交流电动机矢量控制变压变频调速系统_七_第七讲异步电动机矢量控制系统
异步电机矢量控制变频调速系统的研究

异步电机矢量控制变频调速系统的研究一、引言随着电气技术的不断发展,以异步电机为主的传统传动方式逐渐被新一代电机控制技术所取代。
其中,异步电机矢量控制变频调速系统凭借其高效、高精度、高稳定性的特点,成为工业自动化领域的研究热点。
本文旨在分析现状、面临的问题及未来发展方向。
二、异步电机矢量控制的基本原理异步电机矢量控制是以数字信号处理器(DSP)为核心的控制系统,其基本原理是通过对电机的电流和磁场进行测量与分析,实现电机转速和力矩的精确控制。
具体来说,异步电机矢量控制系统由电机主控制器、电机侧的转子磁链观测器、电机侧的电流环等组成。
其中,电机主控制器通过测量电机的转速、转子磁链等信息,经过数学模型的运算,输出相应的电压和电流信号,控制电机的状态和运动。
三、现状1. 控制算法的改进当前的异步电机矢量控制系统的研究主要集中在控制算法的改进上。
例如,研究者通过改进电机转矩算法、调整PI控制器参数等手段,提高电机的控制精度和响应速度。
同时,也有研究集中在控制器的设计和优化上,以获得更高的稳定性和鲁棒性。
2. 传感器技术的发展传感器技术的发展为异步电机矢量控制系统的研究提供了更多的可能性。
例如,采用高精度的速度传感器可以提供更准确的电机转速信息,进一步提高控制精度。
此外,还有研究者探索了无传感器的控制方法,通过非接触式传感技术实现对电机状态的监测和控制。
3. 系统性能的优化随着对异步电机矢量控制系统的深入研究,研究者们开始关注系统性能的优化。
他们通过提高控制器的采样频率、降低控制系统的延迟等手段,减小系统的震荡和波动,提高控制系统的稳定性和鲁棒性。
同时,也有研究者通过引入自适应控制技术等新方法,进一步提高系统的响应速度和鲁棒性。
四、异步电机矢量控制变频调速系统面临的问题1. 控制算法的复杂性异步电机矢量控制系统的复杂性限制了其在一些特定领域的应用。
控制算法的复杂性不仅增加了系统的开发难度,还会导致系统的运算量增大,从而影响控制系统的实时性和稳定性。
交流电动机矢量控制变压变频调速系统(一)
交流电动机矢量控制变压变频调速系统(一)异步电动机、矢量控制、直接转矩控制、交流调速系统、电磁转矩1.1 直流电动机和异步电动机的电磁转矩任何调速系统的任务都是控制和调节电动机的转速,然而,转速是通过转矩来改变的,因此,首先从统一的电动机转矩方程式着手,揭示电动机控制的实质和关键。
下面通过分析和对比直流电动机和异步电动机的电磁转矩,弄清两种不同电动机电磁转矩的异同和内在联系,这样,对于如何在交流电动机上模拟直流电动机的转矩控制规律就很容易理解了。
作为一种动力设备的任何电动机,其主要特性是它的转矩—转速特性,在加(减)速和速度调节过程中都服从于基本运动学方程式:(1)式中: Te—电动机的电磁转矩;TL—负载转矩;—转动惯量;n—电动机的转速。
由式(1)可以知道,对于恒转矩负载在起、制动及调速时,如果能控制电动机的电磁转矩恒定,则就能获得恒定的加(减)速运动。
当突加负载时,如果能把电动机的电磁转矩迅速地提高到允许的最大值(Temax),则就能获得最小的动态速降和最短的动态恢复时间。
可见,任何电动机的动态特性如何,取决于对电动机的电磁转矩控制效果如何。
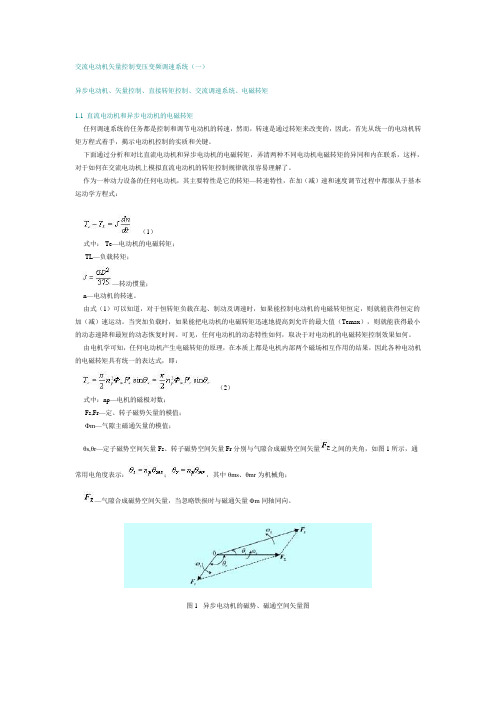
由电机学可知,任何电动机产生电磁转矩的原理,在本质上都是电机内部两个磁场相互作用的结果,因此各种电动机的电磁转矩具有统一的表达式,即:(2)式中:np—电机的磁极对数;Fs,Fr—定、转子磁势矢量的模值;Φm—气隙主磁通矢量的模值;θs,θr—定子磁势空间矢量Fs、转子磁势空间矢量Fr分别与气隙合成磁势空间矢量之间的夹角,如图1所示,通常用电角度表示:;,其中θms、θmr为机械角;—气隙合成磁势空间矢量,当忽略铁损时与磁通矢量Φm同轴同向。
