小波分析第3章
《数字图像处理》习题参考答案
《数字图像处理》习题参考答案第1 章概述连续图像和数字图像如何相互转换答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
#采用数字图像处理有何优点答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1.具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2.数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3.数字图像处理技术适用面宽。
4.数字图像处理技术综合性强。
数字图像处理主要包括哪些研究内容答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的图像。
]讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
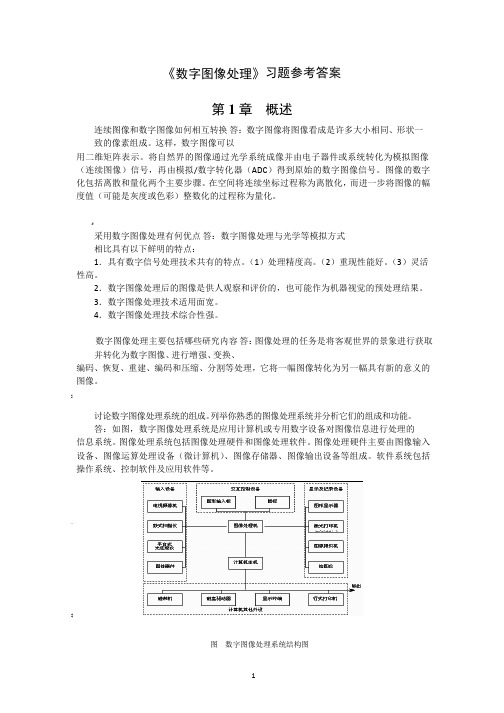
答:如图,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机)、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
$图数字图像处理系统结构图1常见的数字图像处理开发工具有哪些各有什么特点答.目前图像处理系统开发的主流工具为Visual C++(面向对象可视化集成工具)和MATLAB 的图像处理工具箱(Image Processing Tool box)。
两种开发工具各有所长且有相互间的软件接口。
Microsoft 公司的VC++是一种具有高度综合性能的面向对象可视化集成工具,用它开发出来的Win 32 程序有着运行速度快、可移植能力强等优点。
小波变换在图像处理中的应用毕业论文
结论.......................................................................15
参考文献...................................................................16
cl是x的小波分解结构则perf0100小波分解系数里值为0的系数个数全部小波分解系数个数perfl2100cxc向量的范数c向量的范数华侨大学厦门工学院毕业设计论文首先对图像进行2层小波分解并通过ddencmp函数获取全局阈值对阈值进行处理而后用wdencmp函数压缩处理对所有的高频系数进行同样的阈值量化处理最后显示压缩后的图像并与原始图像比较同时在显示相关的压缩参数
3.2.2实现增强的算法流程............................................10
3.3小波包图像去噪......................................................10
3.3.1实现去噪的主要函数............................................11
指导教师签名:
日期:
华侨大学厦门工学院毕业设计(论文)
小波变换在图像处理中的应用
摘要
近年来小波变换技术已广泛地应用于图像处理中。小波分析的基本理论包括小波包分析、连续小波变换、离散小波变换。小波变换是一种新的多分辨分析的方法,具有多分辨率和时频局部化的特性,
可以同时进行时域和频域分析。
因此不但能对图像提供较精确的时域定位,也能提供较精确的频域定
小波变换学习心得
