第3章 振动系统的运动微分方程题解
第3章 多自由度机械振动系统 作业答案
⎤ ⎡ x1 ⎤ ⎡ p1 ( t ) ⎤ ⎢x ⎥ = ⎢ p t ⎥ − k3 ⎥ ⎥ ⎢ 2 ⎥ ⎢ 2 ( )⎥ k3 + k 4 ⎥ ⎦⎢ ⎣ x3 ⎥ ⎦ ⎢ ⎣ p3 ( t ) ⎥ ⎦ 0
d ∂T ∂T ∂U ∂D ( )− + + = Qi i ∂qi ∂qi ∂q i dt ∂q
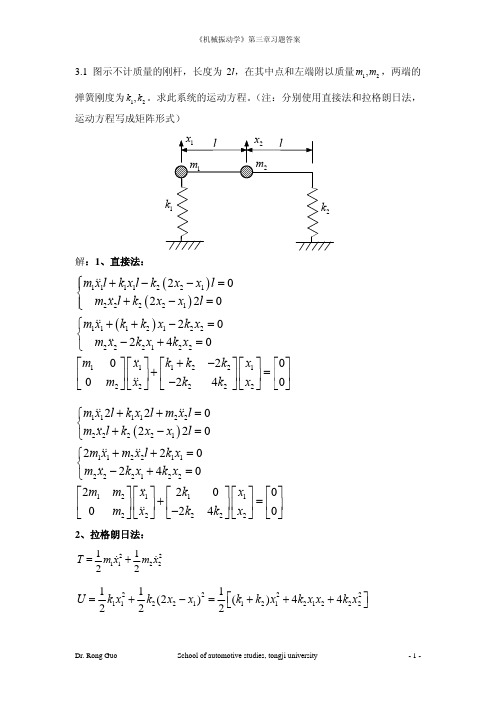
2、拉格朗日法:
1 1 2 12 + m2 x 2 T = m1 x 2 2
U=
1 2 1 1 2 ⎤ k1 x1 + k2 (2 x2 − x1 ) 2 = ⎡ (k1 + k2 ) x12 + 4k2 x1 x2 + 4k2 x2 ⎣ ⎦ 2 2 2
Dr. Rong Guo
School of automotive studies, tongji university
⎡ k1r 2 K =⎢ 2 ⎣ − k1r
⎡3 2 ⎢ 2 Mr ⎢ ⎢ 0 ⎢ ⎣ 0
⎤ ⎥ ( k1 + k2 ) r 2 ⎦ − k1r 2
− k1r 2 ⎤ ⎡θ1 ⎤ ⎡0 ⎤ ⎥⎢ ⎥ = ⎢ ⎥ θ 2 ⎦ ⎣0 ⎦ ( k1 + k2 ) r 2 ⎦ ⎣
⎤ ⎤ ⎡ k1r 2 ⎥ ⎡θ ⎥ ⎢ 1 ⎥ + ⎢ 3 −k r 2 θ Mr 2 ⎥ ⎣ 2 ⎦ ⎣ 1 ⎥ ⎦ 2
x1 2l + k1 x1 2l + m2 x2l = 0 ⎧m1 ⎨ ⎩m2 x2l + k2 ( 2 x2 − x1 ) 2l = 0 x1 + m2 x2l + 2k1 x1 = 0 ⎧2m1 ⎨ x2 − 2k2 x1 + 4k2 x2 = 0 ⎩ m2 ⎡ 2m1 ⎢ 0 ⎣ m2 ⎤ ⎡ x1 ⎤ ⎡ 2k1 ⎢ ⎥ + ⎢ −2 k m2 ⎥ x 2 ⎦⎣ 2⎦ ⎣ 0 ⎤ ⎡ x1 ⎤ ⎡0 ⎤ ⎢ x ⎥ = ⎢0 ⎥ 4k 2 ⎥ ⎦⎣ 2⎦ ⎣ ⎦
机械振动基础课后习题解答_第3章习题
m
0
0 m
u1 u2
3k k
k 3k
u1 u2
2ku0
sin 0
t
K
2M
3k
2m
k
k
3k 2m
H11 ( )
3k 2m ()
H 21 ( )
k ()
u1(t) u2 (t)
H11 ( ) H21()
2ku0
sin
t
3k 为反共振频率 m
P140,3-9: 图示系统初始静止,求左端基础产生阶跃位移u0后系统的响应。
ml2 1 0 M 3 0 7 /16
K
l2k 16
9 9
9
13
| K 2M | 0
1 0.65
k m
2 2.62
k m
P139,3-3: 建立图示系统的运动微分方程,并求当ki k,i 1, 6, m1 m, m2 2m, m3 m时的固有 频率和固有振型。
m1
M
m2
u2
c
3c
2c
u2
k
3k
2k
u2
0
m u3 0 2c 2c u3 0 2k 2k u3 f0
1 0,2
k m
, 3
2k m
1 1 1
φ1
1 , φ2
0
, φ3
1
1
1/ 2
1
u1 1
u2
1
u3 1
1 0 1/ 2
1 q1
1
q2
1 q3
)d
u0 2
(1 cos1t)
q2
(t)
u0 2
(1
cos 2t )
第3章 振动系统的运动微分方程题解
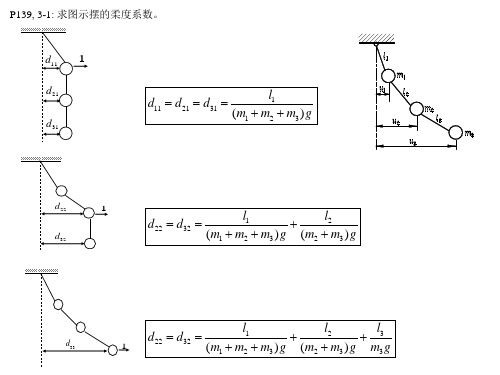
