悬臂梁的有限元建模与变形分析
有限元分析实验报告

武汉理工大学学生实验报告书实验课程名称机械中的有限单兀分析开课学院机电工程学院指导老师姓名学生姓名学生专业班级机电研1502班20152016学年第2学期实验一方形截面悬臂梁的弯曲的应力与变形分析钢制方形悬臂梁左端固联在墙壁,另一端悬空。
工作时对梁右端施加垂直向下的30KN的载荷与60kN的载荷,分析两种集中力作用下该悬臂梁的应力与应变,其中梁的尺寸为10mmX10mmX100mm的方形梁。
1.1 方形截面悬臂梁模型建立建模环境:Desig nModeler 15.0。
定义计算类型:选择为结构分析。
定义材料属性:弹性模量为2.1Gpa,泊松比为0.3。
建立悬臂式连接环模型。
(1)绘制方形截面草图:在DesignModeler中定义XY平面为视图平面,并正视改平面,点击sketching下的矩形图标,在视图中绘制10mmX10mm的矩形。
(2)拉伸:沿着Z方向将上一步得到的矩阵拉伸100mm,即可得到梁的三维模型,建模完毕,模型如下图1.1所示。
图1.1方形截面梁模型1.2定义单元类型:选用6面体20节点186号结构单元。
网格划分:通过选定边界和整体结构,在边界单元划分数量不变的情况下,通过分别改变节点数和载荷大小,对同一结构进行分析,划分网格如下图 1.2所示:图1.2网格划分1.21定义边界条件并求解本次实验中,讲梁的左端固定,将载荷施加在右端,施以垂直向下的集中力, 集中力的大小为30kN 观察变形情况,再将力改为 50kN ,观察变形情况,给出 应力应变云图,并分析。
(1) 给左端施加固定约束;(2) 给悬臂梁右端施加垂直向下的集中力;1.22定义边界条件如图1.3所示:目上 Uau Uriah —JAMTH Uli ■叭■呵 KJi” :Ri Mt S* "krMi "H» 空 T汪!F 曲■ *** ■*hI T T K* tr ■ 0 质■衿■ £ + 4 4 ■男4L 门工"誉■軸"T声 J 「i ▲ ■囱叩F "■ — U-Hi ■jf X H > HF• ■* •_____________________________________________________________________________________________ m|T —44 "i a I i' I L a Laiav.1 Wi __.■,・图1.3定义边界条件1.23应力分布如下图1.4所示: 定义完边界条件之后进行求解。
悬臂梁分析报告
悬臂梁受力分析报告高一博2016.11.13西安理工大学机械与精密仪器工程学院摘要利用ANSYS对悬臂梁进行有限元静力学分析,得到悬臂梁的最大应力和挠度位移。
从而校验结构强度和尺寸定义,从而对结构进行最优化设计修正。
关键词:悬臂梁,变形分析,应力分析目录一.问题描述: (4)二.分析的目的和内容: (4)三.分析方案和有限元建模方法: (4)四.几何模型 (4)五.有限元模型 (4)六.计算结果: (5)七.结果合理性的讨论、分析 (8)八.结论 (8)参考文献 (8)一.问题描述:现有一悬臂梁,长500MM,一端固定,另外一端施加一个竖直向下的集中力200N。
其截面20MMX20MM的矩形,现在要分析该梁的在集中力作用下产生的位移,应力和局部应力。
二.分析的目的和内容:1.观察悬臂梁的变形情况;2.观察分析悬臂梁的应力变化;3.找出其最大变形和最大应力点,分析形成原因;三.分析方案和有限元建模方法:1.使用ANSYS-modeling-create-volumes-block建模,2.对梁进行材料定义,网格划分。
3.一端固定,另外一端施加一个向下的200N的力。
4.后处理中查看梁的应力和变形情况。
四.几何模型500X20X20的梁在在ANSYS中进行绘制.由于结构简单规则,无需简化。
五.有限元模型单元类型:solid brick8node45材料参数:弹性模量2e+11pa,泊松比0.3边界条件:一端固定,一端施加载荷载荷:F=200N划分网格后的悬臂梁模型六.计算结果:变形位移图等效应力图局部应力图七.结果合理性的讨论、分析1.位移分析:在变形位移图上,在约束端位移最小为零,受压端位移最大。
与实际结果一致。
2.应力分析:在应力图上,应力最大处在约束端,而最小的位于受压端,与变形图相对应。