小波变换学习心得第一章什么是小波变换1从傅里叶变换到小波变换1.1短时傅里叶变换为了克制傅里叶变换中时域和频域不能兼容的缺点,短时傅里叶变换把一个时间信号变为时间和频率的二维函数,它能够提供信号在某个时间段和某个频率X围的一定信息。
这些信息的精度依赖于时间窗的大小。
短时傅里叶变换的缺点是对所有的频率成分,所取的时间窗大小一样,然而,对很多信号为了获得更准确的时间或频率信息,需要可变的时间窗。
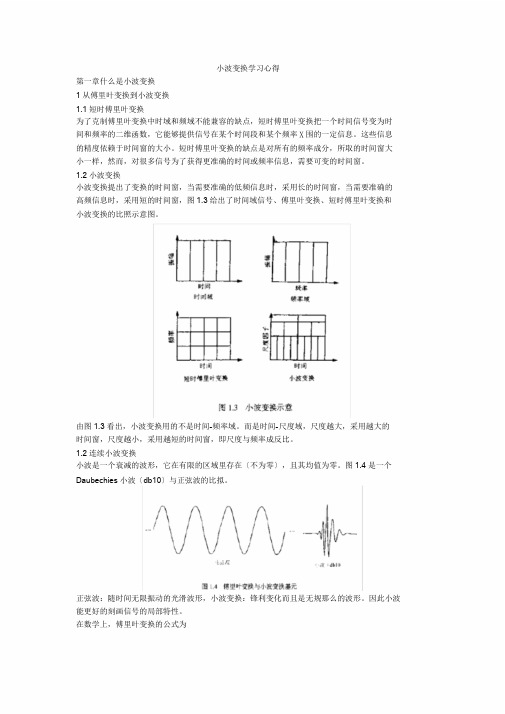
1.2小波变换小波变换提出了变换的时间窗,当需要准确的低频信息时,采用长的时间窗,当需要准确的高频信息时,采用短的时间窗,图1.3给出了时间域信号、傅里叶变换、短时傅里叶变换和小波变换的比照示意图。
由图1.3看出,小波变换用的不是时间-频率域。
而是时间-尺度域,尺度越大,采用越大的时间窗,尺度越小,采用越短的时间窗,即尺度与频率成反比。
1.2连续小波变换小波是一个衰减的波形,它在有限的区域里存在〔不为零〕,且其均值为零。
图1.4是一个Daubechies小波〔db10〕与正弦波的比拟。
正弦波:随时间无限振动的光滑波形,小波变换:锋利变化而且是无规那么的波形。
因此小波能更好的刻画信号的局部特性。
在数学上,傅里叶变换的公式为jtFftedt连续小波变换〔ContinueWaveletTransform〕的数学表达式CWTfttdta,ba,b1t bat a2a, b式中,t为小波;a为尺度因子;b为平移参数。
图1.6是小波变换的示意图。
由图看出,小波变换给出了在各个时刻信号是由哪些尺度的小波构成。
小波中的尺度因子的作用是将小波在保持完全相似条件下“拉伸〞或者“压缩〞,图1.7给吃了尺度因子的“拉伸〞和“压缩〞作用。
小波中的平移参数,是简单地将波形沿时间轴平移。
连续小波变换CWT a,b是参数a和b的函数。
下面的五个步骤是获得CWT a,b的最简单方法。
第一步,选择尺度a一定的小波,把它与原始信号的开场一段进展比拟。
第三章连续小波变换和离散小波变换解读
R (t t0 )2 | (t) |2dt
= [ ]
1 || ˆ || 2
R ( 0 )2 |ˆ () |2d
1 2
则 a,b (t) 的窗口中心为 ta,b=at0+b,宽度为 ta,b=a t,ˆa,b () 的
窗口中心为
a,b=
1 a
0
,宽度为 a,b
1 da
f(t)= C 0 a2 WT f (a,b) a,b (t)db
小波分析中的尺度参数的倒数类似于地图上的比例尺。 我国的地形图比例尺有八种(即八种基本比例尺):1:5000 ,1:10000,1:25000,1:50000,1:100000,1:250000 ,1:500000,1:1000000。其中比例尺大于 1:10000 的 是大比例尺(一般小于 1:500),比例尺在 1:25000 和 1:100000 之间的是中比例尺,比例尺小于 1:250000 的 是小比例尺(一般小于 1:100 万)。
则 称 ψ 为 一 个 基 本 小 波 或 小 波 母 函 数 (mother
wavelet)。以上条件称为允许性条件,常数 C 称为允许
性常数。
小波这个词中的“小”指的是该函数是有限宽度的,它 们在时域都具有紧支集或近似紧支集。原则上,任何满足允 许性条件的函数都可以作为小波母函数,但实际上常选取时 域具有紧支集或近似紧支集(具有时域局部性)的具有正则 性(具有频域局部性)的函数作为小波母函数,以使小波母 函数在时—频两域都有较好的局部性。“波”指的是该函数 是振荡的,图像具有正负交替的波动性。因为
=
1 a
。
注:作为一种数学变换,伸缩变换用于膨胀或紧缩一个信号 。大尺度因子对应于信号的膨胀,而小尺度因子对应于信号 的紧缩。
基于MATLAB的小波分析应用(第二版)(周伟)1-4章 (2)
