《理论力学》第七章点的合成运动习题解
哈工大理论力学教研室《理论力学Ⅰ》(第7版)课后习题-点的合成运动(圣才出品)
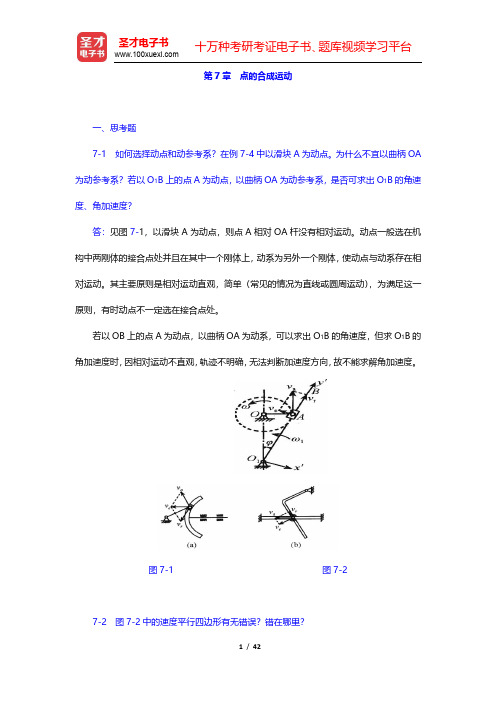
图 7-4 解:以 M 为动点,水轮为动系,牵连运动轨迹为定轴转动,速度分析如图 7-5 所示。
图 7-5 由 va = ve + vr 在 x、y 两个方向上的分量得
va sin 60o = ve + vr sin va cos 60o = vr cos
7 / 42
圣才电子书
图 7-1
图 7-2
7-2 图 7-2 中的速度平行四边形有无错误?错在哪里?
1 / 42
圣才电子书 十万种考研考证电子书、题库视频学习平台
答:都有错误,改正见图 7-3。
图 7-3 7-3 如下计算对不对?错在哪里?
图 7-4 (a)图 7-4(a)中取动点为滑块 A,动参考系为杆 OC,则 ve=ω·OA,va=cosφ (b)图 7-4(b)中 vBC=ve=vacos60°va=ωr 因为 ω=常量,所以,VBC=常量, (c)图 7-4(c)中为了求 aa 的大小,取加速度在 η 轴上的投影式:aacosφ-ac=0 所以 答:(a)不对,va 的速度平行四边形画法不正确,正确图见图 7-5。 (b)加速度的计算不正确。vBC 和 ω 为此瞬时的大小,不是任意时刻的速度和角速度 故不能对时间求导。
其中 ρ 和 φ 是用极坐标表示的点的运动方程,aρ 和 aψ 是点的加速度沿极径和其垂直 方向的投影。
答:如图 7-7 建立直角坐标系.xOy 与极坐标系 ρOφ。 取动点 Q,动系 OA
4 / 42
圣才电子书
加速度合成(图 7-8)
十万种考研考证电子书、题库视频学习平台
aa=aen+aet+ar+ac
大小:?
