轮系习题课
第六章 轮系计算题专项训练(附答案)
第六章轮系计算题专项训练(附答案)1、已知齿数和转速,求蜗轮的转速和各轮的回转方向。
齿数和转速的关系可以用传动比公式i=n1/n4来表示,因此先求出传动比i,再用i和n1求出n4.i的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=220.7.然后代入i 和n1=800r/min,求得n4=3.62r/min。
回转方向可以根据齿轮的齿数和传动方式(直接传动或倒置传动)来确定。
2、已知各轮的齿数,求传动比i。
传动比的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.3、已知各轮的齿数和蜗杆的参数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=17.4、已知各轮的齿数和主动轴的转速,求齿轮5的转速和方向。
先用传动比公式i=n1/n5求得i=200,再用i和n1=500r/min求得n5=2.5r/min。
齿轮5的方向可以根据箭头来确定。
5、已知各轮的齿数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.6、已知各轮的齿数和主动轴的转速,求传动比i和齿轮5的转动方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=40.齿轮5的方向可以根据箭头来确定。
7、已知各轮的齿数和蜗杆的参数,求传动比i和轮6的转速和方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=4.轮6的转速可以用传动比公式i=n1/n6求得,代入n1=1200r/min和i=4计算得到n6=300r/min。
轮6的方向可以根据蜗杆的旋转方向和箭头来确定。
机械原理-轮系集合例题

第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
汽车机械基础模块二六单元轮系习题及答案

知识巩固一、填空题1.由一系列相互啮合的齿轮所组成的传动系统称为也系。
2.三星齿轮机构或滑移齿轮机构常用增、减惰轮的方法实现变电的要求。
3.根据轮系中各轮轴线在空间的相对位置是否固定,轮系可分为定轴轮系和周转轮系两类。
4.加惰轮的轮系只能改变_________ 的旋转方向,不能改变轮系的. o二、选择题1.当两轴相距较远,且要求传动准确,应采用A.带传动B.链传动C.蜗杆传动D.齿轮系传动2. 传动比恒定。
A.皮带传动B.链传动C.齿轮传动D.螺旋传动3.轮系中的惰轮常用于改变—oA.轮系的传动比大小B.从动轮的转向C.传动距离D.结构形式三、判断题1.轮系中加惰轮会改变总传动比的大小();又会改变从动轮的旋转方向。
()。
2.轮系和摩擦轮传动一样易于实现无级变速。
()3.至少有一个齿轮的几何轴线绕另一个齿轮旋转的轮系称为定轴轮系。
()4.定轴轮系传动比,等于该轮系的所有从动齿轮齿数连乘积与所有主动齿轮齿数连乘积之比。
()5.轮系可以实现变速和变向要求。
()6.轮系传动既可以用于相距较远两轴间传动,又可以获得较大传动比。
()四、名词解释轮系五、做一做观察一下汽车的变速箱,总结轮系的功用一、填空题1.轮系。
2.变向。
3.定轴轮、周转轮系。
4.从动轮,传动比。
二、选择题1. D2. C3. B三、判断题1. ×2. X3. X4. Y5. 46. Y四、名词解释轮系答:一系列的齿轮组成的传动系统称为轮系五、做一做观察一下汽车的变速箱,总结轮系的功用答:一系列的齿轮组成的传动系统称为轮系 1.实现两轴间远距禽的运动和动力的传动 2.实现变速传动3.实现换向传动4.实现差速作用一、填空题1.轮系中,首末两轮转速之比,称为轮系的使动比。
2.定轴轮系的传动比,等于组成该轮系的所有轮齿数连乘积与所有轮齿数连乘积之比。
二、选择填空1.轮系中,—转速之比称为轮系的传动比。
A.末轮和首轮B.末轮和中间轮C.首轮和末轮D.首轮和中间轮2,轮系传动比的大小与轮系中的惰轮的齿数—。
机械原理典型例题第七章轮系详解

第八页,共19页。
解法一:
差动轮系1-2-2‘-4-H
