T68卧式镗床电气控制原理说明书
T68型卧式镗床PLC控制系统设计
T68型卧式镗床PLC控制系统设计目录1.T68卧式镗床控制原理说明书 (1)2.T68型卧式镗床电气控制主回路 (2)3.安装板电气元件平面布置图 (3)4.控制面板按钮、行程开关平面布置图 (4)5.镗床控制系统P L C外部接线图 (5)6.镗床控制系统P L C梯形图 (6)7.触摸屏控制 (7)8.电气元件一览表 (7)9.参观工厂有感 (8)10.实习心得 (9)11.附录A:实习日记 (9)1 T68型卧式镗床控制原理说明书1.1.T68型卧式镗床的用途T68型卧式镗床主要用于钻孔、镗孔、铰孔及加工端平面等。
1.2 电气控制线路的特点(1)主电机为双速电机,它提供机床的主运动和进给运动的动力。
高低速转换,由主轴孔盘变速机构内的限位开关S控制,S常态时接通低速,被压下时接通高速。
由接触器KM6及KM7实现定子绕组从三角形接法转接成双星型接法。
(2)主电机可正反转、点动及反接制动。
(3)主电机用低速时,可直接启动;但用高速时,则由控制线路先起动到低速,延时后再自动转换到高速,以减少起动电流。
(4)在主轴变速或进给变速时主电动机能缓慢转动,使齿轮易于啮合。
1.3 控制线路工作原理(1)主轴的点动控制主轴的正反向点动由按钮SB3和SB4操纵。
按下正向点动按钮SB3后,PLC输出使KM1、KM6线圈得电动作。
因此,三相电源经KM1主触点、限流电阻R和接触器KM6的主触点接通电动机M1,使电动机在低速下旋转。
放开按钮时,KM1和KM6都相继断电释放,电动机断电停止。
反向点动与正向点动相似,由SB4操纵,经接触器KM2及KM6相互配合动作来完成。
(2)主电机的正反向长动主电机正反控制由SB1和SB2操纵。
当要求电动机低速运转时,限位开关XK为断开状态,按下起动按钮SB1、KM1、KM3、KM6得电动作。
主电机就在全电压和三角形接线下,直接起动低速运行。
使用高速时,限位开关XK闭合,按下SB1后,电动机先低速起动,延时5秒后KM6断开,再经0.6秒KM7得电动作。
T68型卧式镗床电气控制

6
7
变压器 8
主电机控制
正转
反转
低速
9 10 11 12 13
14
15
高速
1617FFra bibliotek1 L1 L2 L3
QS KM1 9
FR 11
FU2
KM2 13
KM6 18
TC 29
36V 28
FU4
27 6.3V
110V
3
1
ST3
FU3
4
KM7
2
SB1
19
5
SB2 6
SB3 SB4
SB5 10
ST2 12 15
9
13
KM2
4 12 9 4 17 4
KM3 KM4
3 6 15 4 14
3
4
3
4
KM5
2 6 17 2 16 2
KT 15 14
快速移动
正转
反转
18
19
指示灯 20
照明灯 21
ST4 28
27 6.3V 36V
ST6 ST5 23 25 ST5 ST6 24 26
开 关 SA
HL EL
3
29
KM6 KM7
67 67 67
T68型卧式镗床电气控制
1、外形
T68型卧式镗床电气控制
2、结构与运动形式
后立柱 导轨
尾架
床身
工作台
镗轴
前立柱 导轨 镗头架
下溜板 上溜板
T68型卧式镗床电气控制
3、电力拖动特点
❖双速笼型异步电动机作为主拖动电机。 ❖进给运动和主轴及花盘旋转用同一台电动机拖动,
主轴电动机能正反向点动,并有准确的制动。 ❖主轴电动机低速时直接起动,高速时先低速启动,延时后转为高速运转。 ❖主轴变速和进给变速设低速冲动环节。 ❖各运动部件能实现快速移动。 ❖工作台或镗头架的自动进给与主轴或花盘刀架的自动
