k a g ec nsr i twa e i e o ne v rbl a g t I r rt n s r c : t r e d me so a ui n el w t atc n l o ta n s d sg d frma u ea e tr e . n ode o u — h n
2制导规律汇总
二、飞行制导规律2.1综述:制导系统的任务是保证导弹击中目标,或者或者以最小的脱靶量截获之。
而导弹的飞行路线(弹道)是由制导规律决定的。
理论上讲有多条或者无数条弹道保证导弹和目标相遇,实际上对于每一种导弹只选取一条特定条件下的最佳弹道,所以导弹的弹道是受一定条件限制的。
有一定的规律,即制导规律(也称导引方法)。
从运动学的观点来看,制导规律可以决定导弹的理想弹道,所以选择导弹的导引规律就是选择导弹的理想弹道,即导弹在导引系统理想工作条件下所应经历的飞行轨迹。
理想弹道表示了制导规律的特性,不同的制导规律,弹道的曲率不同,系统动态误差不同,过载分部以及导弹、目标速度比的要求也不同。
制导武器的制导规律是借助一定的仪器实现的,根据制导方式的不同,这些仪器可在导弹上,也可在导弹以外的导引站上。
选择制导规律的根据是目标的运动特性、环境和设备的性能以及使用要求。
对导引规律一般有以下要求:(1)保证系统有足够的制导准确度。
(2)导弹的整个飞行弹道,特别是在攻击区域内,理想弹道曲率应该尽量小,保证所需的导弹过载小。
(3)保证飞行的稳定性,导弹的运动对目标运动参数的变化不敏感。
(4)制导设备尽可能简单。
导引方法和制导方式是相互关联的。
在自瞄准制导中常见的导引方法有:追踪法、平行接近法、比例导引法等。
在遥控知道中常见的导引方法有:3点法、前置角法等。
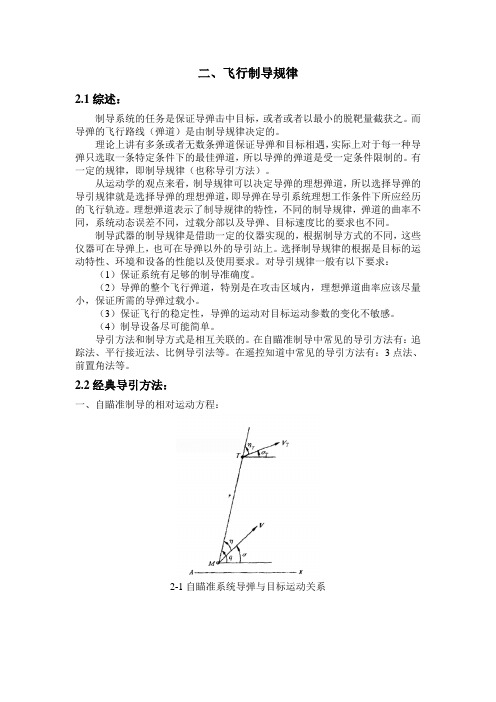
2.2经典导引方法:一、自瞄准制导的相对运动方程:2-1自瞄准系统导弹与目标运动关系根据图2-1所示的导弹和目标间的相对运动关系,显然:目标视线方向上: ηηc o s c o s V V dtdr T T -= 目标视线法线方向上: ()T T V V rdt dq ηηsin sin 1-= 结合图2—1中角度关系,以及导引关系方程,可得到自瞄准制导的相对运动方程组:sin sin cos cos 1=+=+=-=-=εησησηηηηTT T T T T q q V V dtdq r V V dtdr (1)式中,01=ε未描述导引方法的导引方程。
21873489

状态精 确可 知时 , 以得 到指 定 性 能 指标 下 的最优 可 制导律 。但 制导 实 际上 是 一 动 态 的追 逃 问 题 , 截 拦
器本 身和 目标 的部 分状 态 值 不 可 能得 到 , 即使 得 到
vr S a odrbs e .T e i l inr u s h wta e u a c lwh s odpr r a c a d e, Oih s o ut s h mu t sl o th i nea a o e om ne n t g o ns s a o e ts h t gd g f
v l e n a pl a i n a u s i p i to . c
K e r Gu d n e fw Op i lc n r f SMVS Ro u t es y wo ds i a c a tma o to b sn s
