SAR三维立体重建实验报告要点
三维运动重建研究报告
三维运动重建研究报告一.简介计算机视觉主要是通过摄像机拍摄的二维图像来获取包括三维场景的形态的和运动识别等真实世界中的信息。
计算机视觉是近年来发展十分迅速的一个科研领域,该研究领域主要分为人工智能和感知能力两个方向,研究的重点是利用计算机或者人工系统从图像或者图像序列中获得所需要的信息,包括运动目标的三维结构的恢复和运动相机参数的获取,帮助系统做出正确的决定。
所以三维运动重建属于计算机视觉领域的一个非常重要的课题。
而三维运动重建就是根据从这些连续的图像序列中的特征点来恢复运动场景和相应的运动参数。
在现实生活中,计算机视觉的应用越来越广阔,从人脸识别到车牌识别,从人物检测到人物跟踪,从特征点提取到运动重建,计算机视觉对人们的日常生活影响越来越大。
而三维运动重建的研究对于计算机视觉方面的进步有重大的促进作用,具有重要的研究意义。
二.刚体与非刚体在三维运动重建的早期研究过程中,基本上都是将三维运动重建的目标当作刚性物体来求解,其原因在于刚体的结构比较单一,计算简单。
即使对于一些部分非刚性的物体,也会将其假设为刚体,或者将其分解成刚性物体的线性组合。
但是这种方法虽然方便,却也存在许多弊端,最大的缺点就是可能会忽略许多细节,不能如实地反映出物体的真实运动状态,特别是对于非刚性很强的物体。
然而在现实世界的物体真实运动中,大多数运动都是非刚性的运动,例如身体的伸展、手臂的挥舞、人的脸部表情、舞蹈动作或者体育运动等。
因而非刚体的三维运动重建成为了三维运动重建的重中之重,越来越受人们的重视。
但是同时由于非刚体运动形式多变,结构复杂,这些都注定了对于非刚性物体进行三维运动重建的研究会是一个难点,有许多难题需要被解决。
现有的非刚体三维运动重建算法主要是对一些形变有一定规律的非刚体进行重建,比如人的跑步运动、起立和下蹲动作、说话时的表情动作以及取东西时手的动作等。
这些规律性的动作是非刚体三维运动重建的重点。
三.形状基和轨迹基在非刚体的三维运动重建的早期,都是假设重建目标的真实结构是由一系列不同的基本形状线性组合得来的,也就是形状基的方法。
多方位高分辨率SAR的三维目标自动重建(二)多方位重建
XU n J N - u Fe g I Ya qi ( yLa oa o y o v c t rn n moeS n ig I f r to Ke b r tr f Wa eS at ig a d Re t e sn n o ma in, e Mi ity o n sr f Edua in,Fu a ie st c to d nUn v riy,S a g a 0 4 3,C n ) h n h i2 0 3 hia
t eb i ig o jc—ma e r x r ce r m AR ma e . I a tI ,t e o jc— h ul n b e ti g sa e e ta t d fo S d i g s n p r I h b e t
i a s a e p r m e e ie m ge r a a t rz d,a he p ob biiy d n iy f c i ns o he ore a i n, nd t r a l e st un to f t int to t
Ab ta t Au o tc e o sr cin f t re dme so a sr c t ma i r c n tu t o h e — i n in 1( D) b i ig o jc s o 3 u l n be t d
fo u t— s e t m e rcr s l i n SA R m a e s de eop d I e i s Pa t I r m m lia p c t i— e o uto i g s i v l e . n pr vou r ,
rt m ,t eb i i g o jc sa er c n tu td u ig f l if r t n fo mut—s ih h ul n b e t r e o sr ce sn u l n o ma i r m l a — d o i
基于波束形成原理的三维SAR成像算法研究的开题报告