行星轮系1-2-3-H
i1H4
n1 nH n4 nH
z2 z3 = 174 z1z2 ' 33
i1H3
n1 nH n3 nH
1 n1 nH
z3 = 5
z1
i14
n1 n4
n1 n4
116
解二:
行星轮系3-2-2‘-4-H 行星轮系3-2-1-H
机械原理典型例题第七章轮系 ppt课件
第一页,共19页。
例1. 在图示轮系中,已知:蜗杆为单头且右旋,转速 n1=1440r/min,转动方向如图示,其余各轮齿数为: Z2 = 40,Z2‘ = 20,Z3 = 30,Z3’ = 18,Z4 = 54, 试: (1) 说明轮系属于何种类型; (2) 计算齿轮4的转速n4;
用箭头确定的构件的转向关系,是指转化 机构中各构件的转向关系,而非该周转轮
系中各构件绝对运动的转向关系。
第七页,共19页。
例6:已知Z1=18,Z2=36,Z2’=33,Z3=90, Z4=87,求i14
3 2 2' 4
H 1
行星轮 — Z2,Z2’ 联动关系 — n2=n2’
系杆 — H 中心轮 — 1,3,4
1800 3
600r
/
min
第六页,共19页。
2'
3 2
H
1 b
i1H3
n1 nH n3 nH
z2 z3 z1z2 '
200 nH 8 100 nH 5
nH
200 13
15.38r
/ min
注意:
转化轮系传动比的“±”号的确定错误,将导 致整个计算结果的错误。
机械设计课后习题--轮系
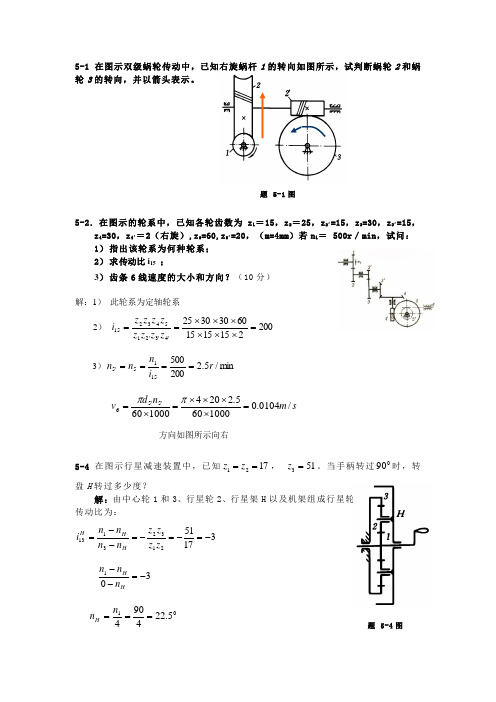
5-1 在图示双级蜗轮传动中,已知右旋蜗杆1的转向如图所示,试判断蜗轮2和蜗轮3的转向,并以箭头表示。
5-2.在图示的轮系中,已知各轮齿数为z l =15,z 2=25,z 2´=15,z 3=30,z 3´=15,z 4=30,z 4´=2(右旋),z 5=60,z 5´=20,(m=4mm )若n l = 500r /min ,试问:1) 指出该轮系为何种轮系;2) 求传动比i 15 ; 3) 齿条6线速度的大小和方向?(10分)解:1) 此轮系为定轴轮系2) 200215151560303025'4'3'21543215=⨯⨯⨯⨯⨯⨯==z z z z z z z z i 3)min /5.22005001515'5r i n n n ==== s m n d v /0104.01000605.2204100060'5'56=⨯⨯⨯⨯=⨯=ππ方向如图所示向右5-4 在图示行星减速装置中,已知1721==z z , 513=z 。
当手柄转过090时,转盘H 转过多少度?解:由中心轮1和3、行星轮2、行星架H 以及机架组成行星轮系,转化轮系的传动比为:3175121323113-=-=-=--=z z z z n n n n i H H H 301-=--HH n n n 015.224904===n n H 题 5-4图题 5-1图方向相同5-5 在图示的手动葫芦中,S 为手动链轮,H 为起重链轮。
已知121=z ,282=z ,142='z ,543=z ,求传动比SH i 。
解:由中心轮1和3、行星轮2-2’、行星架H 行星轮系,故()914125428''1213221321313113-=⨯⨯-=-=-=--==z z z z z z z z n n n n n n i H H H H H 03=n ,1n n s =101===∴HH s sH n n n n i 5-8 在图示圆锥齿轮组成的行星轮系中,已知各轮的齿数为201=z ,302=z ,502='z ,803=z ,m in /501r n =,求H n 的大小和方向。
第11章 轮系习题答案

5’-6-6’-7(8)组成差动轮系
(2)
(3)
关联: (4)
联立解以上方程得到
也就是说,当齿轮7转动一圈时,齿轮8要反方向专动22.27圈,二者的方向相反。
解:1、2为定轴轮系
方向。
2'、3、3'、4、B为周转轮系。
, 。
转向同 。
10、在图示的复合轮系中,设已知n1=3549r/min,又各轮齿数为z1=36,z2=60,z3=23,z4=49,z4’=69,z6=131,z7=94,z8=36,z9=167,试求行星架H的转速 (大小及转向)?