也可 能受 噪声 和不确 定性 干扰 。另 一主要 缺 点是最
维普资讯
Fb20 e.06 Vo. 4。 . 1 2 NO 1
Ae o pa e Co to r s c n rl
航
天 控 制
・4 ・ 9
基于 L QR/ MVS的鲁 最优 制导 律研 究 S 棒
沈 明辉 陈 磊 吴瑞 林
国防科 技大学 航 天与材 料工程 学 院 , 长沙 4 0 7 10 3 摘 要 针 对 导 弹 在 拦 截 机 动 目标 的 特 点 , 最 优 控 制 中 的 线 性 二 次 调 节 以 ( Q 和 滑模 变结构 ( MV ) L R) S S 为理 论 基础 , 导 出一鲁 棒 最优 制 导律 。 它综合 了 推 L R和 S S的优 点 . 仅 脱靶 量和 消耗 能 量 小 , 且 对 目标 机 动 等 干 扰 不 敏 Q MV 不 而 感, 具有 鲁棒 性 。仿真 结果表 明 , 所得 制 导律 具 有 良好 的性 能 , 有 一 定 的应 用 具
一种具有机动目标加速度补偿的制导律设计

一种具有机动目标加速度补偿的制导律设计制导律是制导系统中的关键算法,用于使导弹或飞行器能够准确地追踪和击中目标。
针对机动目标的设计,需要考虑到目标的速度和加速度变化,以及制导系统的响应时间和调整能力。
本文将介绍一种具有机动目标加速度补偿的制导律设计,以提高制导系统的精确性和鲁棒性。
一、引言在导弹或飞行器的制导系统中,目标通常会进行机动,即改变其速度和加速度,以避免被击中。
传统的制导律设计仅考虑目标的速度变化,并采用比例导引或自抗扰制导等方法来追踪目标。
然而,对于具有较大加速度变化的机动目标,单一的速度补偿往往无法满足要求。
二、机动目标加速度补偿的制导律设计为了实现对机动目标的精确追踪,需要引入目标加速度的补偿。
具体的制导律设计可以分为以下几个步骤:1. 目标模型建立针对机动目标,需要建立一个合适的数学模型来描述其运动状态。
常见的模型包括匀速运动模型、加速度模型等。
根据实际情况选择适合的模型,以便计算和预测目标的位置和速度。
2. 目标状态估计通过传感器获取目标的位置和速度信息,并结合目标模型进行状态估计。
利用滤波算法(如卡尔曼滤波)可以获得对目标状态的估计值,作为制导律设计的输入。
3. 制导律设计基于目标状态的估计值和目标模型,设计合适的制导律以使导弹或飞行器能够追踪目标。
在速度补偿的基础上,引入加速度补偿项,通过预测目标的加速度信息来修正制导指令。
4. 制导性能评估对设计的制导律进行性能评估,包括追踪精度、鲁棒性、抗干扰能力等。
利用仿真或实验数据进行验证,不断优化和调整制导律的参数以达到最佳的制导效果。
三、案例研究为了验证该制导律设计的有效性,进行了一系列的仿真和实验。
以导弹制导系统为例,选择了一种常见的机动目标,并模拟其速度和加速度变化。
通过设计的制导律进行导弹的仿真追踪,得到了较好的追踪精度和鲁棒性。
四、结论本文提出了一种具有机动目标加速度补偿的制导律设计,以提高制导系统对机动目标的追踪能力。
制导率和制导律-概述说明以及解释
制导率和制导律-概述说明以及解释1.引言概述部分:制导率和制导律是导航和控制领域中两个重要的概念。
制导率是描述系统的导航性能的指标,它反映了系统在实际导航中的精度和稳定性。
而制导律则是指导系统在导航过程中采取何种控制策略来实现系统的目标。
