MapMatrix数码相机影像畸变差去除工具使用说明书
MapMatrix3D用户手册

第一章概述1.1简介MapMatrix3D是一个独立的三维场景浏览器,能够导入多种三维数据格式(包括OSGB和OBJ), 缩放,旋转,移动的方式浏览场景,在场景中进行位置,长度,面积,角度等的量测操作(支持量测场景投影面积和场景表面距离)。
同时能够对自动三维建模生成的OSGB场景进行快速定向和编辑处理,每个场景只由一个作业员编辑,无需协同作业。
基于控制点的绝对定向精度可以达到厘米级别,经过绝对定向后,多场景可以进行裁剪和补空洞,补物体的编辑操作,拼接合并为一个大场景。
最后可以利用编辑后的大场景生成DOM和DEM。
1.2主要特征高精度定向✓模型精度达到厘米级4D数据产品制作✓无需人工编辑干预广泛的模型数据支持✓倾斜摄影自动建模✓人工建模✓LOD数据第二章操作说明2.1启动程序电脑桌面上单击MapMatrix3D程序的图标打开程序的主界面如下:图2-1主界面2.2漫游浏览1)数据导入:Osgb 格式图2-2-1 Osg格式图2-2-22)打开场景:点击按钮打开场景,选择需要打开的文件:图2-2-3 打开场景按下鼠标左键,然后拖动,可以旋转场景,按下鼠标中键,拖动,移动场景。
图2-2-4 浏览场景3)滑动滚轮放大和缩小场景4)按住中键,拖动场景2.3测量1)点测量:点击点测量,把鼠标移动到需要测量的地方,坐标显示在方框中:图2-3-1 点测量2)线测量:方法同上:图2-3-2 线测量3)面积测量方法同上:图2-3-3 面测量2.4裁切1)点击精确裁切,选择需要裁切的区域,双击结束, 点击输出场景选择新的目录,并重新命名索引:图2-4-1 精确裁切2)挖空裁切:点击挖空,方法同上,点击输出场景:图2-4-2 挖空3)用截屏方法先把纹理保存成jpg格式,点击补空洞按钮,绘制需要补空洞范围,选择纹理:图2-4-3 补空洞2.5定向拼接1)点击自动置平:模型从倾斜模型变成水平形态:图2-5-1 置平2)绝对定向:刺点功能(模型获得绝对坐标)控制点格式为第一行是控制点个数第二行到最后一行,第一列是点号,第二列是纬度平面坐标(需把经纬度投影成平面坐标),第三列是经度平面坐标,第四列是高程坐标点击加载控制点加载控制点文件,点击控制点号选择控制点:图2-5-2 绝对定向刺点完成后,点击计算七参数生成精度报告,点击绝对定向对模型进行定向,生成带坐标的模型。
MapMatrix3D用户手册
MapMatrix3D用户手册版权声明Visiontek公司版权所有©2005-2016年。
保留所有权利。
本手册由Visiontek公司发行。
未经Visiontek公司书面授权,任何单位组织和个人不得以任何形式在任何载体上使用本手册内容的任何部分或全部。
MapMatrix3D的版权归Visiontek公司所有。
Microsoft Windows是Microsoft公司的商标。
Core是Intel公司的商标。
本书中涉及的其他软件及商标均由其合法拥有者拥有版权和商标权。