通过材料力学计算可知约束端的所受弯矩最大。
两个结果印证无误。
3.局部应力分析:在局部应力图上,可以看出在固定端上表面存有较大的应力,且为拉应力,受压端直角尖处有最大应力,从形成原因上分析属于尖角处应力集中。
四节点四边形单元悬臂梁的matlab有限元编程-概述说明以及解释

四节点四边形单元悬臂梁的matlab有限元编程-概述说明以及解释1.引言1.1 概述悬臂梁是一种常见的结构形式,在工程领域中被广泛应用。
四节点四边形单元是有限元分析中常用的元素类型,能够准确地模拟悬臂梁的受力情况。
Matlab是一种强大的数学工具,可以用来编程实现有限元分析。
本文旨在介绍如何利用Matlab进行四节点四边形单元悬臂梁的有限元编程,并对其进行分析和展望。
通过本文的研究,我们希望能够为工程实践提供一定的参考和指导,同时也为进一步的研究提供基础。
1.2 文章结构本文主要分为三个部分:引言、正文和结论。
引言部分将介绍文章的背景和目的,明确文章研究的问题和意义。
正文部分包括理论基础、Matlab有限元编程介绍和四节点四边形单元悬臂梁建模三个小节。
其中,理论基础将介绍与悬臂梁有关的理论知识,Matlab有限元编程介绍将详细介绍如何使用Matlab进行有限元分析,最后,四节点四边形单元悬臂梁建模将展示具体的悬臂梁建模过程。
结论部分将对实验结果进行分析与总结,探讨本研究的意义和潜在研究方向。
1.3 目的本文旨在利用Matlab编程实现四节点四边形单元悬臂梁的有限元分析,通过建立合适的数学模型,探索悬臂梁在受力状态下的力学特性。
具体目的包括:1. 建立悬臂梁的有限元数学模型,包括节点、单元和材料参数的设置;2. 实现悬臂梁在不同受力情况下的应力、应变、位移等力学性能的计算;3. 分析悬臂梁受力情况下的应力分布情况,探讨悬臂梁的破坏模式和极限承载能力;4. 验证Matlab编程方法的有效性和准确性,为工程实际中悬臂梁等复杂结构的有限元分析提供参考和借鉴。
通过本文的研究,旨在为工程实践提供可靠的数值计算工具和理论分析方法,为解决工程结构强度和稳定性问题提供一定的指导和参考价值。
2.正文2.1 理论基础在介绍四节点四边形单元悬臂梁的Matlab有限元编程之前,我们首先需要了解一些基本的理论知识。
悬臂梁是一种常见的结构形式,在工程领域中广泛应用于桥梁、建筑物等领域。
用有限元法对悬臂梁分析的算例算例
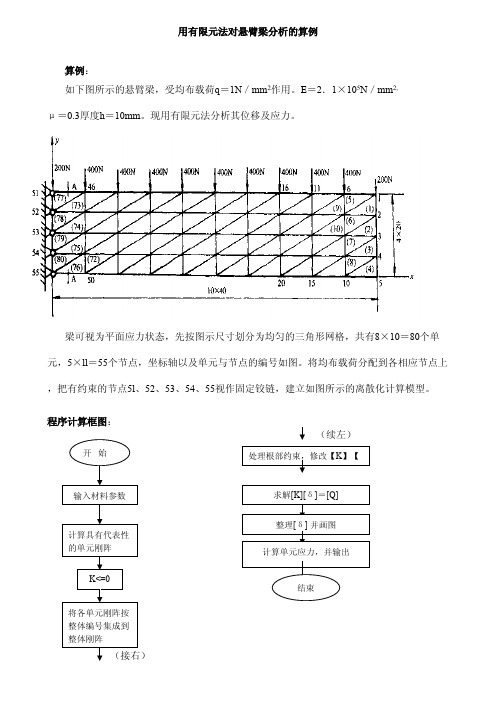
用有限元法对悬臂梁分析的算例算例:如下图所示的悬臂梁,受均布载荷q =1N /mm 2作用。
E =2.1×105N /mm 2,μ=0.3厚度h =10mm 。
现用有限元法分析其位移及应力。
梁可视为平面应力状态,先按图示尺寸划分为均匀的三角形网格,共有8×10=80个单元,5×ll =55个节点,坐标轴以及单元与节点的编号如图。
将均布载荷分配到各相应节点上,把有约束的节点5l 、52、53、54、55视作固定铰链,建立如图所示的离散化计算模型。
程序计算框图:(续左)程序中的函数功能介绍及源代码1.LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)――该函数用于计算平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi,yi)、第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)时的线性三角形元的单元刚度矩阵.该函数返回6×6的单位刚度矩阵k.2.LinearTriangleAssemble(K,k,i,j,m)――该函数将连接节点i,j,m的线性三角形元的单元刚度矩阵k集成到整体刚度矩阵K。
每集成一个单元,该函数都将返回2N×2N的整体刚度矩阵K.3.LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)-- 该函数计算在平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi, yi)第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)以及单元位移矢量为u时的单元应力。
该函数返回单元应力矢量。
