无人机硬件与结构设计课件
合集下载
无人机PPT课件
2021
观察野生动物 气象监测 物流运输 自拍
6
无人机 基本结构
GPS
机身
电池
减震
云台
脚架
2021
螺旋桨 电调
电机
7
森瑟无人机 高性能
三
抗八级风超稳定飞行
千
米
高
抗中雨以下严酷飞行
空
Байду номын сангаас
飞 行
5公斤载重 一小时超长飞行
准
十分钟快充满电 支持连续作业
确
定 高
-10 ~ 50℃ 的超宽工作温度范围 2021
8
HAPPY WORK
THANKS
2021
9
无人机
基础知识
UAV Basic knowledge
2021
1
CONTENTS 内容
无人机 历史 无人机 优势 无人机 应用领域分类 无人机 用途 无人机 基本性能 森瑟无人机 高性能
2021
2
无人机 历史
HISTORY
1914年第一次世界大战,英国的卡德尔和皮切尔两位将军向英 国军事航空学会提出,:研制一种不用人驾驶,而用无线电操纵 的小型飞机
这种大胆的设想立即得到当时英国军事航空学会理事长戴·亨德 森爵士赏识。他指定由A.M.洛教授率领一班人马进行研制
无人机的初始使命作为训练用的靶机使用的
2021
3
无人机 优势
APPLICATION SCENE
应用场景
高空 有毒 危险 隐蔽 长时间
ADVANTAGE
无人机 优势
PRODUCT ADVANTAGES
产品优点
高效 安全 无差错 成本低廉 高精准度
《无人机基础》课件

3
超级连接
利用5G网络和云计算等技术,实现智能高效的协作和管理,创造全面联动的调度系统。
无人机的优势与挑战
无人机可以带来许多好处和机会,但它们也面临着许多挑战和限制。
优势
快速高效的交付和运输,监测和控制环境,提高工 作效率和质量。
挑战
安全问题和技术限制,监管和政策法规的规范性, 商业模式和市场需求的变化。
相机
捕捉场景,提供实时图像或视频,支持遥感和测量
无人机的工作原理
无人机根据预设的飞行计划,通过遥控或程序控制,利用飞控系统控制电机的转速和方向,实现飞行。
起飞和着陆
无人机在航线规划后通过自主起飞,寻找合适的着陆场地降落。
导航和避障
无人机通过GPS或其他定位技术,实现定点飞行、跟随和避障功能。
姿态控制和稳定
多旋翼无人机
采用多个旋翼的设计,类似于四轴或六轴,兼顾了稳定性和机动性能。
无人机的组成
无人机由多个部件组成,包括飞控系统、电机、电池、传感器、相机等。
飞控系统
读取传感器数据,控制电机旋转,维持飞行状态。
电机
接收控制信号,通过旋转螺旋桨产生推力,控制高 度和方向。
电池
为无人机提供电源,维持电路运行,决定了单次飞
《无人机基础》PPT课件
欢迎大家来到无人机基础课程。无人机是一种快速发展的技术,它们正在改 变我们的生活和未来。
无人机的定义与分类
无人机,也称为无人驾驶飞行器,是没有乘客搭载的飞行器。它们根据自身能力进行控制和飞行。
固定翼无人机
采用翼的设计,类似于传统飞机,可以长时间飞行。
旋翼无人机
采用旋翼的设计,类似于直升机,可以在低空悬停,并非常灵活。
无人机的安全与法律
无人机零部件及其功能介绍 ppt课件
显示端 接收天线
显示端:可以配置iPad、安卓机和苹果手机等,或者大疆精灵
4Pro V2.0版本自带的高亮显示屏
ppt课件
11
遥控器
显示器托架
电源键
天线 摇杆
遥控器是用来对无人机飞行动作进行控制的部件,主要包 括电源键、摇杆、天线和几个快捷键
ppt课件
12
无人机分类
飞行器分类 稳定性
固定翼 自稳定
续航时间
长
直升机
不稳定,完整驱 动
多旋翼
不稳定,欠驱 动
中
短
飞行效率 荷载 其他
高
大
起飞助跑,降 落滑行
中
中
可垂直起降, 机械结构复杂
低
小
可垂直起降, 机械结构简单
ppt课件
13
无人机分类
无人机 重量分 类(按 民航法 规)
微型:0kg-7 kg 轻型:7 kg-116 kg 小型:116 kg -5700 kg 重型(大型):5700kg以上
