实验一 基于Matlab的控制系统模型
一种基于Matlab的无刷直流电机控制系统建模仿真方法

一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
实验报告
实验一基于Matlab的单容液位模糊控制系统仿真一、实验目的1、熟悉Matlab基础知识和模糊推理系统编辑器。
2、加深对模糊控制的理解。
3、加强模糊控制在实践中的应用。
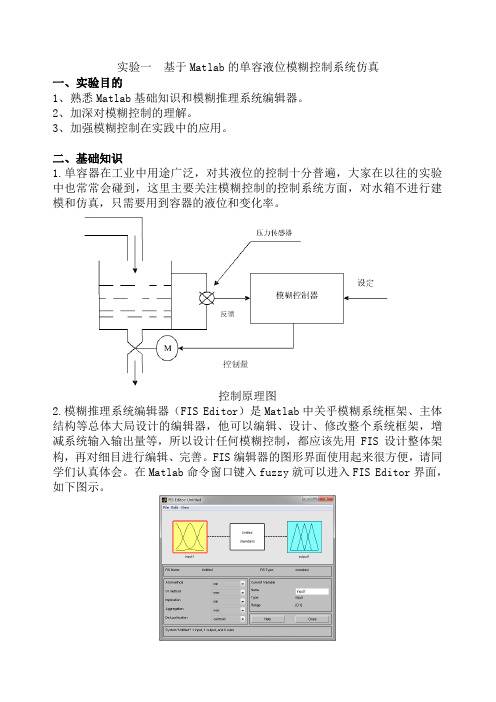
二、基础知识1.单容器在工业中用途广泛,对其液位的控制十分普遍,大家在以往的实验中也常常会碰到,这里主要关注模糊控制的控制系统方面,对水箱不进行建模和仿真,只需要用到容器的液位和变化率。
控制原理图2.模糊推理系统编辑器(FIS Editor)是Matlab中关乎模糊系统框架、主体结构等总体大局设计的编辑器,他可以编辑、设计、修改整个系统框架,增减系统输入输出量等,所以设计任何模糊控制,都应该先用FIS设计整体架构,再对细目进行编辑、完善。
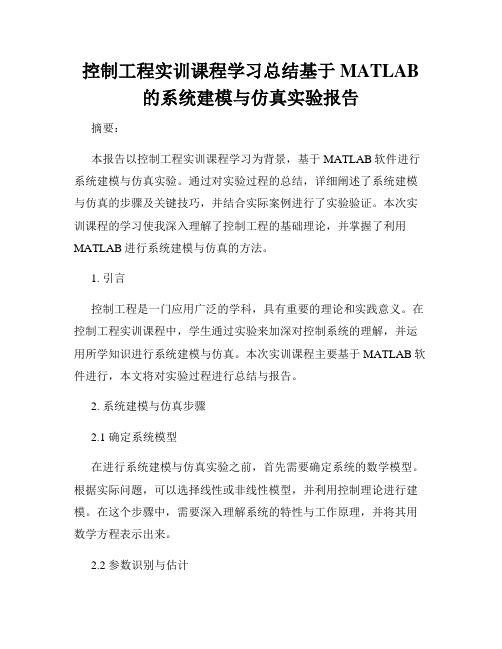
FIS编辑器的图形界面使用起来很方便,请同学们认真体会。
在Matlab命令窗口键入fuzzy就可以进入FIS Editor界面,如下图示。
图1三、实验内容1.打开模糊逻辑工具箱的图形界面,新建一个Mamdani模糊推理模型。
键入fuzzy打开图形界面,默认即为Mamdani模型。
2.增加一个输入变量,将输入变量命名为level、rate,输出变量为valve,这样就定义了两输入单输出模糊推理系统,保存为tank0.fis。
3.设计模糊化模块:将输入变量rate的论域设为[-0.1,0.1],另外两个变量采用默认论域[-1,1]不变。
通过增加隶属度函数来划分模糊空间:(1)输入变量level划分三个模糊集:low、okay和high,隶属度函数均为高斯函数,参数分别为[0.3 -1]、[0.3 0]、[0.3 1]。
(2)输入变量rate划分三个模糊子集:negative、zore和positive,隶属度函数均为高斯函数,参数分别[0.03 -0.1]、[0.03 0]、[0.03 1]。
(3)输出变量valve划分为五个模糊集:close_fast、close_slow、no_change、open_slow和open_fast,隶属度函数均为三角形函数,参数分别为[-1 -0.9-0.8]、[-0.6 -0.5 -0.4]、[-0.1 0 0.1]、[0.2 0.3 0.4 ]、[0.8 0.9 1]。
matlab tf、ss、和zpk的控制系统建模实验心得

matlab tf、ss、和zpk的控制系统建模实验心得1. 引言1.1 概述控制系统建模是设计和分析工程系统的重要步骤之一。
在这个过程中,我们需要选择适当的数学模型来描述系统的行为,并使其与实际物理现象相匹配。
MATLAB作为一个功能强大的工具,提供了多种方法来进行控制系统建模,其中包括传递函数模型(TF)、状态空间模型(SS)和零极点增益模型(ZPK)。
本文旨在总结和分享我在使用MATLAB中的TF、SS和ZPK进行控制系统建模实验中的经验和心得。
1.2 文章结构本文将按照以下结构展开讨论:- 第二部分将介绍在MATLAB中使用TF进行控制系统建模时的一些重要事项,包括理解传递函数模型以及如何建立该模型。
- 第三部分将介绍使用SS进行控制系统建模时所需注意的事项,包括理解状态空间模型和建立该模型的步骤。
- 第四部分将介绍使用ZPK进行控制系统建模时需要注意的事项,包括理解零极点增益模型和如何建立该模型。
最后,在第五部分中,将对TF、SS和ZPK三种建模方法进行比较,并总结心得体会,并对未来的研究方向进行展望。
1.3 目的本文的目的是帮助读者更好地理解和掌握MATLAB中TF、SS和ZPK建模方法,以便能够准确描述和分析控制系统的行为。
通过分享我的实验心得,我希望能够给读者提供一些在实际应用中使用这些模型时的指导和启示。
让我们开始吧!2. MATLAB中的TF模型建模实验心得2.1 理解传递函数模型在MATLAB中,传递函数(Transfer Function)是一种常用的控制系统建模方法。