函数源代码:function y = LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;%三角形单元面积,单元节点应该按逆时针排序,保证每个三角形单元的面积都为正值(也可作为一个小函数:LinearTriangleElementArea)betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);%B为应变矩阵,其中betai=yi-ym,betaj=ym-yi,betam=yi-yj.gammai=xm-xj, gammaj=xi-xm, gammam=xj-xi.D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%D为弹性矩阵,分为平面应力问题和平面应变问题对于平面应力问题D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];对于平面应变问题E1=E/(1-NU*NU),NU1=NU/(1-NU)y = t*A*B'*D*B;%单元刚度矩阵function y = LinearTriangleAssemble(K,k,i,j,m)K(2*i-1,2*i-1) = K(2*i-1,2*i-1) + k(1,1); K(2*i-1,2*i) = K(2*i-1,2*i) + k(1,2);K(2*i-1,2*j-1) = K(2*i-1,2*j-1) + k(1,3); K(2*i-1,2*j) = K(2*i-1,2*j) + k(1,4);K(2*i-1,2*m-1) = K(2*i-1,2*m-1) + k(1,5); K(2*i-1,2*m) = K(2*i-1,2*m) + k(1,6);K(2*i,2*i-1) = K(2*i,2*i-1) + k(2,1); K(2*i,2*i) = K(2*i,2*i) + k(2,2);K(2*i,2*j-1) = K(2*i,2*j-1) + k(2,3); K(2*i,2*j) = K(2*i,2*j) + k(2,4);K(2*i,2*m-1) = K(2*i,2*m-1) + k(2,5); K(2*i,2*m) = K(2*i,2*m) + k(2,6);K(2*j-1,2*i-1) = K(2*j-1,2*i-1) + k(3,1); K(2*j-1,2*i) = K(2*j-1,2*i) + k(3,2);K(2*j-1,2*j-1) = K(2*j-1,2*j-1) + k(3,3); K(2*j-1,2*j) = K(2*j-1,2*j) + k(3,4);K(2*j-1,2*m-1) = K(2*j-1,2*m-1) + k(3,5); K(2*j-1,2*m) = K(2*j-1,2*m) + k(3,6);K(2*j,2*i-1) = K(2*j,2*i-1) + k(4,1); K(2*j,2*i) = K(2*j,2*i) + k(4,2);K(2*j,2*j-1) = K(2*j,2*j-1) + k(4,3); K(2*j,2*j) = K(2*j,2*j) + k(4,4);K(2*j,2*m-1) = K(2*j,2*m-1) + k(4,5); K(2*j,2*m) = K(2*j,2*m) + k(4,6);K(2*m-1,2*i-1) = K(2*m-1,2*i-1) + k(5,1); K(2*m-1,2*i) = K(2*m-1,2*i) + k(5,2);K(2*m-1,2*j-1) = K(2*m-1,2*j-1) + k(5,3); K(2*m-1,2*j) = K(2*m-1,2*j) + k(5,4);K(2*m-1,2*m-1) = K(2*m-1,2*m-1) + k(5,5); K(2*m-1,2*m) = K(2*m-1,2*m) + k(5,6);K(2*m,2*i-1) = K(2*m,2*i-1) + k(6,1); K(2*m,2*i) = K(2*m,2*i) + k(6,2);K(2*m,2*j-1) = K(2*m,2*j-1) + k(6,3); K(2*m,2*j) = K(2*m,2*j) + k(6,4);K(2*m,2*m-1) = K(2*m,2*m-1) + k(6,5); K(2*m,2*m) = K(2*m,2*m) + k(6,6);K;%对号入座,如前所述,每集成一次都将返回2N×2N的整体刚度矩阵K.