一种连续系统辨识方法及其在飞控规律辨识中的应用
基于MBSE的民机功能需求辨识与确认

0 引 言
正向设计方式,又称顺向工程(forward engineering,FE),不同于逆向工程(reverse engineering,RE)方式,是在工业产品开发中遵循序列严谨的研发流程。其从功能与规格开始,逐次完成每个元件的设计、校验与组装、整机核装。在飞机系统设计领域内,FE具有巨大的优势。在物理架构层面,飞机总体系统涵盖结构力学设计、材料设计、空气动力设计等子系统设计;在功能架构层面,飞机系统由众多的子功能系统构成,如飞行控制系统、飞行管理系统、座舱系统、推力系统和电传电缆系统等。因此,飞机系统的设计需要数量众多的子系统耦合完成,在设计过程中,为了避免不同子系统的需求发生冲突,需要不断地对系统设计方案进行调整直至找到满足需求的最佳设计[2]。另一方面,在RE飞机的复杂高耦合系统时,由于子系统辨识的误差[3]和解耦计算时干扰的不确定性[4],会使设计结果产生偏差。
图7 驾驶员离散操纵序列
Fig.7 Discrete operational sequence of pilot
通过驾驶员离散操纵序列图,将飞机系统在完成紧急复飞这一场景中的功能需求同驾驶员的控制结合,并利用时间序列体现。
至此,完成了在MBSE框架下,对民机在应急复飞用例中的功能需求黑盒活动的分析构建。
1 MBSE方法概述
1.1 复杂系统研发的双V过程
1978年,钱学森提出采用科学的组织管理的方法,并将系统工程的概念进行推广。系统工程即使用科学的方法对系统的设计、制造和试验进行规划,以实现系统最优化。根据国际系统工程学会给出的MBSE的定义为,从概念设计出发,使用建模方法逐次支持系统需求、设计、分析、验证和确认等活动,持续贯穿整个设计生命周期。图1为MBSE中双V字模型(双V分别为Validation和Verification)结合具体的展示,在该图中,V字模型的右边描述了自底向上的系统设计黑盒模型过程,从原始需求文档的分析出发,依此设计分析飞机系统用例分析、黑盒功能设计活动图、黑盒功能序列图。V字模型的左侧是根据驾驶员的离散时间操纵序列,从而将黑盒模型解析转换为白盒模型,对系统的功能模型进行验证,根据白盒模型完善需求覆盖表,确认新需求的有效性,验证新增需求的完备性和合理性,最终完成飞机系统的正向综合设计。
稳定平台中陀螺漂移自适应实时估计算法_张智永

9] 图 2 陀螺稳定平台伺服控制系统结构 [
r o l a t f o r m9 F i . 2 S t r u c t u r e o f s e r v o c o n t r o l s s t e m o f s t a b i l i z e d - - g y p g y
[ ] 3 7 -
, 进行了广泛的研究并取得一定的效
果 。 但就稳定平 台 漂 移 补 偿 而 言 , 还存在如下问 题: 如 低 通 滤 波、 卡尔曼滤 ① 各类信号处理手段, 波、 前向线性预测滤波( F o r w a r d L i n e a r P r e d i c - , 、 小 波 滤 波, 均是抑制陀螺噪声 t i o n F i l t e r F L P) , 的中高频信号 对补偿陀螺常值漂移作用不大 ; ② 从短期来看 , 陀螺常值漂移为固定随机数 , 但长期
。 陀螺作为稳定平台核心测量元件 , 其误
差对平台性能有 很 大 影 响 , 如陀螺常值漂移会造 陀螺相关漂移会 成平台漂移随时 间 呈 线 性 增 长 , 造成平台漂移的随机游走 。 而平台漂移会带来图 像的 扰 动 , 进而造成目标搜索、 捕 获、 跟踪和瞄准 因此必须对陀螺误差进行补偿 。 的困难 , 国内外专家学 者 针 对 陀 螺 误 差 的 分 析 、 建模 和补偿
J u n . 2 5 2 0 1 2V o l . 3 3N o . 6 1 0 4 4 1 0 5 1 - / I S S N 1 0 0 0 6 8 9 3 N 1 1 1 9 2 9 V - C -
稳定平台中陀螺漂移自适应实时估计算法
张智永 * ,周晓尧 ,范大鹏
国防科学技术大学 机电工程与自动化学院 ,湖南 长沙 4 1 0 0 7 3
飞行控制系统辨识的神经网络方法研究与仿真
行控 制 系统 , 为提 高识 别 精 度 , 出一 种 改 进 的 混 合 共 轭 梯 度 算 法 对 B 提 P神 经 网 络 各 层 问 的 连 接 权 值 进 行 训 练 , 利 用 训 练 并
HUANG h —y ,ZHANG e - u Z i i W i g o,GU e , L U a -x o g W i I Xio i n
( ol eo uo ai , otw s r P l ehia U iesy X ’n ,10 2C ia C l g f t t n N r et n o t ncl n ri , ia 7 0 7 hn ) e A m o h e ye v t
