惯性动作捕捉技术指导-Noitom中文版
ROBOTC-VEX IQ-中文版教材
contentsChapter 1Getting StartedAbout VEX IQ VEX IQWhat is ROBOTC Graphical Language? ROBOTCStandard Build Proper Motor SetupVEX IQ Firmware UpdatesInstalling ROBOTC Graphical on the VEX IQ BrainInitial Wireless SetupUploading Autonomous verse Remote Control ProgramsTroubleshootingIntro to ProgrammingHow do I start a new program?How do I write a program using ROBOTC Graphical Language?How do I save/open a new program?How do I edit a program?Chapter 2Basic movementExpedition Atlantis1Moving ForwardTurningThe Ruins of Atlantis 2Chapter 3SensorsThe Repeat Structure RepeatThe Repeat Command Repeat 1The Repeat Forever Command Repeat 2Repeat Until getMotorEncoder ValueRepeat Until getColorSensorValueRepeat Until getDistanceValueRepeat Until getJoystickValueRepeat Until getTouchLEDValueRepeat Until getGyroValueRepeat Until getBumperSensorValueRepeat Until getTimerValueChapter 4Program FlowThe While Structure Program FlowWhile SmartMotor LoopWhile BumperSensor LoopWhile Gyro LoopThe If Structure Program FlowThe If/Else StructureThe waitUntil Structure Program FlowwaitUntil BtnRUp ExampleProgramming Simple BehaviorsMotor CommandsChapter 5Remote ControlDirect ControlOperator AssistHighriseROBOTCVEX IQ ROBOTCROBOTCROBOTCROBOTCROBOTCROBOTC ROBOTCchapter 1ROBOTC”View”>”Convert Graphical File to Text”ROBOTCROBOTCVEX IQ16chapter 1VEX IQVEXIQ123 VEX IQ”Update ALL Components ”chapter 1VEXVEX IQROBOTCROBOTCUSBVEX IQROBOTCVEX IQchapter 11.ROBOTC for VEX Robotics Graphical2.”New File ””New File ”3. ”New File ””Compile Program ””Download to Robot ”在上面的课程中,我们新建了一个程序,现在我们用最简单的方法完成机器人直行的程序。
Animazoo IGS-物理惯性动作捕捉系统--说明书(中文版)
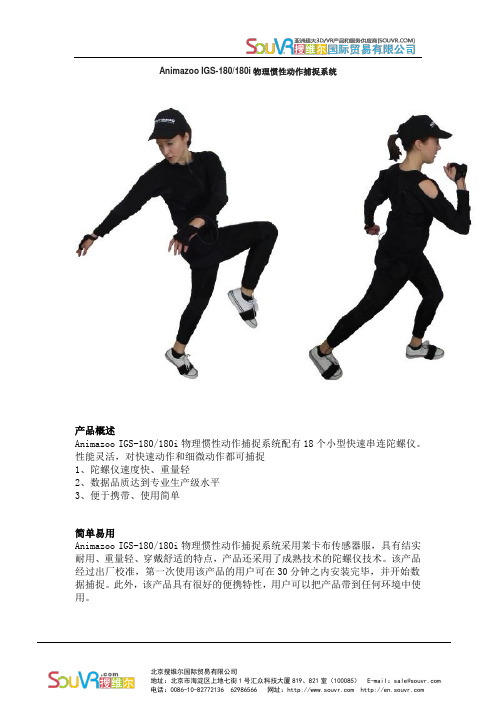
Animazoo IGS-180/180i物理惯性动作捕捉系统产品概述Animazoo IGS-180/180i物理惯性动作捕捉系统配有18个小型快速串连陀螺仪。
性能灵活,对快速动作和细微动作都可捕捉1、陀螺仪速度快、重量轻2、数据品质达到专业生产级水平3、便于携带、使用简单简单易用Animazoo IGS-180/180i物理惯性动作捕捉系统采用莱卡布传感器服,具有结实耐用、重量轻、穿戴舒适的特点,产品还采用了成熟技术的陀螺仪技术。
该产品经过出厂校准,第一次使用该产品的用户可在30分钟之内安装完毕,并开始数据捕捉。
此外,该产品具有很好的便携特性,用户可以把产品带到任何环境中使用。
数据Animazoo IGS-180/180i物理惯性动作捕捉系统可提供高精度细微丰富动作捕捉数据,成本低廉,是专业人士和高等教育机构的理想选择。
Animazoo IGS-180/180i物理惯性动作捕捉系统不会出现标记物阻挡或错位的问题,同时具备无线数据连接的全部优点。
功能齐全Animazoo IGS-180/180i物理惯性动作捕捉系统的数据可以通过Animazoo操作系统进行捕捉,捕捉速率为每秒120帧。
