动力学第一章(3节).
复相反应动力学(1~3节)..
3)相界面的表面状态对复相反应的也将产生直接的 作用。如表面各处活化状态、表面的均匀与否、 相界面处的表面现象的发生都是影响复相反应动 力学的因素。 4)相界面对不同类型的复相反应会产生不同程度的 影响,而不同类型的复相反应在相界面的动力学 行为也有较大差异。
二、复相反应的类型
复相反应的类型实际上与相界面的类型密切相关。
1)固体表面上的气相反应 例如:
1 pt SO2 ( g) O 2 ( g ) SO3 ( g ) 2 1 3 Fe N 2( g ) H 2( g ) NH 3( g ) 2 2
此类复相反应实际上是固体作为催化剂的气相反应, 固体物质并不消耗,但物理性状发生了变化。这类 反应在复相反应中占得比重很大。
a. 当r→∞ ,H2远离镍表面,E势=0; b. H2靠近镍表面时,随r减小势能下降; c. 当r=r0时,势能最低,纵坐标代表物理吸附的吸附 热qp,其值很小。H2与镍表面距离:RNi+rNi,范 +RH+RH,范=1.25+0.8+0.35+0.8=3.2Å d. 当r<r0时,分子间排斥作用导致势能上升;
三、表面反应的反应步骤
表面反应一般是气相或液相反应物分子在固 体催化剂表面上进行的化学反应,反应过程分为 下述几个步骤: (1)反应物分子向固体表面扩散。 (2)扩散到固体表面的反应物分子被固体所吸附。 (3)被吸附的反应物分子在固体表面上发生反应, 生成被固体表面所吸附的产物分子。 (4)被吸附的产物分子脱附至固体表面附近的气相 或液相空间中。 (5)脱附了的产物分子通过扩散而远离固体表面。
3)由于物理吸附于化学吸附在本质上的差异,其宏 观表现也有所不同。一般来说,物理吸附的吸附 热与气体吸附质的冷凝热具有相同的数量级;而 化学吸附热与化学反应的热效应近似,比物理吸 附的吸附热大1~2个数量级。可以理解,物理吸附 往往发生在接近于气体凝聚液化的条件,而化学 吸附则发生于比沸点高得多的温度条件下。 4)化学吸附和物理吸附皆为放热反应,因此温度上 高其吸附率均要下降,但其吸附速率却有较大的 不同。物理吸附一般不需要活化能,其吸附平衡 可瞬间达到。化学吸附往往需要一定的活化能, 因此吸附速率比物理吸附要慢。
【电动力学课件】1-3-4 麦克斯韦方程组-介质的电磁性质

= ∫ E 感 ⋅ dl
L
因此电磁感应定律可写为
d ∫L E感 ⋅ dl = − dt ∫SB ⋅ dS
若回路L是空间中的一条固定回路,则上式中的 对t的全微商可代为偏微商:
∂B ∫L E感 ⋅ dl = −∫S ∂t ⋅ dS
6
化为微分形式后可得:
∂B ∇ × E感 = − ∂t ——这是磁场对电场作用的基本规律。由上式可以
J P = ∂P / ∂t D = ε 0 E + P 得
B ∂D ∇× − M µ = J f + ∂t 0
28
引入磁场强度H,定义为
∂D ∇ × H = Jf + ∂t ② B和H之间的实验关系
H=
B
µ0
−M
改写上式为
实验指出,对于各向同性非铁磁物质,磁化强度 M和H之间有简单的线性关系
2.介质的分类:
①介质分子的正电中心和负电中心重合,没有电偶极矩。 (无极分子) ②介质分子的正负电中心不重合,有分子电偶极矩,但因 分子的无规则热运动,在物理小体积内的平均电偶极矩为 零,故没有宏观上的电偶极矩分布。(有极分子) (3)分子电流:介质分子内部电子运动可以认为构成微观电流。 无外场时,分子电流取向无规,不出现宏观电流分布。
M = χM H
χM称为磁化率。 由此可得: B = µ 0 H + µ 0 M = µ( 0 1 + χ M ) H = µ 0 µ r H = µH µ称为磁导率, µr为相对磁导率。