说明 获取在消噪或压缩过程中的默认阈值 去噪的阈值选择 获取一维或二维小波去噪阈值 使用 Birgé-Massart 算法获取一维小波变换的阈值 使用 Birgé-Massart 算法获取二维小波变换的阈值 使用小波进行一维信号的自动消噪 用小波进行消噪或压缩 产生含噪声的小波测试数据 估计一维小波系数的噪声 小波包去噪的阈值选择 用小波包变换进行信号的压缩或去噪 小波包分解系数的阈值处理 一维信号小波系数的阈值处理 二维信号小波系数的阈值处理 软阈值或硬阈值处理 阈值设置管理
说明 尺度对应频率 尺度函数 二维尺度函数 小波管理 小波滤波器组 最大小波分解尺度
第2章 MATLAB小波工具箱简介 3. 小波函数 MATLAB小波工具箱提供的小波变换函数如表2-3所示,它 们主要用于产生一些基本的小波函数及其相应的滤波器。
第2章 MATLAB小波工具箱简介
表2-3 小波变换函数
第2章 MATLAB小波工具箱简介 表2-6 二维离散小波变换函数
函数名 appcoef2 detcoef2
dwt2 dwtmode
idwt2 upcoef2
说明 提取二维小波分解的低频系数 提取二维小波分解的高频系数 单尺度二维离散小波变换 离散小波变换的延拓模式 单尺度二维离散小波逆变换 二维小波分解系数的直接重构
第2章 MATLAB小波工具箱简介
表2-15 树 管 理 函 数
函数名
说明
函数名
说明
allnodes 计算树结点
noleaves 列举非终结点
函数名 laurpoly ls2filt
lsinfo lwt lwt2
lwtcoef lwtcoef2 wave2lp wavenames
说明 构造 Laurent 多项式 将提升方案转化为滤波器组 关于提升方案的信息 一维提升小波变换 二维提升小波变换 一维提升小波变换系数的提取或重构 二维提升小波变换系数的提取或重构 将 Laurent 多项式与小波关联 能够应用于提升小波变换的小波名称
小波分析完美教程经典
(征求意见稿) 清华大学计算机科学与技术系 智能技术与系统国家重点实验室
林福宗,2001-9-25
小波是近十几年才发展起来并迅速应用到图像处理和语音分析等众多领域的一种数学 工具,是继 110 多年前的傅立叶(Joseph Fourier)分析之后的一个重大突破,无论是对古老的 自然学科还是对新兴的高新技术应用学科都产生了强烈冲击。
图 3-05 离散小波变换分析图 执行离散小波变换的有效方法是使用滤波器。该方法是 Mallat 在 1988 年开发的,叫做 Mallat 算法[1],这种方法实际上是一种信号的分解方法,在数字信号处理中称为双通道子带 编码。 用滤波器执行离散小波变换的概念如图 3-06 所示。图中,S 表示原始的输入信号,通 过两个互补的滤波器产生 A 和 D 两个信号,A 表示信号的近似值(approximations),D 表示 信号的细节值(detail)。在许多应用中,信号的低频部分是最重要的,而高频部分起一个“添 加剂”的作用。犹如声音那样,把高频分量去掉之后,听起来声音确实是变了,但还能够听
3.1.3 小波分析
信号分析一般是为了获得时间和频率域之间的相互关系。傅立叶变换提供了有关频率域 的信息,但时间方面的局部化信息却基本丢失。与傅立叶变换不同,小波变换通过平移母小 波(mother wavelet)可获得信号的时间信息,而通过缩放小波的宽度(或者叫做尺度)可获得信 号的频率特性。对母小波的缩放和平移操作是为了计算小波的系数,这些系数代表小波和局 部信号之间的相互关系。本节将介绍小波分析中常用的三个基本概念:连续小波变换、离散 小波变换和小波重构。
S=A1 + AAD3 + DAD3 + DD2。
6
第三章连续小波变换和离散小波变换.