确辨识 , 文献 [ ] 用在线学 习 R F神经 网络 进行 复杂非线 3使 B
关 键 词 : 经 网络 ; 合 共 轭 梯 度 ; 型 辨 识 ; 行 控 制 系 统 神 混 模 飞 中图 分 类 号 :2 V4 文 献 标 识码 : A
A e ho f BP ur lNe wo k I ntfc to m t do Ne a t r de i a i n i f r Fl ht Co r lS s e s o i nt o y t m g
s yst em
1 引 言
系统 辨 识 是一 个优 化 问 题 , 确 的 辨 识 模 型 可 以用 于 控 精 制器 设 计 、 制 系 统 预 测 和 监 控 。多 年 来 , 于 线 性 、 时 变 控 对 非
一种连续系统辨识方法及其在飞控规律辨识中的应用
第3卷第5期空 军 工 程 大 学 学 报(自然科学版)Vol.3No.5 2002年10月J OUR NAL OF AIR FOR CE ENGINEERING UNIVERSITY(NATURAL SCIENCE EDI TION)Oct.2002一种连续系统辨识方法及其在飞控规律辨识中的应用吴 剑, 孙秀霞(空军工程大学工程学院,陕西西安 710038)摘 要:针对某型飞机控制系统的规律辨识问题,对文献[2,3\ 提出的连续系统辨识方法进行了改进,给出了该方法可以适用的辨识对象的一般模型,同时通过对误差模型和极小化指标的改进,把原方法推广至时变参数辨识领域。
数值仿真结果表明该方法成功的解决了该飞控系统的辨识问题。
该方法还很容易推广到一类具有相同特征的线性、非线性、时变或时不变的参数辨识中。
关键词:飞控系统;连续系统辨识;跟踪-微分器;扩张状态观测器;时变参数中图分类号:V24 文献标识码:A 文章编号:1009-3516(2002)05-0004-05在某型飞机的控制系统中,大量采用了分段线性的非线性环节,这一类环节参数的变化一般受到动压信号和静压信号的控制,用以保证飞控系统的控制规律随着飞机的高度和速度的变化而变化。
对这种变化规律进行辨识,一种方法是固定静压和动压信号,使辨识对象转化为线性时不变系统,然后再采用常规的辨识方法进行辨识。
其缺点是辨识的次数多,数据采集与处理的工作量大,准确性差。
另一种方法是,在一次数据采集的过程中,固定静压信号,连续调节动压信号,使之取遍整个取值范围。
这时,进行一次或较少的几次辨识,就可以得出被辨识参数在当前静压下的变化规律。
由于动压连续变化,被辨识参数也连续变化,这时的辨识对象实际上是一个时变系统,需要考虑时变参数的辨识问题。
由于被辨识对象的控制规律本身是连续的,对于连续系统采用离散的辨识方法会存在一些问题[1],例如,如果离散系统的延迟不是采样时间的整数倍,则获得的离散模型可能具有非最小相位特性等等。
毕业设计(论文)-无人机飞行控制仿真系统研究
无人机飞行姿态稳定控制系统研究摘要随着无人机在军民两用领域越来越多地发挥重要作用,无人机研究也越来越多地得到世界各国的普遍重视。
自动飞行控制系统作为无人机的控制核心,是无人机研究的重点和热点问题。
本文以某型固定翼无人机为研究对象,主要研究了基于常规PID的无人机横侧向飞行控制律的设计问题。
首先,建立了无人机的六自由度数学模型,并运用小扰动线性化方法建立了无人机纵向与横侧向系统的线性化方程;其次,介绍了一些常用的PID控制器参数整定法,作为飞行控制律设计的理论基础;再次,采用常规PID的方法进行了横侧向系统控制的设计,并针对不同空域的一些典型的状态点进行了大量的仿真研究。
仿真结果表明,我们所设计的常规PID控制器在多数情况下能满足要求。
关键字:无人机,常规PID,飞行控制率,滚转角,仿真UA V’s(Unmanned Aerial Vehicle)flight attitude stability controlsystem researchABSTRACTWith the UAV in the field of military and civilian use more and more important role to play, UAV study countries in the world more and more widespread attention. Automatic flight control system as the core of UAV control is the focus of UAV research and hot topics.Based on a high state technical issue as the research background, taking a unmanned aerial vehicle for research object, mainly studies based on the classical