红外避障传感器测试结果
红外避障传感器简介

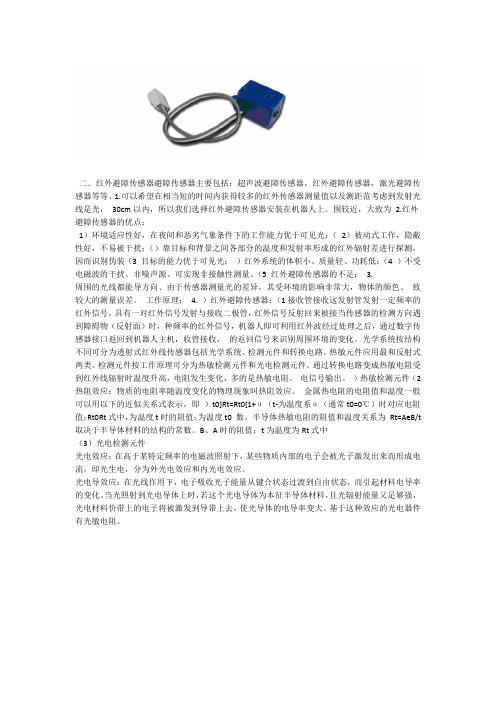
红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹实图:技术指标:主体外形尺寸:23×15.3×15.1mm(长×宽×高)重量:7g额定电压:直流电源5.0V检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差)调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0”状态指示方式:检测到信号指示灯亮红灯,无信号不亮安装方式:单颗Ø3螺丝安装线长:17.4cm±0.2cm(有效距离)连接方式:单条3芯排线,2510型3脚插头有效角度:30 左右原理与功能红外避障传感器(以下简称红外)。
红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接应用介绍:红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用红外避障传感器在很多项目中都有使用。
在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫;在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。
注意事项:1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。
障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。
2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。
红外避障传感器
二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。
围较近,大致为 2.红外避障传感器的优点:1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。
(5 红外避障传感器的不足: 3.周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。
工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。
光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。
热敏元件应用最和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。
电信号输出。
)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。
金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。
半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。
B、A时的阻值;t为温度为Rt式中(3)光电检测元件光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。
红外避障传感器

红外避障传感器/距离可调3-80cm 简介:
这是一种集发射与接收于一体的光电传感器。
检测距离可以根据要求进行调节。
该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。
原理:
前方无障碍输出高电平(1),有障碍输出口(黄色)电平会从高电平变成低电平(0),工作原理已经标在图上了。
背面图有一个电位器可以调节障碍的检测距离。
在电路设计中可以再输出端黄线加上拉电阻10K 到5V,再接入单片机检测,会比较稳定,单片机检测可以采用外部硬件中断INT0 INT1等来实现。
电气特性:
U:5VDC
I:100mA
Sn:3-80CM
尺寸:
直径:17MM
传感器长度:45MM
引线长度:45CM。
红外避障传感器使用说明

红外避障传感器使用说明书型号WT_IROA 本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压为5V,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm。
引脚说明及调试方式如下图:调节频率调节距离使能跳线帽1 2 3 45VGND OUT EN调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V,GND,OUT,EN。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
12。
玩具避障小车实验报告.