借助Animazoo功能强大的驱动程序和插件,用户可以把捕捉数据导入到MotionBuilder、Maya、3D Studio Max、Blender等常用动画制作软件中进行编辑,此外还配有MotionBuilder、 Siemens Jack、UDK和Unity几款软件的实时驱动程序。
兼容性提供以下软件的实时驱动程序:MotioBuilderMaya3DSBlenderSiemens UGS Jack应用范围适用于3D角色动画、人体姿态模拟、虚拟模型、运动及医疗分析、生物力学分析、游戏互动、高等教育机构等诸多领域。
技术特征数据品质专业陀螺仪速度快、重量轻便于携带、使用简单采用莱卡布传感器服,结实耐用、重量轻、穿戴舒适不会出现标记物阻挡或错位的问题,同时具备无线数据连接的优点特殊应用目前在真实车辆中对驾驶员动作的实时捕捉是一个重大难题,从光学到电磁式动作捕捉目前都无法有效克服技术本身缺点。
详解惯性动作捕捉技术的应用领域

详解惯性动作捕捉技术的应用领域作为一门新兴的动作捕捉技术,惯性动捕的出现,打破了光学动捕占据市场绝对主导的行业格局,被视为动作捕捉界的新生力量。
基于惯性传感器系统的动作捕捉技术是一项融合了传感器技术、无线传输、人体动力学、计算机图形学等多种学科的综合性技术,技术门槛要求很高。
虽然惯性动作捕捉技术出现的时间并不长,但随着它在各行业中的使用,其卓越的性能很快就显示出来了。
惯性动作捕捉,是一种新型的人体动作捕捉技术,它用无线动作姿态传感器采集身体部位的姿态方位,利用人体运动学原理恢复人体运动模型,同时采用无线传输的方式将数据呈现在电脑软件里。
惯性动作捕捉系统出现之前,最常见的是光学动捕技术。
它是通过在演员身上贴marker点,然后用高速摄像机来捕捉marker点的准确位移,再将捕捉数据传输到电脑设备上,由此完成动作捕捉的全过程。
光学动捕的整套设备的成本极为昂贵,架设繁琐,易受遮挡或光干扰的影响,给后期处理工作带来很多麻烦。
对于一些遮挡严重的动作来说,光学动捕无法准确实时还原例如下蹲、拥抱、扭打等动作。
而基于惯性传感器系统的动作捕捉技术的出现,大大改善了这一现状。
和光学动捕技术相比,惯性动作捕捉技术有着对捕捉环境的高适应性,它的技术优势、成本优势和使用便捷的优势,使得它在各行业有着优异的表现。
在影视动画、体验式互动游戏、虚拟演播室、真人模拟演练、体育训练、医疗康复等领域,惯性动作捕捉系统都有着明显优于其他设备的特点。
惯性式动作捕捉系统原理动作捕捉系统的一般性结构主要分为三个部分:数据采集设备、数据传输设备、数据处理单元,惯性式动作捕捉系统即是将惯性传感器应用到数据采集端,数据处理单元通过惯性导航原理对采集到的数据进行处理,从而完成运动目标的姿态角度测量。
在运动物体的重要节点佩戴集成加速度计,陀螺仪和磁力计等惯性传感器设备,传感器设备捕捉目标物体的运动数据,包括身体部位的姿态、方位等信息,再将这些数据通过数据传输设备传输到数据处理设备中,经过数据修正、处理后,最终建立起三维模型,并使得三维模型随着运动物体真正、自然地运动起来。
VICON动作捕捉教材分析说明

VICON动作捕捉系统培训教材一. VICON动作捕捉系统基本原理及课程简介运动捕捉系统是一种用于准确测量运动物体在三维空间运动状况的高技术设备。
它基于计算机图形学原理,通过排布在空间中的数个视频捕捉设备将运动物体(跟踪器)的运动状况以图象的形式记录下来,然后使用计算机对该图象数据进行处理,得到不同时间计量单位上不同物体(跟踪器)的空间坐标(X,Y,Z)。
该技术在众多的领域中都有十分广泛的应用。
在体育训练中它可以帮助教练员从不同的视角观察运动员的动作,并且将位置、速度、加速度等数据进行量化处理,使教练员能够有的放矢地纠正运动员的技术动作,从而大大提高系列效果;在动画制作上,它可以轻而易举地制作出各种人物、动物的复杂动作,使动画制作流程变得简捷高效;在医学的康复治疗领域,它可以准确测量并记录下需要肢体康复治疗的病人的各种运动数据,同时可以为医生观察、分析病人的运动提供诸多帮助;另外该系统在步态分析、虚拟现实、运动分析、机器人控制等诸多领域都有着将巨大的应用前景。
二.设备软件配置Vicon设备组件、Vicon IQ动作捕捉软件、MotionBuilder动画软件,工作站级电脑两台。
三. 培训大纲培训计划时间为10天,以下是详细安排:项目细目时间交货,安装,调试根据交货单清点货物Vicon组件安装1天2天Camera的安装调试IQ,MotionBuilder软件安装1天培训见后培训大纲7天验收根据验收标准验收1天培训大纲每天上课时间:上午9:30??11:30下午1:30??4:00一、说明1 本培训计划根据《动作捕捉技术标准》职业模块标准制定。
2 本培训计划是贯彻能力导向的主要体现,也是培训能容的设置原则。
加强技能培训,注重实际操作能力的培养。
二、对受训人员的资质要求熟悉会用以下一种软件:Vicon IQ,Workstation ,MotionBuilder , Maya ,3ds三、动作捕捉技术培训内容模块培训内容说明动作捕捉技术动作捕捉技术概论系统讲述动作捕捉技术的发展过程;应用领域;动作捕捉技术的基本原理;动作捕捉制作流程CG动画概论结合动作捕捉技术介绍CG动画的发展过程;应用领域;制作流程动作捕捉系统的操作动作捕捉软件的基本操作方法;进行一般动作的捕捉练习;进行特殊部位的动作捕捉动作捕捉数据的管理;对捕捉数据进行修复和处理;系统功能;动作捕捉系统维护动作捕捉系统的维护、校正动作捕捉数据的处理模型绑定将动作捕捉数据输出到各个CG软件中去,包括一般动作和脸部动作将动作数据绑定到角色模型实时动作捕捉进行实时动作捕捉练习四、设施条件4.1 设施条件动作捕捉系统足够的动作捕捉空间;良好的暗度动作捕捉软件;实时动作捕捉软件;动作捕捉桥梁软件五、培训方式方法建议培训应采用小班制,以4人一班为宜。
