1网络图论
1网络图论
§1-2 树和树余·树支和连支
树(tree):
树是一个连通图的子图,该子图中包含了连通图G
的全部节点,但不包含任何回路。
树余(cotree) :
连通图中与树互补的子图叫做树余。
树支(tree branch): 树中的支路叫做树支。
连支(link) : 树余中的支路叫做连支。
基本回路(fundamental loop): 只包含一条连支的回路叫做基本回路。 基本回路是唯一的。
对于具有s个分离部分的非连通图,符合下列条件的 支路集叫做割集 。
(1) 该支路集中的所有支路被移去(但所有节点予以 保留)后,原非连通图留下的图形将具有s+1个分离部 分;
(2) 该支路集中,当保留任一支路,而将其余的所有 支路移去后,原非连通图留下的图形仍然只具有s个 分离部分。
基本割集(fundamental cut set) : 只包含一条树支的割集叫做基本割集 。 由每一树支决定的基本割集是唯一的。
B
2
0
1 1 0 1 0
3 1 1 1 0 0 1
B [E Il ]
§1-8 矩阵Q与矩阵B之间的关系
12 3
b1 b2
C1 1 0 QBT C2 0 1
C3 0 0
b3 0 0 1
b4 b5 10 1 1 01
b6 1
1 1
1
1
0 1
0
0 1 1 0 1
1 b1 1 b2
路径(path): 由m条不同的支路和m+1个不同的节点依次联接成的一 条通路称为路径。
回路 (loop):
如果路径的始端节点和终端节点重合,这样的路径称 为回路。
连通图(connected graph)和非连通图(disconnected graph) :
数学中的图论与网络知识点

数学中的图论与网络知识点图论是数学中一个重要的分支领域,研究图的结构、性质以及与实际问题的应用。
而网络则是现代社会中的重要组成部分,图论在网络上的应用也日益广泛。
本文将介绍数学中的图论基本概念和网络知识点,以及它们在现实中的应用。
一、图论基本概念1. 图的定义与表示图是由节点(顶点)和边组成的一种数学结构。
节点表示对象,边表示节点之间的连接关系。
图可以用邻接矩阵或邻接表等方式进行表示与存储。
2. 图的分类图可以分为有向图和无向图。
有向图中的边有方向,无向图中的边没有方向。
根据边是否具有权重,图又可以分为带权图和无权图。
3. 图的性质图具有很多重要的性质,例如连通性、度、路径等。
连通性表示图中任意两个节点之间存在一条路径,度表示节点的相邻节点个数,路径是连接节点的边的序列。
二、图论中的常见算法1. 最短路径算法最短路径算法用于求解两个节点之间的最短路径,其中最著名的算法是Dijkstra算法和Floyd-Warshall算法。
Dijkstra算法适用于边权重为非负的图,而Floyd-Warshall算法适用于任意带权图。
2. 深度优先搜索与广度优先搜索深度优先搜索(DFS)和广度优先搜索(BFS)是图的遍历算法。
DFS以深度优先的方式探索图中的节点,BFS以广度优先的方式探索。
这两种算法在解决连通性、拓扑排序等问题中有广泛应用。
3. 最小生成树算法最小生成树算法用于在带权图中找到权重和最小的生成树。
其中Prim算法和Kruskal算法是两种常用的最小生成树算法。
三、网络中的图论应用1. 社交网络与关系分析社交网络是图的一种应用,其中节点表示人,边表示人与人之间的社交关系。
基于图论的算法可以分析社交网络中的社区结构、关键人物等信息。
2. 网络流与最大流问题网络流是指在图中模拟流动的过程,最大流问题是求解从源节点到汇节点的最大流量。
网络流算法可以用于优化问题的求解,如分配问题、进程调度等。
3. 路由算法与网络优化路由算法是网络中常用的算法之一,用于确定数据从源节点到目的节点的传输路径。
电网络理论 第二章图论

电网络理论第二章图论第二章图论图论是电网络理论的重要分支,主要研究对象是图。
图是由节点和边构成的一种抽象模型,被广泛应用于计算机科学、数学和其他相关领域。
本章将介绍图论的基本概念、常用算法以及在电网络中的应用。
1. 图的定义和表示方式图由节点(也称为顶点)和边组成。
节点表示图中的元素,边表示节点之间的关联关系。
图可以分为有向图和无向图两种类型。
