语义分割结果后处理 腐蚀膨胀连通
编程实现膨胀运算或者腐蚀运算
数字图像处理实验编程实现膨胀运算或者腐蚀运算姓名:学好:0904210239指导老师:王韬时间:2012年5月编程实现膨胀运算或者腐蚀运算一、实验原理腐蚀:是一种消除连通域的边界点,使边界向内收缩的处理。
设计一个结构元素,结构元素的原点定位在待处理的目标像素上,通过判断是否覆盖,来确定是否该点被腐蚀掉。
膨胀:是将与目标区域的背景点合并到该目标物中,使目标物边界向外部扩张的处理。
设计一个结构元素,结构元素的原点定位在背景像素上,判断是否覆盖有目标点,来确定是否该点被膨胀为目标点。
二、实验步骤腐蚀:1)扫描原图,找到第一个像素值为1的目标点;2)将预先设定好形状以及原点位置的结构元素的原点移到该点;3)判断该结构元素所覆盖范围内的像素值是否全部为1:如果是,则腐蚀后图像中的相同位置上的像素值为1;如果不是,则腐蚀后图像中的相同位置上的像素值为0;4)重复2)和3),直到所有原图中像素处理完成。
膨胀:1)扫描原图,找到第一个像素值为0的背景点;2)将预先设定好形状以及原点位置的结构元素的原点移到该点;3)判断该结构元素所覆盖范围内的像素值是否存在为1的目标点:如果是,则膨胀后图像中的相同位置上的像素值为1;如果不是,则膨胀后图像中的相同位置上的像素值为0;4)重复2)和3),直到所有原图中像素处理完成。
三、实验程序# include <afxwin.h># include <windows.h># include <iostream.h># include <stdlib.h># include <math.h># define PI 3.14159265typedef struct{double re;double im;}COMPLEX;COMPLEX Add(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re+c2.re;c.im=c1.im+c2.im;return c;}COMPLEX Sub(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re-c2.re;c.im=c1.im-c2.im;return c;}COMPLEX Mul(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re*c2.re-c1.im*c2.im;c.im=c1.re*c2.im+c2.re*c1.im;return c;}int nWidth;int nHeight;int nColorBits;int nColor;int nLen;int nByteWidth;BYTE * lpBitmap;BYTE * lpBits;void OpenFile(CString FileName);void SaveFile(CString FileName);void fushi();void pengzhang();void OpenFile(CString FileName){HANDLE hFile= ::CreateFile(FileName,GENERIC_READ,FILE_SHARE_READ,NULL,OPEN_EX ISTING,FILE_ATTRIBUTE_NORMAL,NULL);if(hFile==0){printf("不能调开文件,请重新选择! \n");return;}DWORD WriteNum;BITMAPFILEHEADER BFH;ReadFile(hFile,&BFH,14,&WriteNum,NULL);if((BFH.bfType!='MB')||(WriteNum!