ˆ a,b () 的 则 a,b (t ) 的窗口中心为 ta,b=at0+b, 宽度为 ta,b=a t,
1 a , b 0 ,宽度为 窗口中心为 a,b= =a 。
1 a
注:作为一种数学变换,伸缩变换用于膨胀或紧缩一个信号 。大尺度因子对应于信号的膨胀,而小尺度因子对应于信号 的紧缩。 在数学上, 设 f(t)是一个给定函数, 则当 s>1 时, f(st) 表示 f(t)的一个紧缩,当 s<1 时,则表示 f(t)的膨胀。 在小波变换中,当尺度因子 a>1 时基函数被膨胀,当 a<1 时基函数被紧缩。
然后在尺度因子 a=1 处的小波向右移动 τ 个单位到 b=τ 处,在 a=1,b=τ 处计算 CWT,这相当于得到了时 间—尺度平面上对应于点 a=1,b=τ 的变换值。 重复上述过程, 直到到达信号的结束。 这时对应于尺 度因子 a=1 的时间—尺度平面上的一行点计算完毕。 然后 a 的值增加一点点。本来这是一个连续变换, 因此 b 和 a 的值应该连续增加。但如果用计算机来计算 小波变换的话,则 b 和 a 都必须以小步长增加。这就相 当于对时间—尺度因子相平面进行采样。
a,b (t ) 为依赖于参数
a,b 的小波基函数。由于 a,b 是连续取
值,故称对应的小波基函数族{ a,b (t ) }为连续小波基函数。
记小波母函数ψ(t)的窗口半径为 t,中心为 t0,它的 Fourier 变换ˆ ( ) 的窗口半径为 ,中心为 0,则 t0= || ||
3.2 连续小波变换的计算
设 f(t)是一个信号,我们选好了一个母小波函数 。 一旦选好了母小波,则从 a=1 开始计算 CWT。一般 而言,由于所研究的实用信号是带限的,因此只需要计算 对应于有限区间内的尺度的 CWT。 为方便起见,计算从 a=1 开始,a 将不断增大。即计 算将从高频算到低频。 a 的第一个值对应最紧缩的小波。 当 a 的值增大时,小波将逐渐膨胀。
001第1讲小波分析与傅里叶变换201104

dt
从频率至时间 (逆变换)
it F ( ) e d
短时傅立叶变换实现信号局部分析
WFT ( , )
f (t ) g * (t )e i 2t dt
小波分析的基本理论 短时傅里叶变换(STFT )
1 傅 里 叶 变 换 到 小 波 分 析
S ( , ) f (t ) g (t )e
令 Wb, t eit wt b,则短时FT为
Parseval 恒等式
1 ˆ ˆ ~ (Gb f ) f t Wb, t dt f ,Wb, f ,Wb, 2
ˆ 都是窗函数,其确定 可以证明 Wb, 和 W b , 的矩形窗口为
窗函数的举例
Gaussian 函数
1
短时Fourier变换
ˆ 都是窗函数, 若wt , w 则短时Fourier变换定义为
~ (Gb f )
f t eit wt bdt
短时Fourier变换也叫窗口Fourier变换 短时FT是说明时频局部化分析思想的很好例子
实际中信号分析的要求:
信号高频部分对应时域中的快变成分,如 陡峭的前沿、后沿、尖脉冲等,分析时对 时域分辨率要求高,对频域分辨率要求低。 信号低频成分对应时域中的慢变成分,分 析对时域分辨率要求低,对频域分辨率要 求高。
因此,短时Fourier变换不能敏感地反映 信号的突变,不能很好地刻画信息。
信号时频分析的重要性:
时间和频率是描述信号的两个最重 要的物理量。 信号的时域和频域之间具有紧密的 联系。
Fourier变换(FT):
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V j ⊂ L2 ( R ), j ∈Z ,(为了表示方便,最小的空间记为 0,最大的空间记为∞)
1.单调性(逐级包含) : V j ⊂ V j+1 , 2.二进制伸缩相关性: f ( x ) ∈ V j ⇔ f (2 x ) ∈ V j+1 , f ( x / 2) ∈ V j−1 , 3.平移不变性: f ( x ) ∈ V j ⇔ f ( x − k ) ∈ V j , 4.逼近性: U V j = L2 ( R ) , { V j }j →∞ = L2 ( R) 且 I V j = { 0} , 即从整个平方可积函
k j
{
}
(2.4.9)
(2) g k 的和 将(2.4.9)式两边同时积分,并同除以尺度函数 ϕ 的积分,可看到:
∑g
k
k
=0
(3) 频域关系式 小波函数的傅立叶变换为
ˆ ˆ ψ (ω ) = g (ω / 2)ϕ (ω / 2) ,
g 是一周期为 2π 的函数 g (ω ) = ∑ g k e − jω k ,
k
(2.4.10) (2.4.11 )
(4)
递推关系
因为 ϕ ˆ ( 0) = ∫ ϕ (t ) dt =1 ,将(2.4.10)式反复迭代,可推出下式: ˆ ψ (ω ) = g (ω / 2)∏ h( 2 − j ω ) ,
j= 2 ∞
(5) 频域初值
ˆ 在(2.4.10)式中令 ω = 0 ,ψ (0) = ∫ ψ (t ) dt = 0
k 2
2
ˆ ϕ (ω + πk ) +
任取 A≤B,有下式成立:
2 2 ≤ ∑ α j ϕ j ≤ B ∑ α j . A α ∑ j j j j 上式说明了 { α j }与 f 的逼近程度。当 { ϕ j }∈ V0 是规范正交基时,上式的等号成立。
1/ 2
1/ 2
Vj+1 Vj Vj-1
∫
∞ −∞
ϕ ( x) dx = 1.