29
四、介质中的麦克斯韦方程组
∂B ∇ × E = − ∂t ∇ × H = J + ∂D f t ∂ ∇ ⋅ D = ρ f ∇ ⋅ B = 0
汽车动力学

1
加速时间由积分计算或图解积分求出。 用图解积分法时,将a-ua曲线转为1/a-ua曲线,曲线 下两个速度区间的面积表示通过此速度区间的加速时间; 常将速度区间分为若干间隔,通过确定面积△1、△2…来 计算总加速时间。
BJ1040轻型载货汽车加速 时间曲线
2. 汽车爬坡能力的确定 在良好路面上克服Ff+Fw后用来克服坡度阻力时所能爬 上的坡度。此时,du/dt=0,即 Fi = Ft - ( Ff + Fw ) 紧凑型轿车的爬坡度曲线 以Gsinα作为坡度阻力, 代入表达式,得:
汽车驱动力-行驶 阻力平衡图 表征不同车 速时驱动力和行驶 阻力之间的关系。 特征点:最高车速 最高车速, 最高车速 仅有滚动阻力和空 气阻力。 小于最高车 速时,汽车可用剩 余驱动力加速或爬 坡。 需等速行驶 时,发动机可工作 在部分负荷特性。
1. 汽车加速能力的评价 在水平良好路面上行驶时能产生的加速度:不易测量。 加速时间:用直接档行驶时,由最低稳定速度加速到一 定距离或80% umax所需时间。 汽车加速度:
第1节 汽车动力性指标
从获取尽可能高的平均速度考虑,动力性指标有: 最高车速 加速பைடு நூலகம்间 最大爬坡度
1.最高车速uamax
在水平良好的路面上汽车能达到的最高行驶速度(km/h)。
2.加速时间t
表示汽车的加速能力。常用: 原地起步加速时间:汽车以1档或2档起步,并以最大加速强度 换至最高档后达到某一距离(0 402.5m或0 400m)或车速 (0 96.6km/h或0 100km/h)所需要的时间(s)。
二、汽车的行驶阻力
汽车行驶时的各种阻力: 滚动阻力——以符号Ff表示; 空气阻力——以符号Fw表示; 坡度阻力——以符号Fi表示; 加速阻力——以符号Fj表示; 因此汽车行驶的总阻力为: ∑F=Ff+Fw+Fi+Fj
电动力学必背公式
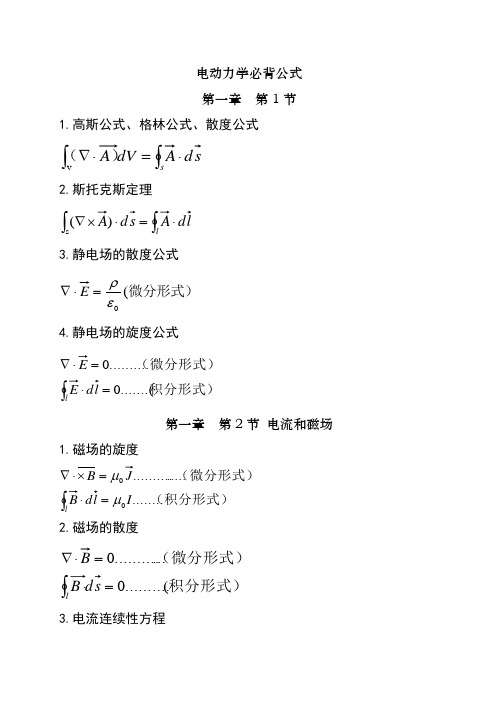
电动力学必背公式第一章 第1节1.高斯公式、格林公式、散度公式⎰⎰⋅=⋅∇v s s d A dV A )(2.斯托克斯定理l d A s d A l ⋅=⋅⨯∇⎰⎰)(s3.静电场的散度公式微分形式)(0ερ=⋅∇E 4.静电场的旋度公式积分形式)(微分形式).......(0..........0=⋅=⋅∇⎰l d E E l第一章 第2节电流和磁场1.磁场的旋度(积分形式)(微分形式)⎰=⋅=⨯⋅∇l I l d B J B .......................00μμ2.磁场的散度⎰=⋅=⋅∇l s d B B 积分形式)(微分形式)(..........0. 03.电流连续性方程=⋅∇∂∂-⋅∂∂-=⋅∇⎰⎰J dv t s d J tJ s V ρρ第一章 第3节 麦克斯韦方程组⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⋅∇=⋅∇∂∂+=⨯∇∂∂-=⨯∇磁场的高斯定律电场的高斯定理安培环路定律法拉第电磁感应定律....................................................................................000.ρερεμμD B t E J H t B E 第一章 第4节 介质的电磁性质1.麦克斯韦方程组⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⋅∇=⋅∇∂∂+=⨯∇∂∂-=⨯∇.’