有向图中的边有方向性,表示从一个节点到另一个节点的单向关系。
无向图中的边没有方向性,表示节点之间的无序关系。
图可以用邻接矩阵或邻接表来表示。
邻接矩阵是一个二维数组,用于表示节点之间的关系。
邻接表则是由链表构成的数组,每个节点对应一条链表,链表中记录了该节点与其他节点的关系。
2. 图的基本术语和性质图论中有一些基本的术语和性质,包括:- 路径:指从一个节点到达另一个节点所经过的一系列边和节点。
- 简单路径:路径中不含有重复节点的路径。
- 环:起点和终点相同的路径。
- 连通图:图中任意两个节点之间都存在路径的图。
- 强连通图:有向图中任意两个节点之间都存在路径的图。
- 子图:由图中部分节点和对应的边组成的图。
- 度:节点所连接的边的数量。
- 入度和出度:有向图中节点的入边和出边的数量。
3. 常用图论算法图论中有许多重要的算法,下面介绍其中几个常用算法:- 广度优先搜索(BFS):用于查找图中从起点到终点的最短路径,同时可以用于遍历图的所有节点。
- 深度优先搜索(DFS):用于遍历图的所有节点,通过递归的方式沿着路径向前搜索,直到没有未访问的节点。
- 最小生成树(MST):通过连接图中的所有节点,使得生成的树具有最小的总权重。
- 最短路径算法:例如迪杰斯特拉算法和贝尔曼-福特算法,用于查找图中两个节点之间的最短路径。
- 拓扑排序:用于对有向无环图进行排序,使得图中的节点满足一定的顺序关系。
4. 图论在电网络中的应用图论在电网络领域有广泛的应用,包括:- 网络拓扑分析:通过图论算法可以对电网络的拓扑结构进行分析,了解网络中节点之间的连接关系。
计算机网络_图论

If the edge (vi, vj) is in E(G), adj_mat[i][j]=1. If there is no such edge in E(G), adj_mat[i][j]=0.
The adjacency matrix for an undirected graph is symmetric; the adjacency matrix for a digraph need not be symmetric. Merits of adjacency matrix
0 1 3 2 1
0 2 3
6
Adjacent and Incident
If (v0, v1) is an edge in an undirected graph,
v0 and v1 are adjacent The edge (v0, v1) is incident on vertices v0 and v1 v0 is adjacent to v1, and v1 is adjacent from v0 The edge <v0, v1> is incident on v0 and v1 A graph may not have an edge from a vertex, i, back to itself. Such edges are known as self loops. A graph may not have multiple occurrences of the same edge. If we remove this restriction, we obtain a data object referred to as a multigraph. 0
电路-第9章 网络图论基础

网络图论图论是数学的一个分支,是富有趣味和应用极为广泛的一门学科。
(1)图图(a)电路,如果用抽象线段表示支路则得到图(b)所示的拓扑图,它描述了电路的点和线的连接关系,称为电路的图。
定义:图G 是描述电路结点支路连接关系的拓扑图,它是支路和结点的集合。
1)支路总是连接于两个结点上。
2)允许孤立结点存在,不允许孤立的支路存在。
移走支路,该支路连接的两个结点要保留在电路中,而移走结点,则要将连接于该结点的所有支路移走。
电路的图是用以表示电路几何结构的图形,图中的支路和结点与电路的支路和结点一一对应。
9.1 网络图论的基本概念(3)有向图:标示了参考方向的图(2)子图:图G1中的所有支路和结点都是图G中的支路和结点,则称G1是G 的一个子图。