T68型卧式镗床电气控制电路分析

LOGO
一、机床主要结构和运动形式
T68卧式镗床结构示意图 1-床身 2-镗头架 3-前立柱 4-平旋盘 5-镗 轴 6-工作台 7-后立柱 8-尾座 9-上溜板 10-下溜板 11-刀具溜板
1、结构 2、运动形式 主运动:镗轴和花盘的旋转运动; 进给运动:镗轴的轴向移动、花盘 上刀具溜板的径向移动、工作台的 横向移动、工作台的纵向移动和镗 头架的垂直直给; 辅助运动:工作台的旋转、尾架随 同镗头架的升降和后立柱的水平移 动。
LOGO
Page 14
电 器 位 置 图
LOGO
常见故障分析:
1、主轴能低速起动,但不能高速运 转 (1)手柄在高速位置时没有能把行 程开关SQ压下,主要原因是SQ位置 变动或松动,应重新调整位置,拧紧 螺钉。 (2)行程开关SQ或时间继电器KT 触点接触不良或接线脱落。 2、主轴电动机不能制动 (1)速度继电器损坏,其正转常开 触点KS—1和反转常开触点KS—2不 能闭合。 (2)接触器KM1或KM2的常闭触点 接触不良。
8)由于运动部件多,应设有必要的联锁与保护环节。
Page 4
LOGO
三、电气控制电路分析
Page 5
LOGO
Page 6
LOGO
1、主电路分析
由自动空气开关QS引入三相电源。M1是一台主轴电机,M2是一台快速 移动电机。KM1、KM2为正反转接触器、KM3为制动接触器,M1起动
和运行时KM3主触头闭合,R短接不起 作用,反接制动时R串入电路中。 KM7(或KM8)动合触点闭合时,M1定子 绕组为YY接法电动机为高速;KM6动合
Page 15
LOGO
3、主轴变速手柄拉开时不能制动 (1)主轴变速行程开关SQ1的位 置移动,所以主轴变速手柄拉开时 SQ1不能复位。 (2)速度继电器损坏,其常开触 点不能闭合,使反接制动接触器不 能吸合。 4、进给变速手柄拉开时不能制动 原因与3基本相同,不过应检查进 给变速行程开关SQ3有没有复位, 速度继电器是否工作正常。
项目28 T68型卧式镗床电气控制

T68型卧式镗床电气控制
若要反转时,只需按下反向启动按钮SB3,工作 过程与正转情况相同。在主轴电动机M1正、反向转 动时,与M1联动的速度继电器KV,都有对应的触点 闭合,为正、反转的停车制动作准备。
从镗床的电气控制原理图28-2中可以看出,无论 主轴电动机M1是在停车时,还是在低速运转时,若 将主轴变速手柄置于高速挡位置,由于时间继电器 KT的延时作用,M1总是先低速启动(或低速运转), 然后再自动过渡到高速运转。
T68型卧式镗床电气控制
四、原理叙述 (一)主电路 主电路有两台电动机,其中M1是主轴(镗轴)电 动机,与它同轴接有一只速度继电器KV,M2是快速 移动电动机。 1.主轴电动机 主轴电动机M1是4/2极的双速电动机,绕组接法 为△/YY。它可以进行点动、连续正反转控制,停车 采用速度继电器控制的串电阻反接制动,机床采用双 速电机电气调速与机械调速的机电联合调速。
T68型卧式镗床电气控制
主轴电动机M1提供镗轴及花盘旋转和工作台常速 进给的动力,同时还驱动润滑油泵。
用熔断器FU1作为镗床电路总的短路保护及主轴 电动机M1的短路保护;热继电器FR作为主轴电动机 M1的过载保护。
2.快速移动电动机 为了提高工作效率,主轴的轴向进给、镗头架的 垂直进给、工作台的横向进给和纵向进给可以快速移 动,用快速移动电动机M2拖动。
T68型卧式镗床的主轴电动机为双速电动机,检 查其定子绕组△连接和YY连接的相序是否正确。
检查主轴制动用速度继电器KV的动作情况是否 正常;检查速度继电器的常开、常闭触点的连接是否 正确。
T68型卧式镗床电气控制