PID unmanned aerial vehicle flying control law design problem. First, Six degrees of freedom to establish a mathematical model of the UAV, and the use of small perturbation linearization method to establish a UAV system, the longitudinal and lateral linear equations; Secondly, the introduction of some commonly used PID Controller Parameters Tuning, flight control law design as the theoretical basis; Again, conventional PID lateral approach to the design of system control, and airspace for a number of different points of the typical state of a large number of simulation. Simulation results show that our conventional PID controller design in most cases to meet the requirements.KEY WORDS:unmanned aerial vehicle,classic PID,flight control law,rolling angle,simulation目录摘要 (1)ABSTRACT (2)1绪论 (5)1.1概述 (5)1.2无人机的发展历程 (6)1.3无人机的发展趋势以及对自主控制的要求 (6)1.4本文主要研究内容 (8)2无人机模型与方程的建立 (10)2.1飞机的简介 (10)2.2 常用坐标系简介 (11)2.2.1 地面坐标系AXdYdZd (11)2.2.2机体坐标系 OXtYtZt (11)2.2.3速度坐标系(气流坐标系)OXqYqZq (12)2.3飞机的常用运动参数 (12)2.3.1姿态角 (12)2.3.2向量与机体坐标系的关系 (13)2.3.3飞机速度向量与机体坐标系的关系 (13)2.3.4控制量与被控量 (13)2.4前苏联体制下无人机的非线性运动方程组 (13)2.4.1无人机六自由度运动方程式的建立 (14)2.4.2无人机六自由度全面运动方程式的简化处理 (16)2.4.3无人机数学模型的配平及线性化 (17)2.5本章小结 (18)3 PID控制研究 (20)3.1常规PID控制 (20)3.2常规PID控制器参数整定方法 (22)3.2.1临界比例度法 (22)3.2.2衰减曲线法 (23)3.2.3基于相角裕度的整定方法 (23)3.3本章小结 (24)4无人机横侧向系统控制律的设计与仿真 (25)4.1无人机飞控系统基本原理概述 (25)4.1.1飞控系统的硬件结构 (25)4.1.2飞控系统设计的基本思路 (25)4.2无人机横侧向控制系统的基本结构 (27)4.3倾斜姿态保持/控制模态控制律的设计与仿真 (28)4.3.1滚转角控制律的设计 (28)4.3.2滚转角控制律的仿真 (32)4.4航向保持/控制模态控制律的设计与仿真 (34)4.4.1控制结构与控制策略 (35)4.4.2控制律的设计与仿真 (36)4.5本章小结 (37)致谢 (38)参考文献 (39)附录Ⅰ飞机六自由度运动方程式的建立过程 (41)Ⅰ.1 动力学方程组的推导(锁定舵面) (41)Ⅰ.2 运动学方程组的建立 (44)Ⅰ.2.1 角位置运动学方程组 (44)Ⅰ.2.2 线位置运动学方程组 (45)附录Ⅱ无人机各状态点处的横侧向运动线性化方程 (46)1绪论1.1概述自古以来,人类就向往在空中自由地飞翔,许多神话故事和历史文献中都有描述与记载,嫦娥奔月这个神话故事正是人们对飞向天空的向往。
一种采用变周期调频连续波雷达的多目标识别方法

种 采 用 变 周 期 的 线 性 调 频 波 形 作 为 发 射 波 形 的 新 方 法 , 而解 决 了多 目标 识 别 中 的 虚 假 目标 的 问 题 . 算 机 模 拟 证 从 计
明 丁理 论 分 析 的 正 确 性 和 新 方 法 的 可 行 性 . 后 , 对 这 种 体 制 雷 达 探 测 系 统 的 新 特 点 , 出 厂一 种 适 用 于 该 系 统 的 最 针 提
以 得 到 距 离 和 速 度 . 常 , 用 傅 立 叶 变换 来 得 到 差 拍 信 号 的 通 采
频谱 . 通过频谱 分析得到 : 即 厶 = +( B T , = 2/ )
离和速 度值 .