子图示例9.1 网络图论的基本概念(4)连通图图中任何两结点之间存在由支路构成的路径,则称为连通图。
连通图和非连通图示例9.1 网络图论的基本概念(5)回路从某个结点出发,经过一些支路(一条支路仅经过一次)和一些结点(每个结点仅经过一次)又回到出发点所经闭合路径。
树和非树示例(6)树G1是G 的一个子图,且满足以下三个条件:A 、是连通的;B 、包含G 中所有结点;C 、不包含回路。
G1称为G 的一棵树。
9.1 网络图论的基本概念(7)树支、树支数构成树的支路称为树支。
树支数为:割集示例(8)连支、连支数不属于树的支路称为连支。
连支数为:(9)割集、割集方向移走某些支路,图分成了两个分离的部分,则这些支路的集合称为割集。
割集的方向:从一部分指向另一部分的方向。
9.2 关联矩阵、回路矩阵、割集矩阵、及KCL和KVL方程的矩阵形式(1)增广矩阵描述图中结点和支路关联情况的矩阵。
矩阵元素:增广矩阵为n×b 阶矩阵。
图9.2.1图的增广矩阵:9.2.1 关联矩阵A9.2 关联矩阵、回路矩阵、割集矩阵、及KCL 和KVL方程的矩阵形式(2)关联矩阵A增广矩阵每一列对应一条支路,非零元素两个,一个是1一个是-1,表示1号支路从1号结点流向2号结点;每一行代表一个结点,如第1行表示支路1、4、6连在1号结点,且支路1从1号结点流出,支路4流入1号结点,支路6流出1号结点。
图论与网络分析1-确定型网络计划

图论与网络分析1-确定型网络计划图论和网络分析在计划和管理中广泛应用。
在项目管理中,确定型网络计划是一种用于规划和控制复杂项目的有效工具。
本文将介绍确定型网络计划的基本概念和常见技术,以及图论和网络分析在此过程中的应用。
确定型网络计划是一种图形化方法,用于描述和控制项目的活动和资源之间的关系。
它可以帮助项目经理和团队成员确定项目中的关键路径、前后置关系以及资源分配等重要因素,从而有效地规划和管理项目进度。
确定型网络计划通常由节点(表示活动)和连接线(表示活动之间的依赖关系)组成,形成一个有向无环图(DAG)。
在确定型网络计划中,节点表示项目中的具体活动,连接线表示活动之间的依赖关系。
每个节点都有一个时间估计,即完成该活动所需的时间。
通过连接线可以确定活动之间的前后置关系,即某些活动必须在其他活动之前完成。
通过指定这些依赖关系,项目经理可以确定项目的关键路径,即完成整个项目所需的最长时间路径。
确定型网络计划中的关键路径是整个项目的关键,因为它决定了项目的最短时间。
如果关键路径中的任何一个活动延迟,整个项目的进度都会延迟。
因此,项目经理需要重点关注关键路径上的活动,确保其按计划进行。
图论和网络分析在确定型网络计划中起到了重要的作用。
图论是研究图及其性质的数学理论,可以提供分析和解决确定型网络计划中的复杂问题的方法。
网络分析是一种基于图论的数学模型,用于分析和优化网络中的活动和资源分配。
通过图论和网络分析,项目经理可以更好地理解和管理复杂项目中的活动和资源之间的关系。
在确定型网络计划中,项目经理可以利用图论和网络分析来计算关键路径、活动和资源的最佳分配,以及项目进度和资源利用率的优化。
通过确定关键路径,项目经理可以安排和分配资源,以确保项目按计划进行。
此外,图论和网络分析还可以帮助项目经理进行风险分析,预测项目完成时间和成本,并及时采取必要的措施。
综上所述,确定型网络计划是一种重要的项目管理工具,而图论和网络分析则是实现该方法的重要工具。
网络图论集网络方程
0 1 0 0 0
[Yb
]
0 0
0 0
3 0
0 2
0 0
0 0 0 0 1
0
0
0
0
[Us ] 0 [Is ] 0
1
0
0
1
Yn AYbAT
3 1 0
1 5 1
0 1 2
•
In
•
A Is AYb
•
Us
2 0
1
•
•
Yn Un In
1
4
2 35
12
七、含互感电路分析
Ib Bf T Il
•
•
•
[Bf ZbBf T ]Il [Bf Us Bf Zb Is ]
•
•
Zl Il Usl
1 1 0 1 0 0
[Bf
]
0
1 1 0 1 0
1 0 1 0 0 1
其中: Zl Bf ZbBf T