它用于描述输入和输出之间的关系,并包含了系统的动态特性。
在进行TF 模型建模时,我们首先需要理解传递函数的含义和作用。
传递函数是指将系统的频率响应与拉普拉斯变换联系起来的函数表达式。
通过分子多项式和分母多项式的比值来表示系统,并使用频率域表达,可以方便地分析系统性能、稳定性以及设计控制器等。
2.2 建立传递函数模型的步骤在MATLAB中,建立传递函数模型可以遵循以下步骤:步骤1:确定系统的数学模型。
控制工程实训课程学习总结基于MATLAB的系统建模与仿真实验报告
控制工程实训课程学习总结基于MATLAB 的系统建模与仿真实验报告摘要:本报告以控制工程实训课程学习为背景,基于MATLAB软件进行系统建模与仿真实验。
通过对实验过程的总结,详细阐述了系统建模与仿真的步骤及关键技巧,并结合实际案例进行了实验验证。
本次实训课程的学习使我深入理解了控制工程的基础理论,并掌握了利用MATLAB进行系统建模与仿真的方法。
1. 引言控制工程是一门应用广泛的学科,具有重要的理论和实践意义。
在控制工程实训课程中,学生通过实验来加深对控制系统的理解,并运用所学知识进行系统建模与仿真。
本次实训课程主要基于MATLAB软件进行,本文将对实验过程进行总结与报告。
2. 系统建模与仿真步骤2.1 确定系统模型在进行系统建模与仿真实验之前,首先需要确定系统的数学模型。
根据实际问题,可以选择线性或非线性模型,并利用控制理论进行建模。
在这个步骤中,需要深入理解系统的特性与工作原理,并将其用数学方程表示出来。
2.2 参数识别与估计参数识别与估计是系统建模的关键,它的准确性直接影响到后续仿真结果的可靠性。
通过实际实验数据,利用系统辨识方法对系统的未知参数进行估计。
在MATLAB中,可以使用系统辨识工具包来进行参数辨识。
2.3 选择仿真方法系统建模与仿真中,需要选择合适的仿真方法。
在部分情况下,可以使用传统的数值积分方法进行仿真;而在其他复杂的系统中,可以采用基于物理原理的仿真方法,如基于有限元法或多体动力学仿真等。
2.4 仿真结果分析仿真结果的分析能够直观地反映系统的动态响应特性。
在仿真过程中,需对系统的稳态误差、动态响应、鲁棒性等进行综合分析与评价。
通过与理论期望值的比较,可以对系统的性能进行评估,并进行进一步的优化设计。
3. 实验案例及仿真验证以PID控制器为例,说明系统建模与仿真的步骤。
首先,根据PID控制器的原理以及被控对象的特性,建立数学模型。
然后,通过实际实验数据对PID参数进行辨识和估计。
《MATLAB与控制系统仿真》实验报告
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
基于MATLAB控制系统仿真实验报告
tf 4
y0
0 1
6、求出 G1(s)
2 (s2 2s 1) 与 G2 (s)
1 (2s3
3s2
1)
的单位阶跃响应,并分别
求出状态空间模型。
解:(1) G1(s) 2 (s2 2s 1) 的状态空间模型求解如下:
function shiyan2 b1=[2];
D(z)
0.62(1 0.136z 1)(1 0.183z (1 0.045z 1)(1 0.53z 1)
1 )
分别用仿真算法得到系统在单位阶跃输入作用下的响应,系统在单位速度输
入是的输出响应。
解:(1)首先将 W1(s)转换为 W1(z),采样周期 T=0.2s,程序清单如下: function shiyan42 num=[10];den=[0.005 0.15 1 0]; ts=0.2;[nc,dc]=c2dm(num,den,ts)
INTRO(注意:intro 为一个用 MATLAB 语言编写的幻灯片程序,主要演示
常用的 MATLAB 语句运行结果。)
然后,根据现实出来的幻灯片右面按钮进行操作,可按 START——NEXT—
—NEXT 按钮一步步运行,观察。
3、自编程序并完成上机编辑,调试,运行,存盘:
(1)用 MATLAB 命令完成矩阵的各种运算,例如:
5、利用 ode23 或 ode45 求解线性时不变系统微分方程 y(t) Ay(t) ,并绘制出 y(t)