无人机零部件及其功能介绍
总体结构介绍 动力系统 机身系统 机载系统 图传系统 遥控器
无人机分类
多旋翼无人机历史
无人机应用
无人区使用注意 事项
ppt课件
禁飞区
3
总体结构介绍
飞控系统
螺旋桨
图传系统
电机 机架
起落架
电调
相机
云台
智能电池
ppt课件
遥控器
4
动力系统
螺旋桨:无人机产生推力的最主要部件,
四旋翼无人机一般搭配4个螺旋桨,其中两 个正方向,两个反方向
ppt课件
Hale Waihona Puke 5电机:多旋翼无人机的电机多采用无刷直流电动机,
无人机结构与系统组成 PPT
无人机结构与系统组成
S7-200 PLC
S7-300 PLC
S7-400 PLC
S7-200 PLC
S7-300 PLC
S7-400 PLC
(1)与CPU312 IFM和CPU313配套的模块只能 安装在一个机架上。 (2)除了电源模块、CPU模块和接口模块外, 一个机架上最多只能再安装8个信号模块或功能 模块。 (3)CPU314/315/315-2DP最多可扩展4个机 架。 (4)IM360/IM361接口模块将S7-300背板总 线从一个机架连接到下一个机架。
需要注意的,此尺寸是指定子的,不是指电机外型尺寸,电机壳的厚度、散热糟形、底座高度等都 影响电机外型尺寸,所以用定子尺寸做功率的判断比用外型尺寸要标准和靠谱。
休息10分钟, 大家把每日健康数据填报一下。 10:05继续。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机 无刷电机的性能指标之二:
➢ 电子调速器 电调的连接: 电调的输入线与电池连接; 电调的输出线(无刷三根)与电机连接; 电调的信号线与接收机连接。
电调一般有输出功能(BEC),即在信号线的正负极之间有5V左右的电 压输出,通过信号线为接收机和舵机供电。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电子调速器
电源
电调
电机
锂聚合物电池
正极(+):导电高分子聚合物 负极(-):锂金属或锂碳层间化合物 电解质:固态或胶态高分子电解质
1.2 无人机动力系统 1.2.1 电动动力系统
➢ 电池
优点: 1.没有多余的电解液,因此它更可靠更稳定。 2.采用铝塑包装,内部出现问题可立即通过外包装表现出来,即鼓胀。 3.具备高分子材料所特有的质量轻、弹性好、易成膜等特性,也顺应了化学电源质量
S7-200 PLC
S7-300 PLC
S7-400 PLC
S7-200 PLC
S7-300 PLC
S7-400 PLC
(1)与CPU312 IFM和CPU313配套的模块只能 安装在一个机架上。 (2)除了电源模块、CPU模块和接口模块外, 一个机架上最多只能再安装8个信号模块或功能 模块。 (3)CPU314/315/315-2DP最多可扩展4个机 架。 (4)IM360/IM361接口模块将S7-300背板总 线从一个机架连接到下一个机架。
需要注意的,此尺寸是指定子的,不是指电机外型尺寸,电机壳的厚度、散热糟形、底座高度等都 影响电机外型尺寸,所以用定子尺寸做功率的判断比用外型尺寸要标准和靠谱。
休息10分钟, 大家把每日健康数据填报一下。 10:05继续。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机 无刷电机的性能指标之二:
➢ 电子调速器 电调的连接: 电调的输入线与电池连接; 电调的输出线(无刷三根)与电机连接; 电调的信号线与接收机连接。
电调一般有输出功能(BEC),即在信号线的正负极之间有5V左右的电 压输出,通过信号线为接收机和舵机供电。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电子调速器