Animazoo IGS-190-M惯性动作捕捉系统

Animazoo IGS-190-M(mobile)物理惯性动作捕捉系统Animazoo IGS-190-M(mobile)物理惯性动作捕捉系统安装简单,小巧易存,且适合于户外应用环境。
除了这些与其它惯性系统类似的特点外,Animazoo IGS-190-M采用正在申请专利的足迹算法,可提供固定足迹数据。
该足迹算法可以解决数据所存在的模糊不清,难以清洁的问题。
与其它物理惯性动作捕捉系统的最大区别在于其能够与硬件同步,可以对模特髋部进行跟踪并提供整体定位数据(6自由度),这些功能都是普通惯性系统所缺少的。
Animazoo公司开发的ExacTrax超声波跟踪系统为声纳三角测量装置,与“Animazoo IGS-190-M(mobile)物理惯性动作捕捉”连接后,可将Animazoo IGS-190-M升级为“IGS-190-H (hybrid)物理惯性动作捕捉”。
声纳装置发射的定位数据在电视直播、多演员表演中,尤其是可作为指南,对后期制作的光学性能数据进行清洁,消除模糊不清有着重要作用。
ExacTrax超声波跟踪系统配有20个微型扩音器,并能最多增加至96个,可适应L形、不规则形状或甚至各种地板和楼梯。
该系统可与4套Animazoo IGS-190-M(mobile)物理惯性动作捕捉系统组合使用(非体育动作时可配8套)。
“IGS-190-H(hybrid)”软件无须在声纳硬件上使用便可编辑由“IGS-190-M(mobile)”捕捉的数据,所需时间稍长,但用户得到的光学性能结果完全相同。
全部“IGS-190-M (mobile)物理惯性动作捕捉”系统均配有“IGS-190-H (hybrid)”软件的使用证书,软件包括“关键帧编辑器”,是为了本系统特别设计的功能,可以生成光学性能数据或更佳数据。
请您亲身体验它的强大功能。
Animazoo IGS-190-M (mobile)物理惯性动作捕捉系统在每个缚带或莱卡动作捕捉服安装有十九个火柴盒大小的陀螺仪,在皮肤、肌肉和服饰等方面有13年的应用历史。
动作捕捉浅析(二)——光学动作捕捉中英文资料
动作捕捉浅析(一)——光学动作捕捉一、光学式:光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务。
目前常见的光学式运动捕捉大多基于计算机视觉原理。
从理论上说,对于空间中的一个点,只要它能同时为两部相机所见,则根据同一时刻两部相机所拍摄的图像和相机参数,可以确定这一时刻该点在空间中的位置。
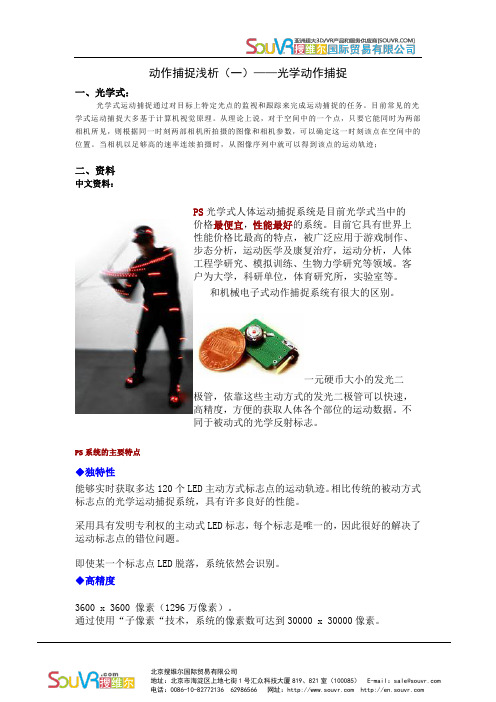
当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹;二、资料 中文资料:PS 光学式人体运动捕捉系统是目前光学式当中的价格最便宜,性能最好的系统。
目前它具有世界上性能价格比最高的特点,被广泛应用于游戏制作、步态分析,运动医学及康复治疗,运动分析,人体工程学研究、模拟训练、生物力学研究等领域。
客户为大学,科研单位,体育研究所,实验室等。
和机械电子式动作捕捉系统有很大的区别。
一元硬币大小的发光二极管,依靠这些主动方式的发光二极管可以快速,高精度,方便的获取人体各个部位的运动数据。
不同于被动式的光学反射标志。
PS 系统的主要特点◆独特性能够实时获取多达120个LED 主动方式标志点的运动轨迹。
相比传统的被动方式标志点的光学运动捕捉系统,具有许多良好的性能。
采用具有发明专利权的主动式LED 标志,每个标志是唯一的,因此很好的解决了运动标志点的错位问题。
即使某一个标志点LED 脱落,系统依然会识别。
◆高精度3600 x 3600 像素(1296万像素)。
通过使用“子像素“技术,系统的像素数可达到30000 x 30000像素。
Optical Motion CaptureYiannis Aloimonos and Gutemberg Guerra-FilhoComputer Vision LaboratoryCenter for Automation ResearchInstitute for Advanced Computer StudiesDepartment of Computer ScienceUniversity of MarylandCollege Park, Maryland 20742-3275, USAMotion capture is the process of recording real life movement of a subject as sequences of Cartesian coordinates in 3D space. Optical