图1 异步电动机的磁势、磁通空间矢量图在直流电机中,主极磁场在空间固定不动;由于换向器作用,电枢磁势的轴线在空间也是固定的,通常把主极的轴线称为直轴,即d轴(direct axis),与其垂直的轴称为交轴,即q轴(quadrate axis)。
异步电机矢量控制原理
异步电机矢量控制原理一、引言异步电机是一种广泛应用的电动机,其控制方式主要有直接转矩控制和矢量控制两种。
其中,矢量控制是一种更加精确、灵活的控制方式,可以实现高效率、高性能的运行。
本文将详细介绍异步电机矢量控制原理。
二、异步电机基础知识1. 异步电机结构和工作原理异步电机由定子和转子两部分组成,定子上有三个相位交流绕组,转子上则有导体条。
当三相电源施加在定子上时,会产生旋转磁场,进而感应出转子中的感应电动势,并使得导体条在旋转磁场中感受到一个旋转力矩,从而带动转子运动。
2. 异步电机参数异步电机的参数包括定子电阻、定子漏抗、定子互感、转子漏抗等等。
这些参数对于确定异步电机的特性非常重要。
3. 感应电动势和反电动势当三相交流电源施加在定子上时,会产生一个旋转磁场,并且这个旋转磁场的频率与供电频率相同。
这个旋转磁场会感应出转子中的感应电动势,从而产生一个旋转力矩。
同时,由于异步电机的运动,转子中也会产生一个反电动势,其大小与运动速度成正比。
三、矢量控制基础知识1. 矢量控制简介矢量控制是一种通过模拟直流电机的方式来控制交流电机的方法。
它可以实现非常精确的控制,并且可以根据需要调整转速和转矩。
2. 矢量控制原理在矢量控制中,将交流电机看作一个带有两个分量(即直流分量和交流分量)的向量。
通过对这两个分量进行分别控制,就可以实现对交流电机的精确控制。
四、异步电机矢量控制原理1. 矢量控制与异步电机结合在异步电机中使用矢量控制时,需要将交流电源输入到变频器中,并将其输出到异步电机上。
变频器会将交流信号转换为直流信号,并将其分解为两个分量:一个用于产生旋转磁场(即定子磁通),另一个用于产生反向转矩(即转子电流)。
2. 矢量控制中的定子电流和磁通在矢量控制中,定子电流和磁通是非常重要的参数。
定子电流决定了旋转磁场的大小,而磁通则决定了旋转磁场的方向。
因此,在进行异步电机矢量控制时,需要对定子电流和磁通进行精确控制。
异步电动机的矢量控制变频调速系统

0 引言 随着交流传动系统的飞速发展, 交流调速系统正以良好的
动态、静态性能广泛应用于工业生产的各个领域, 打破了过去 传动领域内直流调速系统所占的统治地位, 21 世纪将是交流 调速的时代。
上世纪 70 年代初, 矢量控制技术提出以后, 交流电机控制 系统的性能不断得到改善。目前, PWM 供电的交流电机调速 系统在中小功率电气传动领域中得到广泛的应用。
np = 2, R 1= 4128 , R 2= 11038 , L S = 01080 5H , L r= 01083 77H , L m = 01077 7H , J = 01004 7Nm s2, f = 60H z, 电机空载起动。 结果见图 3、 图 4。 4 结论
由仿真结果可以看出, 这个矢量控制的闭环调速系统有良 好的动、 静态性能。 由此证明了这个系统的有效性。
对称的三相定子电流 iA 1、iB 1、iC1在电机气隙空间中建立起 一个以电源角频率 Ξ1 速度旋转的磁势矢量。由于磁势F→1 在数 值上与定子电流有效值 i1 成正比, 因此为了叙述方便常用电 流 i1 来替代, 此时 i1 应看作与F→1 等效的空间矢量。5 则是将被 选用为旋转坐标轴线的电机某旋转磁通矢量, 应当引入与 i1 同步旋转的同步速M T 坐标系, 使电流矢量沿坐标系的M T 轴分解成等效的激磁电流 iM 1及转矩电流 iT 1。在同步速坐标系 中它们具有直流的特性, 这样就可以通过对等效激磁电流 iM 1 和转矩电流 iT 1的分别控制实现对电机转矩的瞬时控制。 2 转速、 磁链闭环控制的电流滞环型 PWM 变频调速系统