图 28-2 T68 卧式 镗床 电气 控制 原理 图
T68型卧式镗床电气控制
(三)模拟操作 1.静态操作 2.动态操作 在熟悉镗床操作的基础上,在指导老师的确认 下,通电进行动态模拟操作。 1)主轴电动机M1的操作 分别将主轴变速手柄置 于低速和高速挡,按下启动按钮SB2或SB3,观察主 轴电动机M1的启动运转情况;轻按停止按钮SB1,观 察 M1 的 停 车 过 程 ; 若 将 停 止 按 钮 SB1 按 到 底 , 观 察 M1的停车过程。
T68卧式镗床电气原理与故障分析

摘要T68镗床主要用于加工精确的孔和各孔间的距离要求较为精确的零件。
目前国内使用镗床90%都是使用继电器-接触器控制方式。
掌握T68镗床电气控制电路板中各电器位置的合理布置及配线方式。
熟悉所用电器的规格、型号、用途及动作原理。
在分析继电—接触器控制电路的基本环节在T68镗床电气控制电路中的控制作用时,使用仪表、工具等对机床电气控制电路进行有针对性的检查、测试和维修。
学会根据电气原理图分析和排除故障,初步掌握一般机床电气设备的调试。
故障分析和排除故障的方法,具有一定的维修能力。
T 68 镗床电气原理与故障分析目录摘要 (I)课程名............................................................................................................| 第一章t68卧式镗床简介 (1)1.1 t68镗床运动特性介绍 (1)1.2 t68镗床电力拖动方式及电气控制要求 (2)1.3 设计目的 (3)第二章t68镗床电气控制系统原理分析 (4)2.1 t68镗床电气控制系统组成 (4)2.2 T68型镗床电气控制线路分析 (5)第三章t68卧式镗床的电气排故 (9)3.1t68排故的前期准备 (9)3.2 t68常见电气故障排除方法 (11)3.3机床电气排故的方法总结 (13)总结 (18)参考文献 (19)致谢 (20)第一章t68卧式镗床简介1.1t68镗床运动特性介绍在介绍t68镗床运动特性之前,先看镗床各运动部的分布情况,找来一张镗床整体外观图,对个别地方稍加修改后如下,供大家参考。
床身是一个整体铸件,在它的一端固定有前立柱,在前立柱的垂直导轨上又安装有镗头架,镗头架可沿垂直导轨上下移动。
在镗头架里集中里装有主轴、变速箱、进给箱和操纵机构等部件。
切削刀具一般安装在镗轴前端的锥形孔里,或安装在花盘的刀具溜板上。
T68卧式镗床电气控制原理说明书

T68卧式镗床电气控制原理说明书T68卧式镗床电气控制原理说明书1.1卧式镗床的用途镗床主要用于孔的精加工,可分为卧式镗床、落地镗床、坐标镗床和金钢镗床等。
卧式镗床应用较多,它可以进行钻孔、镗孔、扩孔、铰孔及加工端平面等,使用一些附件后,还可以车削圆柱表面、螺纹,装上铣刀可以进行铣削。
本次课程设计主要以T68卧式镗床为例。
1.2卧式镗床的主要结构与运动形式T 68型卧式镗床主要由床身、前立柱、镗床架、后立柱、尾座、下溜板、上溜板、工作台等几部分组成。
其结构如下图所示。
1.2.1主要结构镗床在加工时,一般是将工件固定在工作台上,由镗杆或平旋盘(花盘)上固定的刀具进行加工。
1) 前立柱:固定地安装在床身的右端,在它的垂直导轨上装有可上下移动的主轴箱。
2) 主轴箱:其中装有主轴部件,主运动和进给运动变速传动机构以及操纵机构。
3) 后立柱:可沿着床身导轨横向移动,调整位置,它上面的镗杆支架可与主轴箱同步垂直移动。
如有需要,可将其从床身上卸下。
4) 要作台:由下溜板,上溜板和回转工作台三层组成。