一( B T 厂 2 / )n
() 3
航空器飞行控制系统的参数辨识及鲁棒性分析研究
航空器飞行控制系统的参数辨识及鲁棒性分析研究引言:航空器飞行控制系统是保障飞行安全和航空器性能的核心部分。
为了确保航空器的稳定性和安全性,对飞行控制系统进行参数辨识和鲁棒性分析研究至关重要。
本文将介绍航空器飞行控制系统的参数辨识方法和鲁棒性分析技术,并探讨其在实际航空器中的应用。
一、航空器飞行控制系统参数辨识航空器飞行控制系统中,各个组件的参数辨识是评估系统性能和进行系统优化的基础。
参数辨识的目标是通过分析系统的输入输出数据,确定系统的数学模型和参数。
常用的参数辨识方法包括最小二乘法、极大似然估计法、系统辨识法等。
1. 最小二乘法最小二乘法是一种常用的参数辨识方法,通过最小化观测数据与系统模型之间的差异,得到系统的最优参数估计。
该方法适用于线性系统和非线性系统。
在航空器飞行控制系统中,可以利用最小二乘法获取系统模型的参数,从而进行进一步的分析和优化。
2. 极大似然估计法极大似然估计法是一种统计学方法,用于从给定的观测数据中确定参数的估计值。
该方法假设观测数据来自于某个已知分布的概率模型,通过最大化似然函数来确定参数的估计值。
在航空器飞行控制系统中,可以利用极大似然估计法来辨识系统的参数,进一步研究系统的性能和鲁棒性。
3. 系统辨识法系统辨识是一种利用观测数据研究系统特性的方法,主要通过整个系统的输入输出关系,以及系统的输入信号和输出信号之间的变换关系,来确定系统的模型和参数。
在航空器飞行控制系统中,系统辨识方法可以用于获取控制系统的状态空间模型和参数,从而进行系统的分析和验证。
二、航空器飞行控制系统鲁棒性分析航空器飞行控制系统的鲁棒性是指控制系统在面对不确定性时的性能稳定性和健壮性。
由于飞行环境和外界干扰的不确定性,飞行控制系统需要具备一定的鲁棒性,以更好地适应不同的飞行条件。
鲁棒性分析可以检验系统对参数误差、外部干扰和动力学模型变化等不确定性的抗扰能力。
1. 不确定性建模在进行鲁棒性分析之前,需要对不确定性进行建模。
旋翼飞行器飞行动力学系统辨识建模算法

S s e I ntf c t o o lng o t r r f i h e ha c y t m de ii a i n M de i f Ro o c a tFlg t M c ni s
So g n o,Su a n Ya gu nT o ( ce c n c n lg nRoo c atAe o c a iSLa o a o y,Na j g Unv r i fAe o a t s S in e a d Te h oo yo t rr f r me h nC b r tr ni ie st o r n u i n y c
△ a 0
△ 1 a
最 直接 的后 果 就 是会 导 致辨 识 中很难 求 得 一 组最
优参 数 , 往往会 因出现局 部极 小等 现象 而导致 辨识 失 败 。 给直 升机 飞行力 学模 型 的辨识 带来 了很 大 这
一
△b 1
的不 利影 响 。 如果 利用机 理建 模和 工程 经验来 确定 模 型 的阶次 、 结构 、 参数 分布 、 变化 规律 以及 一切 能
& Asr n u is to a t ,Na j g 1 0 6,Chn c ni ,2 0 1 n ia)
Ab t a t Ba e n c s r c : s d o ommon c ar c e itc f r o c a t fi c n c o lng,t e re a d a g — h a t rs is o ot r : f lght me ha i s m de i r h o is n l o
m e h0 t d
2 O世 纪 8 0年代 , 欧洲 的航 天研 究 和发 展 咨询