方向:Hale Waihona Puke √ √ √ √图 7-7
第七章点的合成运动习题解答

习 题7-1 如图7-26所示,光点M 沿y 轴作谐振动,其运动方程为:x = 0,)cos(θω+=t A y ,式中,A 、ω、θ均为常数。
如将点M 投影到感光记录纸上,此纸以等速v e 向左运动,试求点在记录纸上的轨迹。
图7-26t v x e =')cos()cos(eθωθω+'=+=='x v A t A y y7-2 用车刀切削工件的端面,车刀刀尖M 的运动方程为 t b x ωsin =,其中b 、ω为常数,工件以等角速度ω逆时针方向转动,如图7-27所示。
试求车刀在工件端面上切出的痕迹。
图7-27t b t y t x x ωωωsin sin cos ='-'= 0cos sin ='+'=t y t x y ωω 解得)2sin(2cos sin sin tan cos sin t b t t b t t t t b x ωωωωωωω==+=' ]1)2[cos(2sin tan 2-=-='-='t bt b t x y ωωω4)2()(222b b y x =+'+'7-3 河的两岸相互平行,如图7-28所示。
设各处河水流速均匀且不随时间改变。
一船由点A 朝与岸垂直的方向等速驶出,经过10 min 到达对岸,这时船到达点B 的下游120 m 处的点C 。
为使船A 能垂直到达对岸的点B ,船应逆流并保持与直线AB 成某一角度的方向航行。
在此情况下,船经12.5 min 到达对岸。
试求河宽L 、船相对于水的相对速度v r 和水的流速v 的大小。
图7-28m/s 2.0600120==v 600r L v =船A 能垂直到达对岸的点B750a L v = 2a22r v v v += 2222.0)750()600(+=L L m 200)7501()6001(2.022=-=L m/s 31r =v7-4 半径R = 60mm 的半圆管BC 绕定轴OO 1按规律)5(t t -=ϕ转动,点在管内运动,相对于管子的运动方程为2π10t BM =(弧长的单位为mm),如图7-29所示。
07-理论力学-第二部分运动学第七章点的合成运动

运动学/点的合成运动
动 点: AB杆上的A点 动 系: 凸轮 定 系: 地面 绝对运动: 直线 相对运动:曲线(圆弧) 牵连运动: 直线平移
1616
运动学/点的合成运动
动 点:A(在AB杆上) 动 系:偏心轮C 定 系: 地面 绝对运动:直线 相对运动:圆周(C) 牵连运动: 定轴转动
22
运动学/点的合成运动
另一方面,在实际问题中,不仅要在固联在地面上 的参考系上还要在相对于地面运动着的参考系上观察和 研究物体的运动。下面先看几个例子。
33
运动学/点的合成运动
44
55
本章将用点的合成运动的方法来研究这类问题。 66
第七章 点的合成运动
§7-1 §7-2 §7-3
§7-4
r 2
r 2
r2
l2
r2
l 2(
) 3030
运动学/点的合成运动
例4 圆盘凸轮机构
已知:OC=e ,R 3e ,(匀角速度),图示瞬时, OCCA,且O,A,B三点共线。求:从动杆AB的速度。
解:选取动点:AB 上的A点
动系:圆盘
绝对运动:直线 相对运动:圆周
由
定系:基座 va
牵连运动:定轴 ve vr
▼动点相对动系、定系必须 有运动,不能和动系在同一 物体上。
▼以上可归结为一点、两系 、三运动。
2020
运动学/点的合成运动
四、 运动方程及坐标变换 可以利用坐标变换来建立绝对、
相对和牵连运动之间的关系。
以二维问题为例。设定系 ,
动系
。动点M,如图所示。
(1)绝对运动方程: x x(t), y y(t)
大小 ? OA
最新理论力学第七章点的合成运动(哈工大第七版版)

车刀刀尖的运动
相对某一参考体的运动可由相对于其他参考体的几个运 动的组合而成-合成运动。
§7-1 相对运动·牵连运动·绝对运动 定坐标系(定系)
两个坐标系 动坐标系(动系) 绝对运动:动点相对于定系的运动。
三种运动 相对运动:动点相对于动系的运动。 牵连运动:动系相对于定系的运动。
v r v a 2 v e 2 2 v a v e c6 o 0 3 . s 6 m s
arcvsesiin 6n (0 )46 12
vr
例7-6 已知:圆盘半径为R,以角速度ω1绕水平轴CD转动, 支承CD的框架又以角速度ω2绕铅直的AB轴转动,如图所示。 圆盘垂直于CD,圆心在CD与AB的交点O处。
OA=r,两轴间距离OO1=l。求:曲柄在水平位置时摇杆的
角速度w1。
解: 1.动点:滑块 A 动系:摇杆 O1B
OA l2r2
2.运动分析:
绝对运动-绕 O 点的圆周运动;
相对运动-沿O1B的直线运动;
牵连运动-绕 O1 轴定轴转动。
3.
vavevr
大小 rw ? ?
方向 √ √ √
vevasijnrw
2.绝对运动:直线运动(AB)
相对运动:圆周运动(半径R)
牵连运动:定轴运动(轴O)
3.
va ve vr
大小 ? wOA ?