目录目录 (2)第一章MapMatrix3D概述 (4)1.1系统特征 (4)1.2主要功能 (4)1.3运行环境 (4)1.4启动MapMatrix3D (5)第二章工作流程 (5)2.1概述 (5)2.2生产流程图 (6)第三章加密狗安装 (6)第四章主界面介绍 (9)4.1界面布局 (9)4.2主界面菜单和工具 (9)4.3文件视图窗口 (10)4.4主作业窗口 (10)第五章场景浏览 (11)第六章工程管理 (14)6.1新建场景工程文件 (15)6.2加载场景 (16)6.3输出场景 (17)6.4定向拼接 (18)6.4.1自动置平 (18)6.4.2镜像 (19)6.4.3颠倒 (19)6.4.4绝对定向 (20)6.4.5模型匹配 (24)6.4.6场景拼接 (25)6.4.7场景拆分 (28)6.5测量 (29)6.5.1点测量 (29)6.5.2线测量 (30)6.5.3多线测量 (30)6.5.4面积测量 (30)6.6场景编辑 (31)6.6.1范围裁剪 (31)6.6.2挖空 (33)6.6.3悬空物裁切 (35)6.6.4高度裁切 (36)6.6.5补空洞 (37)6.6.7块清除 (39)6.7测图 (40)6.7.1DOM生成 (40)6.7.2DSM生成 (41)6.7.3提取剖面线 (42)6.7.4提取轮廓线 (43)6.7.5手动划线 (43)6.7.6矩形框选 (43)6.7.7多边形选择 (44)6.7.8点选 (45)6.7.9矢量输出 (46)第七章MapMatrix3D缺省快捷键列表 (46)第一章MapMatrix3D概述航天远景MapMatrix3D图阵三维智能测图系统是一款基于倾斜三维模型的智能化测图系统。
MapMatrix与EPT结合制作正摄影像流程
MapMatrix与EPT结合制作正摄影像的流程中图分类号: j4 文献标识码: a 文章编号:mapmatrix系统是基于航空,卫星遥感,外业等数据进行多源空间信息综合处理的集成工具。
是数据的采集、处理、编辑、入库、维护和更新等空间地理信息数据处理的整体解决方案。
一 dom的制作1 创建工程单击主界面工程浏览窗口上的添加按钮, 选择一个存放项目文件的文件夹,然后单击确定按钮,系统将在文件夹下建立一个目录结构,用来存放数据处理过程文档。
同时系统自动在mapmatrix 程序所在盘中project目录下建立一个后缀为*.xml的一个工程文件。
鼠标左键单击加载此工程. 载入相机数据*.mdl2 控制点及相机文件编辑建立工程之后,即可进行控制点编辑工作. 选择需要进行处理的立体像对,在工程文件浏览器上单击控制点编辑图标在此控制点编辑对话框中,您可以对控制点进行添加、删除、保存、查找、坐标转换(x, y, z方向上互换)等操作。
如果需要对相机文件进行编辑,您可以单击工程浏览器中的工程名节点进行编辑.3 内定向影像加载完成后就可以开始进行内定向处理了。
内定向过程有三种方式:全自动内定向,批处理内定向和手动内定向。
在工程浏览器中选中需要进行内定向的影像,然后单击该窗口上的内定向图标,系统自动进行内定向,在输出窗口显示内定向状态和结果,可以手动修改进行微整。
在右方的属性信息栏中可以对内定向参数进行修改。
4 相对定向将需要用来创建立体像对的影像选中后单击鼠标右键,在弹出的菜单中选中创建立体像对选项即可.单击需要进行相对定向处理的一个立体像对,系统将根据定义的范围进行自动匹配,完成后选中不符合要求的点进行编辑.5 绝对定向相对定向完成后,您需要在此立体像对上添加至少3对控制点,然后再进行绝对定向。
在影像工具窗口中对左右影像上的控制点点位分别进行精确调整,再到中文本编辑框中输入对应的控制点点号,控制点添加完成后,在工程浏览器中需要处理的立体像对上单击右键,然后单击绝对定向选项,系统将自动对该立体像对所包含的两张影像进行绝对定向处理。
利用MapMatrix处理P5影像的流程汇总.