下溜板可沿床身顶面上的水平导轨作纵向移动,上溜板可沿下溜板顶部的导轨作横向移动,回转工作台可以上溜板的环形导轨上绕垂直轴线转位,能使要件在水平面内调整至一定角度位置,以便在一次安装中对互相平等或成一角度的孔与平面进行加工。
1.2.2 运动形式卧式镗床加工时运动有:1) 主运动:主轴的旋转与平旋盘的旋转运动。
2) 进给运动:主轴在主轴箱中的进出进给;平旋盘上刀具的径向进给;主轴箱的升降,即垂直进给;工作台的横向和纵向进给。
这些进给运动都可以进行手动或机动。
3) 辅助运动:回转工作台的转动;主轴箱、工作台等的进给运动上的快速调位移动;后立柱的纵向调位移动;尾座的垂直调位移动。
1.2.3 T68型卧式镗床运动对电气控制电路的要求1) 主运动与进给运动由一台双速电动机拖动,高低速可选择;2) 主电动机要求正反转以及点动控制;3) 主电动机应设有快速准确的停车环节;4) 主轴变速应有变速冲动环节;5) 快速移动电动机采用正反转点动控制方式;6) 进给运动和工作台不平移动两者只能取一,必须要有互锁。
T68型卧式镗床的电气控制线路 - 机床
T68型卧式镗床的电气控制线路 - 机床镗床主要用来加工箱体类零件的孔,一般有卧式镗床和坐标镗床两种。
T68型卧式镗床主要用于钻孔、镗孔、铰孔及加工端平面等,使用一些附件后,还可以车削螺纹。
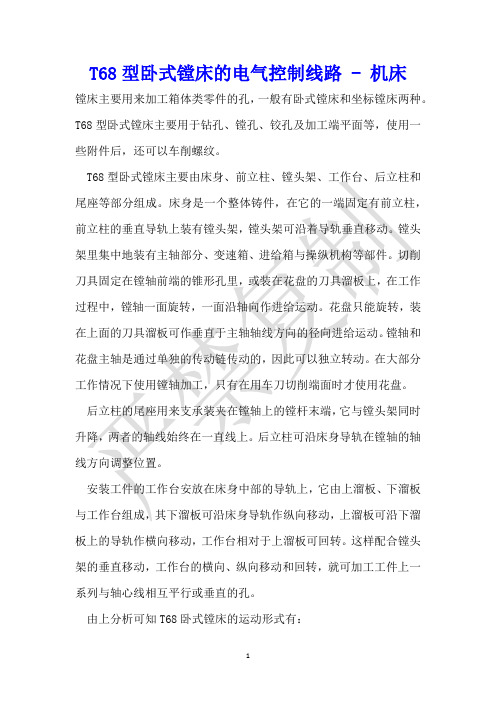
T68型卧式镗床主要由床身、前立柱、镗头架、工作台、后立柱和尾座等部分组成。
床身是一个整体铸件,在它的一端固定有前立柱,前立柱的垂直导轨上装有镗头架,镗头架可沿着导轨垂直移动。
镗头架里集中地装有主轴部分、变速箱、进给箱与操纵机构等部件。
切削刀具固定在镗轴前端的锥形孔里,或装在花盘的刀具溜板上,在工作过程中,镗轴一面旋转,一面沿轴向作进给运动。
花盘只能旋转,装在上面的刀具溜板可作垂直于主轴轴线方向的径向进给运动。
镗轴和花盘主轴是通过单独的传动链传动的,因此可以独立转动。
在大部分工作情况下使用镗轴加工,只有在用车刀切削端面时才使用花盘。
后立柱的尾座用来支承装夹在镗轴上的镗杆末端,它与镗头架同时升降,两者的轴线始终在一直线上。
后立柱可沿床身导轨在镗轴的轴线方向调整位置。
安装工件的工作台安放在床身中部的导轨上,它由上溜板、下溜板与工作台组成,其下溜板可沿床身导轨作纵向移动,上溜板可沿下溜板上的导轨作横向移动,工作台相对于上溜板可回转。
这样配合镗头架的垂直移动,工作台的横向、纵向移动和回转,就可加工工件上一系列与轴心线相互平行或垂直的孔。
由上分析可知T68卧式镗床的运动形式有:主运动:镗轴的旋转运动和花盘的旋转运动。
进给运动:镗轴的轴向进给、花盘上刀具的径向进给、镗头架的垂直进给、工作台的横向进给和纵向进给。
辅助运动:工作台的回转、后立柱的轴向移动、尾架的垂直移动及各部分的快速移动。
图1所示为T68型卧式镗床的电气控制线路图,其主要特点有:(1)主轴有较大的调速范围,采用△/YY双速笼型异步电动机作为主拖动电动机,并采用机电联合调速。
低速时将定子绕组接成三角形,高速时接成双星形。
主电动机在低速时可直接启动,高速时先接通低速再经延时接通高速。
T68镗床电气控制系统

M1 — 主 电 机 , KMl、 KM2 控 制 其 正 反 转 ; KM3 控 制 低 速 运 转 , KM4、KM5 控 制高速运转
YB— 主 轴 制 动 电 磁 铁 , 由KM3或KM5控制
M2— 快移电机,由 KM6、 KM7控制。 FR—过载保护 现代电气自动控制技术
Y SH X
保护环节 短路保护: FUI ~FU4 过载保护:
FR
零压欠压保护:
自锁环节