曲线,式中
A
0.5
1
1 0.5
t t0 t 如下: function xdot=fun21(t,x) A=[-0.5 1;-1 -0.5]; xdot=A*x; function fzsy22 t0=0;tf=4;tol=1e-6; x0=[0;1];trace=1; [t,x]=ode23('fun21',t0,tf,x0,tol,trace); plot(t,x) 得到的实验结果如下图所示:
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
实验一基于Matlab地控制系统模型
实验一 基于Matlab 的控制系统模型姓名 学号 班级一、实验目的1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法。
2) 学习使用Matlab 进行各类数学变换运算的方法。
3) 学习使用Matlab 建立控制系统模型的方法。
二、实验原理1. 香农采样定理对一个具有有限频谱的连续信号f (t )进行连续采样,当采样频率满足ωs ≥ωmax 时,采样信号f *(t )能无失真的复现原连续信号。
(1) 作信号f (t )=5e 10t 和f *(t ) =5e 10kT 的曲线,比较采样前后的差异。
0.050::0.55*(10*)subplot(2,1,1)plot(,)gridsubplot(2,1,2)stem(,)gridT t T f exp t t f t f ===- 请改变采样周期T ,观察不同的采样周期下的采样效果。
将采样周期变小,采样点变多(2) 频谱曲线250:1:505./(100.^)(,)w F sqrt w plotw F grid=-=+若|F (j ωmax ) |=0.1|F (0)|,选择合理的采样周期T 并验加以证。
222400:20:4002002*/05/*(1./(100.^))15/*(1./(100().^))25/*(1./(100().^))(,0,,1,,2)w ws Ts pi wsF Ts sqrt w F Ts sqrt w ws F Ts sqrt w ws plot w F w F w F grid=-===+=+-=++请改变采样频率,观察何时出现频谱混叠?2. 拉式变换和Z 变换(1) 使用Matlab 求函数的拉氏变换拉式变换: 反拉氏变换:()()()()()()()()()()222 1exp -*1223*exp -*34sin *45s 11/(1)21/()(2)31/(3)4/exp -**cos *(5)syms a w t f a t laplace f f t laplace f f t a t laplace f f w t laplace f f a t w t lap yms s a f s ilaplace f f s a ilaplace f f s ilap lace f lace f f w s w ila ====+===+==2(4)51/(*(2)*(3))(5)place f f s s s ilaplace f =++(2) 使用Matlab 求函数的Z 变换Z 变换: 反Z 变换:2s 1/(1)1(**)(1)(1)2/((*))2*(2)(2)3**(**)3*/(1)(3)4(**)(4) 5(5)kyms z a T f z z f exp a k T iztrans f ztrans f f z z exp a T f k Tiztrans f ztrans f f k T exp a k T f T z z ztrans f f sin a k T ztrans f f a ztrans f syms a k t=-=-=--==-=-==2(3)4/()(4)5/((2)*(3))(5)iztrans f f z z a iztrans f f z z z iztrans f =-=++3. 