LPC11C14 CAN波特率计算公式
飞思卡尔s12系列CAN波特率计算
简单介绍一个波特率的计算,在CAN的底层协议里将CAN数据的每一位时间(TBit)分为许多的时间段(Tscl),这些时间段包括:A.位同步时间(Tsync)B.时间段1(Tseg1)C.时间段2(Tseg2)其中位同步时间占用1个Tscl;时间段2占用(Tseg1+1)个Tscl;时间段2占用(Tseg2+1)个Tscl,所以CAN控制器的位时间(TBit)就是:TBit=Tseg1+Tseg2+Tsync=(TSEG1+TSEG2+3)*Tscl,那么CAN的波特率(CANbps)就是1/TBit。
但是这样计算出的值是一个理论值。
在实际的网络通信中由于存在传输的延时、不同节点的晶体的误差等因素,使得网络CAN的波特率的计算变得复杂起来。
CAN在技术上便引入了重同步的概念,以更好的解决这些问题。
这样重同步带来的结果就是要么时间段1(Tseg1)增加TSJW(同步跳转宽度SJW+1),要么时间段减少TSJW,因此CAN的波特率实际上有一个范围:1/(Tbit+Tsjw)≤CANbps≤1/(Tbit-Tsjw)CAN有波特率的值四以下几个元素决定:A.最小时间段Tscl;B.时间段1TSEG1;C.时间段2TSEG2;D.同步跳转宽度SJW那么Tscl又是怎么计算的呢?这是总总线时序寄存器中的预分频寄存器BRP派上了用场,Tscl=(BRP+1)/FVBP。
FVBP为微处理器的外设时钟。
下面用一个例子来举例说明。
注:本例中时钟使用总线时钟,若选择外设时钟,则外设时钟=晶振频率/2比如,总线时钟fbus=16M,准备设定的波特率CANbps=250K,则(1)位时间TBit=1/250k=4us.同时,(2)TBit=Tseg1+Tseg2+Tsync=(TSEG1+TSEG2+3)*Tscl,一般(TSEG1+TSEG2+3)的值取16(8~25之间),则Tscl=4us/16=250ns而同时(3)Tscl=(BRP+1)/fbusfbus为微处理器的总线时钟。
CAN波特率设置时的参数计算
CAN波特率设置时的参数计算CAN(Controller Area Network)总线最早由德国 BOSCH公司提出,主要用于汽车内部测量与控制中心之间的数据通信。
由于其良好的性能,在世界范围内广泛应用于其他领域当中,如工业自动化、汽车电子、楼宇建筑、电梯网络、电力通讯和安防消防等诸多领域,并取逐渐成为这些行业的主要通讯手段。
Can控制器器只需要进行少量的设置就可以进行通信,其中较难设置的部分就是通信波特率的计算。
CAN总线能够在一定的范围内容忍总线上CAN节点的通信波特率的偏差,这种机能使得CAN总线有很强的容错性,同时也降低了对每个节点的振荡器精度。
实际上,CAN总线的波特率是一个范围。
假设定义的波特率是250KB/S,但是实际上根据对寄存器的设置,实际的波特率可能为200~300KB/S(具体值取决于寄存器的设置)。
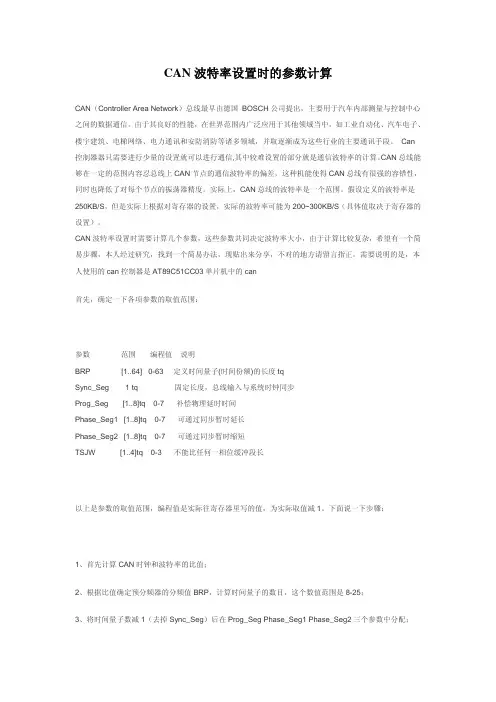
CAN波特率设置时需要计算几个参数,这些参数共同决定波特率大小,由于计算比较复杂,希望有一个简易步骤,本人经过研究,找到一个简易办法,现贴出来分享,不对的地方请留言指正。
需要说明的是,本人使用的can控制器是AT89C51CC03单片机中的can首先,确定一下各项参数的取值范围:参数范围编程值说明BRP [1..64] 0-63 定义时间量子(时间份额)的长度tqSync_Seg 1 tq 固定长度,总线输入与系统时钟同步Prog_Seg [1..8]tq 0-7 补偿物理延时时间Phase_Seg1 [1..8]tq 0-7 可通过同步暂时延长Phase_Seg2 [1..8]tq 0-7 可通过同步暂时缩短TSJW [1..4]tq 0-3 不能比任何一相位缓冲段长以上是参数的取值范围,编程值是实际往寄存器里写的值,为实际取值减1。