=sizeof(BITMAPFILEHEADER))){printf("不是BMP位图文件或数据有误! \n");return;}nLen = GetFileSize(hFile,NULL)-sizeof(BITMAPFILEHEADER);lpBitmap= new BYTE[nLen];ReadFile(hFile,lpBitmap,nLen,&WriteNum,NULL);BITMAPINFOHEADER * BIH = ((BITMAPINFOHEADER*)lpBitmap);nWidth = BIH ->biWidth;nHeight = BIH ->biHeight;nColorBits= BIH ->biBitCount;nByteWidth= (nWidth*nColorBits+31)/32*4;nColor = (nColorBits>8)?0:(1<<nColorBits);lpBits = lpBitmap + sizeof(BITMAPINFOHEADER) +sizeof(RGBQUAD)*nColor;CloseHandle(hFile);}void SaveFile(CString FileName){HANDLE hFile= ::CreateFile(FileName,GENERIC_WRITE,FILE_SHARE_WRITE,NULL,CREAT E_ALWAYS,FILE_ATTRIBUTE_NORMAL,NULL);if(hFile ==0){printf("不能创建文件,请重新选择! \n");return;}unsigned long WriteNum;BITMAPFILEHEADER BFH;BFH.bfType = 'MB';BFH.bfSize = nLen + sizeof(BITMAPFILEHEADER);BFH.bfOffBits = sizeof(BITMAPFILEHEADER) +sizeof(BITMAPINFOHEADER) + nColor * sizeof(RGBQUAD);BFH.bfReserved1 = BFH.bfReserved2 = 0;WriteFile(hFile,&BFH,sizeof(BITMAPFILEHEADER),&WriteNum,NULL);WriteFile(hFile,(BITMAPINFOHEADER* )lpBitmap,nLen,&WriteNum,NULL);CloseHandle(hFile);}void fushi(){unsigned char * data,* lpDst,* temp ;//分别指向源图像和缓存图像的指针temp=new BYTE[256*256];//暂时分配内存,以保存新图像for (int i=1;i<nHeight-1;i++){for (int j=1;j<nWidth-1;j++){data=(lpBits+nByteWidth*j+i);//指向原图像第j行第i个像素的指针lpDst=(temp+nByteWidth*j+i);//指向目标图像第j行第i个像素的指针*lpDst=255;//目标图像中的当前点先赋成白色if(*data==255){if( *(data-1)==0 || *(data+1)==0 ||*(data-nByteWidth)==0 || *(data+nByteWidth)==0 ||*(data-nByteWidth-1)==0 || *(data-nByteWidth+1)==0 ||*(data+nByteWidth-1)==0 || *(data+nByteWidth+1)==0)*lpDst=0;}else*lpDst=0;}}for(i=0;i<nHeight;i++){for(int j=0;j<nWidth;j++){data=(lpBits+nByteWidth*j+i);lpDst=(temp+nByteWidth*j+i);* data = * lpDst;}delete temp;//释放空间}void pengzhang(){unsigned char * data,* lpDst,* temp ;//分别指向源图像和缓存图像的指针temp=new BYTE[256*256];//暂时分配内存,以保存新图像for (int