控制系统连续、离散数学模型的建立与转化 传递函数模型:112m 112+()+mm n n nb s b s b num G s den a s a s b --++==++L L …… 零极点增益模型:1212()()()()()()()m n s z s z s z G s ks p s p s p ---=---L L(1) 根据传递函数模型分别建立连续系统模型22(1)()(2)(3)56s s s sG s s s s s ++==++++和离散系统模型22(1)()(2)(3)56z z z zG z z z z z ++==++++[1,1,0][1,5,6]0.11(,)1(,,)num den T Gs tf num den Gz tf num den T =====(2) 分别建立连续、离散系统的零极点模型[0,-1][-2,-3][1]0.11(,,)1(,,,)z p k T Gs zpk z p k Gz zpk z p k T ======(3) 传递函数模型转化为零极点模型[1,1,0][1,5,6]0.11(,)1(,,)[,,]2(,)2(,,)2(,,,)num den T Gs tf num den Gz tf num den T z p k tf zp num den Gs zpk z p k Gz zpk z p k T ========(4) 零极点模型转化为传递函数模型[0,-1][-2,-3][1]0.11(,,)1(,,,)[,]2(',',)2(,)2(,,)z p k T Gs zpk z p k Gz zpk z p k T num den zp tf z p k Gs tf num den Gz tf num den T =========(5) 连续传递函数模型转换为离散模型[1,1,0][1,5,6]0.1(,)2(,,'')num den T Gs tf num den Gz c d Gs T zoh =====%'zoh' 零阶保持器[0,-1][-2,-3][1]0.1(,,)2(,,'')z p k T Gs zpk z p k Gz c d Gs T zoh ======(6) 离散传递函数模型转换为连续模型[1,1,0][1,5,6]0.1(,,)2(,'')num den T Gz tf num den T Gs d c Gz zoh =====三、实验步骤1)根据参考程序,验证采样定理、拉氏变换和Z 变换、控制系统模型建立的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 基于Matlab 的控制系统模型
姓名 学号 班级
一、实验目的
1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法。
2) 学习使用Matlab 进行各类数学变换运算的方法。
3) 学习使用Matlab 建立控制系统模型的方法。
二、实验原理
1. 香农采样定理
对一个具有有限频谱的连续信号f (t )进行连续采样,当采样频率满足ωs ≥ωmax 时,采样信号f *(t )能无失真的复现原连续信号。
(1) 作信号f (t )=5e 10t 和f *(t ) =5e 10kT 的曲线,比较采样前后的差异。
0.05
0::0.5
5*(10*)
subplot(2,1,1)
plot(,)
grid
subplot(2,1,2)
stem(,)
grid T t T f exp t t f t f ===-
请改变采样周期T ,观察不同的采样周期下的采样效果。
(2) 频谱曲线
50:1:50
5./(100.^2)
(,)w F sqrt w plot w F grid
=-=+
若|F (j ωmax ) |=0.1|F (0)|,选择合理的采样周期T 并验加以证。
400:20:400
200
2*/05/*(1./(100.^2))
15/*(1./(100().^2))
25/*(1./(100().^2))
(,0,,1,,2)
w ws Ts pi ws
F Ts sqrt w F Ts sqrt w ws F Ts sqrt w ws plot w F w F w F grid
=-===+=+-=++
请改变采样频率,观察何时出现频谱混叠?