下面说一下步骤:1、首先计算CAN时钟和波特率的比值;2、根据比值确定预分频器的分频值BRP,计算时间量子的数目,这个数值范围是8-25;3、将时间量子数减1(去掉Sync_Seg)后在Prog_Seg Phase_Seg1 Phase_Seg2三个参数中分配;4、Prog_Seg和整个线路的时延有关,一般不太好确定,可以按下面的原则进行分配:Prog_Seg<=Phase_Seg1<=Phase_Seg2 ;Phase_Seg1=Phase_Seg2 或者 Phase_Seg1+1=Phase_Seg2;5、SJW取Phase_Seg1和4中小的那个。
单片机波特率计算公式
单片机波特率计算公式
单片机的波特率计算公式如下:
波特率=系统时钟频率/(16*加载值)
其中,系统时钟频率是单片机内部时钟的频率,单位为Hz(赫兹),常见的系统时钟频率有4MHz、8MHz、12MHz等。
加载值是用来控制波特率的寄存器的值,可以通过修改这个值来调节
波特率,加载值必须是一个16位的整数。
根据计算公式,可以推导出加载值的计算公式:
加载值=系统时钟频率/(16*波特率)
举例说明:
假设系统时钟频率为8MHz,要设置波特率为9600,那么计算加载值
的公式如下:
由于加载值必须是一个整数,所以最终的加载值为52
通过这个加载值,可以设置单片机的波特率为9600,即串口通信的
传输速率为9600bps。
需要注意的是,这个公式是计算串行通信中UART(通用异步收发传
输器)的波特率。
不同的单片机厂商可能有略微不同的实现方式,但原理
是相同的。
同时,还要注意系统时钟频率和波特率的匹配问题。
在进行串行通信时,发送方和接收方的波特率必须相同,否则会出现数据接收错误的问题。
CAN波特率计算
CAN波特率计算
CAN总线的波特率一般不超过1Mbit/s,但少数场合可以更高,比如汽车电子控制系统(ECU)和汽车仪表集成系统(IMS)中的高速CAN。
CAN总线上的波特率通常以BRP(波特率参数)和波特率系数K来表示,其计算公式为:
BRP = fOSC/(NBTR*FBit)
其中,fOSC为CAN控制器的时钟频率,NBTR为波特率比特率(比特/秒),FBit为波特率系数K, 以下是一些常用的CAN波特率:10Kbit/s:BRP=4,K=8;
20Kbit/s:BRP=2,K=8;
125Kbit/s:BRP=2,K=8;
250Kbit/s:BRP=1,K=8;
500Kbit/s:BRP=0,K=8;
800Kbit/s:BRP=0,K=8;
1Mbit/s:BRP=0,K=8
一般来说,CAN总线上使用的波特率越高,总线上的数据传输速率就越快,但抗干扰能力越差。
所以,在选择CAN总线上的波特率时应当根据实际情况来选择,以满足实际应用场合的需求。
can总线波特率计算方法
can总线波特率计算方法CAN(Controller Area Network)总线是一种常用于汽车、工业和通信领域的网络通信协议,它的波特率是指数据传输速率,是衡量总线性能的重要指标。
CAN总线的波特率计算方法可以通过以下步骤进行。
一、了解CAN总线基本概念和术语在深入探讨CAN总线波特率计算方法之前,首先需要了解一些基本概念和术语。
1. 总线速率(bit rate):CAN总线传输数据的速率,通常用波特率(bps)表示。
2. 采样点数量(number of time quanta):一个CAN总线位周期内的时间划分数,通常是8个。
3. 位周期时间(bit time):一个CAN总线位周期的持续时间,通常由采样点数量和每个时间划分的时间(时间划分数)决定。
4. 传输速率误差(transmission rate error):实际波特率与预期波特率之间的差别,通常以百分比表示。
二、计算CAN总线的理论波特率根据CAN总线的基本概念和术语,可以计算CAN总线的理论波特率。
以下是计算波特率的步骤。
1. 确定采样点数量:根据CAN总线的需求和要求,确定一个合适的采样点数量。