基于波束形成原理的三维SAR成像算法研究的开题报告一、选题背景及意义合成孔径雷达(SAR)成像技术在军事、民用、科研等领域有着广泛的应用。
常规的SAR技术一般采用固定方向的信号发射和接收,测距精度受到较大限制。
而波束形成SAR则可以通过将低功率的信号聚焦到狭窄的方向区域来实现高精度的成像。
波束形成技术在SAR成像中得到广泛应用,对于需要高精度三维成像的应用场合,波束形成SAR是一种优秀的选择。
二、研究现状与分析目前,有关波束形成SAR成像算法的研究已经相对成熟,包括基于线性扫描的扫描SAR波束形成以及基于非线性扫描的双向波束形成等算法。
但是对于三维SAR成像算法的研究仍然有一定的局限性。
目前,采用基于波束形成技术的三维SAR成像算法仍然存在的问题和挑战,包括复杂的信号处理方法、计算复杂度高等。
三、研究内容及方法本文将从三维SAR成像算法研究的角度入手,采用基于波束形成原理的算法,结合多普勒校正技术等方法,提高数据处理和成像质量,实现高精度的三维SAR成像。
具体研究内容如下:(1)基于波束形成原理的三维SAR成像算法研究。
针对三维SAR 成像的特殊要求,设计适合的波束形成算法,实现高精度的成像目标定位和参数提取。
(2)多普勒校正技术的改进。
消除多普勒效应对成像精度的影响,优化成像结果。
(3)数据处理方法的研究。
对于SAR数据的预处理、滤波器的设计、以及雷达成像系统的参数设置,采用创新的算法和策略,提高数据质量和计算效率。
四、预期研究结果及贡献本文将提出一种新的三维SAR成像算法,基于波束形成原理,实现高精度的目标成像和参数提取。
通过改进多普勒校正技术和数据处理方法,提高成像精度和计算效率。
本文的研究结果将为三维SAR成像技术的发展提供新的思路和方法,对SAR成像技术的发展具有一定的推动意义。
五、研究进度及计划本课题的研究计划如下:第一年:1)对SAR成像技术的基本原理和波束形成技术进行研究和分析;2)设计适合三维SAR成像的波束形成算法,进行仿真和实验验证;3)研究多普勒校正技术,并进行改进和实现;4)对数据处理方法进行研究和设计。
圆周sar共焦三维成像原理与方法研究

圆周sar共焦三维成像原理与方法研究一、概述圆周SAR(Synthetic Aperture Radar)是一种通过合成孔径技术,利用雷达进行成像的方法。
它可以获得地表的高分辨率图像,并在不同方向上进行成像,从而实现全方位的观测。
共焦三维成像是圆周SAR的一种改进方法,可以进一步提高图像的分辨率和质量,使得目标在图像中更加清晰可见。
二、圆周SAR成像原理圆周SAR通过利用雷达的微弱回波信号,合成成一个更大的孔径来实现高分辨率的成像。
其成像原理如下: 1. 雷达发射一束狭窄的微波信号,照射到地表,并接收地表上目标散射回来的微波信号。
2. 接收到的微波信号经过放大、滤波等处理后,记录下回波信号的相位和幅度信息。
3. 将记录下来的回波信号进行时间和空间域的处理,得到一系列的散射中心。
4. 对于每个散射中心,利用相位差比较的方法,计算出它在不同方向上的相位差,从而得到高分辨率的图像。
三、共焦三维成像方法共焦三维成像是一种通过多次圆周SAR的成像结果融合,进一步提高图像质量的方法。
其主要步骤包括: 1. 采集多个不同方向上的圆周SAR成像数据。
2. 对采集到的数据进行回波信号处理和成像处理,得到多个不同方向上的图像。
3. 将多个方向上的图像进行配准,使得它们在空间上对应。
4. 利用配准后的图像,进行共焦处理,消除回波信号中的杂散信息。
5. 对共焦后的图像进行三维重构,得到高质量的三维图像。
四、共焦三维成像的优势共焦三维成像方法相比于传统的圆周SAR方法,在图像质量和分辨率方面具有一定的优势: 1. 共焦处理能够减少图像中的杂散信息,使得目标在图像中更加清晰可见。
2. 通过多次成像数据的融合处理,可以进一步提高图像的分辨率和质量。
3. 共焦三维成像能够提供更加准确的目标位置和形状信息,对于目标识别和定位具有重要意义。
五、圆周SAR共焦三维成像应用领域圆周SAR共焦三维成像方法在很多领域都得到了广泛的应用,主要包括以下几个方面: 1. 军事领域:用于目标侦测、目标跟踪等军事应用,具有抗干扰能力强、远距离探测等优势。