方向 √ √
√
vaveco twOO A e A we
例7-5 已知:矿砂从传送带A落入到另一传送带B上,如图所示。
站在地面上观察矿砂下落的速度为 v1=4m/s ,方向与铅直线成30º 角。传送带B水平传动速度 v2=3m/s 。 求:矿砂相对于传送带B 的速度。
点的运动合成习题参考解答

解:用点的复合运动求解,取重物 B 为动点,动系与水平悬臂固连,则牵连运
动为定轴转动,相对运动为直线运动。
由于
vr
=
dx dt
=
−0.5 m/s
( ←)
方向与轴 x 的正向相反。
当 t = 10 s 时, ve = x ⋅ω = 15 × 0.1 = 1.5 m/s , 方向指向轴 z 的正向。速度图见上
2. 图示曲柄滑道机构中,曲柄长 AB = r,绕轴 O 以ω作匀速转动,滑槽 DΕ与水 平线成60°角。求当ϕ =0、30°、60°时,杆 BC 的速度。
解:本题机构 BC 作平动,可以用点的运动学方法求解。这里应用点的合成运动 求解,以滑块 A 为动点,动系与构件 BC 固结,考虑一般位置速度图如下图所示。
可得
aa = ae + ar
aBC = ae = va sinθ = OA⋅ω 2 sinθ = 0.4 × 0.25sin 30o = 0.05 m/s2 (↓)
6. 小车的运动规律为 x = 50 t2,x 以 cm 计,t 以 s 计。车上摆杆 OM 在铅垂面内
绕轴 O 转动,其转动规律为ϕ = π sin πt 。如 OM = 60 cm。求 t = 1 s 时摆杆端
由 va = ve + vr 和速度三角形,以及正弦定理有
ve sin(30o
−ϕ)
=
va sin60o
⇒
v BC
= ve
=
va sin60 o
sin(30o
−ϕ)
将 va = rω 及ϕ =0、30°、60° 分别代入上式解得当ϕ =0、30°、60° 时,
vBC =
3 rω, 3
理论力学(7.4)--点的合成运动作业解答
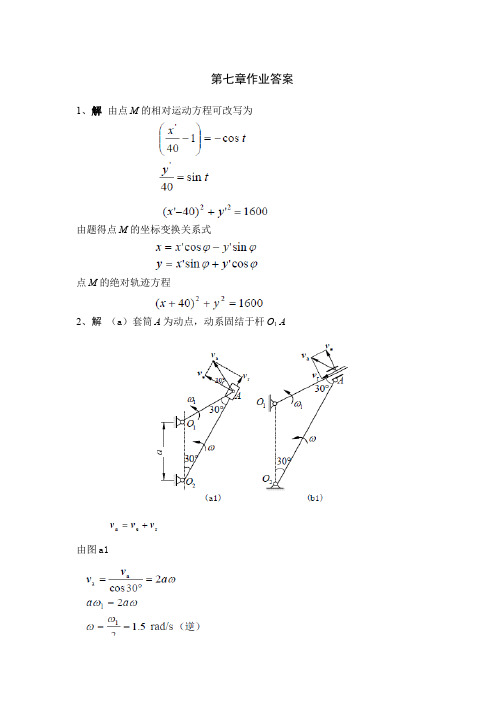
第七章作业答案1、解 由点M 的相对运动方程可改写为
由题得点M 的坐标变换关系式
点M 的绝对轨迹方程
2、解 (a)套筒A 为动点,动系固结于杆O1 A
由图a1
(b)套筒A 为动点,动系固结于杆O2 A,速度分析如图b1 所示。
3、解 ① 活动销子M 为动点,动系固结于轮O
② 活动销子M 为动点,动系固结于杆OA
速度分析如图b 所示
4、解 速度分析,如图b所示
加速度分析,如图c所示
5、解 点A 为动点,动系固结于小车,加速度分析如图b 所示。
由题意得t = 1 s时,各量为
分别向轴x , y 方向投影得
6、解 小环M 为动点,动系固结于曲杆OBC,速度分析如图b 所示。
加速度分析如图c 所示。
理论力学第七版第07章(1-2节)--点的合成运动 (2)

绝对运动:圆周运动 相对运动:直线运动(沿O1B) 牵连运动:定轴转动(绕O1轴) 2.速度
va ve vr r
√
大小
? ?
