线性系统的数学模型
合集下载
第2章 自动控制系统的数学模型
二、一阶惯性环节(一阶滞后环节)
1、数学表达式 :
2、特点 一阶惯性环节含有一个储能元件,输入 量的作用不能立即在输出端全部重现出来, 而是有一个延缓,即有惯性。 3、实例
例2-2 如图2-2所示的RC串联电路,以总电压ur 为输入,电容上电压uC为输出,试建立其微分方程。
图2-2 RC网络
解(1)确定系统的输入、输出变量,如图已知ur为输入,电 容电压uC为输出; (2)列微分方程组: 由基尔霍夫第二定律有: uR +uC =ur ① 由欧姆定律有: uR=R i ② 1 由电容充放电特性,有:uC= ∫idt ③ c (3)消去中间变量
n υ 他激直流电动
五、振荡环节(二阶滞后环节)
1、自动控制原理的研究对象是自动控制系统 的基本结构,这是本章的重点,要求通过实例掌 握自动控制系统各组成部分及其功能。 2、经典控制理论讨论的是按偏差进行控制的 反馈控制系统,应该了解其控制的目的、控制的 对象和控制的过程;熟悉对控制系统动态性能的 基本要求,即稳、快、准;为进一步掌握控制系 统的性能指标打好基础。
d n c(t ) d n 1c(t ) dc(t ) a0 a1 a n 1 a n c(t ) n n 1 dt dt dt d m r (t ) d m 1 r (t ) dr (t ) b0 b1 bm 1 bm r (t ) m m 1 dt dt dt
第2章 线性系统的数学模型
第2章 线性系统的数学模型
六、纯滞后环节(纯延迟环节)
表达式: c(t)=r(t-τ) 特点:输出比输入滞后一个时间τ。 实例:延时继电器。
2-2 传递函数
传递函数是线性定常连续系统最重要的数 学模型之一,是数学模型在复频域内的表示形 式。利用传递函数,不必求解微分方程就可以 求取初始条件为零的系统在任意形式输入信号 作用下的的输出响应,还可以研究结构和参数 的变化对控制系统性能的影响。经典控制理论 的主要研究方法——根轨迹分析法和频域分析 法都是建立在传递函数基础上的。
线性系统的数学模型

第二章 线性系统的数学模型
描述控制系统输入、输出变量及内部变量之间关 系的数学表达式称为系统的数学模型。
★ 描述控制系统的输入-输出变量数学模型:
微分方程、传递函数、方框图、频率特性
★ 描述控制系统的内部变量数学模型: 状态空间
说明 ◆ 要分析自动控制系统的性能,必须先建立该系统 的数学模型; ◆ 一个物理系统,要处理的问题或要达到的精度不 同,得到的数学模型也不同。
3.反馈
R(S) E(S) + B(S) H(S) C(S)
G(S)
负反馈 正反馈 单位反馈:H(S)=1
主 要 内 容
§2-1 微分方程 §2-2 传递函数
§2-3 典型环节的传递函数及动态响应
§2-4 电气网络的运算阻抗与传递函数 §2-5 方框图 §2-5 反馈控制系统的传递函数
§2-1
微分方程
对于线性定常系统, 可以用线性常系数微分方程 作为其数学模型,如 a 0dnc (t)/dtn +a1dn-1c (t) /dtn-1+…+anc (t) =b0dmr(t)/dtm +b1dm-1r(t)/dtm-1+…+bmr(t) c(t): 系统的输出; r(t): 系统的输入; a0……an ; b0……bm 均为实数,均由系统本身的结
对电气网络,可以不列微分方程,仅利用运算电 路,经过简单的代数运算,就可以求得传递函数!