motion capture (OMC) uses cameras to reconstruct the body posture of the performer. One approach employs a set of multiple synchronized cameras to capture markers placed in strategic locations on the body. A motion capture system has applications in computer graphics for character animation, in virtual reality for human control-interface, and in video games for realistic simulation of human motion. In this tutorial, we discuss the theoretical and empirical aspects of an optical motion capture system. Basically, for a motion capture system implementation; the resources required consist of a number of synchronized cameras, an image acquisition system, a capturing area, and aspecial suit with markers. The locations of the markers on the suit are designed such that the required body parts (e.g. joints) are covered. We present our motion capture system using a framework that identifies different sub-problems to be solved in a modular way. The sub-problems involved in OMC are initialization, marker detection, spatial correspondence, temporal correspondence, and post-processing. In this tutorial, we discuss the theory involved in each sub-problem and the corresponding novel techniques used in the current implementation. The initialization includes setting up a human model and the computation of intrinsic and extrinsic camera calibration. Marker detection involves finding the 2D pixel coordinates of markers in the images. The spatial correspondence problem consists in finding pairs of detected markers in different images captured at the same time with different viewpoints such that each pair corresponds to the projections of the same scene point. Given camera calibration and the spatial matching, the 3D reconstruction of markers (translational data) is achieved by triangulating the various camera views. The temporal correspondence problem (tracking) involves matching two clouds of 3D points representing detected markers at two consecutive frames, respectively. The temporal correspondence module builds a track for each marker where the marker’s 3D coordinates are concatenated according to time. Post-processing consists in labeling each track with a marker code, finding missing markers lost by occlusions, correcting possible