i=1;i<nHeight-1;i++){for (int j=1;j<nWidth-1;j++){data=(lpBits+nByteWidth*j+i);//指向原图像第j行第i个像素的指针lpDst=(temp+nByteWidth*j+i);//指向目标图像第j行第i个像素的指针*lpDst=0;//目标图像中的当前点先赋成黑色if(*data==0){if( *(data-1)==255 || *(data+1)==255 ||*(data-nByteWidth)==255 || *(data+nByteWidth)==255 ||*(data-nByteWidth-1)==255 || *(data-nByteWidth+1)==255 ||*(data+nByteWidth-1)==255 || *(data+nByteWidth+1)==255)*lpDst=255;}else*lpDst=255;}}for(i=0;i<nHeight;i++){for(int j=0;j<nWidth;j++){data=(lpBits+nByteWidth*j+i);lpDst=(temp+nByteWidth*j+i);* data = * lpDst;}}delete temp;//释放空间}{char OpenFileName[100];char SaveFileName[100];printf("输入待处理的图像路径: \n");gets(OpenFileName);printf("保存处理图像结果的路径: \n");gets(SaveFileName);OpenFile(OpenFileName);cout<<"选择:1腐蚀,2膨胀"<<endl;int n;cin>>n;switch(n){case 1:fushi();break;case 2:pengzhang();break;}SaveFile(SaveFileName);return 0;}四、实验结果原图像:腐蚀后:膨胀后:。
腐蚀膨胀算法详细解释
形态学运算中腐蚀,膨胀,开运算和闭运算(针对二值图而言)6.1腐蚀腐蚀是一种消除边界点,使边界向内部收缩的过程。
可以用来消除小且无意义的物体。
腐蚀的算法:用3x3的结构元素,扫描图像的每一个像素用结构元素与其覆盖的二值图像做“与”操作如果都为1,结果图像的该像素为1。
否则为0。
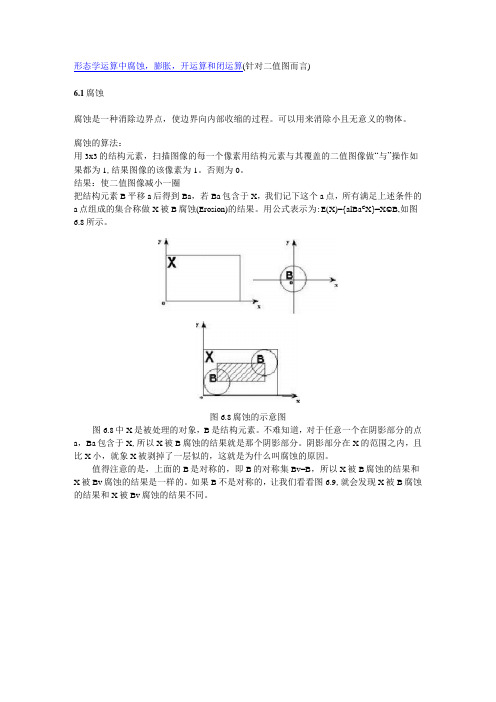
结果:使二值图像减小一圈把结构元素B平移a后得到Ba,若Ba包含于X,我们记下这个a点,所有满足上述条件的a点组成的集合称做X被B腐蚀(Erosion)的结果。
用公式表示为:E(X)={alBa C X}=X©B,如图6.8所示。
图6.8腐蚀的示意图图6.8中X是被处理的对象,B是结构元素。
不难知道,对于任意一个在阴影部分的点a,Ba包含于X,所以X被B腐蚀的结果就是那个阴影部分。
阴影部分在X的范围之内,且比X小,就象X被剥掉了一层似的,这就是为什么叫腐蚀的原因。
值得注意的是,上面的B是对称的,即B的对称集Bv=B,所以X被B腐蚀的结果和X被Bv腐蚀的结果是一样的。
如果B不是对称的,让我们看看图6.9,就会发现X被B腐蚀的结果和X被Bv腐蚀的结果不同。
y图6.9结构元素非对称时,腐蚀的结果不同图6.8和图6.9都是示意图,让我们来看看实际上是怎样进行腐蚀运算的。
在图6.10中,左边是被处理的图象X (二值图象,我们针对的是黑点),中间是结构元素B ,那个标有origin 的点是中心点,即当前处理元素的位置,我们在介绍模板操作时也有过类似的概念。
腐蚀的方法是,拿B 的中心点和X 上的点一个一个地对比,如果B 上的所有点都在X 的范围内,则该点保留,否则将该点去掉;右边是腐蚀后的结果。
可以看出,它仍在原来X 的范围内,且比X 包含的点要少,就象X 被腐蚀掉了一层。