§2-5 控制系统的方框图
方框图是以图形表示系统的数学模型;
通过方框图,能够非常清楚地表示出信号在系统各
环节之间的传递过程;
方框图可以方便地求出复杂系统的传递函数; 方框图是分析控制系统的一个简明而有效的工具。
八.二阶振荡环节 1、传递函数
描述控制系统输入、输出变量及内部变量之间关 系的数学表达式称为系统的数学模型。
★ 描述控制系统的输入-输出变量数学模型:
微分方程、传递函数、方框图、频率特性
★ 描述控制系统的内部变量数学模型: 状态空间
说明 ◆ 要分析自动控制系统的性能,必须先建立该系统 的数学模型; ◆ 一个物理系统,要处理的问题或要达到的精度不 同,得到的数学模型也不同。
3.反馈
R(S) E(S) + B(S) H(S) C(S)
G(S)
负反馈 正反馈 单位反馈:H(S)=1
主 要 内 容
§2-1 微分方程 §2-2 传递函数
§2-3 典型环节的传递函数及动态响应
§2-4 电气网络的运算阻抗与传递函数 §2-5 方框图 §2-5 反馈控制系统的传递函数
§2-1
微分方程
对于线性定常系统, 可以用线性常系数微分方程 作为其数学模型,如 a 0dnc (t)/dtn +a1dn-1c (t) /dtn-1+…+anc (t) =b0dmr(t)/dtm +b1dm-1r(t)/dtm-1+…+bmr(t) c(t): 系统的输出; r(t): 系统的输入; a0……an ; b0……bm 均为实数,均由系统本身的结
对电气网络,可以不列微分方程,仅利用运算电 路,经过简单的代数运算,就可以求得传递函数!
§2-5 控制系统的方框图
方框图是以图形表示系统的数学模型;
通过方框图,能够非常清楚地表示出信号在系统各
环节之间的传递过程;
方框图可以方便地求出复杂系统的传递函数; 方框图是分析控制系统的一个简明而有效的工具。
八.二阶振荡环节 1、传递函数
自动控制原理课件2
Tm
GD 2 R 375 cecm
uf Kfn
K f 反馈电压和转速之间的 比例系数
(3)消去中间变量得直流调速系统的动态微分方程
1 T d T K m kd d 2 n 2t 1 T m K kd d n tn ( 1 K K r k )C eU g
其中 Kr K1K 为s正向通道电压放大系数
R(S)
E(S)
G(S)
-
B(S)
H(S)
Y(S)
2.结构图的组成: (1)信号线:带箭头的直线,箭头表示信号传递方向。 (2)引出点(分离点):表示信号引出或测量的位置。 (3)比较点(相加点):对两个以上信号加减运算。 (4)方框:方框图内输入环节的传递函数。
3 .动态结构图的绘制步骤: (1)确定系统输入量与输出量。 (2)将复杂系统划分为若干个典型环节。 (3)求出各典型环节对应的传递函数。 (4)作出相应的结构图。 (5)按系统各变量的传递顺序,依次将各元件的结构图连接起来。
二、结构图的简化法则 常用的结构图变换方法可归纳为两类:一类是环节的合并,另一类是信号的分支点或相
加点的移动。 结构图的变换必须遵循的原则是:变换前后的数学关系保持不变,因而也称为结构图的
等效变换。
(一)环节的合并 法则一 环节串联,传递函数相乘。
法则二 环节并联,传递函数相加。
法则三 反馈连接的等效传递函数。
(6)延迟环节 (时滞环节、滞后环节) 特点:输出信号经过一段延迟时间τ 后,可完全复现输入信号。
y(t)/r(t)
0τ
r(t) y(t)
t
G(s) es R(s) e s Y(s)
2.4 系统动态结构图
一、概念 1.动态结构图:是描述系统各组成元件之间信号传递关系的数学图形,它 表示了系统的输入输出之间的关系。
自动控制原理 线性系统的数学模型传递函数
2. 惯性环节(非周期环节)
惯性环节的动态方程是一个一阶微分方程: T dc(t) c(t) Kr(t) dt
其传递函数为:
G(s) C(s) K R(s) Ts 1
式中 T—— 惯性环节的时间常数 K—— 惯性环节的增益或放大系数
12/47
§2.3 传递函数