√
rl v r v a cos 2 l r2
方向 √
r 2 v e v a sin 2 l r2
ve ve r 2 1 2 2 2 O1 A l r2 l r
(7-15)
aa ar α r ω ω r 2ω vr
(7-18)
§7-4 牵连运动是定轴转动时点的加速度合成定理
设动系作定轴转动,转轴通过点O´,其角速度矢量为
aa ar α r ω ω r 2ω vr
v a rO xi yj z k xi yj zk
va ve v r
aa ae ar
例7-7
已知:如图所示平面机构中,铰接在曲柄端 A 的滑块,可 在丁字形杆的铅直槽DE内滑动。设曲柄以角速度ω作匀速 转动, OA r 。
回顾: 2.矢积表示绕定轴转动刚体上点的速度和加速度
dv d 加速度 a r dt dt
→
d dr r dt dt
r v
(6-21)
→
→ → →
科里奥利,法国物理学家。
1792年5月21日生于巴黎;1843年9月19日卒于巴黎。 科里奥利是巴黎工艺学院的教师,长期健康状况不佳,这 限制了他创造能力的发挥。即便如此,他的名字在物理学 中仍是不可磨灭的。 1835年,他着手从数学上和实验上研 究自旋表面上的运动问题。地球每 24 小时自转一周。赤道 面上的一点,在此时间内必须运行25,000英里,因此每小 时大约向东运行 1,000英里。在纽约纬度地面上的一点, 一天只需行进19,000英里,向东运行的速度仅约为每小时 800英里。由赤道向北流动的空气,保持其较快的速度,因 此相对于它下面运动较慢的地面而言会向东行。水流的情 况也是一样。因此,空气和水在背向赤道流动时好像被推 向东运动,反之会向西运动,这样会形成一个圆! 推动它们运动的力就称为科里奥利力。 这种力不是真实存在的 ! 只是 “ 惯性 ” 这种性质的表现而已。 正是这种"力"造成了飓风和龙卷风的旋转运动。研究大炮射 击、卫星发射等技术问题时,必须考虑到这种力。
理论力学《点的合成运动》答案

4
动系:固连于CBDE上的坐标系。 动系平动, v A = v CBDE = v BC 静系:固连于地面的坐标系。 绝对速度:A相对于地面的速度。 相对速度:A相对于DE的速度。 牵连速度:CBDE相对于地面的速度。
→ → →
vr
900 − ϕ A
120 0
va
ϕ
ve = vBC
ϕ O
5
相对速度:C相对于OC杆的速度。 牵连速度:OC杆相对于地面的速度。
ve = OC ⋅ ω =
→ → →
0.4 × 0.5 = 0.231( m / s ) cos 30 0
va = ve + vr va = ve 0.2 = = 0.267( m / s ) 0 cos 30 cos 2 30 0
BC作平动,故
v BC = v a = 1.155lω 0
[习题7-9] 一外形为半圆弧的凸轮A,半径r=300mm,沿水平方向向右作匀加速运动, 其加速度aA=800mm/s 。凸轮推动直杆BC沿铅直导槽上下运动。设在图所示瞬时, vA=600mm/s,求杆BC的速度及加速度。 解: 动点:B。 动系:固连于凸轮A上的坐标系。 静系:固连于地面的坐标系。 绝对速度:B相对于地面的速度。 相对速度:B相对于凸轮的速度。 牵连速度:B相对于凸轮的速度。
θ = 40.930
→ →
即 v 与 v1 之间的夹角为 θ = 40.93 。 种子走过的水平距离为:
0
s = v x t = v cos θ ⋅ t h = vyt +
1 2 gt 2 1 2 gt 2
h = v sin θt +
0.25 = 2.65 sin 40.930 t + 0.5 × 9.8t 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2v v e =1v v =ABr v v =04545v r =NBC.第七章 点的合成运动习题解[习题7-1] 汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。
求在B 车上观察到的A车的速度。
解: 动点:A 车。
动系:固连于B 车的坐标系。
静系:固连地面的坐标系。
绝对运动:动点A 相对于地面的运动。
相对运动:动点A 相对于B 车的运动。
牵连运动:在动系中,动点与动系的重合点,即牵连点相对于静系(地面)的运动。
当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。
2v v e =。
由速度合成定理得:→→→+=r e v v v 。
用作图法求得:h km v v AB r /40== (↑)故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。
[习题7-2] 由西向东流的河,宽1000m ,流速为0.5m/s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。