电源
电调
电机
锂聚合物电池
正极(+):导电高分子聚合物 负极(-):锂金属或锂碳层间化合物 电解质:固态或胶态高分子电解质
1.2 无人机动力系统 1.2.1 电动动力系统
➢ 电池
优点: 1.没有多余的电解液,因此它更可靠更稳定。 2.采用铝塑包装,内部出现问题可立即通过外包装表现出来,即鼓胀。 3.具备高分子材料所特有的质量轻、弹性好、易成膜等特性,也顺应了化学电源质量
无人机结构与系统组成 PPT
飞控
接收机
螺旋桨
• 电调输入端的红线、黑线需并联接到电池的正负极上,其输出端的3根黑线连接到电动机;其BEC 信号输出线,用于输出5V电压给飞控供电和接收飞控的控制信号;遥控接收机连接在飞控上,输 出遥控信号,并同时从飞控上得到5V供电。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机
直流电动机是目前无人机使用最多、应用最广的动力装置。
➢ 不能通过KV比较电机的好坏,不能说KV380的比KV600的好。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电池
作用:为电动机的运转提供电 能。
镍氢电池
镍铬电池
锂聚合物电池
重量重、能量密度低,渐被淘汰
能量高、小型化、轻量化,主流
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电池
电池三要素:正极、负极、电解质
需要注意的,此尺寸是指定子的,不是指电机外型尺寸,电机壳的厚度、散热糟形、底座高度等都 影响电机外型尺寸,所以用定子尺寸做功率的判断比用外型尺寸要标准和靠谱。
休息10分钟, 大家把每日健康数据填报一下。 10:05继续。
1.2 无人机动力系统
1.2.1 电动动力系统
➢ 电动机 无刷电机的性能指标之二:
➢ 机翼 ➢ 机身 ➢ 尾翼 ➢ 起落装置 ➢ 动力装置
1.1 无人机的基本结构 1.1.2 多旋翼无人机的基本结构
1.1 无人机的基本结构
1.1.3 无人直升机的基本结构
➢ 机身 ➢ 主旋翼 ➢ 尾桨 ➢ 操纵系统 ➢ 传动系统 ➢ 电动机或发动机 ➢ 起落架
1.2 无人机动力系统
无人机动力系统
相同点:2212、2205、2213 1000KV、2300KV、920KV
无人机结构与系统课件:无人机结构与飞行原理

1.2.3飞行控制
图1-12 俯仰运动
3.滚转运动、侧向运动(左右运动)
与图1-12的原理相同,在图1-13中,改变电机2和电机4的转 速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正 向和反向),实现四旋翼无人机的滚转运动。同时,四旋翼无 人机首先发生一定程度的倾斜,从而使螺旋桨升力产生水平分 量,因此可以实现四旋翼无人机的侧向飞运动。例如,电机4的 转速上升,电机2的转速下降,电机1和电机3的转速保持不变, 无人机左滚,向左运动。
表1-1 电机与螺旋桨的搭配
1.2.1 结构组成
6. 飞行控制系统
飞行控制系统是多旋翼无人机的核心设备,飞控系统的好坏从本质上决定了无人机 的飞行性能。飞行控制系统集成了高精度的感应器元件,主要由陀螺仪(飞行姿态感 知)、加速计、角速度计、气压计、GPS及指南针模块(可选配)以及控制电路等部件 组成。通过高效的控制算法,能够精准地感应并计算出无人机的飞行姿态等数据,再通 过主控制单元实现精准定位悬停和自主平稳飞行。根据机型的不一样,可以有不同类型 的飞行控制系统,有支持固定翼、多旋翼及直升机的飞行控制系统。
(2)KV值
图1-6 电机