(上接第 43 页)
S 变化时, 压边装置可对不同厚度的坯料施以压边力; 当 H 变 化时, 弹簧高度发生变化, 压边装置产生的恒压边力也发生变 化, 变化范围在零至最大设计压边力之间。 3 结束语
第七讲异步电动机的矢量控制系统-吴学智

转子磁链定向矢量控制
i*sM i*sT
控制
i*sα MT
b
i*sβ
b
abc
i*a i*b i*c
变频器 ia
电流控制 ib 型变频器 ic
电机
a bc isα
b isβ
b isM
M T isT
电机 M-T轴 模型
cos φ sin φ
M2 2 LmiM1 LriM2 T2 LmiT1 LriT2 0
✓如果异步电机按转子磁场定向,即将MT同步旋转 坐标系中的M轴定在转子磁链方向,则定子电流is 可以沿M轴和T轴分解为励磁电流iM和转矩电流iT, iM产生转子磁链,iT产生电磁转矩。
转子磁链定向矢量控制
➢异步电机在转子磁链方向上的数学模型
✓当矢量控制所用单位矢量和磁链是直接检测到的 或由检测到的电机的端子量及转速计算得到时, 被称为直接矢量控制,也可称为磁通反馈矢量控 制(Feedback Vector Control)。
✓ 当矢量控制所用单位矢量和磁链是从电流指令值 和转速来计算得到时,被称为间接矢量控制,也 可称为磁通前馈矢量控制(Feedworward Vector Control),又称为转差频率矢量控制。
✓ 该控制器需要两个反变换,以 便控制电流i*sM和i*sT分别与 电机电流isM、isT相一致。
✓ 转子磁场定向是由坐标变换所 用单位矢量cosφ和sinφ来保证 的,正确的单位矢量是保证矢 量控制原理实现的关键。
cos φ sin φ
转子磁链定向矢量控制
➢从单位矢量获取方式上,矢量控制可以分为直接矢量 控制和间接矢量控制两大类。
cos φ sin φ
矢量控制调速系统
异步电动机矢量控制调速系统一.矢量控制调速系统的基本思路从电动机运动方程来看,唯一能影响转速的就是转矩,所以要想获得良好的调速性能,必须能够很好的控制电动机的转矩。
这样看来,电机调速的关键在于控制转矩。
前面我们系统的分析了直流调速系统,直流调速系统之所以具有优良的调速性能,是因为定子励磁电流和电枢电枢电流这两个参数可以分别由电动机的励磁回路和电枢回路独立产生,且空间正交,是两个可以独立控制的变量。
忽略磁路的饱和等非线性因素,只要控制定子励磁电流,使磁通恒定,则电磁转矩就正比于电枢电流,当负载转矩变化时,只要调节电枢电流就可以获得满意的动态性能。
对于异步电动机而言,情况就变得很复杂了。
异步电动机电磁转矩与多个系统变量有关,而且他们之间相互联系,耦合紧密,所以电磁转矩很难精确控制。
这与电动机本身的结构有关,电机中绕组相互耦合交叉,彼此之间的联系很强,定转子之间又有相对运动,导致电机成为一个高阶的时变的非线性系统。
经过对比可以发现,直流电动机的优良调速性能可归结为物理量之间解耦比较彻底,可以分别单独控制。
而反观异步电动机,电机中物理量耦合程度强,相互联系,控制起来就很复杂。
模仿直流电动机的调速方法,异步电动机的数学模型在同步旋转坐标系下,如果将M轴始终放在转子磁场的轴线上,那么可以发现电磁转矩只与定子电流的T轴分量和转子磁场的乘积有关。
此时我们再设想一下,若将转子磁场看成是直流电动机中的励磁磁通,那么异步电动机的转矩表达式与直流的在形式上完全一样了。
因为直流电动机中励磁磁通是由励磁电流单独控制的,可以保持恒定,我们只要调节电枢电流就可以调节转矩了。
根据这个原理,进一步设想,如果能够保持转子磁场不变,那么就可以改变定子电流T轴分量以改变转矩了。
到此为止,我们只需要找出保持转子磁场不变的方法,那么异步机的调速问题就解决了。
经过推导发现,转子磁场只与定子电流的M 轴分量有关。
综合以上最后得出结论:在转子磁场定向的条件下,即将M轴始终放在转子磁场轴线上,保持定子电流的M轴分量不变,改变定子电流的T轴分量就能够达到调节异步电动机转矩的目的了。