常用的采样点数量为8个。
2. 计算位周期时间:位周期时间等于一个时间划分的时间乘以采样点数量。
假设每个时间划分的时间为T,位周期时间为Tbit。
例如,如果每个时间划分的时间为1微秒,采样点数量为8个,则位周期时间为8微秒。
3. 计算总线速率:总线速率等于位周期时间的倒数。
假设位周期时间为Tbit,总线速率为BR。
推导公式为:BR = 1 / Tbit。
在上述例子中,总线速率为125 kbps。
三、考虑采样点数量和传输速率误差的影响除了基本的波特率计算方法外,还需要考虑采样点数量和传输速率误差对CAN总线性能的影响。
1. 采样点数量:较多的采样点数量可以提高系统的抗噪性能,但也会增加总线负载和传输延迟。
因此,在选择采样点数量时需要综合考虑各方面因素。
CAN总线波特率的计算方法
根据 Philips 公司的独立通信控制器, 一个位周期由 3 个部分组成:同步段 (t SYNC_SEG ) 、 相位缓冲段 1 (t TSEG1 ) 和相位缓冲段 2 (t T S E G 2 ) 。 Tbit = tSYNC_SEG + tTSEG1 + tTSEG2 ( 2) 所有这些时间段, 都有一个共同的时间单元— —系 统时钟周期 (T SCL ) 。 具体到 SJA1000, T SCL 由总线时序寄 存器的值来确定。 S J A 1 0 0 0 有 2 个总线时序寄存器, 即 总线时序寄存器 0 (BTR0) 和总线时序寄存器 1 (BTR1) 。 这 2 个寄存器有自己不同的功能定义, 共同作用决定总 线的通信波特率。 总线时序寄存器 0 定义波特率预设值 B R P (共 6 位, 取值区间[ 1 , 6 4 ] ) 和同步跳转宽度 S J W (共 2 位, 取值区间[ 1 , 4 ] ) 的值。 位功能说明如表 1 所列。
( 7) TSEG1.1+1×TESG1.0+1) ( 8) TSCL × (4 × TSEG 2.2 + 2 × TSEG 2.1 + 1 × TESG 2.0 + 1)
<<1, 可以进行近似。
表 3
位 SAM 值 0 1 功 能 三倍 总线采样三次 建议在中/低速总线(A和B级)使用 有利于过滤总线上的毛刺 单倍 总线采样一次 建议使用在高速总线上(SAE C级)
TSCL, min =
TSCL,rat 1 + ∆f
( 10)
相应的系统时钟周期也会有误差。 T S C L , m i n 表示系统 时钟周期最小值, T S C L , m a x 表示系 统时钟周期最大值, T S C L , r a t 表示 系统时钟周期额定值。 由于Δ f
can波特率自动设置算法
can波特率自动设置算法
CAN总线是一种常用的通信协议,它可以在汽车、工业控制、航空航天等领域中广泛应用。
在CAN总线中,波特率是一个非常重要的参数,它决定了数据传输的速度和可靠性。
因此,如何自动设置CAN波特率是一个非常重要的问题。
CAN总线的波特率通常是由控制器和节点之间的协商来确定的。
在CAN总线中,控制器会向节点发送一个特殊的帧,这个帧包含了控制器的波特率设置。
节点会根据这个帧来自动设置自己的波特率。
这种自动设置算法被称为自适应波特率算法。
自适应波特率算法的实现需要满足以下几个条件:
1.控制器和节点必须支持自适应波特率算法。
2.控制器和节点必须能够正确解析和处理自适应波特率帧。
3.控制器和节点必须能够正确设置自己的波特率。
在实际应用中,自适应波特率算法通常是由控制器来实现的。
控制器会向节点发送自适应波特率帧,并根据节点的响应来自动设置自己的波特率。
这种自动设置算法可以大大简化CAN总线的配置和调试工作,提高系统的可靠性和稳定性。
自适应波特率算法是CAN总线中非常重要的一部分,它可以自动设置CAN总线的波特率,提高系统的可靠性和稳定性。
在实际应用
中,我们需要选择支持自适应波特率算法的控制器和节点,并正确配置和调试CAN总线,以确保系统的正常运行。
8051单片机波特率计算公式(配套C语言例程
