红外避障传感器使用说明
Mini红外避障传感器用户手册v2.0

-8-
RobotBase
奥松机器人
void loop() {
int r,m,l; r=digitalRead(IRR); m=digitalRead(IRM); l=digitalRead(IRL); if(l==HIGH &&m==HIGH && r==HIGH) advance(120); if(l==LOW &&m==LOW && r==LOW ) {
上。
3、调节距离电位器:用于调整传感器探测的距离。当用户需要调整探测距离时,
用螺丝刀调整电位器阻值,按箭头方向旋转是将探测距离减小,相反方向旋转探测距
离增大。
4、频率调节电位器:用于产生 38KHz 频率的方波。正常情况下,在出厂前将阻
值调好,无需用户调节。但由于外界环境的不同或振动,出现了接收不到反射信号的
文,(/s/blog_5e4725590100i20b.html)这是实验代码的博文地址。
Arduino 实验代码如下。
int pinI1=8;//定义 I1 接口 int pinI2=9;//定义 I2 接口 int speedpin=11;//定义 EA(PWM 调速)接口 int pinI3=6;//定义 I3 接口 int pinI4=7;//定义 I4 接口 int speedpin1=10;//定义 EB(PWM 调速)接口 int IRR=3;//定义右侧避障传感器接口 int IRM=4;//定义中间避障传感器接口 int IRL=5;//定义左侧避障传感器接口 void setup() {
红外避障传感器简介

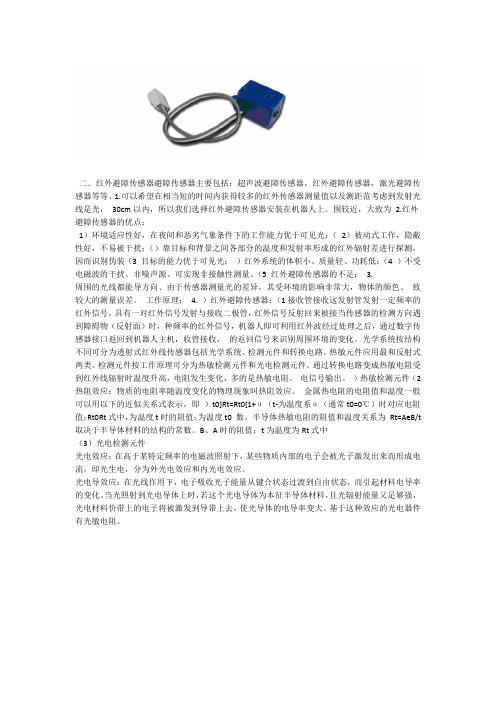
红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹实图:技术指标:主体外形尺寸:23×15.3×15.1mm(长×宽×高)重量:7g额定电压:直流电源5.0V检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差)调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0”状态指示方式:检测到信号指示灯亮红灯,无信号不亮安装方式:单颗Ø3螺丝安装线长:17.4cm±0.2cm(有效距离)连接方式:单条3芯排线,2510型3脚插头有效角度:30 左右原理与功能红外避障传感器(以下简称红外)。
红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接应用介绍:红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用红外避障传感器在很多项目中都有使用。
在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫;在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。
注意事项:1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。
障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。
2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。
红外避障传感器
二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。
1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。
围较近,大致为 2.红外避障传感器的优点:1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。
(5 红外避障传感器的不足: 3.周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。
工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。
光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。
热敏元件应用最和反射式两类。
检测元件按工作原理可分为热敏检测元件和光电检测元件。
通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。
电信号输出。
)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。
金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。
半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。