(回路阻抗矩阵)
•
•
•
Usl Bf Us Bf Zb Is
(回路电压源列向量)
(nxb) (bx1)
•
•
••
五、 节点电压方程 (Ib Yb Ub Yb Us Is )
•
•
Y n
Un
In
(nxn) (nx1) (nx1)
u1 = un2 – un1
-i1u+2 =i4u–ni26 = 0 iu1 +3 =i2+uni23 –=un03
其中:1
[
A]
1
0
I•Y100n n10A1 I•As100YbA100AYbT10U•1s
1
网络图论和网络方程

T2连:{2支,3,集5}1
L2:{1,4,6}
a a
b
4 5
3 c
T3树:{3余,4,5}
d b
L3:{1,2,6}
4 5
cT4树:{1余,5,4}
d L4:{2,3,6}
五、回路和 基本回路
回路: 从图中的某一个顶点出发,沿着边和顶点 不重复地巡行一周回到原出发的顶点所得到的闭合路径称 为回路。回路数用M表示。
1
a 3 b4 c
2
56
如 a3 b
i3 + u3 -
d
有向图G
(1) 图中各边的方向与所对应电路中各元件上的电
流方向一致;
(2)取各支路的电压与电流方向为关联方向。
3. 子图和补图 实例
1
1
a 3 b4 c =a 3 b
2 56
2
c +b 4
c
G1和G2 的总和包括
5 6 了G 的全部
支路和节点。
(2) 连支:对一个图G 除去所选树的树支以外的每个
支路称为连支,用L支表示。
(3)树余(连支集):与树互补的子图称为树余,又称
连支集,用L表示。
如
1
3 b4
a
a
c
2 56
2
b c
56
a 3b c
56
d
d
d
T1:{2,5,6}
T2:{3,5,6}
G
树支:T支为2,5和6 连支:L支为1,3和4
LT支支为为13,,25和和46
B1 {2,4,6} B2 {3,5,6}
B3 {1,4,5} B4 {2,3,4,5}
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
树支和连支的个数
节点数:6
树支数:5 连支数:4
支路数:9
一个节点数 为nt=n+1, 支路数为b的 连通图G,无 论如何选树
,恒具有n条 树支和b-n
条连支。
基本回路:
只包含一条连支的回路叫做基本回路或单连 支回路。
由每条连支决定的 基本回路是唯一的。
基本回路数:b-n
基本回路数取决于连支数
平面图:
④
7
①
②5 ③
①
②5 ③
3
3
4
1
2
6
④
1
④
基本回路: 12、134、1356、37
基本割集: 1246、3467、56
课堂练习
另选一棵树,列出各基本回路的支路集和各基本割集
的支路集。
§1-5 关联矩阵
描述节点和支路之间的关联情况的矩阵
Aa的每一行对应于一个节点,每一列对应于一条支路, 每一个元素aik定义如下:
电路原理(I-2)
主要内容
网络图论 网络方程的矩阵形式 网络的状态方程 二端口网络 均匀传输线的正弦稳态响应 无损耗均匀传输线的波过程
第一章 网络图论
网络图论又称为网络拓扑学,由数学家欧 拉创始,目的是采用图的理论对电路的结构及 其连接性质进行分析和研究。
从五十年代后,图论在电路理论中日益得 到重视,特别是对于大型复杂网络的分析。
一个节点数为nt=n+1,支路数为b的连 通图G,无论如何选树,恒具有:
n个基本割集、b-n个基本回路
例
例. 绘出下图所示电路的有向图,选出一棵树,列出 各基本回路的支路集和各基本割集的支路集。
1 R3
R2 C1
US2
gU5
US3
2
L4
R5
U5 3 iS6
R6
7
①
②5
4
③
3
4
1
2
6
④
①
②5 ③
3
1
的答案是否定的。
B
在七桥问题中,欧拉用点表示陆地,用线段 表示桥。图论中,把一些事物及其之间的联系用 点和连接于点与点之间的线段来表示,因此,图 就是一些点与线段的集合。
本章主要内容:
1. 介绍网络图论的基本概念; 2. 列写关联矩阵A、基本割集矩阵Q、基
本回路矩阵B; 3. 讨论Q与B的关系。
§1-1 网络的图
凡是能在一个平面上绘出,而又不致有两条 支路在一个非节点处交叉的图,称为平面图。