问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。
动系:固连在流水上。
静系:固连在岸上。
绝对运动:岸上的人看到的船的运动。
相对运动:船上的有看到的船的运动。
牵连运动:与船相重合的水体的运动。
绝对速度:未知待求,如图所示的v 。
相对速度:s m v r /1=,方向如图所示。
牵连速度:s m v e /5.0=,方向如图所示。
由速度合成定理得:→→→+=re v v vv r1=NBsm /2sm v e /1=v)/(118.115.02222s m v v v r e =+=+=435.635.01arctanarctan===er v v θ)(50021000tan 1000m AC ===θ,即,船将在北岸下流500m 处靠岸。
如图所示,A为出发点,B为靠岸点。
渡河所花的时间:秒分4016)(1000/110001===s sm m t(2) 03015.0arcsinarcsin===re v v α)/(866.05.012222s m v v v e r =+=-=即船头对准方向为北偏西030 渡河所花的时间:秒分1519)(1155/866.010002===s sm m t[习题7-3] 播种机以匀速率s m v /11=直线前进。
种子脱离输种管时具有相对于输种管的速度s m v /22=。
求此时种子相对于地面的速度,及落至地面上的位置与离开输种管时的位置之间水平距离。
解: 动点:种子。
动系:固连于输种管的坐标系。
静系:固连于地面的坐标系。
绝对速度:种子相对于地面的速度,未知待求。
相对速度:s m v v r /22== 牵连速度:s m v v e /11==→→→+=r e v v v)/(65.2120cos 21221022s m v =⨯⨯-+=120sin 65.2)60sin(1=-θ07.1965.2120sin arcsin60==-θ93.40=θ即→v 与→1v 之间的夹角为093.40=θ。
种子走过的水平距离为:t v t v s x ⋅==θcos221gt t v h y += 221sin gt t v h +=θ28.95.093.40sin 65.225.0t t ⨯+= 025.0736.19.42=-+t t ⎩⎨⎧-=±-=⨯-⨯⨯-±-=不合舍去))((464.0)(11.08.9813.2736.19.42)25.0(9.44736.1736.12s s t )(22.011.093.40cos 65.20m s =⨯⨯=[习题7-4] 砂石料从传送带A落到另一传送带B的绝对速度为s m v /41=,其方向与铅直线成30角。
设传送带B与水平面成015角,其速度为s m v /22=,求此时砂石料对于传送带B的相对速度。
又当传送带B的速度多大时,砂石料的相对速度才能与B 带垂直。
解:动点:砂石料。
动系:固连于传送带B的坐标系。
静系:固连于地面的坐标系。
绝对速度:砂石料相对于地面的速度,s m v v /41==。
相对速度:砂石料相对于传送带B的速度,待求。
牵连速度:传送带B相对于地面的速度:s m v v e /22==→→→+=r e a v v v)/(98.375cos 42242022s m v r =⨯⨯-+=e Aa v v =vev 当B r v v ⊥时,传送带B的速度为:)/(04.115sin 415sin 0s m v v a B ===[习题7-5] 三角形凸轮沿水平方向运动,其斜边与水平线成α角。
杆AB的A端搁置在斜面上,另一端B在气缸内滑动,如某瞬时凸轮以速度v 向右运动,求活塞B的速度。
解: 动点:A。
动系:固连于凸轮上的坐标系。
静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,待求。
相对速度:A相对于凸轮的速度。
牵连速度:凸轮相对于地面的速度。
→→→+=r e a v v vαtan v v A =因为杆AB作上下平动,故活塞B的速度为: αtan v v v A B ==[习题7-6] 图示一曲柄滑道机构,长r OA =的曲柄,以匀角速度ω绕O轴转动。
装在水平杆CB上的滑槽DE与水平线成060角。
求当曲柄与水平线的夹角ϕ分别为00、030、060时,杆BC的速度。
解: 动点:A。
a90BCOaevC动系:固连于CBDE上的坐标系。
动系平动,BCCBDEAvvv==静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度。
相对速度:A相对于DE的速度。
牵连速度:CBDE相对于地面的速度。
→→→+=reavvvωrva=0120sin)90120180sin(aBCvv=+--ϕ0120sin)30sin(ϕϕrvBC=-ωϕrvBC⋅-=120sin)30sin(ωωωϕrrrvBC332321120sin)30sin(|-=-=⋅-==负号表示此时速度方向与图示方向相反,即向左。