B、A时的阻值;t为温度为Rt式中(3)光电检测元件光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。
昂首阔步——红外传感器和机器人的避障行走课件
步骤7:将机器人的初始转角设置为45°, 并将机器人置于其前方的障碍墙附近,如图 所示,视察显示屏的检测输出结果。
视察红外检测结果,在表中填写红外检测 值。
2、机器人避障 若要使得机器人在一个模拟的房间中行走时不碰 到周围的障碍,可以使用红外传感器不断地获取周围 环境的障碍信息,并根据获得的信息按照一定的策略 采取相应的动作。
昂首阔步——红外传感器 和机器人的避障行走
任务导航
人类的视觉系统是眼睛,而能力风暴机器人 的视觉系统分为两部分,一部分是亮度传感器: 另一部分是红外传感器。
本课,机器人将通过红外传感器获取障碍信 息并对信息进行条件判断,然后根据判断的结果 做出相应的避障动作。
1、机器人的红外检测
能力风暴机器XXX以通过红外传感器获取前方 的障碍信息,并能够根据对障碍信息的判断躲开 障碍。在机器人的左前方和右前方分别有一只红 外发射传感器。
试着在如图0所示的场地中完成机器人“避障寻火” 项目。
提示,可以结合本课与第6课所学的知识完成 此项目。图1给出了解决本问题的程序流程。
谢谢
步骤3:在仿真环境中加载红外检测场地环 境并在场地中设置障碍,如图所示。
步骤4:将机器人置于场地中,然后调试 使其能躲开障碍物机器人。
知识着陆
1、红外传感器像机器人的眼睛,机器人通过 红外传感器获取外界的障碍信息,并通过程序处理 这些信息从而实现躲开障碍或跟踪障碍等动作。
2、红外传感器函数的代码和功能: 格式:ir_detector()功能:检测红外 传感器接收到的检测值。能力风暴机器XXX以 获得的4种障碍信息的检测值,如表所示。
如图所示,在这两只红外发射传感器的中间有 一只红外接收传感器。当红外发射传感器发射出的 红外信号被前方的障碍物挡住时,就会有信号返回 并被红外接收传感器接收,表示机器人的前面有障 碍;如果红外接收传感器没有接收到信号,表示机 器人的前面没有障碍。
红外传感器的使用方法

红外传感器的使用方法红外传感器可是个超有趣又实用的小玩意儿呢!咱先来说说红外传感器是啥。
简单讲,它就像一个小眼睛,能感觉到红外线。
红外线是啥?就是那种我们看不见,但是它就在周围存在的光线啦。
那怎么开始用它呢?一般来说,你得先给它找个合适的地方安家。
比如说,如果你想用它来做个小安防装置,像检测有没有人偷偷进你的小房间,那就把它安装在门口或者窗户旁边。
要注意哦,这个地方得平稳,可不能让它老是晃悠,不然它会晕头转向,就不好好工作啦。
安装好之后呢,就是连接啦。
这就像给它接上小辫子,让它能跟其他设备说话。
如果是连接到简单的小电路上,那得按照说明书上的指示,小心地把线接对。
要是接错了,它可能就会闹小脾气,不工作或者乱工作呢。
接下来就是设置啦。
很多红外传感器都能调整灵敏度的。
这就好比你调整小宠物的敏感度一样。
如果灵敏度调得太高,可能一只小苍蝇飞过它都会大惊小怪;要是调得太低呢,可能有人在它面前跳舞它都没反应。
所以要根据实际的需求来调整哦。
比如说,你只是想检测大一点的东西,像人或者大宠物,那就不用调得太灵敏。
在使用过程中,也要注意保持它的清洁呢。
就像你要经常给小宠物洗澡一样。
如果它的感应部分脏脏的,上面落了好多灰尘,那它的小眼睛就被遮住啦,可能就不能很好地感觉到红外线了。
还有哦,如果它和其他设备一起工作,像和小警报器连在一起。
你得时不时地检查一下它们之间的配合是不是还那么默契。
有时候设备用久了,可能就会出现小故障,就像两个人相处久了偶尔也会闹别扭一样。
红外传感器其实不难用啦,只要你像对待小宠物一样细心又耐心地对待它,它就能很好地为你工作,帮你实现好多有趣的小想法,比如做个自动感应小夜灯之类的,是不是超酷呢?。
红外线传感器使用方法
红外线传感器使用方法嘿,朋友们!今天咱就来唠唠红外线传感器这玩意儿的使用方法。
你说这红外线传感器啊,就像是我们的小侦探,能帮我们感知到好多我们肉眼看不到的东西呢!它能探测到物体发出的红外线,这可神奇啦!比如说,你想在晚上知道有没有人偷偷靠近你的家门,红外线传感器就能派上大用场啦!把它安装在合适的位置,它就会像个警惕的小卫士一样,时刻帮你留意着周围的动静。
那怎么用它呢?首先啊,你得选个好地方安装它。
就像你把宝贝藏在一个安全又容易发现情况的角落一样。
可别随随便便找个地儿就装上了,那可不行!得考虑到它能不能探测到关键的区域。
然后呢,要给它接上电,让它有足够的能量工作呀。
这就好比人得吃饱饭才有劲儿干活,对吧?它没了电可就啥都干不了啦。
安装好了,接好电了,这时候你就得好好调试一下啦。
就像你新买了个电视,得调调频道啥的,让它能最准确地感知到红外线。
你可别嫌麻烦,这可是很重要的一步哦!要是没调好,它可能会误报或者干脆不工作呢。
你想想看,要是大半夜的它突然乱叫,把你吓得够呛,结果啥事儿都没有,那多尴尬呀!或者该报警的时候它没反应,那不是糟糕啦?在使用的过程中,你还得时不时地检查检查它,看看它是不是还好好地工作着呢。