o Q Q Q o & QO Qo Q o O oooo o o o o o 0- 0 O 0 o o •• • ■ Oo o oo o o 0 o o o o o 0 0 o o o ••o o o oo o o o ■ ■ o o 0 0 o o o ••o 0 0 oo o o 0 ■ • ♦ o QQ Q ■0 0 & o Q Q Q 0 0 * * 0 0 0 O 0 0 • ♦ ♦■ 0 Q Q ◎ 00o o ■ •0 0 o O ■ ■ ■ ■ *« O Q Qo o■ ■ ■ ■ Q Q c- O■ * ■ o GO O O O o o •o o ■ •• ■ o o o o O oO ■ ■ ■o 0o O O o O ♦<Q 0■••■ o a o o O o O o o 0 0 o 0oO o oooo\>o0 00o o o o 0 0 0'originFEX e 6图6.10腐蚀运算 图6.11为原图,图6.12为腐蚀后的结果图,能够很明显地看出腐蚀的效果。
腐蚀膨胀算法原理
腐蚀膨胀算法原理
腐蚀膨胀算法(Erosion-DilationAlgorithm,缩写为EDA)是图像处理中最常用的算法之一。
它主要应用于图像的二值化处理,可以有效地消除图像中的噪声,以及实现图像中文字和物体的分割。
EDA是一种分水岭算法(Watershed Algorithm),该算法包括两个步骤,腐蚀和膨胀。
腐蚀步骤将从图像中提取图像对象的轮廓,而膨胀步骤将对象的轮廓填充,从而实现对图像对象的分割。
一般来说,EDA算法可以分为以下两步:
(1)腐蚀:腐蚀是图像处理中常用的技术,它的目的是去除图像中的噪声,消除图像中的噪点,并实现对图像中的文字或物体的轮廓提取。
腐蚀的基本原理是:使用一个结构元素(structuring element),它可以是不同类型的形状,如圆形、菱形、矩形等,将图像中某像素的非零元素替换为零。
(2)膨胀:膨胀是EDA算法中另一个重要的步骤,它是腐蚀的反向过程。
膨胀的基本原理是:使用一个结构元素将图像中某像素的零元素替换为非零元素,如果临近的像素是非零元素,则认为此像素属于某个对象的轮廓。
EDA算法的优点在于它既可以去除噪声,又可以实现文字或物体的分割。
此外,EDA算法还性能卓越,比一般算法要快得多,是图像处理中用到较多的算法之一。
但EDA算法也存在缺点:结构元素的选择不当,会影响到最终的结果;由于腐蚀操作的迭代,会导致目标图像的误差及失真问题;同
样,膨胀操作也会null影响图像的体积及精度。
总而言之,腐蚀膨胀算法是一种有效的图像处理算法,在图像的噪声消除、文字分割等应用中均有良好的效果,但也有一定的缺点,应该合理选择结构元素,以保证算法的正确性和最佳效果。
二值形态学膨胀、腐蚀、开、闭运算opencv
【二值形态学膨胀、腐蚀、开、闭运算opencv的深度解析】一、概念介绍1. 二值形态学在图像处理中,二值形态学是一种针对二值图像进行的形态学操作,主要包括膨胀、腐蚀、开、闭运算等。
2. 膨胀膨胀是二值形态学中的一种基本操作,它能够使目标区域扩张并填充内部的空洞,从而使目标变大。
3. 腐蚀腐蚀是二值形态学中的另一种基本操作,它能够使目标区域收缩并去除边缘细节,从而使目标变小。
4. 开运算开运算是先腐蚀后膨胀的组合操作,可以用来去除图像中的噪声和小的干扰目标。
5. 闭运算闭运算是先膨胀后腐蚀的组合操作,可以用来填补图像中的小孔和裂缝。
二、深入探讨1. 膨胀的原理和作用膨胀通过结构元素的滑动来扩张目标区域,可以使目标变大,填充空洞,连接断裂的目标,是图像处理中常用的操作之一。
2. 腐蚀的原理和作用腐蚀通过结构元素的滑动来收缩目标区域,可以使目标变小,去除边缘细节,分离接触的目标,也是图像处理中常用的操作之一。
3. 开闭运算的应用场景开运算通常用于去除图像中的小噪声和杂点,可以平滑目标轮廓,提高目标边缘的连通性;闭运算通常用于填补图像中的小孔和断裂,可以使目标更加完整,减少断裂和裂缝。
4. opencv中的二值形态学函数opencv提供了丰富的二值形态学函数,可以方便地进行膨胀、腐蚀、开、闭运算,如cv2.dilate()、cv2.erode()、cv2.morphologyEx()等,可以通过设置结构元素的形状和大小来调整操作效果。