45 / 2045习 题3-1 复摆重P ,对质心的回转半径为C ρ,质心距转动轴的距离为a ,复摆由水平位置无初速地释放,列写复摆的运动微分方程。
解:系统具有一个自由度,选复摆转角ϕ为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程O O M J =ϕ其中)(22a gP J C O +=ρ 得到复摆运动微分方程为ϕϕρcos )(22Pa a gP C =+ 或0cos )(22=-+ϕϕρga a C3-2均质半圆柱体,质心为C ,与圆心O 1的距离为e ,柱体半径为固定R ,质量为m ,对质心的回转半径为C ρ,在平面上作无滑动滚动,如题3-2图所示,列写该系统的运动微分方程。
解:系统具有一个自由度,选θ为广义坐标。
半圆柱体在任意位置的动能为:222121ωC C J mv T +=题3-1图题3-2图46 / 2046用瞬心法求C v :2222*2)cos 2()(θθθ Re R e CC v C -+== θω = 2CC m J ρ= 故2222221)cos 2(21θρθθ Cm Re R e m T +-+=系统具有理想约束,重力的元功为 θθδd mge W sin -=应用动能定理的微分形式W dT δ=θθθρθθd mge m Re R e m d C sin 21)cos 2(2122222-=⎥⎦⎤⎢⎣⎡+-+ θθθθθθθθθθρd mge d mRe d mRe d R e m C sin sin cos 2)(2222-=+-++ 等式两边同除dt ,θθθθθθθθθθρ sin sin cos 2)(2222mge mRe mRe R e m C -=+-++ 0≠θ ,等式两边同除θ故微分方程为0sin sin )cos 2(2222=+++-+θθθθρθmge mRe Re R e m C ① 若为小摆动θθ≈sin ,1cos ≈θ,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动的微分方程为0])[(22=++-θθρge r R C要点及讨论(1)本题也可以用平面运动微分方程求解。
振动力学(高教版)部分课后习题答案

3c 1 2a mk 1 c 2m n l 3
l mgl k 0 a a , 0 2 2ka2 1.12 面积为 S、质量为 m 的薄板连接于弹簧下端,在粘性流体中振动,如图 E1.12 所示。作用于 mg
薄板的阻尼力为 Fd 2Sv ,2S 为薄板总面积,v 为速度。若测得薄板无阻尼自由振动的周期为 T0 , 在粘性流体中自由振动的周期为 Td 。求系数 。
k2 m x1 k1 c1 m c2 k2 x2 k1
c2
k2 x
m x
m
c2 x
c1 x1
x 1 k1 x x1 c1 x
图 E2.1 解:
答案图 E2.1(a)
答案图 E2.1(b)
等价于分别为 x1 和 x2 的响应之和。先考虑 x1 ,此时右端固结,系统等价为图(a) ,受力为图(b) , 故:
考虑到 x2 t 的影响,则叠加后的 xt 为:
xt
i 1
2
k
Ai ki2 ci2i2 k2 m
2 2 i
1
c c c sin it tg 1 1 2 2i tg 1 i i 2 k1 k2 i m ki c1 c2 i2
ax2 x1 a 2 k1 b 2 k2 mg ab a b2 k1k2