定律Savart -揃iot 实验规律是.相关),磁单单极子不存(描述磁场述磁场是.........0.”定律揅oulomb 关实验规律是描述电述电荷激发电场...........”定律Savart -揃iot 律是激发发磁场,相关实验描述电述电流和变化的.......”电磁感应定律Faraday?场,相关实验规律是描述变述变化的磁场激...............0B B t D J B t B B f ερM B H PE D -=+=001με2.辅助方程第一章 第5节 边值关系⎪⎪⎪⎩⎪⎪⎪⎨⎧=-⨯=-⨯=-⨯=-⨯0)(ˆ)(ˆ)(ˆ0)(ˆ12121212B B eD D e H H eE E e n n n nσα 第一章 第6节 电磁场的能量和能流1.能量守恒⎪⎪⎩⎪⎪⎨⎧⋅-=∂∂+⋅∇+⋅=⋅∇-⎰⎰⎰v f t w s wdV dt d dV v f dV s V V V 微分形式:积分形式:)( 第二章 第1节 静电场 1.电势)称为静电场标势(简称ϕϕ..........-∇=E 2.σϕεϕε-=∂∂-∂∂nn 1122 3.边值关系:21ϕϕ= 4.ερϕ-=∇25.电场能量公式静电场条件静电场条件普遍适用......)()(81.............................21.. (2)1''dVdV r x x W dV W dV D E W ⎰⎰⎰⎰==⋅=∞∞ρρπεϕρ 第二章 第2节 唯一性定理1.泊松方程:ερϕ-=∇22.边值关系:sij sij j n n ∂∂=∂∂=j ji i i ϕεϕεϕϕ或者3.边界条件:sn ∂∂ϕϕ或者s 第二章 第3节 拉普拉斯方程 分离量法1.拉普拉斯方程:ερϕϕ-=∇⇐=∇220 2.球坐标下轴对称拉普拉斯方程通解:)(cos )(n 1θϕn n n nn P R b R a ∑++= 3.球坐标下球对称拉普拉斯方程通解:Rb a +=ϕ 第二章 第6节 电多极矩点多极矩⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧↔∂⋅∂∂=⋅==∑个独立分量个分量,但只有有)()()(561614144,2j i,0230100R y x D R R P R Q j i j i πεϕπεϕπεϕ 第三章 第1节 矢势及微分方程矢势:s d B l d A s L ⋅=⋅⎰⎰第三章 第2节 磁标势 磁标势:⎰⋅=-∇=V m dV J A H 21ϕ。
八年级物理第一章第三节知识点

八年级物理第一章第三节知识点一、力和力的表示方法1.力的概念力是一种可以改变物体状态的物理量,通常用箭头表示,箭头的长度表示力的大小,箭头的方向表示力的作用方向。
2.力的单位力的单位是牛顿(N),1N是使质量为1千克的物体产生1米每平方秒的加速度的力。
3.力的表示方法通常用矢量图表示力的大小和方向,也可以用字母F表示,如F=10N。
二、力的性质1.力的效果力可以改变物体的状态,使物体运动、停止运动或改变其运动状态的方向。
2.力的合成若有多个力作用在物体上,可以通过合力和分解力的原理来理解物体的受力情况。
三、平衡条件1.平衡状态当物体受到的合力为零时,物体处于静止或匀速直线运动状态,这种状态称为平衡状态。
2.平衡条件物体处于平衡状态时,合力和合力矩均为零,可以利用平衡条件来分析物体处于平衡状态时的受力情况。
四、摩擦力及其性质1.摩擦力的概念当物体相对运动或相互接触时,会产生摩擦力,摩擦力可以使物体减速或停止运动。
2.摩擦力的性质摩擦力的大小与物体接触面的粗糙程度相关,摩擦力的方向与物体的相对运动方向相反。