异步电机矢量控制变频调速系统的研究与设计
异步电机矢量控制变频调速系统的研究与设计一、本文概述随着现代工业技术的快速发展,电机作为工业领域中广泛应用的驱动设备,其性能优化和效率提升成为了重要的研究课题。
异步电机作为一种常见的电机类型,在各类工业设备中发挥着重要作用。
传统的异步电机控制方式往往存在着调速范围有限、动态响应慢、能源利用效率不高等问题。
研究与设计异步电机矢量控制变频调速系统具有重要的理论价值和实际应用意义。
本文旨在深入研究异步电机矢量控制变频调速系统的基本原理、控制策略及其优化设计方法。
将对异步电机的工作原理进行简要介绍,为后续研究奠定基础。
将详细阐述矢量控制的基本原理和实现方法,包括空间矢量脉宽调制(SVPWM)技术和转子磁场定向控制(FOC)策略等。
在此基础上,本文将重点探讨变频调速系统的设计与实现,包括变频器的选择、控制算法的优化以及系统性能的仿真与实验验证等方面。
通过本文的研究,旨在提高异步电机调速系统的性能,实现更宽范围的调速、更快的动态响应以及更高的能源利用效率。
同时,本文还将为相关领域的科研人员和工程师提供有益的参考和借鉴,推动异步电机控制技术的进一步发展。
二、异步电机矢量控制理论异步电机矢量控制理论是现代电机控制技术的核心之一,它的主要目标是通过控制电机的磁通和转矩,实现电机的高效、稳定和精确控制。
矢量控制,又称为场向量控制,其基本思想是将异步电机的定子电流分解为相互垂直的磁场分量和转矩分量,从而实现对电机磁通和转矩的独立控制。
在异步电机矢量控制理论中,最为关键的是坐标变换。
通过坐标变换,可以将电机的三相电流和电压转换为两相正交坐标系(如dq 坐标系)下的直流分量,从而简化电机的数学模型和控制算法。
最为常用的是Clarke变换和Park变换。
Clarke变换将三相电流转换为两相正交坐标系下的电流,而Park变换则进一步将两相正交坐标系下的电流转换为同步旋转坐标系下的直流电流。
在矢量控制系统中,通常采用矢量控制器来实现对电机磁通和转矩的控制。
异步电动机的矢量控制系统.概要
Lm p
s Lm
Rr Lr p
sl Lr
s Lm isM Lm p isT sl Lr irM Rr Lr p irT (7 5)
式中:usM、usT—定子M轴和T轴的电压; isM、isT—定子M轴和T轴的电流; irM、irT—转子M轴和T轴的电流。
Te CMIa If Ia
(7 1)
Ia
If
Ia是控制电机转矩的分量,If是控制 电机磁场的分量,这两者是解耦的。 如果If恒定,只要调节Ia就可控制转 矩。
6
二、交流异步电动机电磁转矩产生的原理
异步电动机的电磁转矩是由气隙旋转磁场Φ m与转子电流 Ir相互作用产生的。而Φ m又是定子电流Is与转子电流Ir共同 产生的。
4
现代控制理论在交流调速系统中的应用促进了矢量控制的 发展。 对速度信号观测的研究,促进了无速度传感器矢量控制 的发展; 电机参数在线辨识也是矢量控制的一个研究热点。
5
7-2 异步电动机矢量控制的基本思想 一、直流电动机电磁转矩产生的原理
直流电动机的电磁转矩是由电枢绕组电流Ia与气隙磁链Ψ f 相互作用产生的。由于直流电机在结构上就保证了电枢电流 矢量垂直于气隙磁链矢量,因此直流电机的电磁转矩为:
四、矢量控制的基本思想☆
矢量控制的基本思想是把异步电动机的转矩控制模拟 成直流电动机的转矩控制,即在MT同步坐标系中将异步电 机按转子磁场定向,实现励磁电流iM和转矩电流iT的独立控 制,使非线性耦合解耦。
10
Hale Waihona Puke 7-3 异步电动机矢量控制的实现
根据矢量控制的基本概念,其控制系统的数学模型的建立 需遵循在同步旋转坐标系上按转子磁场方向定向的思路。同 步旋转坐标系使矢量控制变为标量控制;转子磁场方向定向 使系统非线性解耦,改善系统的动态性能。 MT坐标系: 规定d轴沿转子磁链Ψ r方向,并称之为M (Magnetization)轴, q轴则逆时针转90º,即垂直于转子磁链Ψ r,称之为T (Torque)轴。这样的两相同步旋转坐标系就规定为MT坐标系, 或称按转子磁场定向(Field Orientation)的坐标系。