本文将深入探讨制导率和制导律的含义、重要性以及影响因素,从而为导航和控制技术的研究和应用提供理论依据和指导意义。
"3.1 总结与回顾":{},"3.2 展望未来研究方向":{},"3.3 结论":{}}}}请编写文章1.1 概述部分的内容文章结构如下所示:第一部分是引言部分,介绍了文章的概述,文章结构和目的。
第二部分是正文部分,包括了制导率和制导律两个主要内容。
在制导率部分,将会介绍其定义和概念、重要性和影响因素。
在制导律部分,将会讨论其定义、作用和实际应用。
第三部分是结论部分,将对整篇文章进行总结与回顾,展望未来研究方向,并得出结论。
通过以上结构,读者可以清晰地了解本篇文章的框架和内容安排。
3.3 结论":{}}}}请编写文章1.2 文章结构部分的内容1.3 目的本文的目的是探讨制导率和制导律在现代科技和工程中的重要性和应用。
通过对制导率和制导律的定义、影响因素、作用和实际应用进行深入分析,旨在帮助读者更好地理解这两个概念的关系以及它们在实际工程中的应用情况。
同时,本文也将总结制导率和制导律在工程设计、控制系统和导航导弹等领域的重要性,展望未来可能的研究方向,为相关领域的科研工作提供参考和借鉴。
通过本文的研究,读者可以深入了解制导率和制导律对于现代技术和工程的重要性,进一步推动相关领域的发展和进步。
2.正文2.1 制导率2.1.1 定义和概念制导率是指在一定时间内,受导航系统引导的目标物体达到目标的准确程度。
通俗来讲,制导率是评价导航系统指引效果的指标,衡量了目标到达预定位置的准确性。
制导率通常以百分比或小数形式表示,如80或0.8。
攻击大机动目标的变结构末制导律设计

攻击大机动目标的变结构末制导律设计为了攻击大型机动目标,智能导弹系统需要使用变结构模型来控制导弹末制导律。
变结构模型是一种基于系统切换的控制方法,通常用于控制复杂系统或需要对外界干扰作出反应的系统。
在导弹系统中,变结构模型可以使导弹在不同的情况下选择不同的控制器,并且能够处理部分失效或损坏的控制器的情况。
为了设计有效的变结构末制导律,需要考虑以下几个方面:1. 目标追踪和定位在攻击大型机动目标时,导弹系统需要能够快速追踪和定位目标。
传感器系统和导航系统需要协同工作,以确定目标的位置、速度和加速度等信息。
同时,导弹系统需要实时地跟踪目标的变化,以便及时采取适当的措施来应对目标的机动。
2. 切换控制器变结构模型需要在不同的情况下选择不同的控制器。
比如,在攻击目标时,导弹系统可以采用跟踪控制器来维持导弹的零偏差,同时采用预测控制器来估计目标的未来位置,以便导弹能够提前调整姿态和引导角,以便捕捉目标。
在目标机动时,导弹系统可以切换到自适应控制器,根据目标的运动状态和导弹的动态特性来调整末制导律,以确保导弹能够精确地命中目标。
在设计变结构末制导律之前,需要对不同的控制器进行仿真和优化。
控制器仿真可以在不同的环境和故障情况下测试控制器的性能,以确定各个控制器的优缺点。
同时,也可以通过仿真来优化末制导律的设计,以确保导弹能够在各种情况下实现精确制导。
4. 实时反馈控制为了使导弹系统能够快速响应目标的变化,末制导律需要实现实时反馈控制。
实时控制可以让导弹系统动态地适应目标的运动状态,从而确保导弹能够跟踪目标并精确地命中目标。
总之,攻击大型机动目标的变结构末制导律设计需要考虑目标追踪和定位、切换控制器、控制器仿真和实时反馈控制等方面。