a 2 k1 b 2 k2 1 1 x x0 x3 mg mg 2 k0 a b k1k2 k3
则等效弹簧刚度为:
ke
则固有频率为:
a b2 k1k2k3 2 a 2 k1k3 b 2 k2 k3 a b k1k2
燕山大学振动理论习题答案
=l/2,l3=l/4,不计钢杆质量。试求系统的无阻尼固有频率n 及阻尼 。
图 2-9 {2.26} 图 T 2-26 所示的系统中,m = 1 kg,k = 144 N / m,c = 48 N•s / m,l1 = l = 0.49
m,l2 = 0.5 l, l3 = 0.25 l,不计刚杆质量,求无阻尼固有频率n 及阻尼 。
解:图(1)为系统的静平衡位置,以 为系统的广义坐标,画受力如图(2)
I 2l c (2l ) 3l k( 3l) 3lP0 sint
又 I=ml2
4c m
k m
3 ml
P0
sin t
则
p
2 n
9k m
2n
4c m
,
h 3p0 ml
B
h ( pn2 2 )2 (2n)2
根据:
Tmax Vmax, xmax n xmax
n2
k2 m1
k1
R12 R22
I R22
3 2 m2
2-8 如图 2-8 所示的系统中,钢杆质量不计,建立系统的运动微分方程,并求临 界阻尼
系数及阻尼固有频率。
图 2-8
a
ca
b
kb
ml
l
解:
ml l ca a kb b 0 ml2 ca2 kb2 0
(2)若将支撑突然撤去,质量块又将下落多少距离?
{2.17} 图 T 2-17 所示的系统中,四个弹簧均未受力,k1= k2= k3= k4= k,试问: (1)若将支承缓慢撤去,质量块将下落多少距离? (2)若将支承突然撤去,质量块又将下落多少距离?
k1
k2
k3
m
k4
解:
上海交通大学出版社 大学物理教程 3振动与波习题思考题答案

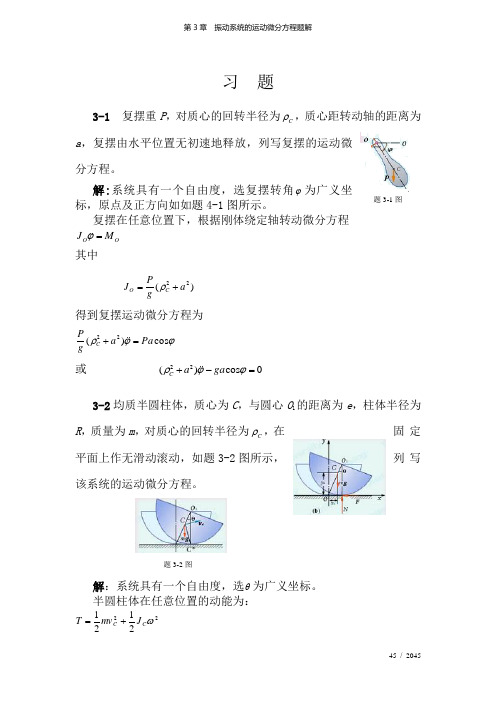
习题33-1.原长为m 5.0的弹簧,上端固定,下端挂一质量为kg 1.0的物体,当物体静止时,弹簧长为m 6.0.现将物体上推,使弹簧缩回到原长,然后放手,以放手时开始计时,取竖直向下为正向,写出振动式。
(g 取9.8)解:振动方程:cos()x A t ωϕ=+,在本题中,kx mg =,所以9.8k =; ∴ω===。
取竖直向下为x 正向,弹簧伸长为0.1m 时为物体的平衡位置,所以如果使弹簧的初状态为原长,那么:A =0.1m ,当t =0时,x =-A ,那么就可以知道物体的初相位为π。
所以:0.1cos x π=+)即:)x =-。
3-2.有一单摆,摆长m 0.1=l ,小球质量g 10=m ,0=t 时,小球正好经过rad 06.0-=θ处,并以角速度0.2rad/s θ= 向平衡位置运动。
设小球的运动可看作简谐振动,试求:(1)角频率、频率、周期;(2)用余弦函数形式写出小球的振动式。
(g 取9.8)解:振动方程:cos()x A t ωϕ=+ 我们只要按照题意找到对应的各项就行了。
(1)角频率: 3.13/rad s ω===,频率:0.5Hz ν=== ,周期:22T s ===; (2)振动方程可表示为:cos 3.13A t θϕ=+(),∴ 3.13sin 3.13A t θϕ=-+ () 根据初始条件,0t =时:cos A θϕ=,0(12sin 0(343.13Aθϕ>=-< ,象限),象限)可解得:2008.810227133 2.32A m ϕ-=⨯==-=-,, 所以得到振动方程:28.810cos 3.13 2.32t m θ-=⨯-() 。