(1)模拟电子技术
(2)数字电子
(3)谭浩强,《c语言设计》
(4)苏丽萍,《电子技术基础》
图3总体硬件电路图
3.2 驱动电路
小车电机装有减速齿轮组,考虑不需调速功能,采用市面易购的电机驱动芯片L293D,该芯片是利用TTL电平进行控制,对电机的操作方便,通过改变芯片控制端的输入电平,即可以对电机进行正反转操作,很方便单片机的操作,亦能满足直流减速电机的要求。
智能小车驱动电路实现如图所示。
(2)在确保电路没有问题的时候,小车还是不能行走。
解决方法:检查元器件好坏,在排除元器件问题后,检查程序问题。
(3)在红外避障功能中,小车不能按程序设计一样走,当遇到障碍物时不是先后退在左转而是直接停止。
解决方法:检查电路连接有没有问题,当排除电路连接问题后,检查程序问题,确保程序没有问题时,我们想到可能是接受管的接收参数问题,所以我们在接受管1、2管脚加上一个滤波电路。
利用2位LED显示秒值,实现秒表计时显示。以2个按键KE1、KE2、分别实现启动、停止等功能。用中断的编程使用定时器,定时器工作在定时方式,实现1秒定时,每50ms溢出中断一次,中断20次后就到1秒钟;秒表计时显示用动态显示方式实现,通过键盘扫描方式取得KE1、KE2的键值,用键盘的中断处理程序实现秒表的启动、停止等功能。
6实验心得
经过一学期的努力,我们的红外避障小车项目如期完成,并取得预期的成果。作为该项目的参与者,我们都有各自的分工协作。
回首这个项目的制作,我们都得益匪浅。最初开始制作小车的前半部分对我们来说并不困难,因为其中涉及到的电路图我们也能看懂,焊接我们在之前的专业学课也学习过。但越到后期制作就越困难重重。首先是程序的编写问题,程序总是不稳定,达不到预期的功能效果。后来在添加红外避障功能的时候更是屡屡出现问题,例如,发射管不亮,发射管亮了,但是接收管又出现不能很好接收信号,数码管显示不完整,蜂鸣器不响等问题。但是经过我们组成员的努力和坚持,才将问题一一排除,成功解决。
红外避障小车实验
红外避障小车实验报告一、实验简介在本实验中,我们在“创意之星”模块化学习套件所提供的机械构件基础上,组装出四轮驱动式小车结构。
利用机器人的控制器和系统程序,通过多传感器融合技术结合逻辑判断算法对智能小车的运行状态进行实时调控,最终实现自主探路、判断及选择正确的行进路线功能,完成自主躲避障碍物的任务。
二、实验目的(1)掌握基本构型和传感器的安装方法,并能搭建出能完成一定功能的机器人,利用创意之星组件,进行避障小车的组装,调试,利用红外传感器进行路障感应,完成避障功能。
(2)会用控制器联机调试舵机工作状态,会查询各种传感器的数据。
(3)通过 NorthStar 的流程图功能,实现简单的逻辑控制(4)能通过编程实现智能小车自主躲避障碍物的功能(5)对避障小车的避障原理有充分的理解,掌握其避障的方法,能够对实验过程中出现的问题进行解决,发现问题,解决问题。
三、实验器材计算机( 1 台);标准版控制器( 1 个);红外接近传感器( 2 个);红外测距传感器( 1 个);直流电源( 1 个);充电器( 1 个);数字舵机( 4 个);多功能调试器( 1 个);轮子( 4 个);螺丝刀( 1 个); KD ( 4 个); L3-1 ( 4 个); U3H ( 5 个);I7 ( 1 个);螺丝和垫片(若干)四、实验原理利用红外传感器,其优点是对近距离的障碍物反应速度灵敏,不同方位的传感器之间信号不会相互干扰,最终选择红外传感器作为小车的眼睛,进行避障。
由于本次实验小车轮子没有实现转弯功能,所以通过设定左右两组轮子的不同前进速度来实现转弯功能。
当向右转时,左侧轮子的速度要比右侧轮子的前进速度快,反之实现左转功能,此设计需小心谨慎,防止出现轮子不同步,无法实现转弯功能。
五、实验内容( 1 )搭建智能小车,掌握基本构型的组装方法,主要包括舵机和轮子的连接、传感器的安装以及舵机和传感器的接线( 2 )通过编程控制智能小车的前进、后退、变速以及转向( 3 )将控制策略的流程图用真正的程序语言实现,并下载到控制器上,实现智能小车自主躲避障碍物的功能六、程序设计1.程序流程图当前方没有障碍物的的时候车就一直直走。
红外避障传感器原理