异步电动机矢量控制系统
采用自适应控制算法,自动调整系统的参数,提高系统的适应性 和鲁棒性。
故障诊断与容错控制
引入故障诊断与容错控制技术,提高系统的可靠性和安全性。
THANKS FOR WATCHING
感谢您的观看
控制算法实现
将控制算法程序化,实现 在微控制器或DSP上的运 行。
实时控制输出
根据控制算法计算结果, 实时输出控制信号,实现 对异步电动机的精确控制。
04
异步电动机矢量控制系 统的实验验证
实验平台的搭建
实验平台
为了验证异步电动机矢量控制系 统的性能,需要搭建一个实验平 台,包括异步电动机、变频器、 控制器、传感器等关键部件。
系统硬件的改进
电力电子器件
01
采用更先进的电力电子器件,如绝缘栅双极晶体管(IGBT)和
宽禁带半导体材料,提高系统效率。
电机本体
02
优化电机本体设计,降低电动机的损耗和温升,提高其运行效
率。
传感器
03
采用高精度、高可靠性的传感器,提高系统的测量精度和稳定
性。
系统软件的升级
实时操作系统
采用实时操作系统,提高系统的实时性和稳定性。
信号调理模块还需要具备抗干扰能力,以减小外部干扰对系统性能的影 响。
数字信号处理模块
数字信号处理模块是异步电动机矢量控制系统 的关键组成部分,负责对采集的信号进行数字 化处理和分析,以实现矢量控制算法。
数字信号处理模块通常采用高性能的微处理器 或数字信号处理器,具有高速、高精度、高稳 定性和可靠性等特点。
硬件配置
根据实验需求,选择合适的异步 电动机、变频器和传感器等硬件 设备,并确保它们能够满足矢量 控制的要求。
异步电机矢量控制原理
异步电机矢量控制原理概述异步电机矢量控制(Asynchronous Motor Vector Control)是一种现代电机控制技术,通过对异步电机的转子电流和磁链进行精确控制,实现了电机的高性能、高效率和高稳定性运行。
本文将详细解释异步电机矢量控制的基本原理,并讨论其优势和应用。
传统的异步电机控制方法在介绍异步电机矢量控制之前,我们先来了解一下传统的异步电机控制方法。
传统控制方法主要有直接转矩控制(DTC)和矢量控制(VC)两种。
直接转矩控制(DTC)直接转矩控制是一种基于电机参数模型的控制方法,通过测量电机的转矩、电流和转速等参数,根据预定的转矩和转速指令,计算出电机的电流和电压指令,然后通过功率电子器件控制电机的相电流,使得电机输出所需的转矩。
直接转矩控制具有响应快、控制精度高的优点,但其缺点是转矩和电流之间的耦合关系较强,不易实现精确控制。
矢量控制(VC)矢量控制是一种基于磁链模型的控制方法,通过精确控制电机的磁链和转子电流,实现对电机的转矩和转速进行控制。
矢量控制将电机的转子电流分解为磁轴电流和直轴电流,通过控制两者的大小和相位差,达到控制电机转矩和转速的目的。
矢量控制具有较好的控制精度和动态响应性能,但其需要测量电机的转子位置信息,且对电机参数的辨识要求较高。
异步电机矢量控制原理异步电机矢量控制是在传统矢量控制的基础上发展起来的一种控制方法,主要解决了矢量控制对电机参数辨识的要求高、难以实现无位置传感器控制等问题。
控制框图异步电机矢量控制的基本控制框图如下所示:磁链定向首先,通过测量电机的转子位置或估计转子位置,得到电机的转子位置信号。
根据转子位置信号,将电机的三相电压转换为旋转坐标系中的磁链坐标。
磁链定向可以分为直轴定向和磁轴定向两种方式。
直轴定向中,电机的磁链沿直轴方向(也称为d轴方向)旋转,而磁轴定向中,电机的磁链沿磁轴方向(也称为q 轴方向)旋转。
空间矢量调制空间矢量调制(Space Vector Modulation,SVM)是将磁链坐标转换为电机的三相电压指令的一种方法。