现代电气自动控制技术
现代电气自动控制技术
Y SH X
2.2 T68镗床电气控制系统
前立柱的垂直导轨上装有 切削刀具固定在镗轴前端 床身的一端固定有前立柱 镗头架,镗头架可沿着导 的锥形孔里,或装在花盘 轨垂直移动。镗头架里集 的刀具溜板上,在工作过 中地装有主轴、变速箱、 程中,镗轴一面旋转,一 进给箱与操纵机构等部件 面沿轴向作进给运动 花盘只能旋转,装在上面 的刀具溜板可作垂直于主 后立柱的尾架用来支承装夹在镗 轴轴线方向的径向给进运 轴上的镗杆末端,它与镗头架同 安装工件的工作台安置在床身中部的导轨上,它由 动。镗轴和花盘轴是通过 时升降,两者的轴线始终在一直 上滑台、下滑台与可转动的台面组成。工作台可作 单独的传动链传动,因此 线上。后立柱可沿床身水平导轨 床身是一个整体铸件 平行于和垂直于镗轴轴线方向的移动,并可转动 可以独立转动 在镗轴的轴线方向调整位置
2.2 T68镗床电气控制系统
2.2.2.3 辅助电路分析
因为控制电路使用电器较多,所以采用一台控
制变压器TC供电 。控制电路电压为127V,并有36V
安全电压给局 部 照 明 灯 EL 供 电 , SA 为 照 明 灯 开 关 , HL 为 电源接通指示 灯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T68卧式镗床电气控制原理说明书(2008-07-30 12:05:57)标签:t68型卧式镗床说明书原理分分类:专业知识析目录1.1 卧式镗床的用途1.2 卧式镗床的主要结构与运动形式1.2.1 主要结构1.2.2 运动形式1.2.3 T68型卧式镗床运动对电气控制电路的要求1.3 T68卧式镗床的电气控制线路分析T68卧式镗床电气控制电路所用电器元件一览表1.3.1 主电路工作原理1.3.2 控制电路工作原理A.主电动机M1的控制a.正反转b.点动控制c.高低速选择d.主电动机停车制动e.变速冲动控制B. 快速移动电动机M2的控制C.主轴箱、工作台与主轴机动进给互锁功能D.控制电路图T68卧式镗床电气控制原理说明书1.1 卧式镗床的用途镗床主要用于孔的精加工,可分为卧式镗床、落地镗床、坐标镗床和金钢镗床等。
卧式镗床应用较多,它可以进行钻孔、镗孔、扩孔、铰孔及加工端平面等,使用一些附件后,还可以车削圆柱表面、螺纹,装上铣刀可以进行铣削。
本次课程设计主要以T68卧式镗床为例。
1.2 卧式镗床的主要结构与运动形式T 68型卧式镗床主要由床身、前立柱、镗床架、后立柱、尾座、下溜板、上溜板、工作台等几部分组成。
其结构如下图所示。
1.2.1 主要结构镗床在加工时,一般是将工件固定在工作台上,由镗杆或平旋盘(花盘)上固定的刀具进行加工。
1) 前立柱:固定地安装在床身的右端,在它的垂直导轨上装有可上下移动的主轴箱。
2) 主轴箱:其中装有主轴部件,主运动和进给运动变速传动机构以及操纵机构。
3) 后立柱:可沿着床身导轨横向移动,调整位置,它上面的镗杆支架可与主轴箱同步垂直移动。
如有需要,可将其从床身上卸下。
4) 要作台:由下溜板,上溜板和回转工作台三层组成。
下溜板可沿床身顶面上的水平导轨作纵向移动,上溜板可沿下溜板顶部的导轨作横向移动,回转工作台可以上溜板的环形导轨上绕垂直轴线转位,能使要件在水平面内调整至一定角度位置,以便在一次安装中对互相平等或成一角度的孔与平面进行加工。
1.2.2 运动形式卧式镗床加工时运动有:1) 主运动:主轴的旋转与平旋盘的旋转运动。
2) 进给运动:主轴在主轴箱中的进出进给;平旋盘上刀具的径向进给;主轴箱的升降,即垂直进给;工作台的横向和纵向进给。
这些进给运动都可以进行手动或机动。