5. 个人观点和理解对于二值形态学操作,我认为膨胀和腐蚀是其基础,而开闭运算则是在这两者基础上的进一步应用,能够更加精细地处理目标区域,去除干扰和噪声,提取有效信息。
在实际应用中,需要根据具体情况选择不同的操作和参数,以达到最佳的处理效果。
三、总结回顾通过本文的介绍和分析,我们深入理解了二值形态学中的膨胀、腐蚀、开、闭运算的原理和作用,以及在opencv中的应用方式。
我们也从个人观点出发,探讨了这些操作的实际意义和效果。
腐蚀膨胀算法详细解释
腐蚀膨胀算法详细解释腐蚀算法是指通过与给定的结构元素进行最小值运算以缩小图像的白色区域。
它在图像中寻找白色区域,对这些区域进行腐蚀操作,使它们变得更小。
这种算法主要用于图像去噪、形态学滤波等操作。
腐蚀算法的步骤如下:1.定义结构元素:结构元素是一个小的二值图像,通常是一个正方形或圆形。
它用于定义腐蚀操作的形状和大小。
2.将结构元素与原始图像进行最小值运算:以结构元素为基准,将其放置在原始图像上不同的位置,并计算结构元素与原始图像上对应像素位置的最小值。
将得到的最小值作为输出图像上对应位置的像素值。
这一过程即为腐蚀操作。
3.重复进行腐蚀操作:对于腐蚀后的输出图像,将其作为新的输入图像,再次进行腐蚀操作,直到达到预期的腐蚀效果为止。
膨胀算法与腐蚀算法相反,它通过与给定的结构元素进行最大值运算,来放大图像的白色区域。
膨胀算法主要用于图像的填充、轮廓增强等操作。
膨胀算法的步骤如下:1.定义结构元素:结构元素与腐蚀算法相同,用于定义膨胀操作的形状和大小。
2.将结构元素与原始图像进行最大值运算:以结构元素为基准,将其放置在原始图像上不同的位置,并计算结构元素与原始图像上对应像素位置的最大值。
将得到的最大值作为输出图像上对应位置的像素值。
这一过程即为膨胀操作。
3.重复进行膨胀操作:对于膨胀后的输出图像,将其作为新的输入图像,再次进行膨胀操作,直到达到预期的膨胀效果为止。
腐蚀和膨胀算法常常结合使用,形成一对形态学操作,用于提取图像特征,如边缘检测。
具体的实现方法有:1.图像初始化:将输入图像转为二值图像。
如原始图像是灰度图像,可以使用阈值分割将图像转为二值图像。
2.定义结构元素:根据具体应用需求,选择相应形状和大小的结构元素。
3.腐蚀操作:对于二值图像,将结构元素与图像进行最小值运算,得到腐蚀后的图像。
4.膨胀操作:对于腐蚀后的图像,将结构元素与图像进行最大值运算,得到膨胀后的图像。
5.形态学操作:将膨胀操作的结果减去腐蚀操作的结果,得到最终的形态学操作结果。
先膨胀后腐蚀的运算_解释说明以及概述

先膨胀后腐蚀的运算解释说明以及概述1. 引言1.1 概述在图像处理和形态学图像分析领域,先膨胀后腐蚀的运算被广泛应用。
该运算是一种基于形态学思想的操作,它通过对图像进行膨胀和腐蚀两个步骤的组合操作,能够改变图像的形状、大小、结构等特征。
这种运算方法具有一定的特点和优势,已被证明在许多应用场景中具有重要价值。
1.2 文章结构本文将首先介绍先膨胀后腐蚀的运算的定义和原理,在此基础上详细解释其具体步骤,并提供实例进行说明。
接着,将探讨该运算在图像处理、形态学图像分析以及模式识别等领域中的应用。
同时,本文还会与其他相关运算进行比较分析,并对不同尺寸结构元素对先膨胀后腐蚀结果影响进行深入研究。
最后,通过总结与展望来评估先膨胀后腐蚀运算的局限性和未来发展趋势。
1.3 目的本文旨在深入探讨先膨胀后腐蚀的运算,全面了解其原理、特点和应用领域,以及与其他相关运算的比较分析。
通过本文的阐述,读者将能够理解并掌握先膨胀后腐蚀运算,并能在实际应用中灵活运用该方法。
对于图像处理、形态学图像分析以及模式识别等领域的研究人员和工程师而言,本文将为他们提供有价值的参考和指导。
以上是“1. 引言”部分的内容,请根据需要进行修改和补充。
2. 先膨胀后腐蚀的运算解释说明:2.1 膨胀操作定义与原理:膨胀是形态学图像处理中的基本运算之一,它可以用来增强图像中亮度较高的区域。