就像你得时不时关心关心你的好朋友一样,看看它有没有啥问题。
要是它出了问题,你可得赶紧修好它呀!不然等你真正需要它的时候,它却掉链子,那可就悲剧啦!红外线传感器在好多地方都能大显身手呢!比如在一些自动门那里,它能感应到有人靠近就自动打开门,多方便呀!还有在一些智能家居系统里,它能让你的家变得更智能,更舒适。
总之呢,红外线传感器这玩意儿真的挺好用的,只要你用对了方法,它就能给你带来很多便利和安全呢!咱可别小看了它,好好利用它,让它为我们的生活增添一份保障吧!怎么样,是不是觉得挺有意思的?赶紧去试试吧!。
红外避障原理
红外避障原理一、引言红外避障技术是一种常见的传感技术,可用于机器人、智能家居等领域。
它利用红外线传感器来检测前方是否有障碍物,并通过控制电路使机器人或设备避开障碍物。
本文将介绍红外避障技术的原理及其应用。
二、红外线传感器1. 红外线概述红外线是指波长在0.75-1000微米之间的电磁波,与可见光波长相比较长,无法被肉眼直接观察到。
在工业和科学领域中,常使用红外线来检测物体的温度、识别物体等。
2. 红外线传感器原理红外线传感器是一种可以检测周围环境中是否存在物体的设备。
它通过发射出一定频率的红外光束,当这些光束照射到物体表面时,会被反射回来。
传感器接收到这些反射光束后,会将其转换为电信号,并通过处理电路进行分析和处理。
3. 红外线传感器分类根据不同的工作原理和应用场景,红外线传感器可以分为以下几类:(1)红外接近传感器:用于检测物体与传感器之间的距离,一般应用于机器人、智能家居等场景中。
(2)红外避障传感器:用于检测前方是否有障碍物,以实现避障功能。
(3)红外温度传感器:用于检测物体的温度,广泛应用于工业领域中。
三、红外避障原理1. 红外避障技术概述红外避障技术是一种利用红外线传感器来检测前方是否有障碍物,并通过控制电路使机器人或设备避开障碍物的技术。
它主要由发射模块和接收模块组成,发射模块发射出一定频率的红外光束,当这些光束照射到前方时,如果有物体挡住了光束,则会反射回来并被接收模块接收到。
接收模块将接收到的信号转换为电信号,并通过处理电路进行分析和处理。
根据处理结果,控制电路会对机器人或设备进行相应的控制,实现避开障碍物的功能。
2. 红外避障技术原理红外避障技术主要依靠红外线传感器来实现。
当发射模块发射出一定频率的红外光束时,如果没有物体挡住,则光束会一直向前传播,直到被接收模块接收到。
但是,如果有物体挡住了光束,则光束会被反射回来,并被接收模块接收到。
接收模块将接收到的信号转换为电信号,并通过处理电路进行分析和处理。
红外避障传感器使用说明

红外避障传感器使用说明书型号WT_IROA 本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压为5V,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm。
引脚说明及调试方式如下图:调节频率调节距离使能跳线帽1 2 3 45VGND OUT EN调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V,GND,OUT,EN。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
12。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外避障传感器使用说明书
型号WT_IROA 本红外避障传感器,只有使用说明,没有设计的原理图。
本红外避障传感器,可以检测到前方3-35CM 范围的障碍物。
额定工作电压
为5V,电路板上设计有电源工作指示灯。
当检测到障碍物时,输出低电平。
电路板尺寸:22.8mm*26.4mm。
引脚说明及调试方式如下图:
调节频率调节距离
使能跳线帽
1 2 3 4
5VGND OUT EN
调节频率电位器,可以调节发射管的发射红外线的频率,红外解码一般采用38KHZ 的脉冲,如果多只红外避障传感器一起使用时,也可以利这个电位器,调节不同的发射频率以减少传感器之间相互干扰。
出厂时,已经调节好。
调节距离电位器,用于调节发射的功率,向右旋转发射功率变大,反之变小。
发射功率越大,检测的距离越远,但如果太大,可能会引起接收头一直接收到红外的脉冲,会造成红外避障检测失败,注意适量调节,使用者可以在红外发射中套上黑色的热缩管,以减少红外光线泄露,同时可以使用红外光线有一定的方向性。
至于热缩管的长度,使用者可以自行试验以获得最佳的效果。
引脚说明,从左到右分别为:5V,GND,OUT,EN。
其中OUT 为传感器的输出引脚,当前方有障碍物时,输出低电平,同时电路板上也有对应LED 变亮。
EN 引脚为控制传感器的使能引脚,低电平有效。
同时为了方便三线制的传感器,本电路板上设计了一个可以直接跳线使能的。
使用跳线帽即可。
经过本让的测试,本传感器,工作在4.5V-5.5V 下,工作都可以常地检测到
障碍物。
使用时,注意电源的极性不要接反,否则会损坏芯片。
请欣赏此传感器,在智能小车上的应用图。
1
2。