gross errors, and filtering noise. Once the translational data is processed, a hierarchical human model may be used to compute rotational data (joint angles). We consider standard data formats available for motion capture data (e.g. bvh, acclaim). Other important techniques used to improve consistency in the motion data are volumetric reconstruction, inverse kinematics, and inverse dynamics. We also cover topics related to editing and manipulation of motion data.Tutorial SlidesThe Language of Human MovementOutline∙⎬Introductiono o Realistic Movement: Synthesis and Analysiso o Motion Capture Technologieso o Applications∙⎬Required Resourceso o Capture Roomo o Body Suito o Camera Equipmento o Acquisition System∙⎬Initializationo o Markers’ Configurationo o Camera Calibrationo o World Coordinate System Alignmento o Background Subtractiono o Kinematic Human Body Model∙⎬Marker/Feature Detectiono o Edgeso o Cornerso o SIFT Features∙⎬Spatial Correspondenceo o Stereo Matchingo o Wide Baselineo o Dense Correspondenceo o Triangulation∙⎬Temporal Correspondenceo o Tracking with Appearanceo o2D and 3D Tracking∙⎬Post-Processingo o Labelingo o Missing Markerso o Rigidity Testo o Motion Data Filteringo o Translational and Rotational Datao o Data File Formats∙⎬Advanced Topicso o Visual Hull Reconstructiono o Monocular Markerless MoCap∙Original Multiview VideoOne approach employs a set of multiple synchronized cameras to capture markers placed in strategic locations on the body. The original videos for the human activities jump and tiptoe are presented in videos 1a and 1b, respectively.Video 1a: Original jump action. Video 1b: Original tiptoe action.Marker DetectionMarker detection involves finding the 2D pixel coordinates of markers in the images. In our system, the subject wears a black suit with white markers in a squared shape. Red circles represent the markers detected by our system in videos 2a and 2b.Video 2a: Markers detected in jump action. Video 2b: Markers detected in tiptoe action.Spatial CorrespondenceThe spatial correspondence problem consists in finding pairs of detected markers in different images captured at the same time with different viewpoints such that each pair corresponds to the projections of the same