8051单片机波特率计算公式(配套C语言例程)水寒8051 182 views 0 Comments发表评论8051单片机使用定时器1工作在方式2的情况下作为串口波特率发生器,其波特率=(2smod/32)×(定时器T1溢出率),其中smod是PCON<7>,表示是否波特率加倍,Fsoc是系统的晶振大小。
波特率公式中:T1溢出率=溢出周期的倒数;溢出周期=(256-TH1)×12/Fosc;最终公式:我们一般不太关注波特率的计算,而是关心选用的传输速度(波特率)去反算定时器1(自动重装模式)的初值(TH1),所以将上面的公式导一下,得到TH1的公式:下面针对串口发送程序,水寒写下例程,供大家参考。
(我使用的是STC12C5A40S2调试,原则上在STC89C5x、AT89C5x等8051核心的单片机上都能够成功,由于程序比较简单,我没有试,但应该没有问题的)#include "Reg52.H"/******************************************************************* 请提前计算一下所选晶振能达到的最高速度,波特率不能超过最高速度(1) 波特率加倍(SMOD=1): Max_Baud = FOSC/12/16(2) 波特率不加倍(SMOD=0):Max_Baud = FOSC/12/32例如:22.1184MHz晶振,波特率加倍时,最大波特率=22118400/12/16=115200 *******************************************************************/ #define FOSC 22118400 //振荡频率#define BAUD 9600 //波特率#define SMOD 1 //是否波特率加倍#if SMOD#define TC_VAL (256-FOSC/16/12/BAUD)#else#define TC_VAL (256-FOSC/32/12/BAUD)#endiftypedef unsigned char uint8;typedef unsigned int uint16;code const char str1[] = "Ther string is transmitted from 80C51!\r\n"; code const char str2[] = "Author: xqlu(at)\r\n";/***************函数声明*******************/void InitUART(void);void SendOneByte(uint8);void SendrStr(const uint8 *ptr);/****************主函数********************/void main(void){uint8 i=0;InitUART();while(str2[i]!='\0'){SendOneByte(str2[i++]);}SendrStr(str1);while(1);}/****************中断服务函数***************/void UART_ISR(void) interrupt 4{uint8 RX_Data;//只响应“接收”中断,“发送”中断来了就直接抹掉if(RI){RI = 0; //串口中断标志不能自己清除,需要手动清除RX_Data=SBUF;SendOneByte(RX_Data);}elseTI = 0; //串口发中断是发送完缓冲区数据之后产生}/****************串口初始化函数*************/void InitUART(void){TMOD = 0x20;SCON = 0x50;TH1 = TC_VAL;TL1 = TH1;PCON = 0x80; //发送速率加倍ES = 1;EA = 1;TR1 = 1;}/**************串口发送字符函数*************/void SendOneByte(uint8 c){ES = 0; //禁止发送中断SBUF = c;while(!TI);TI = 0;ES = 1;}/**************串口发送字符串函数*************/void SendrStr(const uint8 *ptr){do{SendOneByte(*ptr);}while(*ptr++!='\0');}。