120sin)3030sin(|300=-==ϕBCv,此时往复运动改变方向。
ωωωϕrrrvBC332321120sin)3060sin(|600==⋅-==,向右。
[习题7-7] 摇杆OC带动齿条AB上下移动,齿条又带动直径为100mm的齿轮绕O1轴摆动。
在图所示瞬时,OC之角速度ω0=0.5rad/s,求这时齿轮的角速度。
解:动点:C。
动系:固连于OC杆上的坐标系。
静系:固连于地面的坐标系。
av ev rv A3090绝对速度:C相对于地面的速度。
相对速度:C相对于OC杆的速度。
牵连速度:OC杆相对于地面的速度。
)/(231.05.030cos 4.00s m OC v e =⨯=⋅=ω→→→+=r e a v v v )/(267.030cos2.030cos 02s m v v e a ===75.0/2.01===ωr v v AB a)/(33.505.075.0/2.0/267.011s rad r ===ω即齿轮的角速度为s rad /33.51=ω[习题7-8] 摇杆滑道机构的曲柄OA长l ,以匀角速度ω0绕O轴转动。
已知在图所示位置 OA⊥OO1,l AB 2=,求该瞬时BC杆的速度。
解: 动点:A。
动系:固连于D O 1杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,0ωl v a =。
相对速度:A相对于D O 1杆的速度。
牵连速度:D O 1杆相对于地面的速度。
→→→+=re a v v v002130sin ωl v v a e == 01211ωωl A O v D O e =⋅=02121ωωl l D O =⋅0411ωω=D O动点:B。
avrv Beav rvaa n 动系:固连于D O 1杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:B相对于地面的速度。
相对速度:B相对于D O 1杆的速度。
牵连速度:D O 1杆相对于地面的速度。
→→→+=r e a v v v0014141ωωωl l B O v D O e =⨯=⋅=000155.1866.030cos ωωl l v v e a ===BC 作平动,故0155.1ωl v v a BC ==[习题7-9] 一外形为半圆弧的凸轮A,半径r=300mm,沿水平方向向右作匀加速运动,其加速度aA=800mm/s2。
凸轮推动直杆BC沿铅直导槽上下运动。
设在图所示瞬时,vA=600mm/s,求杆BC的速度及加速度。
解:动点:B。
动系:固连于凸轮A上的坐标系。
静系:固连于地面的坐标系。
绝对速度:B相对于地面的速度。
相对速度:B相对于凸轮的速度。
牵连速度:B相对于凸轮的速度。
→→→+=r e a v v v凸轮在水平面上作平动,BC在铅垂方向上作平动。
A e v v =)/(23.1039360030cot 30cot 0s mm v v v v v A e a B BC ======)/(12006002230sin 0s mm v v v e e r =⨯===→→→→→→++=+=τr n re r e a a a a a a aeCv rv ra aa ea 上式在x 轴上的投影为:nr e a a a a -=030cos 60cosrv a aa a r e n re a 22323⋅-=-=)/(4.8214300)1200(2800732.122s mm a a -=⨯-⨯=,负号表示方向向下。
[习题7-10] 铰接四边形机构中的O1A=O2B=100mm,O1O2=AB,杆O1A以等角速度ω=2rad/s绕O1轴转动。
AB杆上有一套筒C,此筒与CD杆相铰接,机构各部件都在同一铅直面内。
求当φ=60°时CD杆的速度和加速度。
解:动点:C。
动系:固连于AB杆上的坐标系。
静系:固连于地面的坐标系。
绝对速度:C相对于地面的速度。
相对速度:C相对于AB杆的速度。
牵连速度:AB杆相对于地面的速度。
→→→+=r e a v v v)/(20021001s mm A O v v v A C e =⨯=⋅===ω )/(1005.020060cos 0s mm v v e a =⨯==)/(100s mm v v v a C CD ===→→→+=r e a a a aA e a a = 0=τe a)/(4002100222112s mm A O AO vaa n ee =⨯=⋅===ω)/(4.346866.040060sin 2s mm a a e a =⨯==)/(4.346s mm a a a a C CD ===[习题7-11] 具有圆弧形滑道的曲柄滑道机构,用来使滑道CD获得间歇往复运动。