3-3.一质点沿x 轴作简谐振动,振幅为cm 12,周期为s 2。
当0=t 时,位移为cm 6,且向x 轴正方向运动。
求:(1)振动表达式;(2)s 5.0=t 时,质点的位置、速度和加速度;(3)如果在某时刻质点位于cm 6-=x ,且向x 轴负方向运动,求从该位置回到平衡位置所需要的时间。
振动力学(两自由度系统和多自由度系统)

2
振动理论及应用
第3章 多自由度系统的振动
3.1 两自由度系统的振动方程 ——刚度矩阵和质量矩阵
建立运动微分方程的方法和单自由度系统基本一样, 但难 度更大。
3.1.1 运动微分方程
标准的m-k-c系统,对每一质量利用牛顿定律得:
3
振动理论及应用
坐标原点仍取在静平衡位置
具体求解时,只假设j坐标处的位移为1,其它各坐标的位 移均为0。
7
振动理论及应用
5.2.3 惯性影响系数与质量矩阵
第3章 多自由度系统的振动
质量矩阵[M]中的元素称为惯性(质量)影响系数,其 mij的力学意义是:仅在j坐标处产生单位广义加速度,需在i坐 标处施加的广义力。
具体求解时,只假设j坐标处的加速度为1,其它各坐标的 加速度均为0。
2
x1 5 kx1 5 kx2
V x2
2 5
kx1
1 5
kx2
26
振动理论及应用
第3章 多自由度系统的振动
计算广义力,设只有x1处产生虚位移x1,则
Q1
cx1 x1 x1
cx1
同样设x2处产生虚位移x2,则
Q2
c 0
x2
0
代入拉格朗日方程即可。
27
振动理论及应用
第3章 多自由度系统的振动
5l 3
48EI
k12
l3 3EI
k22
1
求出各个刚度系数即组 成刚度矩阵[K]。
17
振动理论及应用
第3章 多自由度系统的振动
用拉格朗日方程 建立振动系统的运动微分方程
对于非标准的m-k-c多自由度振动系统,用传统的动力学 方法建立运动微分方程比较困难,更适合使用拉格郎日方程和 能量的方法。拉格郎日方程为:
3振动系统的运动微分方程
W ( j) Qj q j
若主动力为有势力,须将势能U表示为广义坐 标的函数。
4. 建立拉氏方程并加以整理,得出n个二阶常微 分方程。 5. 求出上述一组微分方程的积分。
Mechanical and Structural Vibration
3.2 拉格朗日运动方程 例 图示系统,摆的支点在水平方向受到弹性约束,其总刚 度为 k ,摆的质量为 m ,摆长为 l 。试用拉格朗日方程求出系 统的运动方程。 解: (1)选择x及 为广义坐标 (2)动能及势能
拉格朗日方程
d T T V Q i d t q q q i i i
( i 1 , 2 , , n )
图刚体微幅运动
计算拉格朗日方程中各项导数
d T T m x ; 0 d t x x
Mechanical and Structural Vibration
第二类拉格朗日方程
L L 代入拉氏方程: d ( ) 0( j 1,2, , k ) d t q q j j
d L L ( ) 0 d t x x
例 题
d L Ltural Vibration
第3章 振动系统的运动微分方程
3.2 拉格朗日(Lagrange)运动方程