整个步骤分为以下几步(请先看完整个操作文档再动手照着操作文档做):只有84坐标系控制点或有84坐标系控制点和本地坐标系控制点的情况检查软件和加密狗的驱动是否正确安装;1.数据准备:数据收集,影像格式转换2.启动软件,确定加密狗是否已插好3.打开MapMatrix,建立工程,并设置工程参数4.加载数据(控制点和影像以及影像对应的RPC参数文件)5.组建立体像对,对立体像对进行置平6.进行RPC空三处理7.进行矢量采集8.进行相对定向,框定核线范围,核线重采样,影像匹配9.创建DEM,生成DEM,拼接DEM,编辑DEM10.基于DEM创建并生成DOM,DOM修复和镶嵌(11.进行矢量采集)详细操作步骤:检查:检查软件和加密狗的驱动是否正确安装:对于软件是否安装了,这个容易判断。
对于加密狗是否正确安装了,可以通过以下步骤检查:插上可以使用的加密狗(加密狗本身没坏),如果是第一次插上加密狗,左下角则会提示“找到新硬件”“正在安装驱动程序”“硬件可以使用了”,则可以肯定加密狗驱动装好了,倘若是提示,请把加密狗拔下重插,如果还是提示“你的硬件驱动仍有问题”,请再次重插,共3---4次,如果还是这样提示的,请重新安装加密狗驱动“senseLock dongle”(在安装光盘里面的Drivers文件夹里可找到)。
如果不是第一次使用加密狗,则可在插上后安下面步骤操作:右键点击“我的电脑”图标-→“属性”-→“硬件”--→“设备管理器”,如图所示:看有没有“智能卡阅读器”,如果有则表明加密狗驱动已经装好,没有则重插,重插3次还是没有,则请重新安装加密狗驱动。
1.数据准备:数据收集:1)影像2)影像对应的RPC参数文件3)控制点文件和对应的点位图影像格式转换:将非标准的转换成标准的格式(8位非压缩的)利用MapMatrix中提供的影像格式转换工具进行转换,在“工具”选项里面添加影像,设置输出路径,点击“处理”即可将非标准格式的影像转换成标准格式的影像。
Mapmatrix教学
全数字化测图培训教案目录一、教学性质 (1)二、教学目标 (1)三、教学内容 (1)四、教学安排 (2)五、教学方法 (3)六、教学纪律 (3)七、考核方式 (3)八、参考文献 (3)九、具体内容 (4)1、摄影测量学基本理论 (4)2、项目数据准备 (10)3、房屋采集教学 (36)4、栅栏围墙采集教学 (40)5、电杆路灯等采集教学 (43)6、道路采集教学 (48)7、水系采集教学 (56)8、地貌采集教学 (61)9、植被采集教学 (64)10、高程点采集教学 (67)11、接边教学 (68)12、全要素采集教学 (69)本次培训内容为航空摄影测量生产的基本技能,是多源地理数据综合处理的重要基础,是空间信息数字化的关键环节。
能否精确高效进行大量不同比例尺的全数字化测图,不仅是衡量一支航测作业团队的重要指标,更直接决定我们能否完成“为客户提供高效、专业、便捷的地理信息服务”的企业使命。
所以,做好本次培训工作,对公司人才储备和企业未来发展影响深远。
二、教学目标通过本次培训,使学员了解测绘学的基础知识和航空摄影测量的基本原理,掌握进行立体测图前数据准备的基本流程,熟练使用Mapmatrix和Feature one等软件进行全数字测图和特征采集工作。
学员应能够形成良好的测图习惯,了解测图的行业标准,并能根据实际生产中提供的数据,进行各种常见大比例尺测图工作。
三、教学内容本培训是全数字测图的重要内容,培训时间共八周。
先讲解摄影测量的基本理论知识以及培训的意义,让学员清晰学习目标,增加学习动力。
随后讲解项目数据的准备工作,开始进入为期五周的房屋、栅栏、围墙、道路、水系、地貌、植被、高程点的采集测图课程。
第六周到第八周进行1:500、1:1000、1:2000的全要素采集教学,让学员将之前所学融会贯通,并进一步接近生产线的实际需求。
注:本表格只对每周内容做宏观规划,教师可以根据实际情况对课时长短和顺序先后做具体调整。
畸变差消除
畸变差纠正
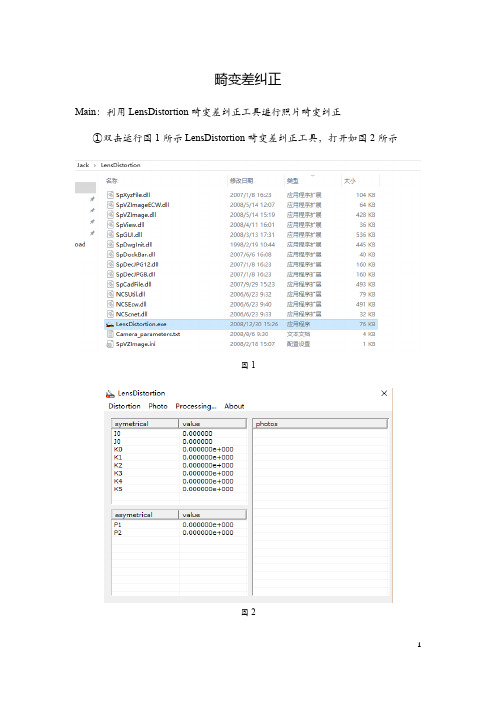