红外避障传感器原理
红外避障传感器是一种常用的传感器,它可以通过检测红外线来感知障碍物的
存在,从而实现避障的功能。
其原理主要基于红外线的发射和接收。
首先,红外避障传感器内部包含红外发射器和红外接收器。
红外发射器会不断
地发射红外线,而红外接收器则会接收这些红外线。
当没有障碍物时,红外线会直线传播并被接收器接收;而当有障碍物挡住红外线时,接收器就无法接收到红外线。
这时,传感器就会发出信号,从而实现避障的功能。
其次,红外避障传感器的工作原理是基于红外线的特性。
红外线是一种电磁波,它的波长比可见光长,人眼无法看到。
而红外避障传感器就是利用了这一点。
当有障碍物挡住红外线时,传感器就会感知到障碍物的存在,从而及时采取相应的措施,比如停止前进或改变方向,以避免碰撞。
此外,红外避障传感器还可以通过测量红外线的反射来判断障碍物的距离。
当
红外线照射到障碍物表面时,会发生反射,传感器可以通过测量反射的强度来判断障碍物的距离远近。
这样,机器人或其他设备就可以根据这些信息来调整自己的运动轨迹,实现避障的目的。
总的来说,红外避障传感器的原理是基于红外线的发射和接收,通过检测红外
线的存在与否以及反射强度来感知障碍物的存在和距离,从而实现避障的功能。
它在机器人、智能家居等领域有着广泛的应用,是一种非常重要的传感器。
希望本文能对大家对红外避障传感器的原理有所了解。
智能避障小车试验报告与总结
智能避障小车试验报告与总结专业班级:12自动化-3******学号:**********随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。
视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。
视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。
但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
STC12C5A60S2/AD/PWM系列单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。
内部集成MAX810专用复位电路,2路PWM,8路速10位A/D转换(250K/S),针对电机控制,强干扰场合。
我们采用的就是STC12C5A60S2这种单片机。
避障系统可以采用反射式光电开关或者超声波传感器对前方的障碍物进行检测,前者结构简单,应用方便灵活,但不能获知障碍物与小车间的具体距离;后者结构复杂,但可以测得障碍物与小车间的直线距离。
本系统采用反射式光电开关E3F-DS10C4来检测障碍物。
E3F-DS10C4是漫反射式光电开关,NPN三线输出方式,三线分别为电源线、输出线、地线。
它的灵敏度也可以调节,检测距离比较远,可以达到20cm。
红外发射管,发射50hz调制的38k信号。
当遇到障碍物时,发生漫反射,红外接收头接收到这一信号时,输出端输出50hz的信号。
判断这一信号,即可判断,遇到了障碍物。
避障传感器基本原理,利用物体的反射性质。
在一定范围内,如果没有障碍物,发射出去红外线,因为传播距离越远而逐渐减弱,最后消失,或者反射回来的光很弱时,输出端呈低电平光电开关的检测不受外界干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外避障传感器测试结果
一、传感器原理
传感器主动发射红外线,根据反射光探测,类似雷达,如果探测到障碍,传感器的OUT 脚输出0,否则1。
二、测试目的
测试传感器的各项性能是否满项目的测量要求。
此传感器在项目设计中是用于测量纸卷厚度的,当纸卷剩余不多的时候需要传感器预报,因此对精度要求小于2mm 。
三、测试内容及方法
1)传感器精度测试
测试中传感器测量距离保持不变,移动被测物体(障碍物),由近及远,直到传感器输出的电平发生变化(由0变到1),停止移动,测量此时被测物体与传感器的距离,重复多次;移动被测物体由远及近,直到传感器输出的电平发生变化(由1变到0),停止移动,测量此时被测物体与传感器的距离,重复多次。
2)回滞性测试
传感器距离设定不变,由于精度等原因,传感器测得的距离是在一定范围变化的,因此具有回滞特性。
表1是根据以上所述的测试方法测得的结果。
图1是根据表1绘制的回滞特性曲线。
表1 测试结果
四、测试总结
从表1的数据可以看出,传感器在设定距离不变的情况下,由近及远的误差电平 图1 红外避障传感器的回滞曲线 mm
为3.28mm,由远及近的误差为4.18mm,在设定距离总的误差为6.06mm。
因此不符合我们的要求。
同时在测试中发现,传感器在测定距离的电平是动态变化的。
理想情况下,障碍物由近及远,传感器输出的电平应该是由0变到1,障碍物由远及近,传感器输出的电平由1变到0。
但是在实际测试中,障碍物移动到传感器电平发生变化的距离后,电平还是在变化,而且不规律。
波形如图2所示。
这是不符合我们要求的。
图2 示波器测得的传感器电平变化
五、测试结论
传感器不符合项目要求。