圆周sar共焦三维成像原理与方法研究

圆周sar共焦三维成像原理与方法研究圆周SAR共焦三维成像原理与方法研究随着遥感技术的不断发展,成像技术的要求越来越高。
在此背景下,圆周SAR共焦三维成像技术应运而生。
它是一种基于圆周合成孔径雷达(SAR)技术的成像方法,通过对SAR图像进行三维重建,能获得高分辨率的地图。
本文将详细介绍圆周SAR共焦三维成像技术的原理与方法。
一、原理(一)合成孔径雷达合成孔径雷达是一种通过连续接收雷达回波来“合成”一个比实际天线尺寸更大的天线射线,并通过比实际出现更多地移动,以获得更高分辨率的雷达成像技术。
(二)半径牛顿迭代法半径牛顿迭代法是利用SAR辅助模型解析三维图像的方法。
它根据SAR数据,通过迭代法确定每个像素的高度。
这个过程是通过不断逼近相位差的方法进行的。
(三)共焦成像共焦成像是一种将不同方向的成像技术进行叠加,从而提高成像质量的方法。
具体而言,通过对同一传感器的不同方位成像进行合并,可以获得更完整、更准确的三维成像结果。
二、方法(一)预处理在进行圆周SAR共焦三维成像之前,需要进行预处理。
这包括对原始数据进行滤波、空间抖动校正、坐标转换和图像叠加等环节。
预处理的目的在于优化数据以准备后续的成像算法。
(二)圆周采样和采集采样和采集也是圆周SAR共焦三维成像的重要步骤。
由于采样和采集的高度决定SAR成像质量,因此需要仔细选择采样和采集参数。
圆周SAR采集通过按照固定方向进行Radar波束旋转然后绕着某个轴旋转:(三)成像算法成像算法采用圆周SAR共焦累积方法,使得圆周SAR成像具有更好的对地面物体的辨别能力。
圆周SAR共焦累计对所有视角成像数据进行累积,进而提高图像的分辨率和对比度。
(四)三维重建最后,通过半径牛顿迭代法对累积的数据进行三维重建。
三、应用前景圆周SAR共焦三维成像技术已经在领域中得到广泛应用,包括卫星大地测量、土地利用、城市规划、农业生产、海洋观测等。
在军事领域,这种成像技术可用于制导导弹和军用飞机。
SAR图像建筑物三维信息提取方法研究_邹斌
SA R图像建筑物三维信息提取方法研究邹斌,许可,张腊梅,李慧君(哈尔滨工业大学信息工程系,黑龙江哈尔滨150001)摘要:为了能够从单一SAR图像中提取出建筑物的三维信息,基于SA R成像原理提出了从图像中建筑物叠掩和阴影区域计算平面矩形屋顶尺寸以及高度的方法。
针对SA R平面矩形屋顶建筑物仿真图像,利用灰度直方图信息定位建筑物二次散射区域,通过线灰度累加分割出叠掩和阴影区域,再采用恢复公式计算屋顶尺寸和高度。
实验结果表明,对于具有明显几何形变的平面矩形屋顶建筑物单一SAR图像,此方法有效恢复屋顶尺寸和高度,提高了建筑物检测识别的准确度和精度。
关键词:合成孔径雷达;特征提取;建筑物提取;三维信息中图分类号:T N958文献标识码:A文章编号:1672-2337(2009)02-0095-07Study on Extraction Methods of Three-DimensionInformation of Buildings in SAR ImagesZOU Bin,XU Ke,ZH ANG La-m ei,LI H u-i jun(De par tmen t of I nf ormation Eng inee ring,H arbin I nstitute of T echnolog y,H arbin150001,Ch ina)Abstract:In or der to ex tr act three-dimensio n infor mat ion o f buildings in single SA R images,a w ay t o compute the r oof dimension and heig ht is pr oposed.Based o n SAR imag ing principle,this method uses the infor mation of over lay and shadow ar eas o f building s in SA R images.I n SA R simulation images including buildings