当输入为单位阶跃函数时,其单位阶跃响应为:
24/47
§ 2.4 方框图
在控制工程中,为了便于对系统进行 分析和设计,常将各元件在系统中的功能 及各部分之间的联系用图形来表示,即方 框图和信号流图。
25/47
§ 2.4 方框图
2.4.1方框图的概念及其表示
方框图也称方块图或结构图,具有形象和直观的 特点。
系统方框图是系统中各元件功能和信号流向的 图解,它清楚地表明了系统中各个环节间的相 互关系。
n个环节串联后总的传递函数 : G(s) C(s) X1(s) X 2 (s) C(s) R(s) R(s) X1 (s) X n1 (s) G1 (s)G2 (s) Gn (s)
34/127
§ 2.4 方框图
环节串联后总的传递函数等于串联的各个环节传递 函数的乘积。
环节的串联
RC网络
35/47
d nc(t) d n1c(t)
dc(t)
a0 dt n a1 dt n1 an1 dt anc(t)
b0
d mr(t) dt m
b1
d m1r(t) dt m1
bm1
dr(t) dt
bmr(t)
式中c(t)为输出量,r(t)为输入量 。
设c(t)和r(t)及其各阶导数初始值均为零,对上 式取拉氏变换,得:
G(s) KTd s Td s 1
惯性环节的动态方程是一个一阶微分方程: T dc(t) c(t) Kr(t) dt
其传递函数为:
G(s) C(s) K R(s) Ts 1
式中 T—— 惯性环节的时间常数 K—— 惯性环节的增益或放大系数
12/47
§2.3 传递函数
当输入为单位阶跃函数时,其单位阶跃响应为:
24/47
§ 2.4 方框图
在控制工程中,为了便于对系统进行 分析和设计,常将各元件在系统中的功能 及各部分之间的联系用图形来表示,即方 框图和信号流图。
25/47
§ 2.4 方框图
2.4.1方框图的概念及其表示
方框图也称方块图或结构图,具有形象和直观的 特点。
系统方框图是系统中各元件功能和信号流向的 图解,它清楚地表明了系统中各个环节间的相 互关系。
n个环节串联后总的传递函数 : G(s) C(s) X1(s) X 2 (s) C(s) R(s) R(s) X1 (s) X n1 (s) G1 (s)G2 (s) Gn (s)
34/127
§ 2.4 方框图
环节串联后总的传递函数等于串联的各个环节传递 函数的乘积。
环节的串联
RC网络
35/47
d nc(t) d n1c(t)
dc(t)
a0 dt n a1 dt n1 an1 dt anc(t)
b0
d mr(t) dt m
b1
d m1r(t) dt m1
bm1
dr(t) dt
bmr(t)
式中c(t)为输出量,r(t)为输入量 。
设c(t)和r(t)及其各阶导数初始值均为零,对上 式取拉氏变换,得:
G(s) KTd s Td s 1
自动控制原理课件 第二章 线性系统的数学模型
c(t ) e
dt Leabharlann t
c( s )
g ( ) r ( ) d e s ( ) d 0 0 g ( )e s r ( )e s d d 0 0
0
g ( )e
5) 闭环系统传递函数G(s)的分母并令其为0,就是系统的特征方 程。
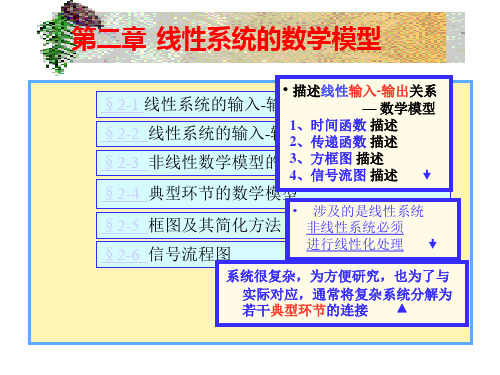
• 涉及的是线性系统 非线性系统必须 进行线性化处理
§2-6 信号流程图
系统很复杂,为方便研究,也为了与 实际对应,通常将复杂系统分解为 若干典型环节的连接
数学模型的定义 数学模型: 描述系统变量间相互关系的动态性能的运动方程 建立数学模型的方法:
解析法: 依据系统及元件各变量之间所遵循的物理或化学规律列写出相 应的数学关系式,建立模型。 自动控制系统的组成可以是电气的,机械的,液压的,气动的等等,然 而描述这些系统的数学模型却可以是相同的。因此,通过数学模型来研 究自动控制系统,就摆脱了各种类型系统的外部关系而抓住这些系统的 共同运动规律,控制系统的数学模型是通过物理学,化学,生物学等定 律来描述的,如机械系统的牛顿定律,电气系统的克希霍夫定律等都是 用来描述系统模型的基本定律。 实验法: 人为地对系统施加某种测试信号,记录其输出响应,并用适当 的数学模型进行逼近。这种方法也称为系统辨识。 数学模型的形式 时间域: 复数域: 频率域: 微分方程 差分方程 传递函数 结构图 频率特性 状态方程