此题为110×110 function y = LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%平面应力和平面应变问题两种情况y = D*B*u;%单元应力计算主程序源代码E=21e7;NU=0.3;t=0.01;stifflike5=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.08,0.36,0.06,1) %选取2个基本单元,调用M文件stifflike1=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.06,0.4,0.06,1) K=sparse(110,110); %creat a xishu matrix for total stiff创建一个稀疏矩阵for i=1:49if rem(i,5)%模取余,bool型变量,非零即为真j=i;K=LinearTriangleAssemble(K,stifflike5,j,j+5,j+6);%节点编号K=LinearTriangleAssemble(K,stifflike1,j,j+6,j+1);endend%将每个单元刚度矩阵集成到总刚中K=full(K);%转化稀疏矩阵 k=K(1:100,1:100);k=[K,zeros(100,10);zeros(10,100),eye(10)];k=sparse(k);%利用边界条件简化基本方程Q=sparse(2:10:92,1,[-200,-400,-400,-400,-400,-400,-400,-400,-400,-400,],110,1);%外部荷载,此处不包括约束条件,通过形函数确定,是不是可以理解为梁的两端为中间的一半呢?d=k\Q;%高斯消元法,比克莱姆法则在计算速度上有绝对的优势!x=0:0.04:0.4;plot(x,d(106:-10:6))%基本绘图命令grid%带网格y=zeros(80,3);q=0;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.06;xn=0.4;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];xl=0.4;yl=0.06;xm=0.36;ym=0.04;xn=0.4;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.02;xn=0.4;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0;xn=0.4;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endendq=4;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.08;xn=0.36;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.06;xm=0.36;ym=0.06;xn=0.36;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.04;xn=0.36;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0.02;xn=0.36;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endend %y(i+q,:)这是实现什么的?