w ith flat and r ect ang le ro ofs,do uble scattering a rea o f building s can be o riented by g ray histog ram. T he ov er lay and shado w ar eas can be seg ment ed by g ray accumulat ion in lines,and the ro of dimensio n and height can be co mputed by reco very fo rmula.T he ex per iment results pr ove that this w ay can r eco ver the ro of dimensio n and height effect ively in sing le SAR imag es,including building s w ith f lat and rectang le r oofs which have geo met ric distor tio ns.T he accuracy o f detecting and recog nizing buildings in SA R imag es can be im-pr oved.Key words:synthet ic aper ture radar(SA R);feature ext ractio n;building ex traction;thr ee-dimension infor mation1引言合成孔径雷达(SAR)是一种利用微波进行感知的主动传感器,与光学、红外等其他传感器相比,SAR成像不受天气、光照等条件的限制,具有全天时、全天候、多波段、多极化工作方式、可变侧视角和穿透能力强等特点。
单幅高分辨率SAR图像建筑物三维模型重构研究

摘要:本文研究了利用单幅高分辨率SAR 图像进行建筑物三维模型重构的方法。
首先,介绍了SAR 技术的基本原理和优势。
其次,结合建筑物的特点,提出了建筑物三维模型重构的步骤和方法。
最后,通过实验验证了方法的可行性,结果表明该方法能够有效地重构建筑物的三维模型。
本文为SAR 技术在城市建筑物监测和评估中的应用提供了一种新的思路和方法。
关键词:SAR;建筑物三维模型;高分辨率;模型重构;监测和评估引言:随着城市化进程的加速和城市人口的增长,城市建筑物不断增多。
建筑物的高度、形状、面积等参数对城市规划、监测和评估等方面具有重要意义。
而传统的测量方法,如人工测量、GPS 测量等方法存在着模型不精确、数据量大、耗时长、成本高等问题。
随着合成孔径雷达技术(SAR)的发展,SAR 技术因其具有高分辨率、全天时、全天候等优势,成为了一种重要的建筑物监测和评估技术。
SAR 原理:SAR 技术是一种利用雷达进行成像的技术,其原理是通过发射频带宽度很窄的微波信号并接收反射回来的信号来进行成像。
与光学成像不同,SAR 技术可以在白天和黑夜、晴天和雨天等多种天气条件下进行成像,并且可以得到具有亚米级别分辨率的图像。
建筑物三维模型重构步骤:建筑物三维模型重构过程主要包括以下几个步骤:图像处理、相位解缠、建筑物轮廓提取、三维坐标计算以及三维建模等。
图像处理:首先将SAR 图像进行预处理,包括去噪、辐射校正、几何校正等处理。
相位解缠:利用SAR 图像的相位信息可以重构建筑物的三维模型。
相位的变化决定了物体表面的高度变化,但在图像中被混淆。
因此需要进行相位解缠来还原高度信息。
建筑物轮廓提取:利用图像处理技术提取建筑物在图像中的轮廓,得到建筑物的平面坐标信息。
三维坐标计算:通过建筑物的平面坐标和相位解缠得到建筑物的三维坐标信息。
三维建模:根据建筑物的三维坐标信息,利用三维建模软件对其进行建模,得到建筑物的三维模型。
建筑物三维模型重构方法:建筑物的三维模型重构一般采用两种方法:基于光学影像的方法和基于SAR 影像的方法。
三维重建实际列子讲解
三维重建实验报告1.基于特征点的重建1.1.特征提取由双目立体视觉进行三位重建的第一步是寻找两幅图像中的对应点。
目前人们已经发明了很多二维图像配准算法,比如SIFT, SURF等等。