1 例1 : F ( s) ( s 1)(s 2)(s 3) c c c 1 2 3 s 1 s 2 s 3
1 1 c1 [ ( s 1)]s 1 ( s 1)(s 2)(s 3) 6 1 1 c2 [ ( s 2)]s 2 ( s 1)(s 2)(s 3) 15 1 1 c3 [ ( s 3)]s 3 ( s 1)(s 2)(s 3) 10 1 1 1 1 1 1 F ( s) 6 s 1 15 s 2 10 s 3 1 1 1 f (t ) e t e 2t e 3t 6 15 10
《线性系统》课件

NG
线性系统的控制目标
01
02
03
04
稳定性
确保系统在受到扰动后能够恢 复稳定状态。
跟踪性能
使系统输出能够跟踪给定的参 考信号。
抗干扰性
减小外部干扰对系统输出的影 响。
优化性能指标
最小化系统性能指标,如误差 、超调量等。
线性系统的控制设计方法
状态反馈控制
基于系统状态变量进行 反馈控制,实现最优控
稳定性分析
利用劳斯-赫尔维茨稳定判据等 工具,分析系统的稳定性。
最优性能分析
通过求解最优控制问题,了解 系统在最优控制下的性能表现
。
2023
PART 06
线性系统的应用实例
REPORTING
线性系统在机械工程中的应用
总结词
广泛应用、控制精度高
详细描述
线性系统在机械工程中有着广泛的应用,如数控机床、机器人、自动化生产线等。这些系统通过线性 控制理论进行设计,可以实现高精度的位置控制、速度控制和加速度控制,提高生产效率和产品质量 。
时域分析法
通过求解线性常微分方程或差分 方程,可以得到系统的动态响应
,包括瞬态响应和稳态响应。
频域分析法
通过分析系统的频率响应函数,可 以得到系统在不同频率下的动态响 应特性。
状态空间分析法
通过建立系统的状态方程和输出方 程,利用计算机仿真技术对系统的 动态响应进行模拟和分析。
2023
PART 05
2023
PART 02
线性系统的数学模型
REPORTING
线性系统的微分方程
总结词
描述线性系统动态行为的数学方程
详细描述
线性系统的微分方程是描述系统状态随时间变化的数学模型,通常采用常微分 方程或差分方程的形式。这些方程反映了系统内部变量之间的关系及其对时间 的变化规律。
线性系统的控制目标
01
02
03
04
稳定性
确保系统在受到扰动后能够恢 复稳定状态。
跟踪性能
使系统输出能够跟踪给定的参 考信号。
抗干扰性
减小外部干扰对系统输出的影 响。
优化性能指标
最小化系统性能指标,如误差 、超调量等。
线性系统的控制设计方法
状态反馈控制
基于系统状态变量进行 反馈控制,实现最优控
稳定性分析
利用劳斯-赫尔维茨稳定判据等 工具,分析系统的稳定性。
最优性能分析
通过求解最优控制问题,了解 系统在最优控制下的性能表现
。
2023
PART 06
线性系统的应用实例
REPORTING
线性系统在机械工程中的应用
总结词
广泛应用、控制精度高
详细描述
线性系统在机械工程中有着广泛的应用,如数控机床、机器人、自动化生产线等。这些系统通过线性 控制理论进行设计,可以实现高精度的位置控制、速度控制和加速度控制,提高生产效率和产品质量 。
时域分析法
通过求解线性常微分方程或差分 方程,可以得到系统的动态响应
,包括瞬态响应和稳态响应。
频域分析法
通过分析系统的频率响应函数,可 以得到系统在不同频率下的动态响 应特性。
状态空间分析法
通过建立系统的状态方程和输出方 程,利用计算机仿真技术对系统的 动态响应进行模拟和分析。
2023
PART 05
2023
PART 02
线性系统的数学模型
REPORTING
线性系统的微分方程
总结词
描述线性系统动态行为的数学方程