在无刷电机的铭牌上还有一组数字,如 KV950,如图 1-6 所示。用它来表示当电机的输入电压增加 1 伏特,无刷电机空转转 速增加的转速值,单位是“转速/伏特”(RPM/V)。例如KV950 电机,外加 1V 电压,电机空转时每分钟转 950 转;外加 2V 电压,电机的空转转速就 1900 转/分;电压为 10V 的时候,电机的空转转速达到 9500 转/分。单从 KV 值,不可以评价 电机的好坏,因为不同 KV 值适用不同尺寸的螺旋桨。KV 值小的电机的绕线匝数更多更密,能承受更大的电流,所以可以产 生更大的扭矩去驱动更大尺寸的螺旋浆;相反,KV 值大的电机的绕线匝数少,产生的扭矩小,适合驱动小尺寸的螺旋浆。
无人机基础教程ppt1.3旋翼无人机的结构和原理
13 旋翼无人机飞行原理
滚转运动:当飞行器向左倾斜时,拉力在水平方向上的分力使得飞行器得以向左平移。同 理可以实现飞行器的向右平移。
偏航运动:当飞行器需要改变航向的时候,通常是借助于反扭力实现的。通过改变对角的 电机转数来破坏反扭力的平衡,使得飞行器向着扭力强得一侧旋转。
无人机 WURENJI 谢谢观看~
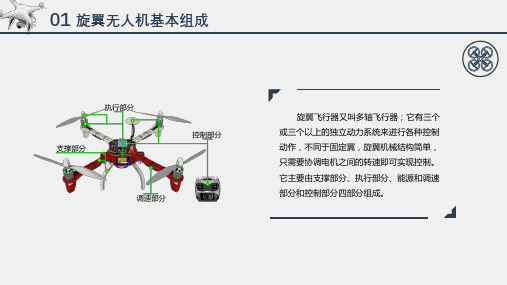
01 旋翼无人机基本组成
旋翼飞行器又叫多轴飞行器;它有三个 或三个以上的独立动力系统来进行各种控制 动作,不同于固定翼,旋翼机械结构简单, 只需要协调电机之间的转速即可实现控制。 它主要由支撑部分、执行部分、能源和调速 部分和控制部分四部分组成。
02 旋翼无人机基本组成
支撑部分
旋翼无人机支撑部分包括: 机架、起落架。
பைடு நூலகம்
09 旋翼无人机飞行原理
反扭:当螺旋桨受到电机驱动而旋转的时候,会对电机产生一个相反的扭力,使得电机朝 相反的方向旋转。这种现象叫做反扭现象。当机臂一端固定的驱动装置使螺旋桨产生旋转运动 的时候,机臂会以电机轴为中心发生与螺旋桨转动方向相反的相对转动。
10 旋翼无人机飞行原理
当一对机臂的两端固定两个 同向旋转的螺旋桨时,机臂会以自 为中点为旋转中心产生与螺旋桨旋 转方向相反的自转运动。
06 旋翼无人机基本组成
执行部分
旋翼无人机执行部分包括: 电池、电调。
电池:电池是无人机的供电 装置,给电机和机载电子设备供 电。
电调:电子调速器,将飞控 的控制信号,转变为电流信号, 用于控制电机转速。
07 旋翼无人机基本组成
控制部分
旋翼无人机执行部分包括: 遥控装置、GPS。
遥控装置:遥控设备用于对 无人机发送各种控制指令,是人 与飞行器之间的连接设备。
无人机结构与系统课件:动力系统概述
平面齿轮传动
齿轮齿条 内啮合
斜齿圆柱齿轮传动 外啮合
齿
齿轮齿条
轮 传
人字齿齿轮运动
动
直齿
传递相交运动 斜齿
曲线齿
空间齿轮传动
交错轴斜齿轮传动
传递交错轴运动 蜗杆涡轮
准双曲面齿轮
3.1.3 发动机的种类 1.按能量来源分类
动力系统概述
图 3-3 无人机发动机类型
2.按推进动力产生原理分类
1)直接反作用力发动机 是利用向后喷射高速气流而产生向前的反作用力 来推进无人机。直接反作用力发动机又叫喷气式 发动机,这类发动机包括涡轮喷气式发动机。
2)间接反作用力发动机 由发动机带动飞机的螺旋桨旋转对空气作功,使空 气加速向后(向下)流动时,空气对螺旋桨产生反作用 力来推进无人机。这类发动机有活塞式发动机、涡 轮螺旋桨发动机、涡轮轴发动机和涡轮螺旋桨风扇 发动机等。
3.1.3 发动机的种类
3.1.4 发动机的功能和要求
动力系统概述
发动机的基本功用是为无人机提供动力,以确保重于空气的无人机 能够稳定、可控、可持续地在空中飞行。评定发动机品质的主要指 标有性能参数、可靠性、耐久性等。其基本要求归结如下:
1-后盖,2-接线端子,3-电刷端盖,4-电刷,5-换向器, 6-杯形绕组(转子),7-转轴,8-垫圈,9-滑动轴承, 10-外壳,11-磁铁(定子),12-法兰,13-定位环
3.1.2 燃油类发动机动力系统组成
1.燃油发动机系统 2.燃油系统 3.滑油系统 4.传动系统
动力系统概述
内啮合
直齿圆柱齿轮传动 外啮合
1.功率重量比大
2.耗能小
3.体积小 4.工作安全可靠、寿命长
5.维修方便