2. 拉式变换和Z 变换
(1) 使用Matlab 求函数的拉氏变换
拉式变换: 反拉氏变换:
()()()()()()2
222 1exp -*123*exp -*4sin *5exp -*s 11/(1)
21/()31/4/()
51/(*(2)*(*c 3)o )
s *yms syms a w t f a t laplace f f t f t a t f s a
f s
ilaplace f f s a f s f w s w f s s s w t f a t w t ==+==+====++==
(2) 使用Matlab 求函数的Z 变换
Z 变换: 反Z 变换:
2
2s 1/(1)
1(**)(1)
(1)2/((*))2*3**(**)3*/(1)4(**)4/(55/((2)* (3 ))
k yms z a T
f z z f exp a k T iztrans f ztrans f f z z exp a T f k T f k T exp a k T f T z z f sin a k T f z sym z a
f a f s z z a k t z =-=-=--==-=-==-==++
3. 控制系统连续、离散数学模型的建立与转化
传递函数模型:
1
12m
1
12+()+m
m n n n
b s b s b num
G s den a s a s b --++==++ ……
零极点增益模型:
1212()()()
()()()()
m n s z s z s z G s k s p s p s p ---=---
(1) 根据传递函数模型分别建立连续系统模型
22(1)()(2)(3)56s s s s
G s s s s s ++==++++
和离散系统模型
2
2(1)()(2)(3)56z z z z
G z z z z z ++==++++
[1,1,0]
[1,5,6]
0.11(,)
1(,,)
num den T Gs tf num den Gz tf num den T =====
(2) 分别建立连续、离散系统的零极点模型
[-2,-3]
[1]
0.11(,,)
1(,,,)
p k T Gs zpk z p k Gz zpk z p k T =====
(3) 传递函数模型转化为零极点模型
[1,1,0]
[1,5,6]
0.1
1(,)
1(,,)[,,]2(,)
2(,,)
2(,,,)
num den T Gs tf num den Gz tf num den T z p k tf zp num den Gs zpk z p k Gz zpk z p k T ========
(4) 零极点模型转化为传递函数模型
[0,-1]
[-2,-3]
[1]
0.1
1(,,)
1(,,,)
[,]2(',',)
2(,)
2(,,)
z p k T Gs zpk z p k Gz zpk z p k T num den zp tf z p k Gs tf num den Gz tf num den T =========
(5) 连续传递函数模型转换为离散模型
[1,1,0]
[1,5,6]
0.1(,)
2(,,'')
num den T Gs tf num den Gz c d Gs T zoh =====
%'zoh' 零阶保持器
[-2,-3]
[1]
0.1
(,,)
2(,,'')
p k T Gs zpk z p k Gz c d Gs T zoh =====
(6) 离散传递函数模型转换为连续模型 [1,1,0]
[1,5,6]
0.1
(,,)
2(,'')num den T Gz tf num den T Gs d c Gz zoh =====
三、实验步骤
1) 根据参考程序,验证采样定理、拉氏变换和Z 变换、控制系统模型建立的方法。
2) 观察记录输出的结果和图形,与理论计算结果相比较。
3) 自行选则相应的参数,熟悉上述各指令的运用方法。
四、实验报告
1) 按照实验报告所要求的统一格式,填写实验报告;
2) 记录实验过程、实验结果和图表。
3) 根据实验过程和结果进行分析。