没见过这种用法,算法上应该就是通过节点位移实现指定单元的内力,这部分本人看的也晕晕的,望高人指点N=y(73:80,1)结果图及数据输出悬臂梁轴线挠度图:一单元的单元刚阵1.0e+006 *0.8077 0 0 -0.4038 -0.8077 0.40380 2.3077 -0.3462 0 0.3462 -2.30770 -0.3462 0.5769 0 -0.5769 0.3462-0.4038 0 0 0.2019 0.4038 -0.2019-0.8077 0.3462 -0.5769 0.4038 1.3846 -0.75000.4038 -2.3077 0.3462 -0.2019 -0.7500 2.5096五单元的单元刚阵1.0e+006 *00.050.10.150.20.250.30.350.4x/m w /m0.5769 0 -0.5769 0.3462 0 -0.34620 0.2019 0.4038 -0.2019 -0.4038 0-0.5769 0.4038 1.3846 -0.7500 -0.8077 0.34620.3462 -0.2019 -0.7500 2.5096 0.4038 -2.30770 -0.4038 -0.8077 0.4038 0.8077 0-0.3462 0 0.3462 -2.3077 0 2.3077根部73-80各单元应力计算结果如下(n/m2):1.0e+007 *2.1119 -0.0621 -2.2816 -4.8824 5.0479 2.4065 0.0352 -2.3753。
悬臂梁变形及应力分析

基于ANSYS 10.0对悬臂梁的强度及变形分析姓名:***班级:机制0803班学号:************对悬臂梁的受力及变形分析摘要:本研究分析在ANSYS10.0平台上,采用有限元法对悬臂梁进行强度与变形分析、验证此悬臂梁设计的合理性。
一、问题描述长度L=254 mm的方形截面的铝合金锥形杆,上端固定,下端作用有均布拉力P=68.9 Mpa,上截面的尺寸50.8×50.8 mm,下截面尺寸25.4×25.4 mm(见右图),弹性模量E=7.071×104 Mpa,泊松比μ=0.3,试用确定下端最大轴向位移δ和最大轴向应力。
试将分析结果与理论解进行比较,说明有限元分析的误差。
(理论解:最大轴向位移δ=0.1238 mm)。
二、建立有限元模型:定义模型单元类型为:solid(实体)95号单元,材料常数为:弹性模量E=7.071×104 Mpa,泊松比μ=0.3。
三、有限元模型图:建立有限元模型时,观察模型的形状可知,我们可以先建立模型的上下底面,再根据有上下底面形成的八个关键点(keypoints)生成线,接着生成面,生成体。
最后生成该悬臂梁的模型图,示图如下:整个模型建立好之后即可对其划分网格,划分网格时,若选择自由划分则生成的网格比较混乱,不能比较准确的模拟该梁真实的受力变形情况。
故我们选择智能划分模式,并且分别对模型的各个棱边(lines)进行均匀分割,这样可以划分出比较理想的网格,更利于我们的研究和分析。
网格划分之后的模型图为:四、加载并求解:根据该悬臂梁的受力特点,我们在其下底面(比较大的底面)上进行六个自由度的位移约束,而在其上地面上施加大小为P=68.9 Mpa均布拉力,将载荷加载好之后便可进行运算求解,求解完成之后,我们得到其位移变形图如下:Z向位移云图为:Z向应力云图为:五、结果分析及结论:由以上两张云图和一张变形图中我们可以读出,悬臂梁的最大轴向(Z向)位移和轴向(Z向)最大应力分别为:最大轴向位移为:δ=0.123746 mm 最大轴向应力为:σ=68.224 Mpa 但是,我们知道,如果所划分的网格有差异时,计算结果将会产生一定的误差,由于设计要求的最大轴向位移不能超过0.1238mm,而我们的建模计算结果已经小于此设计要求值。
压电悬臂梁发电装置的建模与仿真分析
压电悬臂梁发电装置的建模与仿真分析一、本文概述随着能源危机和环境问题的日益突出,绿色、可再生的能源技术成为了全球研究的热点。
其中,压电发电技术作为一种新型的无源能量收集方式,因其能够将环境中的机械能转化为电能,受到了广泛关注。
压电悬臂梁作为压电发电装置的核心部分,其发电性能直接影响到整个装置的能量转换效率。
因此,对压电悬臂梁发电装置的建模与仿真分析,不仅有助于深入理解其发电机制,而且可以为装置的优化设计提供理论依据。
本文旨在探讨压电悬臂梁发电装置的建模与仿真分析方法。
我们将对压电悬臂梁的基本工作原理进行概述,包括压电效应的基本原理和压电悬臂梁的工作机制。
我们将详细介绍压电悬臂梁发电装置的建模过程,包括力学模型、电学模型以及机电耦合模型的建立。
在此基础上,我们将利用仿真软件对模型进行仿真分析,研究不同参数对压电悬臂梁发电性能的影响。
我们将总结分析结果,提出优化压电悬臂梁发电装置的建议和展望未来的研究方向。