委 员会 成 立 了研 究 机 构 , 为高 带 宽 飞控 系 统 设 计 、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种连续系统辨识方法及其在飞控规律辨识中的应用摘要: 针对某型飞机控制系统的规律辨识问题, 对文献[ 2, 3]提出的连续系统辨识方法进行了改进, 给出了该方法可以适用的辨识对象的一般模型, 同时通过对误差模型和极小化指标的改进,把原方法推广至时变参数辨识领域。
数值仿真结果表明该方法成功的解决了该飞控系统的辨识问题。
该方法还很容易推广到一类具有相同特征的线性、非线性、时变或时不变的参数辨识中。
关键词: 飞控系统; 连续系统辨识; 跟踪- 微分器; 扩张状态观测器; 时变参数在某型飞机的控制系统中, 大量采用了分段线性的非线性环节, 这一类环节参数的变化一般受到动压信号和静压信号的控制, 用以保证飞控系统的控制规律随着飞机的高度和速度的变化而变化。
对这种变化规律进行辨识, 一种方法是固定静压和动压信号, 使辨识对象转化为线性时不变系统, 然后再采用常规的辨识方法进行辨识。
其缺点是辨识的次数多, 数据采集与处理的工作量大, 准确性差。
另一种方法是, 在一次数据采集的过程中, 固定静压信号, 连续调节动压信号, 使之取遍整个取值范围。
这时, 进行一次或较少的几次辨识, 就可以得出被辨识参数在当前静压下的变化规律。
由于动压连续变化, 被辨识参数也连续变化, 这时的辨识对象实际上是一个时变系统, 需要考虑时变参数的辨识问题。
由于被辨识对象的控制规律本身是连续的, 对于连续系统采用离散的辨识方法会存在一些问题[1] , 例如, 如果离散系统的延迟不是采样时间的整数倍, 则获得的离散模型可能具有非最小相位特性等等。
而采用连续的辨识方法则可以较好的解决这样的问题。
文献[ 2, 3] 提出了一种基于跟踪- 微分器(TD) 和扩张状态观测器( ESO) 的连续系统辨识方法, 用来解决一些非线性时不变系统的辨识问题。
在实际应用中, 我们对文献[ 2, 3] 提出的方法进行适当修改, 并适当选择辨识对象的模型和被辨识参数,就可以把这种方法推广至时变参数辨识领域, 从而可以用来解决飞行控制系统的辨识问题。
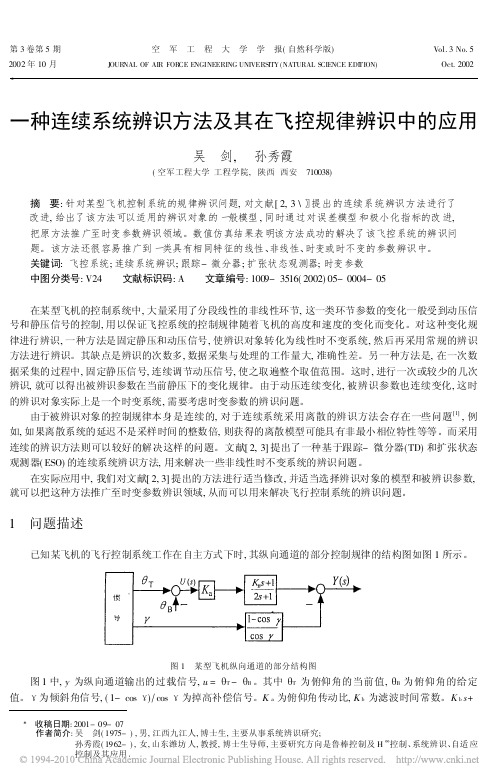
1 问题描述已知某飞机的飞行控制系统工作在自主方式下时, 其纵向通道的部分控制规律的结构图如图1 所示。
图1 某型飞机纵向通道的部分结构图图1 中, y 为纵向通道输出的过载信号, K a 为俯仰角传动比, K b 为滤波时间常数。
用于滤除高频干扰信号。
K a 和K b 为待辨识参数。
K a 和K b 都是动压q cx 的分段线性化函数。
K a 和K b 按照图2 所示规律变化。
图2 中, q cx 为动压信号, P 为静压信号。
由图可知, K a 和K b 随动压和静压在不同的段内线性变化。
当动压和静压都固定时, 此时的系统相当于一个线性时不变系统。
此时的辨识需要进行多次数据采集才能获知整个变化规律。
当静压固定, 动压随时间变化时, K a 和K b 也会随时间变化, 此时的系统为一个时变系统。
如果能采用时变系统辨识的方法, 那么进行一次辨识就可以得出参数在当前静压下的变化规律。
图2 K a 和K b 的变化规律2 问题的建模由于在K a 和K b 变化的每个线性段内, 斜率和截距都保持不一个线性段内可设:K a= aq+ bK b= cq+ d( 3)设T = ( q ) = ( a, b , c, d ) , 为待辨识参数, 它随q 在不同的变化段内取不同的固定值。
由式( 2) ~ ( 3) 有y + 2y= ( aq+ b) [ ( cq+ d) u+ u] = hf ( 4)其中:h T = ( a, b, ac, bd, ad+ bc) ( 5)f T = F( u, y , q ) = ( qu, uqu !, u, qu) ( 6)h 为待辨识参数的各个分量的函数, 与系统的输入输出u, y 及q 无关。