3) 辅助运动:回转工作台的转动;主轴箱、工作台等的进给运动上的快速调位移动;后立柱的纵向调位移动;尾座的垂直调位移动。
1.2.3 T68型卧式镗床运动对电气控制电路的要求1) 主运动与进给运动由一台双速电动机拖动,高低速可选择;2) 主电动机要求正反转以及点动控制;3) 主电动机应设有快速准确的停车环节;4) 主轴变速应有变速冲动环节;5) 快速移动电动机采用正反转点动控制方式;6) 进给运动和工作台不平移动两者只能取一,必须要有互锁。
1.2 T68卧式镗床的电气控制线路分析T68卧式镗床的运动情况比较复杂,控制电路中使用了较多的行程开关。
它们都安装在床身的相应位置上。
主电路有两台电动机。
T68卧式镗床电气控制电路所用电器元件一览表如下表所示:1.3.1 主电路工作原理T68卧式镗床主电动机M1采用双速电动机,由接触器KM3、KM4和KM5作三角形——双星形变换,得到主电动机M1的低速和高速。
接触器KM1、KM2主触点控制主电动机M1的正反转。
电磁铁YB用于主电动机M1断电抱闸制动。
快速移动电动机M2的正反转由接触器KM6、KM7控制,由于M2是短时间工作,所以不设置过载保护。
下图所示为T68镗床电气控制线路的主电路图:1.3.2 控制电路工作原理A.主电动机M1的控制主轴电动机M1的控制有高速和低速运动,正反转,点动控制和变速冲动。
a.正反转主轴电动机正反转由接触器KM1、KM2主触点完成电源相序的改变,达到改变电动机转向。
按下正转起动按钮SB2,接触器KM1线圈(1-9-11-13-15-17-19-21-6-2)得电,其自锁触点KM1(17-23)闭合,实现自锁。
互锁触点KM1(27-29)断开,实现对接触器KM2的互锁。
另处,常天触点KM1(31-33)闭合,为主电动机高速或低速运转做好准备。
主电路中的KM1主触点闭合,电源通过KM3或KM4、KM5接通定子绕组,主电动机M1正转。
反转时,按正反转起动按钮SB5,对应接触器KM2线圈(1-9-11-13-15-25-27-29-6-2)得电,主轴电动机M1反转。
为了防止接触器KM1 和KM2同时得电引起电源短路事故,采用这两个接触器互锁。
b.点动控制对刀时采用点动控制,这种控制不能自锁。
正转点动按钮SB3按下时,由常开触点SB3(15-17)接通接触器KM1线圈电路;常闭触点SB3(15-23)断开接触器KM1的自锁电路,使其无法自锁,从面实现点动控制。
反转点动按钮SB4同样设有常开触点各一对,利用这种复合按钮是考虑到可以主便地实现点动控制。
c.高低速选择主轴电动机M1为双速电动机,定子绕组三角形按法(KM3得电吸合)时,电动机低速旋转;双得形接法(KM4和KM5得电吸合)时,电动机高速旋转。
高低速的选择与转换由变速手柄和行程开关SQ1控制。
选择好主轴转速,变速手柄置于相应低速位置,再将变速手柄压下,行程开关SQ1未被压合,SQ1的触点不动作,由于主电机M1已经选择了正转或反转,即KM1(31-33)或KM2(31-33)闭合,此时接触器KM3线圈(1-9-11-31-33-37-3935-41-6-2)得电,其互锁触点KM3(43-45)断开,实现对接触器KM4,KM5的互锁。
主电路中的KM3主触点闭合,一方面接通电磁抱闸线圈YB,松开机械制动装置,另一方面将主轴电动机M1定子绕组接成三角形接入电源,电动面低速运转。
主轴电动机高速运转时,为了减小起动电流和机械冲击,在起动时,先将定子绕组接成低速连线(三角形连接),即先低速全压起动,经适当延时后换接成高速运转。