Main:利用LensDistortion畸变差纠正工具进行照片畸变纠正
①双击运行图1所示LensDistortion畸变差纠正工具,打开如图2所示
图1
图2
②相机参数设置,Distortion ->camera parameters,打开如图3所示界面
图3
默认选择像素作为单位,在这里我选择以微米(μm)作为单位,输入像素大小(此处以SONY -α7R为例),接着输入像主点的偏移值,接着输入像幅大小如图4所示:
图4
③输入系统的畸变参数,Distortion ->symmetrical distortion parameters如图5所示:(参数根据具体的参数报告进行输入,没有的话默认为0)
图5
④输入不对称矫正参数,Distortion ->asymmetrical distortion parameters如图6所示:
图6
⑤添加照片,采用拖拽的方式将需要进行畸变差纠正的照片拖拽到Photos的List表内。
如图7所示:
图7
⑥点击进程开始进行纠正,默认纠正照片存放目录为源输入目录。
图8
Design by Jack。
Matlab摄像机标定工具箱的使用说明

摄像机标定工具箱1.1Matlab 摄像机标定工具箱工具箱下载:说明文档:安装:将下载的工具箱文件toolbox_calib.zip 解压缩,将目录toolbox_calib 拷贝到Matlab 的目录下。
采集图像:采集的图像统一命名后,拷贝到toolbox_calib 目录中。
命名规则为基本名和编号,基本名在前,后面直接跟着数字编号。
编号最多为3位十进制数字。
标定模型内参数标定采用的模型如式<1-1>所示,Brown 畸变模型式<1-2>所示。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡11//100011100c c in c c c c ys x y x M z y z x v k u k k v u <1-1> 式中:<u , v >是特征点的图像坐标,<x c , y c , z c >是特征点在摄像机坐标系的坐标,k x 、k y 是焦距归一化成像平面上的成像点坐标到图像坐标的放大系数,k s 是对应于图像坐标u 、v 的摄像机的x 、y 轴之间不垂直带来的耦合放大系数,<u 0, v 0>是光轴中心点的图像坐标即主点坐标,<x c 1, y c 1>是焦距归一化成像平面上的成像点坐标。
k s =αc k x ,αc 是摄像机的实际y 轴与理想y 轴之间的夹角,单位为弧度。
⎪⎩⎪⎨⎧++++++=++++++=1142123654221112124113654221112)2()1()2(2)1(c c c c c c c c c d c c c c c c c c c c d c y x k y r k r k r k r k y y x r k y x k r k r k r k x x <1-2> 式中:<x c 1d , y c 1d >是焦距归一化成像平面上的成像点畸变后的坐标,k c 1是2阶径向畸变系数,k c 2是4阶径向畸变系数,k c 5是6阶径向畸变系数,k c 3、k c 4是切向畸变系数,r 为成像点到摄像机坐标系原点的距离,r 2=x c 12 +y c 12。
无人机解决方案操作手册

无人机数据处理完整解决方案操作手册目录1产品特点 (1)1。
1无人驾驶小飞机项目情况简介 (2)1.2数据处理软件技术指标 (3)1.3硬件设备要求 (3)1。
4处理软件要求 (3)1。
5数据要求 (3)2数据处理操作流程 (4)2.1数据处理流程图 (4)2。
2空三加密 (4)2。
2.1启用软件FlightMatrix (4)2。
2.1。
1创建Flightmatrix工程42.2。
1。
2设置工程选项参数42。
2.1.3自动化处理 (7)2.2。
1.4DA TMatrix交互编辑 (8)2。
2.1.5调用PA TB进行平差解算 (9)2。
3生成DEM、DOM (10)2.4镶嵌成图 (10)2。