scene point. The pairs of markers computed by our system are displayed in videos 3a and 3b. The matches are represented by disparity vectors for markers in consecutive cameras.Video 3a: Disparity vectors in jump action. Video 3b: Disparity vectors in tiptoe action.3D ReconstructionGiven camera calibration and the spatial matching, the 3D reconstruction of markers (translational data) is achieved by triangulating the various camera views. The reconstructed points are shown in videos 4a and 4b, where the points are virtually inserted in the original background. In videos 5a and 5b, the reconstructed points are projected into different viewpoints.Video 4a: 3D points in the original background (jumpaction). Video 4b: 3D points in the original background (tiptoeaction).Video 5a: 3D points from different viewpoints (jumpaction). Video 5b: 3D points from different viewpoints (tiptoe action).Temporal CorrespondenceThe temporal correspondence problem (tracking) involves matching two clouds of 3D points representing detected markers at two consecutive frames, respectively. Given the correspondence between consecutive frames, a time series of 3D coordinates is built. Videos 6a and 6b draw the trajectories of some markers.Video 6a: Trajectories of markers in jump action. Video 6b: Trajectories of markers in tiptoe action.Post-ProcessingPost-processing consists in labeling each track with a marker code, filling track gaps caused by occlusions, correcting possible gross errors, filtering or smoothing noise, and interpolating data along time. The final result of our Optical Motion Capture System is shown in videos 7a and 7b, where a humanoid model, called "flat head", performs the actions.因版权问题,更加详细的资料请登陆搜维尔主站察看。
Qualisys光学动作捕捉系统--说明书(中文版)
Qualisys光学动作捕捉系统Qualisys光学动作捕捉系统在全球拥有众多用户群体,1989年至今,在全球35个国家安装使用已超过700多套。
Qualisys动作捕捉系统是世界上唯一同时支持主动式和被动式动作捕捉的光学式动作捕捉系统,还支持水下捕捉的动作捕捉系统。
Qualisys光学动作捕捉系统使用高速摄像机来精确捕捉带有主动或被动标记点的可测量物体的运动。
该技术可以准确、可靠、实时地将高质量的数据传送给使用人员。
强大的软件分析工具使对基本动作的计算(如速度、加速度、旋转、角度)变得简单,目前光学动作捕捉已经被广泛接受并应用在全球各个领域。
它让使用其他方式难以测量的动作捕捉变得简单。
Oqus 500高速视频动作捕捉摄像机为Qualisys动作捕捉系统提供了一个新的平台,除了精密度和实时标记以外,该像机还能录制高速度、高分辨率的视频。
此双重功能性为全新的应用领域开启了一扇大门。
Qualisys第三代高质量像机,装置了独特的实时计时器。