其工作情况是先将变速手柄置于相应高速位置,再将手柄压下,行程开关SQ1被压合,其常闭触点SQ1(33-35)断开,常开触点SQ1(33-37)闭合,时间继点器KT线圈(1-9-11-31-33-37-6-2)得电,它的延时触点暂不动作,但KT的瞬时触点KT(39-35)立即闭合,接触器KM3线圈(1-9-11-31-33-37-39-35-41-6-2),电动机M1定子接成三角形,低速起动。
经过一段延时(起动完毕),延时触点KT(37-39)断开,接触器KM3线圈断电,电动机M1解除三角开连接;延时触点KT(37-43)闭合,接触器KM4,KM5线圈(1-9-11-31-33-37-43-45-6-2)得电,主电路中的KM4,KM5主触点闭合,一方面接通电磁抱闸线圈YB,松开机械制动装置,另一方面将主电动机M1定子绕组接成双星形接入电源,电动机高速运转。
d.主电动机停车制动高低速运转时,按动停止按钮SB1,KM1~KM5线圈均断电,解除自锁,电磁抱闸线圈YB断电抱闸,电动机轴无法自由旋转,主电机M1制动迅速停车。
e.变速冲动控制考虑到本机床在运转的过程中进行变速时,能够使齿轮更好的啮合,现采用变速冲动控制。
本机床的主轴变速和进给变速分别由各自的变速孔盘机构进行调速。
其工作情况是如果运动中要变速,不必按下停车按钮,而是将变速手柄拉出,这时行程开关SQ被压,触点SQ2断开,接触器KM3,KM4,KM5线圈全部断电,无论电动机M1原来工作在低速(接触器KM3主触点闭合,三角形连接),还是工作在高速(接触器KM4,KM5主触点闭合,双星形连接)都断电停车,同时因KM3和KM5 线圈断电,电磁抱闸线圈YB断电,电磁抱闸对电动机M1进行机械制动。
这时可以转动变速操作盘(孔盘),选择所需转速,然后将变速手柄推回原位。
若手柄可以推回原处(即复位),则行程开关SQ2复位,SQ2触点闭合,些时无论是否压下行程开关SQ1,主电动机M1都是以低速起动,便于齿轮啮合。
然后过渡到新先定的转速下运行。
若因顶齿而使手柄无法推回时,可来回推动手柄,能过手柄运动中压合,释放行程开关SQ2,使电动机M1瞬间得电、断电,产生冲动,使齿轮在冲动过程在很快啮合,手柄推上。
这时变速冲动结束,主轴电动机M1是新选定的转速下转动。
B. 快速移动电动机M2的控制加工过程中,主轴箱、工作台或主轴的快速移动,是将快速手柄扳动,接通机械传动链,同时压动限位开关SQ5或SQ6,使接触器KM4,KM7线圈得电,快速移动电动机M2正转或反转,拖动有关部件快速移动。
(1)将快速移动手柄扳到“正向”位置,压动SQ6,其常开触头SQ6(11-47)闭合,KM6线圈经过(1-9-11-47-49-6-2)得电动作,M2正向转动。
将手柄扳到中间位置,SQ6复位,KM6线圈失电释放,M2停转。
(2)将快速移动手柄扳到“反向”位置,压动SQ5,其常开触头SQ5(51-53)闭合,KM7线圈经过(1-9-11-51-53-6-2)得电动作,M2反向转动。
将手柄扳至中间位置,SQ5复位,KM7线圈失电释放,M2停转。
C.主轴箱、工作台与主轴机动进给互锁功能为防止工作台,主轴箱和主轴同时机动进给,损坏机床或刀具,在电气线路上采取了相互联锁措施。
联锁通过两个关联的限位开关SQ3和SQ4来实现。
主轴进给时手柄压下SQ3,SQ3常闭触点SQ3(9-11)断开;工作台进给时手柄压下SQ4,SQ4常闭触点(9-11)断开。
两限位开关的常闭触点都断开,切断了整个控制电路的电源,从而M1和M2都不能运转。
D.控制电路图(略)PS:此文是本人自己作的课程设计说明书。
由于排版费力,作控制电路图较花时间,只作出了主电路图,在此从网上截取如下电路图供参考。
有些路径字符不合本人所用的电路图。
以本人说明书为准!。