通过本文的研究,我们期望能够为压电发电技术的发展提供有益的理论支持和实践指导,推动其在能源收集领域的广泛应用。
二、压电悬臂梁发电装置理论基础压电悬臂梁发电装置的核心理论基础主要源于压电效应。
压电效应,即某些晶体在受到机械力作用时,其内部正负电荷中心会发生相对位移,从而在晶体表面产生电势差的现象。
这种效应允许机械能直接转化为电能,为悬臂梁发电装置提供了理论基础。
在压电悬臂梁发电装置中,悬臂梁作为主要的能量转换元件,当受到外部激励(如风、振动等)作用时,梁体会发生形变,进而产生压电效应。
此时,悬臂梁的表面会产生电荷分布,形成电势差,从而输出电能。
为了深入理解和优化压电悬臂梁发电装置的性能,需要对其进行数学建模。
常见的建模方法包括集中参数模型和分布参数模型。
集中参数模型主要关注悬臂梁的整体动态特性和压电效应,适用于低频、大振幅的情况。
而分布参数模型则考虑悬臂梁的详细结构和振动模态,适用于高频、小振幅的情况。
基于有限元软件ANSYS分析简单悬臂梁的模型
2.2有 限元 网格 处理 速度 的提升
Cntrls—}ManualSize_ Lines—}AU Lines
有 限元分 析 过程 主要 包含 了三 个 步骤 :对 分 析对 象进 行 离 ANSYS Ma in Menu: Preprocessor _+ Meshing-+MeshrI l
2018.26科 学技 术创新 一123一
基 于有 限元软 件 ANSYS分析 简单悬臂 梁 的模 型
郭安 江 (安徽理工大学 土木建筑学院,安徽 淮南 232001)
摘 要:作为 目前世界上发展最快的计算机辅助工程(cAE)工具 ,NSYS软件的接 口可 以与大多数计算机辅助 工程(cAE)工具
关键 词 :ANSYS软件 ;有 限元 ;线 性 ;悬臂 梁
中 图 分 类 号 :TU375.1
文 献 标 识 码 :A
文章 编号 :2096-4390(2018)26-0123—02
1 ANSYS软 件简 介
于应用线性理论来解决破坏 、裂纹扩展等问题 ,还需要解决材料
为了验证某机械结构系统是否满足安全性等设计需求 ,我 的塑形和蠕变效应 ,此时必须求解材料的非线性问题 ,例如对塑
连接。计算机辅助设计软件相对应 ,为数据的共享和交流提供 了便利 ,例如 Creo,NASTRAN,I-DEAS,AutoCAD等软件 。ANSYS
软件 。包含 了多种有限元分析软件的功能 ,从 简单的线性静 力分析到非常复杂的非线性动 力分析 ,再到电磁 分析、流体分析 、热分
析等。在每一个不同的工程领域 ,ANSYS软件分析方法有所差别 ,步骤也不一样。本文主要分析简单悬臂梁的有限元模型。
散化 处理 、有 限元求 解 、对计 算 结果 进行 后处 理 。过 去 由于计 算 Mesh:lines
工程力学中的悬臂梁受力和弯曲变形问题的分析与计算方法总结

工程力学中的悬臂梁受力和弯曲变形问题的分析与计算方法总结悬臂梁是工程力学中常见的结构,其受力和弯曲变形问题一直是研究的焦点。
本文将对悬臂梁受力和弯曲变形问题的分析与计算方法进行总结。
一、悬臂梁的受力分析在工程实践中,悬臂梁常常承受着外部力的作用,因此对其受力进行准确的分析至关重要。
悬臂梁的受力分析主要包括弯矩和剪力的计算。
1. 弯矩的计算悬臂梁在受力时会产生弯矩,弯矩的计算可以通过弯矩方程进行。
弯矩方程是基于力的平衡原理和材料的本构关系推导出来的,通过对悬臂梁上各点的力平衡和材料的应力-应变关系进行分析,可以得到弯矩的表达式。
2. 剪力的计算悬臂梁在受力时还会产生剪力,剪力的计算同样可以通过力的平衡原理和材料的本构关系进行推导。
剪力方程可以通过对悬臂梁上各点的力平衡和材料的剪切应力-剪切应变关系进行分析得到。
二、悬臂梁的弯曲变形分析除了受力分析外,悬臂梁的弯曲变形也是需要考虑的重要问题。
弯曲变形是指悬臂梁在受力作用下产生的弯曲形变,主要表现为悬臂梁的中性面发生偏移和悬臂梁上各点的位移。
1. 弯曲形变的计算弯曲形变的计算可以通过弯曲方程进行。
弯曲方程是基于力的平衡原理和材料的本构关系推导出来的,通过对悬臂梁上各点的力平衡和材料的应力-应变关系进行分析,可以得到弯曲形变的表达式。
2. 中性面的偏移和位移的计算中性面的偏移和位移是悬臂梁弯曲变形的重要表现形式。