通过合理的末制导律设计,可以使智能导弹系统具备较高的制导精度和攻击能力,从而有效实现对大型机动目标的精确攻击。
高速飞行器博弈制导与机动控制

高速飞行器博弈制导与机动控制
高速飞行器博弈制导与机动控制是指在高速飞行器的导弹攻击或防御行为中,通过博弈论和控制理论来实现制导和机动控制的最优化问题。
在高速飞行器导弹攻击场景中,制导是指导弹自动追踪目标并实现精确打击的过程。
博弈制导的目标是通过博弈论的方法,根据敌我双方的态势变化和对手的动作,确定最优的制导策略,以提高导弹的命中率和打击效果。
博弈制导需要考虑导弹的航迹规划、目标搜索与锁定、制导命令生成等问题,同时需要与敌方目标进行博弈,根据对方的动作和反应进行策略调整。
在高速飞行器防御场景中,机动控制是指通过改变飞行器的航迹和姿态,来弥补导弹与目标之间的距离和速度差异,以规避敌方导弹的攻击。
机动控制的目标是根据导弹的追踪能力和航迹预测,确定最佳的机动策略,以最大程度地减小导弹的命中概率。
机动控制需要考虑飞行器的动力学特性、控制算法和飞行器的能力限制,同时需要根据导弹的攻击特性和航迹预测进行策略调整。
高速飞行器博弈制导与机动控制是一个复杂的优化过程,需要综合考虑飞行器和导弹的特性、环境条件和敌我双方的动作,通过建立数学模型和控制算法,寻求最优的制导和机动策略,以提高战斗力和生存能力。
这是一个多学科交叉的领域,需要深入研究飞行器动力学、控制理论、博弈论和优化算法等内容,以应对复杂多变的战斗环境。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
补偿目标机动和制导动力学的制导律
目标机动和制导动力学的制导律是指,在导弹或其他制导武器与目标进行交互的过程中,如何有效地应对目标的机动和制导系统的影响,以确保制导武器能够准确地击中目标。
目标机动主要指目标在空间中进行的各种加速度变化,包括运动速度、加速度、角速度等
变化。
制导动力学指制导系统中的动力学特性,包括导弹的惯性、控制系统、电子装备等
方面的考虑。
对目标机动和制导动力学的制导律,既需要考虑导弹自身的动力学特性,也需要根据
目标的特性进行相应的调整。
下面介绍几种常见的补偿方法:
1. 比例导引补偿
比例导引补偿方法是最常用的一种补偿方法,它通过根据目标和导弹之间的距离差异,来调整导引系统的控制命令。
具体来说,导弹在发射后,首先会根据预设的导引规律进行
制导,当目标机动或者导弹运动状况有变化时,导引系统会根据差异大小,对控制命令进
行相应的补偿调整,以便更好地跟踪目标。
比例-微分导引补偿是比例导引的改进方法。
它的基本思路是,除了根据目标和导弹
之间的距离差异,还需要考虑目标和导弹之间的速度差异和加速度差异。
在比例导引的基
础上,微分导引会对差分值进行计算,并在导弹运行过程中根据差分值进行控制命令的相
应调整。
3. 倒置差值导引补偿
倒置差值导引补偿方法是另外一种常见的补偿方法。
它的思路是,先预测目标未来的
位置和运动轨迹,然后将预测值与实际值相减,得到差异值。
将差异值乘以一个系数,然
后对导引系统的控制命令进行相应的调整。
这种方法可以有效降低因目标机动而造成的跟
踪误差,提高导弹的精度。
在实际应用中,通常会采用上述多种补偿方法的组合,以应对不同情况下的制导需求。
对于高速机动目标和高精度制导系统而言,补偿目标机动和制导动力学的制导律,将是制
导系统设计中至关重要的一个环节。