解:转向用画箭头的方法表示
一、填空题:
1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;
周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架 。
4.行星轮系具有1个自由度,差动轮系有2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
(1)说明轮系属于何种类型;
(2)计算齿轮4得转速 ;
(3)在图中标出齿轮4的
(3) 方向←。
4、如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比 ,并指出当提升重物时手柄的转向(从左往右看时的转向)
解:方向判断用画箭头的方法完成,从左往右看时的转向为逆时针方向。
6、在图示自动化照明灯具的传动装置中,已知输入轴的转速n1=19.5r/min,各齿轮的齿数为z1=60,z2=z3=30,z4=z5=40,z6=120,求箱体B的转速nB。
机械学基础(轮系-习题课)

M H 6'
因 n H n M = 1 12 ? 故由式( ),( ),(c) 故由式(b),( )得
nH n1 nM = nM n1 nH = z2′′ z6′ 1 = z6 z7 12 z2 z = 1 z 2 z6 z7 zz z 1 2′′ 6′
3 100 n H 20 × 25 H nH=-100r/min i 13 = = 200 n H 30 × 25 2) n1与n3 反向,即用 n1=100r/min,n3= ห้องสมุดไป่ตู้200r/min代入, 反向, 代入, ) , 代入 100 n H 20 × 25 H i 13 = = 可得 nH=700r/min 30 × 25 200 n H 所求转速的方向,须由计算结果得正负号来决定, 所求转速的方向,须由计算结果得正负号来决定,决不 能在图形中直观判断! 能在图形中直观判断!
右图轮系中, 例1 右图轮系中,已知各轮的齿数 为:z1=48,z2=48,z2'=18,z3=24, , , , , 又n1=250r/min, n3=100r/min,转向 , , 如图所示.试求系杆的转速n 如图所示.试求系杆的转速 H的大 小和方向. 小和方向. 解:这是一个由锥齿轮所组成的周转轮 先计算其转化机构的传动比. 系.先计算其转化机构的传动比.
�
因
=1, n1=1,n3=-1
nH=-1/2
i1H =
n1 1 = = 2 1 nH 行星架与中心轮1转向相反. 行星架与中心轮1转向相反. 2
H n1 n1 n H z2 H i 12 = H = = n2 nH z1 n2
求n2.
注:转速有方 向.
n1=1,nH=-1/2 ,
轮系习题答案

轮系习题答案一、填空题:1.轮系可以分为:定轴轮系和周转轮系。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括:太阳轮、行星轮和行星架。
4.行星轮系具有1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用负号机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-==-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====,已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==?=z z z z 75612332060=+==?=(2)iz z z z zz z z z z17323467123561=-()=-=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m( z 4 z1 ) 1 m( z3 z 4 ) 2
/ / /
z3 100 该轮系由定轴轮系、、/ 、和周转轮系 / 、、/ 、H组成。 12 2 3 1 43 z z 1 n 1 i13 (1) 2 3 / 1 z1 z 2 3 n3 3
1 /
n3 3n1 对于周转轮系有: i1/ 3/
• 解:1、2、3、4组成定轴轮系;5、6、7、8、H组成周转轮系。
i14
n1 z2 z4 24 21 3 5 n4 n1 2400 / min r n4 z1 z3 21 40 5 3
i68
H
n6 nH 2400 nH z z 63 (1)1 5 8 n8 nH n8 nH z6 z7 40
n4 11 n6 0 nH 2 35 而n4 nH 1 3n1 11 i1H 2 0.105 nH 2 35
1和H 2转向相同。
5、图示轮系,均采用标准齿轮传动。已知各轮的齿数分别为Z1=80, Z1/=40,Z2=20,Z2/=30,Z3=40,Z4=30。 试求:Z3/及i1H。 解: • 由同心条件求出Z3/
i13
H1
n1 nH 1 z z 2 (1) 2 2 3/ n3 nH 1 z1 z 2 3 n1 1 nH 1 3n1 nH 1 3
n3 0 i46
H2
n4 nH 2 24 2 z5 z 6 (1) n6 nH 2 z 4 z5 35