4。
1启用软件EPT (10)2。
4。
1.1导入MapMatrix工程生成DOM镶嵌工程122。
4。
1。
2编辑镶嵌线152.5图幅修补 (16)2。
6创建DLG,进行数字测图 (17)1产品特点1)空三加密1.可根据已有航飞POS信息自动建立航线、划分航带,也可手动划分航带。
2.完全摒弃传统航测提点和转点流程,可不依赖POS信息实现全自动快速提点和转点,匹配同影像旋偏角无关,克服了小数码影像排列不规则、俯仰角、旋偏角等特别大的缺点.即使是超过80%区域为水面覆盖,程序依旧能匹配出高重叠度的同名像点,整个测区连接强度高。
3.直接支持数码相机输出的JPG格式或TIF格式,无需格式转换。
4.无需影像预旋转,横排、纵排都可实现自动转点,节约数据准备时间.5.实现畸变改正参数化,方便用户修正畸变改正参数,不需要事先对影像做去畸变即可完成后续4D产品生产。
6.除无人机小数码影像外,还适用于其它航空影像。
7.空三加密支持无外业像控点模式,方便快速制作挂图,满足相关需求。
8.专门针对中国测绘科学研究院二维检校场和武汉大学遥感学院近景实验室三维检校场检校报告格式研发了傻瓜式批处理影像畸变差改正工具,格式对应,检校参数直接填入,无需转换,方便空三成果导入到其他航测软件进行后续处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MapMatrix数码相机影像畸变差去除工具使用说明
1.启动方法
在MapMatrix的bin文件夹中打开ImageCorrect.exe,即可打开MapMatrix数码相机影像畸变差去除工具进行畸变纠正。
如果已经打开了MapMatrix,可直接通过工具—数码相机影像纠正打开该工具。
2.界面说明
打开去畸变工具之后,界面如下:
上图给出的是校正参数以像素为单位,坐标原点为影像左上角的数码相机影像畸变去除工程。
1)坐标及单位定义
若检校参数是以像素为单位则勾选“校正参数以像素为单位选项”,如果校正参数以mm 为单位则不勾选即可。
在以像素为单位的情况下确认待纠正的影像的相机检校文件利用的坐标定义方式,如果是从左下角起算则勾选“像素坐标从左下角起算”选项,如果定义坐标原点为左上角则不选。
在以毫米为单位的情况下,软件默认为影像中心为原点。
校正公式2,应用于某比利时飞机。
一般情况下不勾选。
2)分辨率
dx,dy分别对应x,y方向的扫描分辨率,单位是mm。
3)成像中心
x0,y0分别对应成像中心在定义坐标系中的坐标,若定义以mm为单位,则此时以毫米为单位,将坐标换算到以影像中心为原点的坐标系中,即填入检校文件给出的主点偏移。
若定义以像素为单位,则此时以像素为单位,以左下角(左上角)为原点,检校文件若直接给出成像中心在坐标系中的像素坐标位置,则直接填入,若给出的是偏移的像素数,则加上像幅的一半之后填入。
4)校正参数
注意:建议不要选择“从相机文件中导入参数”,可能会出现导入不全的现象。
手动输入畸变参数时,也要保证参数的单位与之前定义相同。
在相机检校文件中出现的径向畸变系数k0,k1,k2,k3分别对应工具中的k1,k3,k5,k7,偏心畸变系数p1,p2对应工具中的p1,p2,CCD非正方形比例系数α和CCD非正交性畸变系数β分别对应工具中的b1,b2。
注:
k1 k2 k3是径向畸变
p1 p2切向畸变
b1(有的用α来表示),单像元xy方向大小非正型比例
b2(有的用β来表示),ccdxy轴线非正型比例
5)添加影像
选择影像列表的添加影像,将待纠正的影像添加到影像列表。
加入到影像列表中双击选中的影像可以指定输出影像的路径及修改输出影像的名字。
加入影像之后,工具会自动读取影像的大小行列数。
在影像列表框右键,选择“Add Image”可以添加还需校正的影像。
若已选中列表中的情况下,选择“Remove Image”可对不需要校正的影像进行移除,此时若选择“Reverse Camera”可对有相机反转的影像进行修改,将“否”改为“是”。
“Output Path”选项也可指定输出文件夹。