而f 仅与系统的u, y 和q 有关,与无关。
等式左边仅与u, y 有关, 与q 和无关。
可以看出, 式( 4) 具有文献[ 2, 3] 中所解决问题类似的典型形式, 即可以实现被辨识参数和系统输入、输出u , y 的分离。
可以想象, 只要参数a, b, c, d 在辨识过程中分段稳定, 那么由系统的输入u ( t ) 和输出和y ( t ) 就可以辨识出该段对应的a, b , c, d 值。
为此, 对文献[ 2, 3] 的方法的进行改进。
3 对基于跟踪- 微分器和扩张状态观测器的连续系统辨识方法的改进3. 1 辨识模型在文献[ 2, 3] 所提出方法的基础上, 可以归纳出文献[ 2, 3] 所提出的方法的一般模型为g ( Y, U) = h T[ ( q) ] !f ( Y, U) + e( t ) ( 7)其中, Y 是系统输出y 及其各阶导数组成的向量, U 是系统输入u 及其各阶导数组成的量。
Y 和U可以由y 、u 的测量值经跟踪- 微分器[ 4~ 6] 等状态观测器处理后得出, 记为Y和U∀。
g( !) 及f ( !) 是已知函数。
是待辨识参数组成的向量, q 是外部的控制信号( 如本文前述的动压和静压信号) 。
是q 的函数, h( ) 是的函数。
e( t ) 为噪声。
这种模型的特征是: 在模型的数学表达上, 可以实现被辨识参数和输入输出信号的分离。
式( 7) 实际上是一种最小二乘形式。
由于其中的函数g( !) 和函数f ( !) 几乎可以为任意形式的非线性函数, 因此, 任何非线性系统, 只要可以建立符合该式的模型, 都可以考虑采用本文所论述的方法来进行辨识。
文献[ 6] 在对非线性参数估计的方法进行论述时, 提出的几个例子符合这种形式, 就可以考虑采用本文所述的方法来进行辨识。
从式( 4) 可以看出, 本文的辨识对象的模型也具有式( 7) 所对应的形式, 同时从式( 3) 可以看出, 被辨识参数随着动压连续变化, 在不同的时间段内为不同的常值。
所以在采用最小二乘法求解的过程中, 对文献[ 2,3] 所提出的方法做如下修改。
3. 2优化指标的选择为了简便起见, 可以把式( 7) 简写为如下形式:g = h T!f ( 8)g∀= g( Y, U, t )f= f ( Y, U, t )( 9)式中: WTHX g∀、f∀分别为函数g ( !) 和f ( !) 的估计。
取方程式误差( equation error) [ 2]e= g∀- g , 考虑到参数时变, 加入遗忘因子和所限定记忆的时间长度!, 取极小化指标. 4数值仿真结果若所得的辨识参数为T = ( a, b, c, d) 。
由( 14) 式可知, 的真值的变化规律见式( 15) 。
由式( 5) , h 的真值的变化规律见式( 16) 。
4. 1 分段辨识令入 = 1, ! = t , 此时即可进行分段辨识。
参数收敛曲线如图3 所示。
由图3 可知在0~ 20 s 内h( ) 快速收敛至真值( 2, 1, 0, 2, 4) 附近查寻数据, 可得t=15 s 时h=( 2.000, 1.395, 0.001, 1.994 4, 3.999 9) 。
其中第二项误差较大, 这是因为跟踪- 微分器的误差而产生的稳态误差。
可以通过降低信号的坡度从而降低辨识对象输出信号的变化速度来提高跟踪- 微分器的跟踪精度。
如果取q= 0.01t , 其它参数保持不变, 重新进行辨识。
在t= 10 s 时有: h= ( 2.000, 1.039 6, 0.001 9, 1.9944, 3.999 8) 。
从图3 中还可以看出在t= 20 s 以后h的收敛曲线都发生了异常的波动, 可以断定在t= 20附近K a 和K b 进入了另一个线性区。