最新版本的OpenCV 2.2中的features2d库中包含了很多常用的算法,其中特征点定位的算法有FAST, SIFT, SURF ,MSER, HARRIS等,特征点描述算法有SURF, SIFT等,还有若干种特征点匹配算法。
这三个步骤的算法可以任选其一,自由组合,非常方便。
我经过实验,选择了一种速度、特征点数量和精度都比较好的组合方案:FAST角点检测算法+SURF特征描述子+FLANN(Fast Library for Approximate Nearest Neighbors) 匹配算法。
在匹配过程中需要有一些措施来过滤误匹配。
一种比较常用的方法是比较第一匹配结果和第二匹配结果的得分差距是否足够大,这种方法可以过滤掉一些由于相似造成的误匹配。
还有一种方法是利用已经找到的匹配点,使用RANSAC算法求得两幅视图之间的单应矩阵,然后将左视图中的坐标P用单应矩阵映射到右视图的Q点,观察与匹配结果Q’的欧氏距离是否足够小。
当然由于图像是具有深度的,Q与Q’必定会有差距,因此距离阈值可以设置的稍微宽松一些。
我使用了这两种过滤方法。
另外,由于图像有些部分的纹理较多,有些地方则没有什么纹理,造成特征点疏密分布不均匀,影响最终重建的效果,因此我还采取了一个措施:限制特征点不能取的太密。
如果新加入的特征点与已有的某一特征点距离太小,就舍弃之。
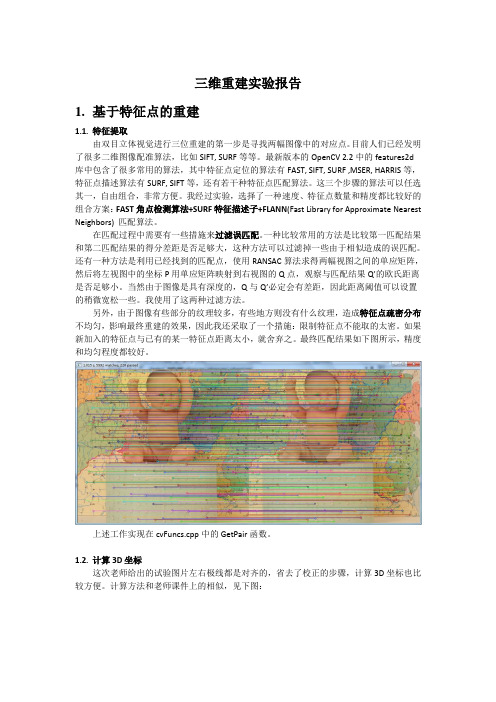
最终匹配结果如下图所示,精度和均匀程度都较好。
上述工作实现在cvFuncs.cpp中的GetPair函数。
1.2.计算3D坐标这次老师给出的试验图片左右极线都是对齐的,省去了校正的步骤,计算3D坐标也比较方便。
计算方法和老师课件上的相似,见下图:如果(x1,y1),(x2,y2)用各自图像上的像素坐标表示,L 和(X,Y,Z)用毫米表示,f 用像素表示的话,用相似三角形的知识就可以推出:211/2/2f Z Lx W x X z fH y Y z fx =--=-=-- 其中W 和H 是图像的宽高(像素数),y 是y1和y2的均值,Z 加负号是为了保持右手坐标系,而Y 加负号是由于图像成像过程中上下发生了倒转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SAR立体三维重建姓名: ******* 学号: ********* 班级: ************* 指导教师: ******1实验目的1、理解基于合成孔径雷达立体像对的灰度信息进行三维重建的基本原理与方法;2、了解ERDAS IMAGINE的基本功能,熟练掌握StereoSAR模块的使用方法;3、理解SAR传感器几何模型及基于地面控制点(Ground Control Points, GCPs)几何模型精化的原理与方法;4、通过真实SAR像对的数据处理,掌握SAR立体三维重建的基本流程。
2实验数据说明本实验采用ERDAS IMAGINE软件的示例数据,RADASAT影像StereoSAR_Ref.img和StereoSAR_Match.img,这两景影像分别拍摄于1996年9月24日和1996年9月17日。
3实验原理经过试验九的操作,使我们对InSAR提取测区DEM有了一定的掌握。
而摄影测量中我们也学习了基于立体像对制作测区三维景观图,因此在此次实验中我们利用摄影测量的原理基于SAR影像进行三维重建。
3.1 SAR立体图像的获取立体图像在摄影测量中称为立体相对。
所谓立体相对是由不同摄站摄取的具有一定重叠的两张相片。
因此雷达立体图像也可以定义为:由天线位置探测获取的具有一定影像重叠的两幅雷达图像[1]。
雷达立体图像的获取方式有两种:同侧立体观测和异侧立体观测。
前者是指飞行器沿着不同的航线飞行(两次飞行方向可以相同或者相反),雷达从地物的一侧对同一地区成像,同侧立体观测有可分为同一高度和不同高度两类;异侧立体观测是指雷达从地物的两侧分别对同一地区成像。
图 3.1-1 雷达立体图像获取方式异侧立体观测获取的雷达立体图像视差明显,基高比(摄影基线与航高之比)大,有利于提高地物目标点高程的测量精度。