五、力的作用点1.力的作用点力的作用点是力作用的具体位置,力会使物体发生变形或产生转动。
2.力臂在计算力矩时,需要考虑力的作用点与转动轴之间的距离,这个距离称为力臂。
六、静力的平衡条件1.静力平衡当物体处于静止状态时,受到的合外力和合外力矩均为零,这种状态称为静力平衡。
2.静力平衡条件利用静力平衡条件可以分析物体在静止状态时所受的外力和外力矩,进而求解静力平衡问题。
七、习题训练1.多种力的合成与分解可以通过练习多种力的合成与分解来提高对力的理解和运用能力。
2.平衡条件的应用通过练习使用平衡条件来解决力的平衡问题,提高解题技巧和分析能力。
3.摩擦力的计算通过练习摩擦力的计算问题,加深对摩擦力概念的理解和应用。
以上即为八年级物理第一章第三节的知识点,希望同学们能够认真学习并掌握这些内容,提高物理学习能力和解题能力。
汽车系统动力学 (1)
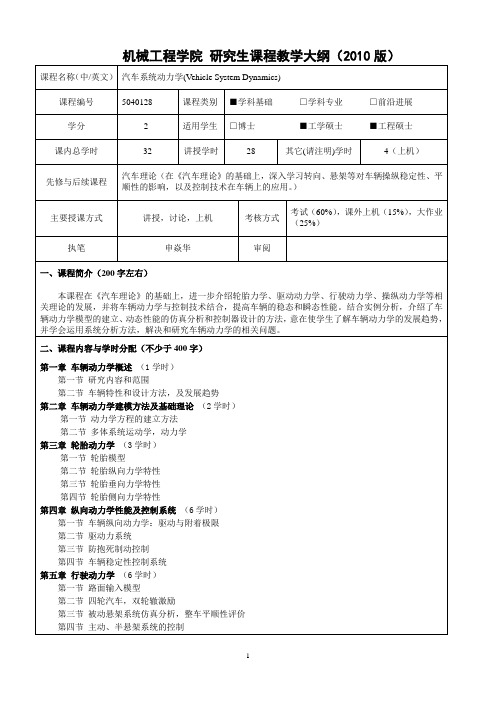
第一章车辆动力学概述(1学时)
第一节研究内容和范围
第二节车辆特性和设计方法,及发展趋势
第二章车辆动力学建模方法及基础理论(2学时)
第一节动力学方程的建立方法
第二节多体系统运动学,动力学
第三章轮胎动力学(3学时)
第一节轮胎模型
第二节轮胎纵向力学特性
第三节轮胎垂向力学特性
第二节基于matlab的车辆系统建模、仿真与控制器设计实例
第三节应用adams软件的多体动力学实例分析(课外上机)
三、教材和参考书
教材:
喻凡,林逸编著,汽车系统动力学,机械工业出版社,2005.9
Rajesh Rajamani,Vehicle Dynamics And Control,Birkhäuser, 2006
作业安排:要求学生自学几个主流的汽车动力学软件,布置几个相关的大作业(车辆动力学建模与仿真分析),加深了解相关的学习内容。
考核安排及成绩评定方法:以平时的上课出勤率,提交计算分析报告的情况,以及最后的考试为依据,进行本课程成绩的最终评定。
五、拟任课教师情况
申焱华(主讲),副教授,博士,近3年的任课情况:(本科)车辆人机工程,现代设计方法概论;(研究生)多体动力学;
参考书:
(1)Thomas D.Gillespie著,赵六奇,金达锋译,车辆动力学基础,清华大学出版社,2006.12
(2)Manfred Mitschke, Henning Wallentowitz著,陈荫三,余强译汽车动力学(第四版)清华大学出版社,2009.12
(3)Dave Crolla,喻凡著,车辆动力学及其控制,人民交通出版社,2004。1
第一节车辆扩展操纵模型的推导
流体流动
M=ρ v
2 1 有:
V=uA
q m1 q m2
1u1 A1 2 u 2 A2
液体:A1u1 A2 u 2
气体:1u1 A1 2 u 2 A2
三、管内流体的机械能衡算 1、理想流体的机械能衡算——柏努利方程 理想流体:
mgZ1
1 2
mu12
P1V
mgZ2
1 2
mu22
u 2 或Hf
2
u2
2g
ξ ——阻力系数,突然扩大,突然缩小,管出口,管入口
u取管径小处的流速
2、当量长度法:
hf
le
d
u 2 或Hf 2
le
d
u2 2g
le 当量长度
产生与局部阻力相同的沿程阻力所需的长度,叫做局部阻力当量长度。有 了各种管件的当量长度数据,就可以计算局部阻力了。
g
Hf
Z 位压头 u 2 动压头 2g
P 静压头
g
ΣHf ——单位质量流体的能量损失 J/Kg;ΣHf——压头损失 m
柏努利方程的应用,有几点注意。
1、选截面,就是选衡算范围,选边界条件,选已知条
件最多的边界。
2、选基准面,一般选位能较低的截面为基准面。 3、压强单位要统一。 4、大口截面的流速为零。 5、上游截面和下游截面要分清。应该是上游截面的三