(2.4.3)
在很多时候,并不能得到尺度函数 ϕ 的解析表达式,但我们有快速算法可以得到
ϕ 在二进点( x = 2 − j k ; j , k ∈ Z )的值。在很多应用领域,我们感兴趣的并不是尺
度函数 ϕ 本身,而只是系数 hk 。 (3) 频域关系式 对双尺度方程(2.4.1)做傅立叶变换
D0 f ( x ) = ∑ d k( 0)ψ 0 k d k( 0) = D0 f ,ψ 0k = f ,ψ 0 k
上式实际上就是离散小波变换 WT f ,这样就把多分辨分析和小波变换联系起来 了。 D0 f ( x) 称为 f ( x ) 在 V0 中的细节信息,也就是两极逼近间的细节差异。 Q V1 = V0 ⊕ W 0 ∴ P1 f = P0 f + D0 f ∴ D0 f = P1 f − P0 f
2 k
(2.5.2)
将ϕ ˆ (ω ) = h(ω / 2)ϕ ˆ (ω / 2) (2.4.6)式代入,有(令 ω = ω / 2 ) :
∑ h(ω + πk )
k
2
ˆ ϕ (ω + πk ) = 1;
2
将上述和式分为偶数和奇数两部分,并考虑 h 以 2π 为周期,可进一步得出:
k∈偶数
∑ h(ω )
{
}
j , k ∈ Z 为 V j 的规范正交基。
同样可得到 f ( x ) 在 V j 中的平滑逼近,也就是 f ( x ) 在分辨率 j 下的概貌。 每一空间 Vj 代表了多尺度分析的一个层次, 其相对于另一个相邻空间是粗糙 的或是精细的。 通过合适地定义向这些空间的投影, 可给出函数在空间 Vj 的近似。
定理 1:设闭子空间序列 V j ⊂ L2 ( R ), j ∈Z ,是 L2 ( R) 的一个多分辨分析,从 g 可构 造出函数 ϕ ( x) ∈ V0 ,使得 { ϕ ( x − k )}构成 V0 的规范正交基:
1/2 1 2 −1 ˆ ˆ ϕ ( x) = F ∑ g (ω + 2mπ ) g (ω ) 2π m∈Z 说明:如果由分解得到的 g ( x ) → {g ( x − k )} 是规范正交的,则令 ϕ = g ;如果不
3.1.3 尺度函数与小波函数的一些重要性质
(i.) 尺度函数
(1) 二尺度差分方程 设 ϕ ∈V0 ∈V1 ,故存在一序列 {h' k }∈ l 2 ,使尺度方程满足
ϕ ( x) = 2 ∑ h 'k ϕ ( 2 x − k ) = 2∑ hk ϕ ( 2 x − k )
k k
(2.4.1)
hk =
由于 {ϕ ( x − l )| l ∈Z } 构成了 V0 的一组单位正交基,那么 ϕ j , l | l ∈ Z 也构成了 Vj 的 单位正交基。
{
}
3.2.1
Poisson 公式
Poisson 公式是正交归一性质在频域上的表现。 (1) 设 f (t − k ), k ∈ z 是一组正交归一的函数集合
t
1 1 ϕ ( x / 2) = ϕ ( x ) + ϕ ( x − 1) = 2 ϕ ( x ) + ϕ ( x − 1) 2 2
(2) h k 的和 将(2.4.1)式两边同时积分,并同除以尺度函数 ϕ 的积分,可看到:
∑h
k
k
=1
(2.4.2)
在一般条件下,尺度函数由其双尺度差分方程和下面的归一化方程唯一确 定,
ˆ ˆ ϕ (ω ) = ∑ hk e − jωk / 2ϕ (ω / 2)
k
,
(2.4.6)
ˆ = h (ω / 2)ϕ (ω / 2)
h 是一周期为 2π 的函数 h (ω ) = ∑ hk e − jω k ,
k
(2.4.7)
(4) 递推关系 因为 ϕ ˆ ( 0) = ∫ ϕ (t ) dt =1 ,将(2.4.6)式反复迭代,可推出下式: ˆ ϕ (ω ) = ∏ h( 2 − j ω ) ,
g ( 0) = 0.