CAN波特率解析
CAN波特率解析CAN波特率与负载率1、背景说明:1.1为了讲清这个问题,需要先就两个概念进行说明:波特率和比特率。
波特率:单位时间内,通信通道传输码元的速率。
1个波特指每秒传输1个码元的符号。
(单位时间内调制状态改变的次数,单位为波特)比特率:单位时间内,通信通道传送的二进制位数。
1.2波特率和比特率的关系:比特率=波特率*单个调制状态对应的二进制位数(比特率=波特率*log2n)由于CAN通信中的信号是二进制的,所以对CAN来说波特率和比特率相等,只是业界习惯用bps表示CAN的波特率。
2、CAN总线的通信负载率2.1说明负载率:CAN总线实际数据传输速率与理论上能达到的数据传输速率的比值。
根据实验表明,负载率在30%的情况下,优先级高节点的平均报文传输时间和理论传输时间相差无几;而优先级低的存在20%左右的延时;当负载率达到60%的情况下,优先级最高的节点都有至少25%的延时,优先级最低的延时达到了4倍,根本无法满足实时性;当总线的平均利用率达到70%以上时,总线的通信将用可能出现拥堵的现象,极端的情况下将有可能造成错误帧的出现。
因此,负载率当然是越低越好,越能保证实时性,但是负载率太低就无法传输足够的数据,这是CAN的一个问题,在数据量大的时候无法保证实时性。
一般的说法是30%左右的负载率是最好的。
2.2需要控制通信负载率的原因:引入CAN理论中另外几个重要的概念:ID仲裁、闲时发送和最大反应时间。
CAN总线本质上是一种串口通讯,靠在时间线上对每一位的电压值进行调制来搭载不同的信号。
因为各节点共用总线介质,对总线的使用权界定就至关重要。
只有在总线空闲时,发送节点才能向总线上发送帧起始及后续帧ID,只有在帧ID赢得仲裁时,发送节点拥有总线控制权进而向总线发送报文剩余部分,在仲裁中失败的节点让出总线控制权等待下次总线空闲时继续尝试发送。
即如果某一个节点需要发送一帧报文,它需要同时满足两个条件:1、总线是空闲的,即目前没有任何节点在发送报文,在总线上表示为节点监测到11个连续的隐性位;2、所需发送的报文赢得ID仲裁,即报文优先级较高。
c51单片机串口初值计算
c51单片机串口初值计算
单片机串口的波特率是由发送和接收方约定的,它决定了串口通信的速率。
在C51单片机中,波特率的计算取决于计时器的预分频和定时器的重载值。
首先,我们需要确定计时器的工作模式和定时器的重载值。
在C51单片机中,常用的工作模式有模式1和模式2,而定时器的重载值取决于波特率的设定。
在模式1中,计时器将自动重载,重载值为TH1和TL1寄存器中的初始值,并且定时器溢出后会自动触发中断。
在模式2中,计时器只计数到重载值,然后自动重置为初始值,但是不会触发中断。
确定了计时器工作模式和定时器的重载值后,我们可以使用以下公式计算波特率:
波特率=晶振频率/(32*计时器预分频*重载值)
其中,晶振频率是单片机系统中晶振的工作频率,计时器预分频是控制计时器输入频率的一个系数,一般可以设置为12或者4,重载值为TH1和TL1寄存器中的初始值。
假设晶振频率为11.0592MHz,计时器预分频为12,波特率为2400。
我们可以根据上述公式计算出重载值:
因此,我们可以将TH1和TL1的初始值设置为120,以达到2400的波特率。
需要注意的是,波特率的计算可能存在一定的误差,因此在实际应用中,可能需要对计算结果进行调整。
另外,在计算波特率时,还需要考虑是否使用倍频器等因素,具体应根据单片机的实际情况进行设置。