详细描述
线性系统的微分方程是描述系统状态随时间变化的数学模型,通常采用常微分 方程或差分方程的形式。这些方程反映了系统内部变量之间的关系及其对时间 的变化规律。
第二章控制系统数学模型

s s 后,再求 F (s) 的极限值来求得。条件是当 t 和s 0时,等式两边各
有极限存在。
终值定理在分析研究系统的稳态性能时(例如分析系统的稳态误差,求取系统
输出量的稳态值等)有着很多的应用。因此终值定理也是一个经常用到的运算
定理。
7.初值定理: lim f (t) lim sF (s)
18
2
例2-1:写出RLC串联电路的微分方程。
ui
L
R
i
C
uo
ui 输入
uo 输出
[解]:据基尔霍夫电路定理:
L di dt
Ri
1 C
idt
ui
①
uo
1 C
idt
②
由②: i C d,uo代入①得: dt
LC
d 2uo dt 2
RC
duo dt
uo
ui
这是一个线性定常二阶微分方程。
3
例2-2 设一弹簧、质量块、阻尼器组成的系统如图所示,当外力 F(t)作用于系统时,系统将产生运动。试写出外力F(t)与质量块的 位移y(t)之间的微分方程。
uR uc Us
把 uR i R
和
ic
C
duc dt
代入电路,可得到电路的
微分方程:
RC
duc dt
uc
Us
23
现在对于上面的微分方程,我们用Laplace变换求解。
首先,利用Laplace变换中的微分定理,将微分方程变换成如下形式:
RC
duc dt
uc
Us
RCsU c (s) Uc (s) Us R(s)
利用待定系数法可求得:
A 1 ARC B 0
F (s) L[ f (t)] f (t)e st dt 0
有极限存在。
终值定理在分析研究系统的稳态性能时(例如分析系统的稳态误差,求取系统
输出量的稳态值等)有着很多的应用。因此终值定理也是一个经常用到的运算
定理。
7.初值定理: lim f (t) lim sF (s)
18
2
例2-1:写出RLC串联电路的微分方程。
ui
L
R
i
C
uo
ui 输入
uo 输出
[解]:据基尔霍夫电路定理:
L di dt
Ri
1 C
idt
ui
①
uo
1 C
idt
②
由②: i C d,uo代入①得: dt
LC
d 2uo dt 2
RC
duo dt
uo
ui
这是一个线性定常二阶微分方程。
3
例2-2 设一弹簧、质量块、阻尼器组成的系统如图所示,当外力 F(t)作用于系统时,系统将产生运动。试写出外力F(t)与质量块的 位移y(t)之间的微分方程。
uR uc Us
把 uR i R
和
ic
C
duc dt
代入电路,可得到电路的
微分方程:
RC
duc dt
uc
Us
23
现在对于上面的微分方程,我们用Laplace变换求解。
首先,利用Laplace变换中的微分定理,将微分方程变换成如下形式:
RC
duc dt
uc
Us
RCsU c (s) Uc (s) Us R(s)
利用待定系数法可求得:
A 1 ARC B 0
F (s) L[ f (t)] f (t)e st dt 0
线性系统理论全

稳定性判据与判定方法
稳定性判据
在控制工程中,常用的稳定性判据有Routh判据、Nyquist判据、 Bode判据等。这些判据通过分析系统的特征方程或频率响应来判 断系统的稳定性。
判定方法
除了使用稳定性判据外,还可以通过时域仿真、频域分析、根轨 迹法等方法来判定系统的稳定性。这些方法各有优缺点,适用于 不同类型的线性系统和不同的问题背景。
100%
线性偏差分方程
处理离散空间和时间的问题,如 数字滤波器和图像处理等。
80%
初始条件与边界条件
在差分方程中,初始条件确定系 统的起始状态。
状态空间模型
状态变量与状态方程
表示系统内部状态的变化规律 ,揭示系统动态特性。
输出方程
描述系统输出与状态变量和输 入的关系,反映系统对外部激 励的响应。
状态空间表达式的建立
复频域分析法
拉普拉斯变换
将时域信号转换为复频域信号,便于分析系统的稳定性和动态性 能。