P2V
常数
gZ1
1 2
u12
P1
gZ
2
1 2
u22
P2
常数
V m
1
第3节 带电粒子在匀强磁场中的运动
第3节 带电粒子在匀强磁场中的运动学习目标要求核心素养和关键能力1.知道带电粒子初速度方向和磁场方向垂直时,带电粒子在匀强磁场中做匀速圆周运动。
2.会应用动力学方法推导半径公式和周期公式。
3.会分析带电粒子在匀强磁场中运动的基本问题。
1.核心素养 应用动力学方法推导半径公式和周期公式。
2.关键能力画轨迹图的能力和推理能力。
一、带电粒子在匀强磁场中的运动1.洛伦兹力总是与粒子的运动方向垂直,只改变粒子速度的方向,不改变粒子速度的大小。
2.沿着与磁场垂直的方向射入磁场的带电粒子,在匀强磁场中做匀速圆周运动。
【想一想】带电粒子在匀强磁场中做圆周运动的向心力的来源是什么力? 答案 洛伦兹力提供做圆周运动的向心力。
二、带电粒子在磁场中做匀速圆周运动的半径和周期1.运动条件:不计重力的带电粒子沿着与磁场垂直的方向进入匀强磁场。
2.洛伦兹力作用:提供带电粒子做圆周运动的向心力,即q v B =m v 2r 。
3.基本公式半径:r =m vqB 。
周期:T =2πr v =2πmqB 。
【判一判】(1)带电粒子在匀强磁场中做匀速圆周运动,轨道半径跟粒子的速率成正比。
(√) (2)带电粒子在匀强磁场中做匀速圆周运动的周期与轨道半径成正比。
(×) (3)运动电荷在匀强磁场中做圆周运动的周期随速度增大而减小。
(×)探究1 带电粒子在匀强磁场中运动的基本问题■情境导入如图所示,可用洛伦兹力演示仪观察运动电子在匀强磁场中的偏转。
(1)不加磁场时,电子束的运动轨迹如何?加上磁场时,电子束的运动轨迹如何? (2)如果保持出射电子的速度不变,增大磁感应强度,轨迹圆半径如何变化?如果保持磁感应强度不变,增大出射电子的速度,圆半径如何变化? 答案 (1)一条直线 圆 (2)减小 增大 ■归纳拓展1.带电粒子在匀强磁场中做匀速圆周运动,匀速圆周运动的周期T =2πrv 。
将r =m v qB 代入可得T =2πm qB 。
第3节 牛顿运动定律
第3节牛顿运动定律一.考点透视(一)分析与展望牛顿运动三定律是动力学的基础。
正确理解惯性概念,理解力和运动的关系,并能熟练运用牛顿第二定律分析和计算问题,将为今后的热学、电磁学、原子物理学等打下坚实的基础。
本章对推理能力、综合分析能力等要求较高。
这部分内容也是历年高考试题中,用来鉴别考生能力,选拔有潜能的考生的重要内容之一。
1.《高考说明》对本章的知识要求很高,考查本章知识的题目每年均有出现。
主要考查以下几个方面:(1)在正交的方向上运用牛顿运动定律;(2)综合运用牛顿运动定律和运动学规律分析解决问题;(3)运用超重和失重的知识定量分析一些问题。
(4)要求能灵活运用隔离法或整体法求解简单连接体问题。
2.近年侧重于考查单个物体的分析和计算,对复杂的连接体问题不作要求,但对有共同加速度的简单连接体问题应予以足够的关注,因为这种情况从整体上看仍属单个物体的问题。
3.该部分试题内容具有多向性和多解性等特点。
例如,1999年上海试卷中第11题就是一例。
4.近年对该部分知识单独命题趋于减少,对弹簧和实验问题有所侧重,重在考查分析思维能力和实验处理能力。
(二)小结与整合1.牛顿第一定律(惯性定律)(1) 定律内容一切物体总保持匀速直线运动状态或静止状态,直到有外力迫使它改变这种状态为止。
(2) 定律理解①运动状态的改变是指速度的大小或(和)方向的改变。
②由定律可知:力不是维持运动的原因,而是改变运动状态(产生加速度)的原因。
(3) 惯性物体保持原来的匀速直线运动状态或静止状态的性质。
惯性大小表示改变运动状态的难易程度。