但是地形起伏较大的地区,目标地物在立体像对的两幅图像上的相应影像不仅颜色差异很大,而且由于地形起伏引起的几何变形差异也很大。
因为高出地面地物目标的左侧向着左航线的雷达天线,有效反射面积大,影像为浅色调;而对于右航线,该地物目标左侧反射信号弱或者为盲区,所以影像为深色调。
同理,地物目标右侧在两幅图像上的色调与地物目标左侧色调刚好相反,由于异侧飞行所获取的雷达立体图像,使一幅图像上的阴影位于地物目标的一侧,而另一幅图像上的阴影在地物目标的另一侧,这就给立体观察与测量带来了极大的困难。
另外,采用斜距显示的雷达图像由于地形起伏的影响,同一地物目标在立体像对的两幅图像上的变形差异也很大。
因此,异侧(对侧)获取的雷达立体图像,只适于平坦或丘陵而不适合山地的立体观察与测量[2]。
同侧同高度或者不同高度获取的雷达立体图像,视差和基高比虽然比异侧获取的雷达立体图像要小,但两幅图像上相应影像的色调和图像变形差异较小,只要对雷达工作参数进行适当选择,还是能获得较好的立体效应的,故在丘陵地、山地一般都采用同侧获取雷达立体图像进行地物目标的三维定位和立体测图[2]。
3.2 SAR立体图像的视差SAR立体图像的视差指高出某一基准面的地物目标在两幅图像上的位移差。
摄影测量中称之为立体像对的左右视差,是地物目标点高差的反应,由左右视差可以推算出地物目标点间的高差。
雷达图像有地距显示和斜距显示两种方式,因此视差(AP)与高差(Ah)的关系相应地有两种表达方式[3]。
1、地距显示图像的视差与高差关系对于地距显示的雷达图像,视差(p ∆)与高差(h ∆)的关系为:/(''')h m p c t g c t g θθ∆=∆ (式3.2-1) 式中,'θ和''θ分别为天线'S 和''S 扫描至地物目标A 的视角,m 为像比例尺分母。
2、斜距显示图片的视差与高差关系/(cos ''cos ')h m p θθ∆=∆ (式3.2-2) 从上面两式中可以看出,高差不仅与视差有关,而且与视角也有关。
就视差而言,侧视观测的SAR 立体图像的视差值比同侧观测的立体图的视差值要大,在图像清晰程度相当的情况下,视差值越大,立体观测效果就越好[3]。
3.3 SAR 立体图像的基高比摄影测量中的基高比指摄影基线(立体像对的两个摄影站间的连线)与航高之比,基高比反应了空间交会图像的好坏,基高比越大,测定地物目标点的高程精度越高。
同理,SAR 图像的基高比指两幅图像获取时飞机或者卫星运行轨道间的距离(B)与航高(H)之比。
对于地距显示的SAR 立体图像,其基高比为:'''B c t g c t g H θθ= (式 3.3-1)对于斜距显示的SAR 立体图像,其基高比为:c o s ''c o s 'B H θθ= (式3.3-2)无论是地距显示或者斜距显示的SAR 立体图像,异侧观测的SAR 立体图像,其基高比比同侧观测的SAR 立体图像大。
这就意味着由异侧观测的SAR 立体图像所测定的地物目标点的高程精度,比同侧观测方式测定的目标点的高程精度高。
3.4 SAR 立体定位原理利用SAR 图像进行立体定位获取DEM 通常有三种方法:距离-多普勒模型、基于摄影测量理论的等效共线方程模型和视差高程相关模型。
在本次试验中我们采用的是摄影测量的方式,即通过定向参数解算、立体交会等环节实心地面的点的定位。
立体SAR 图像定位是利用构成立体的两幅SAR 图像,依据相应的定向参数,由同名像点交会计算出相应地面点的三维坐标。
具体的定位流程如图所示:图 3.4-1 立体SAR 图像定位流程其中:1、定向参数通常由地面的控制点根据SAR影像的成像模式来求解,在无法获取地面控制点的情况下,可以通过轨道参数和SAR系统参数等获取定向参数(本此实验中是利用地面控制点获取的定向参数,具体处理流程如图所示)。
图 3.4-2 定向参数解算流程2、地面点的三维坐标解算是根据SAR成像模式,建立同名像点对应的关系,具体流程如图所示:图 3.4-3 地面点三维坐标解算流程3.5 影响SAR立体测量精度的因素对于SAR立体测量的精度,其影响因素主要包括:定向参数的精度、近距离边量测精度、同名点像点坐标测量精度、立体图像交会角、地形特征等等。
1、定向参数的精度定向参数的精度主要取决于地面控制点的测量精度,一般如果地面控制点的测量精度高于所要求的精度,则引入地面控制点,否则直接利用传感器平台的轨道参数及求解。