Oqus 500高速视频动作捕捉摄像机主要特色:●高速运动捕捉●高速视频●传感器分辨率:0.3,1.3,像素4M●与网络实时●适合于较低滞后时间的体系机构●无拍摄限制●无标记限制●防水机架●无风扇,无噪音●便携式或固QTM是Qualisys 动作捕捉系统特有的跟踪管理软件,用于和任何型号的Qualisys像机进行无缝的结合,确保快速和准确的数据。
用户可以使用该系统实时的进行2D, 3D和 6DOF运动的捕捉,将延迟降到最低。
QTM可以满足具有丰富经验使用者的所有先进性应用要求,包括从医药学方面到生物工程学。
它不仅能够和强电金属和 EMG设备的无缝结合并同步,还能够将数据及时的导入到第三方软件中,从而促使QTM成为最流行的艺术软件。
QTM 以先进的数据运算法则为基础,确保了高速,高准确和低延迟特色:●2D/3D/6DOF 数据跟踪●标记点和高速视频数据●实时数据流●最低延迟 6ms●自动标记点识别●被动和主动的标记点●视频覆盖图●可扩展的系统Qualisys 光学动作捕捉系统优势1.同时支持主动式和被动式的光学动作捕捉系统在新加坡的Republic Polytech室外游泳池中安装了 8个水下拍摄系统。
IgorPro中文操作手册-1
Vicon动作捕捉系统操作手册
Vicon动作捕捉系统操作手册目录目录 (2)1.1 仪器简介 (3)1.2 仪器主要部件 (4)1.2.1 硬件设施 (4)1.2.2硬件的连接 (6)2.1摄像机设置和采集区域选择 (9)2.2标定 (17)2.2.1定位MX cameras ,使用“Aim MX cameras”选项 (17)2.2.2 标定MX cameras ,使用“Calibrate MX cameras”选项 (19)2.2.3 设定拍摄区域的原点 (23)2.3 数据采集 (25)2.3.1 粘贴标志点及形态学测量 (25)2.3.1.1 两套方案优缺点比较 (26)2.3.1.2 注意事项 (26)2.3.1.3 操作步骤 (26)2.3.2 动作采集 (31)2.3.2.1 建立新的database (31)2.3.2.2 建立静态模型 (34)2.3.2.3 采集实验动作 (41)3.1 数据的处理 (43)3.2 数据的输出 (50)3.2.1 查看处理后的数据 (50)3.2.2 输出处理后的数据 (51)1. 仪器的主要介绍其中包括,仪器的基本信息,主要部件组成,硬件的安装和设置(应包括硬件的连线说明等),仪器的应用等。
如果仪器配有相关的工具附件也在此节进行说明。
1.1 仪器简介英国Oxford Metrics Limited公司是世界上一家非常著名的光学动作捕捉(Motion Capture)系统供应商,它的这项技术在70年代服务于英国海军,从事遥感、测控技术设备的研究与生产。
进入80年代他们将自己在军事领域里的高新技术,逐渐用于民用方面,在医疗、运动、工程、生物等诸多领域生产制造用于动作捕捉的Motion Capture系统。
80年代末,OML又将动作捕捉系统技术应用于影视的动画制作领域。
Vicon是英国OML公司生产的光学动作捕捉motion capture系统。
它是世界上第一个设计用于运动捕捉的光学系统,它以自己非凡的技术性能在motion capture系统硬件制造领域赢得了极高的声誉,并且改写了motion capture系统传统意义上涵盖的内容。
动作捕捉技术课程设计
动作捕捉技术课程设计一、教学目标本课程旨在通过动作捕捉技术的学习,让学生掌握动作捕捉技术的基本原理、设备和应用领域。
在知识目标方面,学生需要了解动作捕捉技术的定义、发展历程以及基本原理;掌握动作捕捉设备的工作原理、使用方法和维护技巧;了解动作捕捉技术在不同领域的应用。
在技能目标方面,学生需要能够操作动作捕捉设备,进行简单的动作捕捉实验;能够分析动作捕捉数据,并进行基本的后期处理。
在情感态度价值观目标方面,学生需要培养对动作捕捉技术的兴趣和好奇心,认识到动作捕捉技术在电影、游戏、医疗等领域的应用价值,提高对科技创新的敏感度和认识。
二、教学内容本课程的教学内容主要包括以下几个部分:首先,介绍动作捕捉技术的定义、发展历程和基本原理;其次,讲解动作捕捉设备的工作原理、使用方法和维护技巧;然后,介绍动作捕捉技术在电影、游戏、医疗等领域的应用;最后,通过实际操作,让学生熟练掌握动作捕捉设备的使用和后期处理技巧。
三、教学方法为了提高学生的学习兴趣和主动性,本课程将采用多种教学方法。
包括讲授法,用于讲解动作捕捉技术的基本原理和理论知识;讨论法,用于探讨动作捕捉技术的应用和发展趋势;案例分析法,用于分析具体的动作捕捉应用案例;实验法,用于让学生亲自动手操作动作捕捉设备,提高实际操作能力。
四、教学资源为了支持教学内容和教学方法的实施,本课程将准备以下教学资源:教材,用于提供动作捕捉技术的基本理论和知识;参考书,用于提供更多的动作捕捉技术相关的知识;多媒体资料,用于展示动作捕捉技术的实际应用案例;实验设备,用于让学生进行实际操作和实验。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个部分。
平时表现主要评估学生的课堂参与度、提问回答和团队协作等情况,通过观察和记录来进行评估。
作业主要评估学生的理解和应用能力,通过布置相关的练习题和项目任务来进行评估。
考试主要评估学生对动作捕捉技术知识的掌握程度,通过笔试和实际操作考试来进行评估。