Mechanical and Structural Vibration
3.2 拉格朗日运动方程
3.2.3 完整的保守系统的拉格朗日运动方程
拉格朗日方程提供了解决有限自由度完整系统运动的一个普遍 的简单而又统一的方法。
3.2 拉格朗日运动方程
d T T I ; 0 O d t
V k ( x a ) a k ( x a ) a k ( y a ) a k ( y a ) a 1 1 1 2 2 2 3 3 3 4 4 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
⑤应用动能定理建立系统得受力与运动间得关系。
(3)在理想约束、主动力又为势力得情况下,可用机械能守恒定律建立系统运动微分方程。
(4)对于多自由度系统,如两个自由度系统,动能定理只给出一个方程,必须与其她定理,如动量定理或动量矩定理联合应用,才能得到另外一个方程。
ﻩ,
系统得动能
ﻩ
主动力得元功
根据动能定理建立得方程为
所以
“—”号说明当取正值时为负,即反时针方向。
(3)本题也可用平面运动微分方程求解,读者试列出方程。
3-4如题3-4图所示,均质圆柱体质量为m,半径为r,沿倾斜角为得三角块作无滑动滚动,质量为M得三角块置于光滑得水平面上。列写该系统得运动微分方程。
对于图(b),建立刚体得水平运动微分方程为
ﻩﻩ(1)
对于图(c):建立刚体在铅垂平面内得运动微分方程为
ﻩﻩ(2)
ﻩ(3)
ﻩ(4)
其中xC、yC及x均就是对固定坐标系得坐标,同时考虑到微小运动得假说,于就是有
ﻩﻩ(5)
ﻩ(6)
由方程(1)、(2)消去未知力,FOx并考虑式(5)得
ﻩ(7)
又由方程(2)、(3)与(4)消去未知力FOy、FOx,并考虑式(5)与(6),得
(2)本题也可用机械能守恒定律求解。
系统得动能ﻩ
选半圆柱体中心O1所在平面为零势面,系统得势能
ﻩ
由ﻩ
ﻩ
两边对时间求导数,即可得到与式①相同得运动微分方程。
3-3均质杆AB,长l,质量为m,沿光滑墙面滑下,如题3-3图所示。设水平面也为光滑得。列写该系统得运动微分方程。
题3-3图
解:系统具有一个自由度,选为广义坐标。系统在任一位置得动能为
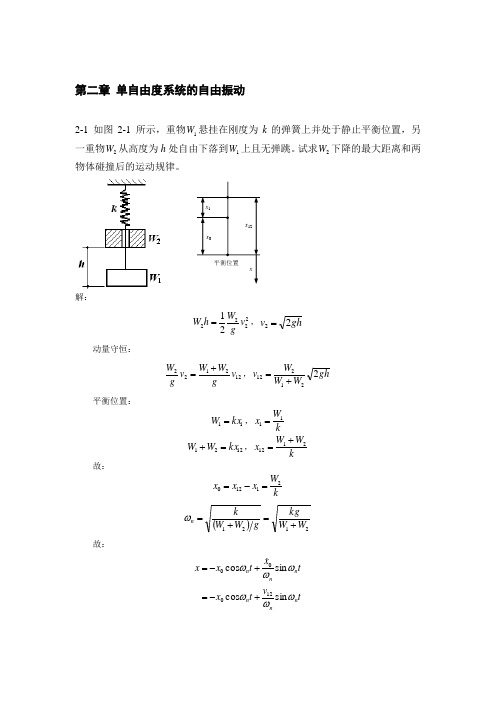
3-5题3-5图所示为刚性建筑模型。刚性基础质量为m,刚性建筑得质量为M,对质心C得转动惯量为IC。两刚体在O处铰接并附有刚度系数为k1得扭转弹簧。其她参数如图示。设地基有水平运动z(t),试建立系统微幅运动微分方程。图中。
解:应用牛顿矢量力学建立刚体运动得微分方程时,首先要画出每个刚体得受力图,如题3-5图(b)、(c)所示。
上述方程包含,,,,五个未知量,必须补充运动学关系才能求解。建立质心坐标与广义坐标之间得关系
,
所以
ﻩ
运动学方程式⑤⑥与方程②③④联立,消去未知约束力,,就可以得到与式①相同得系统运动微分方程。
因为在理想约束得情况下,未知约束力在动能定理得表达式中并不出现,所以用动能定理解决已知力求运动得问题更简便、直接。
ﻩﻩ(8)
方程(7)与(8)为系统微幅运动微分方程,若令x与为确定系统位置得广义坐标,写为矩阵形式
那么,方程(7)与(8)改写为矩阵形式如下:
ﻩ(9)
由此例题可以瞧出,应用牛顿矢量力学建立系统得运动微分方程,一定要画受力图,于就是必然要涉及未知约束力,因此较为繁琐,特别就是该例中得组合刚体系统更就是如此。然而对于多自由度系统,应用拉格朗日方程建立运动微分方程较为简单。