6)网格大小
在影像校正前,可对畸变差去除的采样格网大小进行修改,支持行列15个像素以及30个像素的方式。
采用15个像素格网的方法进行畸变差去除比30个像素格网要精确,一般默认15个像素。
7)畸变去除
设置好上述参数并检查无误后,点击“校正”按钮,即可进行畸变差去除,完成后可在输出文件夹生成校正好的tif和tfw文件。
3.具体使用
下面给出几种常见的相机参数在此工具中相应参数的填法:
1)给出以像素为单位的检校文件,如
此时首先选择“校正参数以像素为单位”和“像素坐标从左下角起算”,填入扫描分辨率d x=d y=0.00606。
x0=3654.6083,y0=2694.4145
k3=0.9,k5=-0.0
p1=0.3,p2=0.5
b1=0.4,b2=0.5
附注其在MapMatrix和DA TMatrix中相机文件的填写方法:
①在MapMatrix中,首先将主点偏移和焦距输入,这时软件默认的单位是mm,因此还需要进行单位的转换
X方向主点偏移=0.00606*(3645.6083-7264/2)=0.082466298
Y方向主点偏移=0.00606*(2694.4145-5440/2)=-0.15504813
焦距=5952.4322*0.00606= 36.071739132
输入之后,默认框标参数,点击畸变差参数进行编辑,输入如下
勾选“参数以像素为单位”,“左下角为原点”
k3=0.9,k5=-0.0
p1=0.3,p2=0.5
b1=0.4,b2=0.5
如图所示
②在DATMatrix2.0中,同理也要将主点偏移和焦距计算为mm为单位,在畸变差参数中勾选“参数以像素为单位”,“左下角为原点”,输入如下
2)给出以毫米为单位的检校文件,如
此时不要选择“校正参数以像素为单位”,填入扫描分辨率d x=d y=0.0064。
x0=0.150030,y0=0.144411
k3=7.622377e-005 ,k5=-7.504345e-008 ,k7=0.00e-00
p1=1.100736e-005,p2=-7.158744e-006
附注其在MapMatrix和DA TMatrix中相机文件的填写方法:
①在MapMatrix中,由于此时相机检校文件给出的参数已经为mm,故可以直接填入,在畸变差参数中不勾选“参数以像素为单位”,“左下角为原点”。
如图所示:
②在DATMatrix2.0中,此时相机检校文件给出的参数已经为mm,故可以直接填入,在畸变差参数中不勾选“参数以像素为单位”,“左下角为原点”。
如图所示:
3)给出的是主点偏移量和像幅大小,以像素为单位,如
对于这种情况先把x0和y0换到左下角坐标系中去,选择“校正参数以像素为单位”和“像素坐标从左下角起算”,填入扫描分辨率d x=d y=0.00641。
x0=14.06852+5616/2=,y0=79.58232+3744/2
k3= -3.55584e-009,k5=1.52161e-016
p1=-1.02210e-008,p2= 6.78741e-008
附注其在MapMatrix和DA TMatrix中相机文件的填写方法:
①在MapMatrix中,由于此时给出的是主点偏移量,但是单位为像素,故只需将其进行单位转换后输入:
X方向主点偏移=0.00641*14.06852=0.0901792132
Y方向主点偏移=0.00641*79.58232=0.5101226712
焦距=(5334.17785+5334.51609)*0.00641/2=34.1931640777
进入畸变差参数,勾选“参数以像素为单位”,“左下角为原点”,将畸变参数输入:k3= -3.55584e-009,k5=1.52161e-016
p1=-1.02210e-008,p2= 6.78741e-008
如图所示:
②在DATMatrix中,由于此时给出的是主点偏移量,但是单位为像素,故只需将其进行单位转换后输入。
进入畸变差参数,勾选“参数以像素为单位”,“左下角为原点”,将畸变参数输入。
如图所示:。