2、近距离边量测的精度近距离边长的测量误差主要是对定向参数解算精度和前方交会精度产生影响,从而影响SAR立体定位精度。
研究表明,一条航线的近距离边长对一幅雷达影像方位向和距离向误差变化影响很小,对航高的计算值影响相对较大,与此相关的雷达侧视角度和雷达立体交会角对立体定位精度都有不同程度的影响。
从理论上来讲,在近距离边长量测误差相同的情况下,异侧立体定位精度比同侧立体高,且侧视角越小越利于高程定位,但侧视角太小会使得雷达图像上存在失真而不利于同名点的量测,导致立体定位精度降低。
所以使用SAR立体定位获取DEM,对SAR图像的质量、立体交会角的要求比其他传感器图像都要高。
3、地形特征地形的不同类型与SAR图像几何特征一样,对于雷达立体定位都是至关重要的,地形特征也是影响雷达立体定位精度的一个重要因素。
这里的地形特征主要包括地形坡度因子(slope)和坡度朝向(aspect)。
SAR图像获取时,对具有一定坡度的地物目标,在成像时有前坡和背坡两种情况,并且与雷达迭掩、雷达阴影等SAR图像几何畸变特征密切相关。
因此,坡度因子和和坡度朝向对雷达立体定位的影响较为复杂,甚至能够引起严重的SAR图像畸变,使影像匹配变得更加困难,从而降低立体定位精度。
4 实验过程为了能够更好的理解,将ERDAS的IMAGINE StereoSAR DEM模块处理流程展示如图所示:图4-1 ERDAS IMAGINE StereoSAR DEM 流程图本次实验是在8.7版本上所进行的。
4.1 新建工程在ERDAS的上方的工具栏中,依次点击:Radar||StereoSAR,得到新建项目界面如图所示:图 4.1-1 新建工程然后再对应的文件夹下创建工程并命名。
然后出现立体测图界面如图所示:在SteroSAR工作面板中,左边竖向列出了数据处理中的每一步名称,同时红色箭头指示的是当前工作的数据处理步骤,在中间部分的是当前处理步骤的基本内容。
其中左侧的进度依次表示:Input(输入影像)、Subset(裁剪)、Despeckle(滤波处理)、Degrade(去噪/第一次降采样处理)、Register(配准)、Match(影像匹配)、Degrade(第二次降采样)Height(高程计算)、4.2 影像输入新建项目后,在中间面板区域依次点击两个图标,导入参考影像和匹配影像,导入后在下方会出现影像的基本信息如图所示:图 4.2-1 影像导入ERDAS IMAGINE StereoSAR DEM模块允许用地面控制点来纠正传感器参数。
由于轨道精度较高,因此,如果没有较高精度的GCPs,不必进行纠正。
一般,从1:24000地形图上选取的点或GPS测得的控制点能满足要求。
并且,分布均匀的控制点能够得到更好的总体效果和更低的误差。
由于示例数据中有较高精度的GCPs,可以进行轨道纠正。
点击中间面板中图标,并在弹出的对话框中选择GCPs File选项,如图所示:图 4.2-2 加载gcc文件点击OK之后打开Filename选择对话框,选择StereoSAR_USGS_Ref.gcc文件(地面控制点信息)并打开。
如下图所示:图 4.2-3 GCP采集界面从下方的工具栏中,依次点击File||Load input,打开StereoSAR_ref_Control.gcc文件(GCP的影像坐标信息,将在X Input、Y Input 列中显示)。
然后点击右面工具面板中的几何模型构建按钮,开始平差处理并得到解算精度,如图所示(单位为米):图 4.2-4 卫星轨道参数纠正另一幅影像的轨道纠正类似处理。
处理完后点击左下角的按钮执行该操作,在Input进度按钮处出现一个对勾如图所示,表示该操作以完成;图 4.2-5 Input 进度完成点击Next进入裁剪步骤。
4.3 裁剪进入影像裁剪界面如图所示:图 4.3-1 裁剪界面裁剪选项使得使用时直观的,没有必要对两幅影像的子集定义精确到相同的区域,大致相同就可以了。
该步骤是在两种情况下使用的:一是定义一个较小的影像范围可以用来测试相关参数,进而进行整景影像的计算;二是它可以用来限制两幅影像的范围以及重叠区域。
限制输入的范围能够有效的节省数据空间。