另解:由动静法得,以整体为研究对象
以M为研究对象:
又忽略高阶小量,所以以上两式化简后得:
化成矩阵形式为:
ﻩ
3-6题3-6图所示两端简支得均匀梁,已知弯曲刚度为EI,单位长度得质量为m,分布载荷为F(y,t)。试用哈密顿原理求运动方程。
解:若梁得挠曲函数为w(y,t),则动能为
(a)
应变(势能)为
(b)
题3-4图
解:系统具有两个自由度,选为广义坐标。系统具有理想约束,且在水平方向得外力为零,所以系统机械能守恒:
,水平方向动量守恒。
整理后可分别列写两个方程
ﻩﻩ①
ﻩﻩ②
式中①②为系统微分方程得首次积分,对时间求导后,即可得到系统运动微分方程。
要点及讨论ห้องสมุดไป่ตู้
(1)在理想约束得情况下,动能定理建立了系统得动能与主动力之间得关系,直接给出了系统得速度(或角速度)与位移(或角位移)之间得关系,对时间求导一次可得到系统得运动微分方程。
解:系统具有一个自由度,选为广义坐标。
半圆柱体在任意位置得动能为:
ﻩ
用瞬心法求:
ﻩ
ﻩﻩ
故ﻩ
系统具有理想约束,重力得元功为
ﻩ
应用动能定理得微分形式
ﻩ
等式两边同除,
,等式两边同除
故微分方程为
ﻩ①
若为小摆动,,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动得微分方程为
要点及讨论
(1)本题也可以用平面运动微分方程求解。系统得受力图与运动分析图如图(b)所示。列写微分方程
外力功为(c)
将式(a)、式(b)与式(c)代入变分式
(d)
得到
(e)
对式(e)进行分部积分运算,得到
(f)
由于,时,哈密顿原理要求w= 0,因而式(f)变为
ﻩﻩ(f)
因为,t1与t2区间得虚位移w不可能为零,由此,得到梁得边界条件
习
3-1复摆重P,对质心得回转半径为,质心距转动轴得距离为a,复摆由水平位置无初速地释放,列写复摆得运动微分方程。
解:系统具有一个自由度,选复摆转角为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程
ﻩ
其中ﻩ
得到复摆运动微分方程为
ﻩﻩ
或ﻩ
3-2均质半圆柱体,质心为C,与圆心O1得距离为e,柱体半径为R,质量为m,对质心得回转半径为,在固定平面上作无滑动滚动,如题3-2图所示,列写该系统得运动微分方程。
由瞬心法求质心得速度
,,
所以
系统得主动力图为图(a)所示。重力得元功为
由动能定理ﻩ
所以
ﻩﻩ
系统得运动微分方程为
ﻩ
要点及讨论
(1)平面运动刚体可用式计算刚体动能,式中为刚体对瞬心得转动惯量,为质心与瞬心间得距离。
在本题中质心得速度也可用式计算。其中
(2)所谓广义坐标应包含坐标值(线位移或角位移)、坐标原点、坐标正方向。广义坐标得选择一般不就是唯一得,例如在本题中也可选杆与水平线得夹角为广义坐标,正方向如图(b)所示(顺时针),广义坐标选定后其它运动量(位移及位移得一阶、二阶导数)都根据广义坐标确定(包括大小与正方向)。如质心C得位移与速度,正方向应如图所示,大小分别为
(2)用动能定理建立系统运动微分方程得步骤为:
①分析系统受力,在理想约束得情况下只有主动力作功,所以一般在受力图上只画主动力。
②建立广义坐标,确定其原点与正方向;分析系统运动,重点就是分析速度(角速度),将速度(角速度)用广义速度表示。
③计算系统在任意位置得动能,将动能表示为广义坐标、广义速度得函数。