膨胀操作基于结构元素,通过将结构元素沿着图像的每个像素进行平移,并找出覆盖范围内的最大值作为输出像素的灰度值。
这意味着,通过膨胀操作,图像中亮度较高的区域将会逐渐扩展。
膨胀操作可以用数学形式描述如下:D = A ⊕B其中,D表示进行膨胀后所得到的图像,A表示待处理的原始图像,B表示结构元素。
2.2 腐蚀操作定义与原理:与膨胀相反,腐蚀是一种可以去除图像中亮度较低区域的操作。
它同样依赖于结构元素,并根据在覆盖范围内找出最小值作为输出像素的灰度值。
因此,通过连续进行多次腐蚀操作,亮度较低或细小的细节将会不断被消除。
Halcon之膨胀,腐蚀,开闭运算

Halcon之膨胀,腐蚀,开闭运算膨胀:对边界点进行扩充,填充空洞,使边界向外部扩张的过程。
腐蚀:消除物体边界点,使边界向内部收缩的过程,把小于结构元素的物体去除掉.开运算:先腐蚀后膨胀的过程称为开运算,作用:去除孤立的小点,毛刺,消除小物体,平滑较大物体边界,同时不改变其面积.(此处的不改变其面积是有条件的,即结构元素设置的必须要合理)闭运算:先膨胀后腐蚀的过程是闭运算。
作用:填充物体内细小的空洞,连接临近物体,平滑边界,同时不改变其面积。
(此处的不改变其面积是有条件的,即结构元素设置的必须要合理)膨胀与腐蚀的主要作用:(1)消除噪声(2)分割(isolate)出独立的图像元素,在图像中连接(join)相邻的元素(3)寻找图像中明显的极大值或极小值区域(4)求出图像的梯度Notice:膨胀和腐蚀是对白色部分(高两部分)而言的,不是黑色部分,膨胀是图像中的高亮部分进行膨胀,类似于“领域扩张”,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮部分被腐蚀,类似于“领域被蚕食”,效果图拥有比原图更小的高亮区域膨胀腐蚀read_image (Image,'Fabrik')*使用固定的阈值分割图像threshold (Image, Region, 128, 255) *使相邻的区域连接成为一个整体,连通处理connection (Region, ConnectedRegions)*根据面积过滤出我们需要提取的区域select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 8000, 9000)*使用矩形结构元素进行膨胀dilation_rectangle1 (SelectedRegions, RegionDilation, 3, 3) *使用圆形结构元素进行膨胀dilation_circle (SelectedRegions, RegionDilation1, 2.5)*使用矩形结构元素进行腐蚀erosion_rectangle1 (SelectedRegions, RegionErosion, 3, 3)*使用圆形结构元素进行腐蚀erosion_circle (SelectedRegions, RegionErosion1,2.5)*开运算opening_rectangle1 (SelectedRegions, RegionOpening, 3, 3) *闭运算closing_rectangle1 (SelectedRegions, RegionClosing, 3, 3)。
腐蚀膨胀算法
腐蚀膨胀算法腐蚀膨胀算法是一种基于形态学的图像处理方法,它提供了一种高效、有用的解决方案,用于提取图像中的特征。
腐蚀膨胀算法最初由德国数学家Herbert A. Hausser在1946年提出,至今已经在计算机视觉领域取得了巨大的成功。
腐蚀膨胀算法是一种模式填充算法,它将图像分割成若干个连续的图元,然后利用腐蚀膨胀的方法,从已知图像中提取新的图元,并根据相关的阈值来确定新的图元是否被确认为真实的特征。
这种方法在提取图像中的轮廓特征时尤为有效。
通常,腐蚀膨胀算法的实现包括以下几个步骤:1.腐蚀:通过改变图像中的像素值,使其与图像的边缘更加相似;2.膨胀:通过加强与腐蚀后图像中的像素值相似的像素,使其与图像的边缘更加相似;3.计算结果:将腐蚀后的图像与膨胀后的图像进行比较,结果用来表示它们的相似程度;4.阈值处理:根据相似程度的结果,确定每一个图元是否作为真实的特征被提取。