中性面的偏移可以通过弯曲方程和几何关系进行计算,位移可以通过位移方程进行计算。
通过这些计算,可以得到悬臂梁上各点的位移和中性面的偏移情况。
三、悬臂梁的计算方法总结为了更准确地分析和计算悬臂梁的受力和弯曲变形问题,工程力学中提出了一系列计算方法。
常见的计算方法包括静力学方法、力学性能方法和有限元方法等。
1. 静力学方法静力学方法是最常用的计算方法之一,它基于力的平衡原理和材料的本构关系进行分析和计算。
通过对悬臂梁上各点的力平衡和材料的应力-应变关系进行分析,可以得到悬臂梁的受力和弯曲变形情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬臂梁的有限元建模与变形分析
摘要:应用有限元软件对矩形截面的悬臂梁受均匀载荷时采用三种不同的模型进
行分析,并且比较其有限元结果与理论结果,从而得之有限元分析需要进行合理的分析,建立合适的模型,才可以得到正确的结果。
关键词:建模,有限元
1计算分析模型如图1-1所示,左边完全约束,右边不约束。
图1-1梁的计算分析模型梁截面分别采用以下三种截面(单位:m):
Name; Profile-1
Shape; Rectangular
图1-2矩形截面Cancel
1 a
Name: Profiled
Shape: Circular
shape;]
图1-4圆形截面
Cancel
Name; Profile-3
图1-3圆形截面
+
2
b
-*
1
b
Cancel
2理论计算模型
取右端研究
5e4
3有限元计算结果
图1-5矩形截面变形位移图
qx
.0e5 cy
ax
200000
0.05 2.67 e8Pa 50000
400000
12 El 3 El 带入
2, y = 0得 m ax
8.5e - 3m
0.3 6
u
3 33T-333 3 333 -u oo oo.d c T-IT - T-lF ■
:57 912^ 6 8-q I ^680357^1^® 4 Is 630 7 4「二口
6 1.2-2 £ 4 5 IT 二
b 77 R-
图1-6矩形截面应力图
U U2 +O.OOOeWO -7.4<>Cie*04 -1.4S0e-03 -2.220e-03 -2.960&-03 -3,700e-03
-4.440e-03 -5.180e-03 -5.920e-03 -6.660e'03 -7.400&-03 -S.140&-03 -8.S80e-03
ODB: Job-222.odb Abaqus/Standard 6.10-1 Tue Apr 10 16:53:04 GIVfT+08:0D 2012
;何亡卵亡兀 L S MS TH MS *
103]
675e+07 ;■
saie+oa 517e+0S [A%>g 75%)
比叮币 Li? ft Comer
工 Mv&es
4
实
M
j L> 3
+ i + 1
+ 1. * t
11 t - *ۥ I
图1-7 2D四边形单元变形位移图
Sj
raises
SNEGj (fraction ■ -1.0) (Avg; 75%)
+2..222e+08 4h2s 037e+08 +1 u852e+08 + 1.667e+08
+ 1.4S2e+08 + 1.297e+08 + l.U2e+08 +9.265e+07 +7B ,i
llSe+O7 +5.564e+07 +3.713fi+07 + 1.862e+07 + 1,124e+05
O£4: LD 1 I K A V XI GHT^OEztD SU£
图1-8四边形单元应力图
+0.000e+00 -6.538e-04 -1.30Se-03 -1.961e-03 ~2.615e-03 -3.269e-03 -3.923e-03 -4.577e-03 -5.231e-03 -5.2S4e-03 -6.538e-03 -7,192e-03 -7.846S-05
ODD : Job-533.odb Abaqus/Standard 6.10-1 Tue Apr 10 15:55:43 GMT+08:00 201;
Is%
-吗
图1-9 2D三角形单元变形位移图
图1-9 2D三角形单元应力图
图1-10 3D单元应力图
图1-11 3D单元变形位移图图
、结论
由上面可以看出理论计算值与1D和2D计算结果基本吻合,而与三维结果差异巨大。