H 31 / 8
题9-2图
由齿轮2′,3,4,5和行星架H所组成得行星轮系,得
H i45
4 H z5 100 5 5 H z4 20
4 1 5 4 H
由(1)和(2)式得
1 3 4 1 4 8
• 传动比为:
4 3 i41 1 2
nH的方向 : 表示nH转向的箭头向上
7、图示轮系,已知各轮的齿数分别为Z1=40, Z2=30,Z3=100,Z3/=48,
Z4=24,Z5=96。试求:i1H
。
解:轮系分析 该轮系是由定轴轮系3/、4、5和周转轮系1、2、3、H组成。
i3/ 5 (1)1
/
z 4 z5 2 / z3 z 4
80
i13
H
n1 nH n1 nH 1 z 2 z3 (1) 4 n3 nH nH z1 z 2
n1 5 nH
n1 n 而nH n4 n4 nH 1 5 5 z n 40 i45 4 5 2 n5 z4 20 nH
H
n n z z 5 1 / H (1)1 4/ 3 2 n3 nH z1 z 4
/ / / /
由于n1 n1 ; n3 n3 n1 nH 5 将各数代入得:1H 0.538n1和nH 方向相反。 i n3 nH 2
6、已知图示轮系中各轮齿数,Z1=30,Z4= Z5=21,Z2=24,Z3=Z6=40, Z7=30,Z8=90,n1=960r/min, 方向如图示,求nH的大小和方向。
1、 在图示轮系中,已知:蜗杆为单头且右旋,转速n1=1440r/min,转 动方向如图示,其余各轮齿数为:z2=40,z2/=20,z3=30,z3/=18, z4=54,试: (1)说明轮系的类型; (2)计算齿轮4的转速n4; (3)在图中标出齿轮4的转动方向。 • 解:(1)该轮系为定轴轮系;
由于轮8固定,所以n8 0; 而n6 n4 2400r / min 所以 2400 nH 63 nH 932r / min nH 40
nH与n4同向向下 。
3、图示轮系,均采用标准齿轮传动。Z1=20,Z2=30 ,Z4=20,Z5=40。 求i15。
1 m( z1 z2 ) 1 m( z3 z2 ) z3 解:由同心条件 2 2 该轮系由定轴轮系4、5和周转轮系1、2、3、H组成。
n1 z2 z4 24 21 i14 0.42 n4 z1 z3 30 40 n1 960 n4 0.42 0.42 n6 nH 40 H 1 z5 z8 i68 (1) 其中n6 n4 n8 nH z6 z7 63 由于n8 0 nH 888r / min
5 2' 2 3 H 4 1
解:为求解传动比,可以将该轮系划分为由齿轮 1、2、2′、5和行星架H所组成的行星轮系, 得
H 15
z2 z5 1 H 20 100 5 i 5 H z1 z2 60 20 3
由
5 0,
得:
1 / H 8/ 3
(1)
i3/ 5
n / 3 2而n5 nH n3 2nH n5
H
n13
n1 nH z z 5 (1)1 2 3 n3 nH z1 z 2 2
/
由于n3 n3 i1H 8.5r / min 1和H转向相同
10. 图示轮系中,已知各轮齿数为Z1=60,Z2=20,Z2/=20,Z3=20, Z4=20,Z5=100,试求传动比i41。
z2 50
z2 15
z3 30
z3 1
z5 z4 z3 z2 i15 z1 z2 z3 z4
z5 52
52 40 30 50 577.8 20 15 118
手柄方向箭头向左.
z4 18
z4 40
2、已知图示轮系中各轮齿数,Z1=Z4= Z5=21,Z2=24,Z3=Z6=40, Z7=30,Z8=90,n1=1440r/min,方向如图示,求nH的大小和方向。
z5=1为右旋,试求传动比i18并确定提升重物时的转向.
此轮系为定轴轮系.
I18=n1/n8= z2×z4×z6×z8/z1×z3×z5×z7=
50×30×40×51/20×15×1×18≈722 .22
9.图示为一手摇提升装置,其中各轮齿数均为已知,试求
传动比,并指出当提升重物时手柄的转向。
z1 20
n1 5
n5
2
n1 10 n5
轮1和轮5转向相反。
4、已知图示轮系中各轮齿数,Z1=30,Z2=20,Z2=Z3=25,Z4=35, Z5=20,Z5=25, Z6=30。 试求传动比i1H2 • 解:轮系分析:该轮系由1、2、2/、3、H1组成的周转轮系和4、5、 5/、6、H2组成的周转轮系组成。
• (2)
i
n1 z 2 z3 z 4 40 30 54 14 180 n4 z1 z 2 / z3 / 1 20 18
n4=8r/min (3) n4的转向箭头向左.
• •
8.在下图所示的手摇提升装置中,已知各轮齿数为z1=20,z2 =50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆
11.图示轮系。已知齿数z1=30,z2=20,z2/= z3 = 25, n1=100r/min,n3=200r/min且轮1与轮3转向相反。求nH。 解:
ቤተ መጻሕፍቲ ባይዱ
i13
H
n1 nH z z 2 (1) 2 2 3/ n3 nH z1 z 2 3
因为轮1与轮3转向相反 100 nH 2 nH 700r / min 200 nH 3 与轮1转向相同。