注意:①一切物体都有惯性②惯性是物体的固有属性③质量是惯性大小的量度④惯性大小与物体所处的运动状态无关2. 牛顿第二定律(1) 定律内容物体的加速度a 跟物体所受的合外力F 合成正比,跟物体的质量成反比,加速度的方向跟合外力的方向相同。
(2)表达式: F 合=ma(3)定律理解① 该定律指明力是产生加速度的原因,物体只有受了力才有加速度。
(完整版)转子动力学基础
4
两边对时间求两次导数得:
代入牛顿方程得 o点的运动微分方程
根据动量矩定理,可得圆盘绕重心c转动的微分方程:
I&& T ke(x cos y sin) 对于稳态涡动, && 0 &
2020/2/19
5
代入牛顿方程得 o点的运动微分方程
及支反力幅值F。
解:弹性轴质量: ms ( 1.52 ) / 4 57 7.8 10-3 0.7856 kg
圆盘质量: mD ( 16 2 ) / 4 2 7.8 10-3 3.137 kg
弹性轴中点刚度:
k 48EJ / l3 (48 20.58 106 1.54 ) /(573 64) 1325 .553 N / cm
不计轴质量时临界转速:
cr
60
2
k 30 12325.553103 1962.96r / min
mD
3.137
2020/2/19
13
计入弹性轴等效质量,按照振动理论,梁在中点的等效质 量为原质量的17/35,则临界转速为:
cr
60
2
k mD+ms17 / 35
30
arctan
10/2/19
/ p
/ p
8
= p
r= e
0
低转速区 圆盘重边飞出
2020/2/19
p
r? e
90
共振区
? p
re
180
高转速区
圆盘轻边飞出; 自动定心或质心转向
9
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§1-3、点的复合运动
一、相对运动、牵连运动和绝对运动
z z'
o' M x'
y'
o
y
x
O x y z 为 定参考系
O’x’y’z’为 动参考系
研究运动的点M为 动点
绝对运动(absolute motion): 动点相对定系的运动. 相对运动(relative motion): 动点相对动系的运动. 牵连运动(convected motion): 动系相对定系的运动.
求:绝对速度 绝对加速度
10
速度分析: B
加速度分析: B
vr va
u
A
ve
art aa
u
arn
ae
A
a
va ve vr
方向:
过A点切线
大小: ?
u
?
va ve tan u tan
vr ve / cos u / cos
方向:
大小:
公式在A
点法向 n
方向投影
aa ae ar
aa ae art arn
A点切向
?
a?
aa
cos
ae
sin
a
n r
aa
a tan
u2
r cos3
A点法向
vr2 / r
11
例:已知图示瞬时圆盘的角
速度 和角加速度 , 求杆
上A点的速度和加速度.
A
300
解:动点: 盘心C 动系: T形杆 定系: 地面
平移刚体的运动特性: 刚体上所有点的 •运动轨迹形状相同 •速度相同 •加速度相同
• 刚体定轴转动(rotation of rigid body about a fixed axis): 刚体(或其延展体)上至少存在两点在运动过程中不动.
速 度:v r
v h 其中h为点到转轴的距离。
ae ar
O’x’y’z’为 动参考系(平移)
动系为平移时:
va ve vr
aa ae ar
8
四、平移刚体和定轴转动刚体上点的速度和加速度
• 刚体平移(translation of rigid body): 刚体上任意一条直线在运动过程中始终与初始时的直线平行.