平面图的网孔数等于图的基本回路数 即:m=l=b-(nt-1) =b-n。
§1-3 割 集
任一连通图G的割集C是满足以下两个条件的支路集: 1. 该支路集中的所有支路被移去(但所有节点予以保留 )后,原连通图留下的图形将是两个彼此分离而又各自 连通的子图 ; 2. 该支路集中,当保留任一支路,而将其余的所有支 路移去后,原连通图留下的图形仍然是连通的。
C1
C5
C2
C1(1, 4, 7,9)
C3
C2(2, 8, 9)
C4
C3(3, 4, 7, 8)
C4(5, 7, 8)
C5(6, 4, 7)
任一连通图可选不同的树,但是树一旦选定, 基本割集就唯一确定了。
基本割集数取决于树支数
小结:
对任一较复杂的连通图G,可以选出很 多个回路和割集。但树一经选定后,连通图 G中的树支和连支就完全确定了,因此,连 通图中的基本回路和基本割集也就完全确定 了。
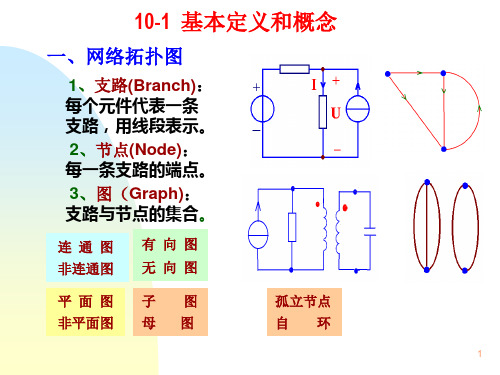
支路:每个二端元件用一条线段表示(无论长短曲直), 即为一个支路。
[注] 有伴电压源、有伴电流源可构成复合支路
节点:支路的端点。 网络的图(拓扑图):
节点(点)和支路(线段)的集合 ,符号G表示
网络的图
网络的图只表明网络中各支路的联接情 况,而不涉及元件的性质。即它只是用以表 示网络的几何结构(或拓扑结构)的图形。
(1) 若节点i与支路bk无关联,则aik=0;
Aa
aik
nt b
(2) 若节点i与支路bk有关联,且支路 bk的参考方向是离开节点i 的(正向关 联),则aik=1;
(3) 若节点i与支路bk有关联,且支路bk的参考方向是 指向节点i的(反向关联),则aik= 1。
网络的图
M
右图网络的网络图中包含有
两个独立部分。虽然网络中存在互 感,但在网络图中并不反映出磁耦 合M,因为M属于网络中支路的特 性,而不属于网络图的性质。
一个网络图可以有多个独立部分。
左面两个图,上面的图中包
含有一个单独节点,下面的图中
有一条支路的两端终止在同一个
节点上,称“自环”。这些情况
都属于图,但对“自环”图,将
每一树支必定可以和若干连支一道构成一个割集
只包含一条树支的割集叫基本割集(单树支割集)
每一树支只能与其所属各基本回路中的连支一道构 成一个基本割集。
C1
C2
C3
C1(1, 6, 9)
C2(2, 8, 9)
C4
实线:树支 虚线:连支
C5
C3(3, 6, 8)
C4(4, 6, 7)
C5(5, 7, 8)
C
桥问题就变为一道数学问题:在左图中是否
D 可能连续沿各线段,从某一始点出发只经过
各线段一次且仅仅一次又回到出发点,即是
B
否存在一条“单行曲线”。
欧拉得出了一般结论,即存 A 在单行曲线的必要、充分条件是
奇次顶点(联接于顶点的线段数
为奇数)的数目为0。显然右图 C
D
不满足此条件,因此,七桥问题
而且Ga和Gb又没有公共的支路,则Ga和Gb互为补图。
§1-2 树和树余·树支和连支
任一连通图G的树T是满足以下三个条件的子图: 1. 该子图中包含了连通图G的全部节点; 2. 该子图也是一个连通图; 3. 该子图中不包含任何回路。
树余:连通图中与树互补的子图。
树、树支
树余、连支
任一连通图G中可以选出许多不同的树。但树 一经选定后,图G的所有支路中,哪些是树支,哪 些是连支,就完全确定了。
不作讨论。
有向图:对图中的支路指定参考方向。
[注] 该方向通常为支路电流方向
4
①
②
1
3
6
2
5
连通图
③
非连通图 连通图:图中任意两节点间至少有一条路径。
子图:若图G1的每个节点和支路也是图G的节点和支路,
即图G1是图G的一部分,则称图G1是图G的一个子图。
[注] 子图中可能出现孤立点
补图:如果图G的子图Ga和Gb包含了G的所有支路和节点,
网络
图
矩阵
图论是数学家欧拉创始的。1736 年欧拉解决了有名的难题,哥尼斯堡 城七桥问题。该镇的普雷格尔河中有 两个小岛,共有七座桥与两岸彼此连 通,问题:从陆地或岛上任一地方开 始,能否通过每座桥一次且仅仅一次 就能回到原地。
A
C
D
B
A
欧拉用顶点表示陆地区域,用联接相应
顶点的线段表示各座桥(如左图),于是七