系统函数
描述Байду номын сангаас统传递函数的复频域表示,反映系统的固有特性和对输入信 号的响应能力。
极点、零点与稳定性
通过分析系统函数的极点和零点分布,可以判断系统的稳定性以及 动态性能。
04
线性系统稳定性分析
BIBO稳定性
01
线性系统理论全
目
CONTENCT
录
• 线性系统基本概念 • 线性系统数学模型 • 线性系统分析方法 • 线性系统稳定性分析 • 线性系统能控性与能观性分析 • 线性系统优化与综合设计
01
线性系统基本概念
线性系统定义与性质
线性系统定义
满足叠加性与均匀性的系统。
线性系统性质
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
建立数学模型的目的之一:是为了用数学方法 定量地对系统进行分析。当系统微分方程列出后, 只要给定输入量的初始条件,便可以对微分方程 求解。
设:给定量或扰动量为系统的输入量 r , n 被控制量称为系统输出量 y , c 系统的输出量在系统输入量作用下的变动过程称作系
统的响应。 考查:输入量、输出量之间微分方程描述的数学模型。
d
dt
时
方程均有变化
La =0时,且ML =常数
RaJm Cm
dw dt
(
Raf m Cm
Ka)w
Ua
Ra Cm
M
L
整理:
Ta
dw dt
w
KmUa
KmM
L
用图示:
ML
ua 电机
w
例2.直流电机的调速系统
Ur
Ra
U
>
Ua
ML Ut
w
设La=0 输入量Ur 、ML ,输出w
e Ur Ut
Ua Ke
LaJm Cm
d 2w dt 2
Lafm JmRa Cm
dw ( Rafm dt Cm
Ka)w
Ua
La Cm
dM L dt
Байду номын сангаас
Ra Cm
M
L
从方程可看:输入、输出及各阶导数之间无乘积关系 可见:方程线性
输入、输出及各阶导数前系数为常数 可见:方程为线性定常系统。
当ML =0(空载),ML =常数(固定负载),w
电动机和负载折合到电动机轴上的两个变量:
粘性摩擦系数 fm
转动惯量Jm
电动机轴上的转矩平衡方程:
Jm
dm (t)
dt
fmm (t)
Mm (t)
Mc (t)
电动机转速(m t)
折合到电动机轴上的总负载转矩M c (t)
例1.电机在 Ua作用下带动负载转矩为ML物体以w角 速度旋转。
电枢控制式的直流电动机:
1.建立数学模型的方法
解析法(机理)
依据系统及元件各变量之间所遵循的物理或化学规律 列写出相应的数学关系式,建立模型。
实验辨识法
人为地对系统施加某种测试信号,记录其输出响应,并用 适当的数学模型进行逼近。这种方法也称为系统辨识。
数学模型应能反映系统内在的本质特征,同时应对模型的 简洁性和精确性进行折衷考虑。
如:线性化问题
线性化:
实际物理系统一般均为非线性系统,只是非线性程度 有所不同而已,许多系统在一定条件下可被近似视作 线性系统,使问题得到简化。
工程中一般的做法是将模型简化为线性型,以线性模 型为基础,求得系统的近似特性,必要时,再采用较 复杂模型进一步研究。
(4)数学模型的描述方法 时间域:微分方程(一阶微分方程组)、差分方程、 状态方程 复数域:传递函数、结构图 频率域:频率特性
dt
K:阻尼系数 F:阻尼力 y:位移 w:旋转角速度 T:阻尼力矩
5、牛顿定律
F ma
v dx dt
a
dv dt
d2x dt 2
6、电机
电枢电压ua (t) 电枢电流ia (t) 电磁转矩Mm (t)
电枢回路电压平衡方程
ua
(t)
=
La
dia (t) dt
+
Raia (t)
+
Ea
反电势 E(a t)= Ceωm (t)
学习内容: §2-1 线性系统的微分方程
一、数学模型的概念
工程的最终目的是构建实际的物理系统,以完成某些规定的 任务。 如一个实际的调速系统,温控系统等。
采用的方法可分为经验法和解析法去完成设计任务。
经验法中依靠丰富的经验,加之试凑方法。对 比较简单系统,可得到满意结果.