B0 A0
B A
定
轴 转
r ' z' M (P )
r 动
刚 x' o' y'
体
o
y
x
动点:M 动系:o’x’y’z’
定系:oxyz
瞬时重合点:P
di' i', dj' j',
dt
dt
vr x' i' y' j'z' k' ar x' i' y' j'z' k'
4
z
x'
ro'
o
x
z'
o' r' M
r y'
y
r xi yj zk
r' x'i' y' j'z'k' ro' xo'i yo' j zo'k r ro' r'
•绝对(加)速度:动点相对定系的(加)速度.
va xi yj zk
aa xi yj zk
aan aat ae ar
方向: C O OC
大小: R 2 R
?
?
ar
ae
c
x
O
aan aat
公式在 y
方向投影:
R2 sin R cos ae
方法二:
yA h R R sin
y A R cos R cos yA Rcos R sin
aa
d dt
ω r
d dt
x'i' y'
j' z' k'
α
r
ω va
x'i' y'
j'z'k'x' di' dt
y' dj' dt
z' dk' dt
α r ω (ve vr ) ar x'(ω i') y'(ω j') z'(ω k')
vP ωr aP α r ω (ω r)
va ve vr
va ω r x'i' y' j'z'k'
aa
d dt
ω r
d dt
x'i' y'
j ' z' k '
dk' k'
dt
18
vP ω r ve
aP α r ω (ω r) ae
B
o
动点:B ( O1B 杆上)
动系: OA杆
动点、动系选取 : (1) 动点、动系不能选在同一个刚体上.
(2) 相对运动轨迹简单已知(直线、圆). 27
A'
例:已知 AB=L,求小 B' 环M的速度和加速度.
M
1 2 , 300
2
vr2 vr1 v A' e2
A 1
R cos R2 sin 13
例:已知铅垂摇杆在图示瞬
时的角速度为 ,角加速度 为 ,求此瞬时水平AB杆的
角速度和角加速度。
A
R vr
AB=3R
L
r
B ve
va
解:动点: 杆上B点 动系: 半圆滑道 定系: 地面
运动分析 绝对运动: 圆周运动 相对运动: 圆周运动 牵连运动: 曲线平移
aat aan cot aet cot aen arn / sin
aa (aat )2 (aan )2
15
五、动系为定轴转动时的加速度合成定理
M ve vr
aaer O
R
轮O匀角速转动, 点M沿轮O边缘运动.
动点:M点 动系:圆盘 定系:地面
绝对运动:圆周运动 相对运动:圆周运动 牵连运动:定轴转动
运动分析 绝对运动: 圆周运动
相对运动: 直线运动
牵连运动: 直线平移
va
vr
O
ve c
R
求:牵连速度、 牵连加速度
速度分析: va ve vr
方向: OC
大小: R ? ?
va cos ve
ve R cos 300 12
方法一:加速度分析
Байду номын сангаас
A
y
h
aa ae ar
加速度:a r ( r) at h, an 2h 9
例:已知滑块在图示瞬时的速度和加速度,求此瞬 时杆上A点的速度和加速度。
B
u
a
r
A
解:动点: 杆上A点 动系: 滑块 定系: 地面
运动分析 绝对运动: 直线运动 相对运动: 圆周运动 牵连运动: 直线平移
B
B'
ve1
M
2
A 1
1. 速度分析:
解:双动系问题
(一)动点: 小环M
B
动系: AA’ 杆 定系: 地面
va ve1 vr1 v M
v o
B
r
u h x 牵连运动: 定轴转动
求:牵连速度和牵连加速度
vr va cos u cos ve va sin u sin
ve / OB usin2 / h
速度分析: va ve vr
方向:
OA 沿OA
大小: u
h ? ?
sin
21
vr u cos
24
方法一:动点:套筒 A ; 动系:摇杆O1B
25
方法二:动点:摇杆O1B 上的A ; 动系:OA杆
26
如何选取动点、动系?
A
B
o
u
M
A
cR
O
求: ωoA , αoA
A
动点:M (园心) 动系: OA杆
求:vA , aA
动点: A(AB 杆上) 动系: 轮C
o1
求: ωoA , αoA
va ve vr
7
证明:动系为平移时的加速度合成定理.
z z'
M
vo'
o'
ao'
y'
o x'
y
va vo' x' i' y' j' z' k'
aa
dva dt
dvo' dt
x'i'y'
j' z' k'
x
ao' ar
M 动点
O x y z 为定参考系
va ve vr
ve R va R vr
? aa ae ar