3.2 正交小波基
上节中当 W j 为 Vj 在 V j+ 1 中的正交补空间时, 多尺度分析就成为一正交多尺度 分析。
多尺度分析为正交的一个充分条件为 W0⊥ V0 , 或 ψ ,ϕ (⋅ − l ) = 0, l ∈ Z , 其它条件通过变换尺度可简单推得。 若 {ϕ ( x − l )| l ∈Z } 是一组单位正交基,则称 ϕ 为正交尺度函数, ϕ 满足 ϕ ,ϕ ( ⋅ − l ) = δ l , l ∈ Z . (2.5.1)
j
如果函数 ψ 的整数平移集合 { ψ ( x − k ) | k ∈ Z }是空间 W0 的 Riesz 基,则函数 ψ 被 称为一小波函数。进而函数集合 { ψ
ϕ j ,k 相似) 。
j, k
| k , j ∈ Z }是 L2 ( R) 的 Riesz 基( ψ j ,k 定义同
W0 中的任何函数可表示成 { ψ ( x − k )}的线性组合。
↓2
高频部分 细节信号 低频部分 平滑概貌
↓2
x(n) V0
H1 (ω)
↓2
W1 :π/2~π H1 (ω) ↓2 W2 :π/4~π/2
H0 (ω)
↓2 V1 :0~π/2 0 V3 π/8 π/4 W2 H0 (ω) π/2 W1 ↓2 π V2 :0~π/4
W3
V2 V1 V0
这种子空间剖分过程可以记为:
V0 = W1 ⊕ V1 ,V1 = W 2 ⊕ V2 ,L , V j −1 = W j ⊕ V j
子空间具有以下特点: 逐级包含: V0 ⊃ V1 ⊃ V2 , L 逐级替换: V0 = W1 ⊕ V1 = W1 ⊕ W2 ⊕ V2 = W1 ⊕ W2 ⊕ L ⊕ W j ⊕ V j
3.1.2 多分辨(多尺度)分析的概念
第三章
3.1 多分辨分析
多分辨分析
在前一章,我们从连续小波引入了离散小波。现在从多分辨分析的角度对小 波进行分析。
3.1.1 由理想滤波器组引入
为了便于理解,我们先从理想滤波器组引入多分辨分析的概念。
|X(ω)|
-π
π
ω
|H0 (ω)|
|H1 (ω)|
ω -π/2 π/2 -π π ω
x(n)
H1 (ω) π/2~π H0 (ω) 0~π/2
2 h' k 2
该方程一般称为二尺度差分方程。 二尺度差分方程存在于任意两相邻的分辨级 V j ∈ V j +1 : ϕ j 0 (2 j x) = 2∑ hk ϕ ( 2 j+1 x − k )
k
h k 与 j 的具体值无关,无论对哪两个相邻级其值都相同。
举例:ϕ ( x ) 是宽度=1,高度=1 的方脉冲。 ∫ ϕ ( x )dx = 1 ,且 ϕ ( x − k ), k ∈ z 不重叠, 构成一组规范正交基。 ϕ ( x / 2) 与 ϕ ( x ) 之间有下面的关系:
是规范正交的,则由上式得到 ϕ ( x) ∈ V0 ,称 ϕ 为一尺度函数。 在上述基础上,对各子空间的结构作进一步说明: (1) V0 中的任何函数可表示成 { ϕ ( x − k )}的线性组合。
P0 f ( x) = ∑ f k( 0)ϕ 0 k
P0 f ( x ) 称为 f ( x ) 在 V0 中的平滑逼近,也就是 f ( x ) 在分辨率 j = 0 下的概貌。 (2) 定理 2:设闭子空间序列 V j ⊂ L2 ( R ), j ∈Z ,是 L2 ( R) 的一个多分辨分析, 则 ϕ j ,k = 2 j / 2 ϕ ( 2 j x − k ) ,