对复杂系统,往往采用解析法。解析法的采用 其前题是应先建立其数学模型,即先建立描述这一 系统运动规律的数学表达式。
注: 微分方程(一般系统); 传递函数(研究输入—输出关系线性定常系统); 图示方法(结构图、信号图);
二、线性系统的微分方程
控制系统的时域数学模型
一个完整的控制系统通常是由若干元器件或环节以一 定方式连接而成的。
对系统中每个具体的元器件或环节按照其运动规律可 以比较容易地列出其微分方程,然后将这些微分方程联 立起来,可求出整个系统的微分方程。
2. 几个概念 对一个复杂系统,建立数学模型一般较困难。
(1)通常的办法是作一些简化系统的假设将系 统理想化,一个理想化的系统称作物理模型。
(2)物理模型的数学描述称作数学模型。
(3)建模:通常指建立物理模型的数学模型
经常遇到的一个问题是准确分析出哪些物理变量和 相互关系是可以忽略的,哪些对模型准确度有决定 性影响。
列原始方程:
Ta
du dt
w
KmUa
KmM
L
Ut Ktw
消去中间变量:Ta
dw dt
(1
KmKtK )w
KmKUr
KmM
L
可见:系统为线性定常一阶系统
负载ML可视为特殊输入量,ML =0时
Ta dw (1 KmKtK)w KmKUr dt
一般考虑线性定常系统(单输入—单输出系统)表达式
an
d nc(t) dt n
an1
d n1c(t) dt n1
a1
d c(t) dt
a0c(t)
预备知识
1、电容
2、电感 3、弹簧弹性力 4、阻尼器
平动阻尼器 旋转阻尼器
ic
(t)
C
duc (t) dt
uL
(t
)
L
diL (t dt
)
F kx k vdt
uc
(t
)
1 C
ic (t)dt
iL (t)
1 L
uL (t)dt
v 1 dF k dt
F kv k dy dt
T k k d
Ra La
if
i ua
Mc
ea
M
ω
J
解:
1.输入量:Ua、ML 输出量:w
2.列写原始方程
Ua iaRa La dia Ea dt
Ea kaw (反电动势与w成正比)
电枢回路方程: Mm Cm ia (电磁转矩与ia成正比)
Mm
ML
Jm dw dt
f mw
3.消去中间变量ia , Ea , Mm
第二章
线性系统的数学模型
学习要求:
1、掌握建立数学模型的一般原理,传递函数的概念, 对于不很复杂的系统能够写出传函;
2、掌握方框图及信号流图化简原则,利用方框图或信号流 图求传函;
3、掌握几种典型环节的传递函数; 4、了解开环传递函数、闭环传递函数、误差传递函数
(内容介绍:微分方程、传递函数、结构图、信号流图)
获取微分方程的步骤:
1. 分析系统工作原理和信号传递变换的过程,确定系统 和各元件的输入、输出量;
2. 从输入端开始,按照信号传递变换过程,依 据各变量遵循的物理学定律,依次列写出各元件、部件的 动态微分方程;
3. 消去中间变量,得到描述元件或系统输入、 输出变量之间关系的微分方程;
4. 标准化:右端输入,左端输出,导数降幂排 序