即q= 0. 1t | t= 20= 2 在第一个转折点的附近。
图3对第一个线性段的辨识结果图4对第二个线性段的辨识结果由第一次辨识所给出的转折点的信息, 取q= 01t+ 2 , u= 2 sin 10t , 其它参数设置同前。
把q 的起始段定在第一次辨识得到的转折点后, 重新开始辨识, 又可得出新的线性段内的参数估计值和下一个转折点的信息, 结果见图4。
如此重复, 直到辨识结果中看不到转折点, 这样可得到全部线性区内的参数。
以上对转折点的辨识还是粗略的估计, 在已知所有线性段的参数值后, 还可以反过来求各段的交点, 得出转折点的精确值。
这种方法的优点是可以同时辨识所有待辨识的参数, 精度高, 抗干扰能力强, 缺点是仍需分多次辨识。
4. 2带遗忘因子或限定记忆的方法可以不必分段, 一次就得出辨识结果。
图5 为限定记忆时间长度为10 s, 对h 的元素a、b 和ac 的辨识结果。
图6 为对元素bd 和ad+ bc 的辨识结果。
带遗忘因子的辨识方法可以得到同样的结果, 但要注意选择遗忘因子, 否则会降低辨识精度, 遗忘因子的选择没有精确规律, 需要反复试凑。
图5 中, a 在各个线性段内的真值为: 2, 1, 1。
当t= 15, 35, 60 s 时, a 的估计值分别为: 2. 000, 0. 913 4,1. 003 7。
b 在各个线性段内的真值为: 1, 3, 3。
当t= 15, 35, 60 s 时, b 的估计值为: 1.3995, 3.1203, 3.109 3。
ac 在各个线性段内的真值为: 0, - 0. 5, 0。
当t= 15, 35, 60 s 时, ac 的估计值为: 0. 000 0, - 0. 499 8, 0. 000 0。
图6 中, bc 在各个线性段内的真值为: 2, 9, 3。
当t= 15, 35, 60 s 时, 其估计值为: 1. 994 3, 8. 996 9, 2. 9996。
ad+ bc 在各个线性段内的真值为: 4, 1. 5, 1。
当t= 15, 35, 60 s 时, 其估计值为: 4. 000, 1. 501 6, 1. 000 0。
从图5~ 图6 可以清楚地看出参数随时间的变化规律, 同时可以看出, 辨识结果与真值非常接近。
5 结论本文是对文献[ 2, 3] 方法的改进, 给出了这种方法可以解决问题的一般模型, 同时通过适当选择极小化指标和误差模型, 把该方法推广至时变参数辨识领域。
在此基础上, 把这种方法用于某型飞机的飞行控系统控制规律辨识, 数值仿真结果证明辨识精度高, 结果可靠。
这种方法对于其它符合式( 5) 的时变、非时变、线性、非线性模型的辨识问题都有参考价值。
参考文献:[ 1] UNBEHAUEN H, RAOS G P. Continuous- time approaches to system identification- A survey[ J] . Automatica, 1990, 26( 1) : 23- 35[ 2] 张文革, 韩京清跟踪- 微分器用于连续系统辨识[ J]控制与决策, 1999, 14( S0) : 557- 560[ 3] 黄远灿, 韩京清扩张状态观测器用于连续系统辨识[ J]控制与决策, 1998, 13( 4) : 381- 384[ 4] 韩京清, 王伟非线性跟踪- 微分器[ J]系统科学与数学, 1994, 14( 2) : 177- 183 [ 5] 韩京清一种新型控制器& & & NLPID[ J]控制与决策, 1994, 9( 6) : 401- 407[ 6] 朱全民非线性系统辨识[ J]控制理论与应用, 1994, 11( 6) : 641- 652[ 7] 韩曾晋自适应控制[M]北京: 清华大学出版社, 1995[ 8] 方崇智过程辩识[M]北京: 清华大学出版社, 1988。