腐蚀膨胀算法在计算机视觉中具有重要作用,它可以用于检测图像中的轮廓特征,也可以用于形状识别、图像分割等多种应用。
除此之外,它还可以用于处理文本中的词汇和语义信息,是文本信息处理的一种重要工具。
腐蚀膨胀算法的实现也比较容易,它可以使用图像处理的基本技术实现,如卷积运算、图像滤波、像素级处理等。
同时,显著性检测技术也可以更好地实现腐蚀膨胀算法,从而更有效地提取出图像特征。
此外,腐蚀膨胀算法也可以利用图像处理技术,如颜色分割、形状分析等来实现,从而提取出图像中更为详细的特征信息,以及复杂图像处理问题的解决方案。
最后,我们可以把腐蚀膨胀算法应用于图像识别、机器人导航、地面目标检测等多种现实世界中的应用,所获得的效果甚至可以比人眼可见的结果更加准确。
综上,腐蚀膨胀算法是一种高效且有用的图像处理方法,它可以用于从图像中提取特征,也可以用来提取文本特征,甚至可以应用于实际世界中的复杂问题,具有广泛的应用前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
语义分割结果后处理腐蚀膨胀连通
标题:语义分割结果后处理:腐蚀膨胀连通
引言:
语义分割是计算机视觉领域的重要任务,其目标是将图像中的每个像素分配给特定的语义类别。
然而,语义分割的结果往往存在一些噪声和不连续性,需要进行后处理来提高分割的准确性和连通性。
本文将介绍一种常用的后处理方法:腐蚀膨胀连通,以帮助读者更好地理解和应用语义分割技术。
一、语义分割简介
语义分割是计算机视觉中的一项重要任务,旨在将图像中的每个像素分配给特定的语义类别。
通过语义分割,计算机能够理解图像中不同物体的边界和区域,为图像理解、目标检测等应用提供基础。
二、语义分割结果的后处理需求
在进行语义分割后,我们经常会发现分割结果存在一些噪声、不连续或不完整的情况。
这些问题会影响后续图像分析和处理的准确性和效果。
因此,我们需要对语义分割结果进行后处理,以提高分割的质量。
三、腐蚀膨胀连通的原理
腐蚀膨胀连通是一种常用的语义分割结果后处理方法。
它基于形态学图像处理的概念,通过腐蚀和膨胀操作来消除噪声、填充空洞和
连通分割结果。
1. 腐蚀操作:
腐蚀操作是将图像中的每个像素点与其邻域像素点进行逻辑与运算,得到一个新的像素值。
腐蚀操作可以有效地消除图像中的小噪声和不连续区域,使分割结果更加清晰和连续。
2. 膨胀操作:
膨胀操作与腐蚀操作相反,将图像中的每个像素点与其邻域像素点进行逻辑或运算,得到一个新的像素值。
膨胀操作可以填充图像中的空洞,使分割结果更加完整和准确。
3. 连通操作:
连通操作是指将相邻的像素点归为同一个语义类别。
通过连通操作,可以消除分割结果中的孤立像素点,使分割区域更加连续和准确。
四、腐蚀膨胀连通的实现步骤
腐蚀膨胀连通的实现步骤如下:
1. 对语义分割结果进行腐蚀操作,消除噪声和不连续区域。
2. 对腐蚀后的结果进行膨胀操作,填充空洞。
3. 对膨胀后的结果进行连通操作,消除孤立像素点。
通过以上步骤,可以得到更加准确和连续的语义分割结果。
五、腐蚀膨胀连通的应用场景
腐蚀膨胀连通方法可以应用于各种语义分割任务中,例如目标检测、图像分析和场景理解等。
在实际应用中,我们可以根据具体任务和需求对腐蚀和膨胀的操作次数进行调整,以获得最佳的分割效果。
六、总结
语义分割是计算机视觉领域的一项重要任务,但分割结果往往存在一些噪声和不连续性。
为了提高分割的准确性和连通性,我们可以采用腐蚀膨胀连通的后处理方法。
该方法基于形态学图像处理的概念,通过腐蚀和膨胀操作消除噪声、填充空洞和连通分割结果。
腐蚀膨胀连通方法在各种语义分割任务中有广泛的应用,可以帮助我们获得更加准确和连续的分割结果,为后续的图像分析和处理提供更好的基础。
希望本文能给读者对语义分割结果后处理的腐蚀膨胀连通方法有所了解,并能在实际应用中取得良好的效果。