Delta控制系统参数
艾默生DELTAV___控制系统操作手册

Copyrighted Material / Duplication Prohibited
2-
强强调调重重点点::面板和细节窗口的功能。 演演示示::在图形中选择各种不同的对象,演示不同的面板和细节显示窗口。您也可演示在从报警栏中选择某个模块时显示的面板
DeltaV Operate - 弹出窗口 窗口。
EMERSON Process Management
Copyrighted Material / Duplication Prohibited
2-
演演示示::如果您的学员不熟悉 Windows 环境,您可能需要演示最小化、最大化、恢复和退出按钮的功能。
附附加加信信息息::标题栏是否显示取决于操作员工作站的设置方式。
Copyrighted Material / Duplication Prohibited
2-
管理过程报警
EMERSON Process Management
Copyrighted Material / Duplication Prohibited
2-
管理硬件报警
单击 DeltaV 节点状态按钮可以打开下图所示的节点状态画面。这些图标显示了报警的 状态。闪烁的图标表示该报警状态尚未被确认。最高级别报警的节点名称将被 显示。如果正在运行批量操作界面 ,则节点名称不可见。
退 出 DeltaV 操作界面
打印当前主画面至默认打印机
打开所输入模块的仪表面板。当前主画面内不包括此模块时,可 通过此按钮访问。 打开所输入模块的详细信息窗口。无需首先打开面板即可快速访 问详细信息窗口。 可通过组态打开画面目录,允许操作员直接选择所需查看的画面。
EMERSON Process Management
DeltaV控制系统技术规格书
DeltaV控制系统技术规格书文件号:技术规格书项目号:版次:0中国石油吐哈油田工程设计院阶段:红台集气站控制系统改造工程第 1 页共 16 页设计证书编号勘察证书编号日期:DeltaV控制系统技术规格书校对审核审定编制核准会签技术规格书文件号:第 2 页共 15页中国石油吐哈油田公司红台集气站DeltaV控制系统工程设计研究院版次: 0目录1. 总则 ..................................................................... .. (3)1.1概述 ..................................................................... ................................................................................. 3 1.2 参考标准及规范 ..................................................................... (3)1.3 环境条件 ..................................................................... ........................................................................4 1.4 工程简况 ..................................................................... ........................................................................4 1.5卖方的责任 ..................................................................... (5)1.6供货及服务范围 ..................................................................... . (5)2系统技术规格 ..................................................................... . (6)2.1 系统配置 ..................................................................... .........................................................................6 2.2 冗余 ..................................................................... ................................................................................. 8 2.3 I/O卡件 ..................................................................... ........................................................................ .... 8 2.4 DELTAV VIM虚拟I/O模块网关 ..................................................................... (8)2.5 软件版本 ..................................................................... .........................................................................9 2.6 机柜 ..................................................................... ........................................................................ ......... 9 3文件资料 ..................................................................... .. (9)3.1工程设计文件资料 ..................................................................... . (9)3.2 应用手册文件 ..................................................................... ............................................................... 10 3.3中间文件资料 ..................................................................... ................................................................ 10 3.4组态培训资料 ..................................................................... ................................................................ 10 4.技术服务 ..................................................................... .. (10)4.1 概述 ..................................................................... ........................................................................ ....... 10 4.2项目管理 ..................................................................... ........................................................................10 4.3 工程开工会 ..................................................................... (11)4.4 现场技术服务 ..................................................................... .............................................................. 11 5. 技术培训 ..................................................................... (11)6 测试与验收...................................................................... . (12)6.1工厂测试与出厂验收 ..................................................................... (12)6.2 现场验收 ..................................................................... ......................................................................12 7. 性能保证 ..................................................................... (12)附件:供货清单 ..................................................................... . (13)技术规格书文件号:第 3 页共 15页中国石油吐哈油田公司红台集气站DeltaV控制系统工程设计研究院版次: 01. 总则1.1概述本DeltaV系统规格书为中国石油吐哈油田公司丘东采油厂红台集气站控制系统改造工程而编制。
DELTA并联机器人运动学分析与控制系统研究共3篇

DELTA并联机器人运动学分析与控制系统研究共3篇DELTA并联机器人运动学分析与控制系统研究1DELTA并联机器人是一种特殊的平面机器人,其构建方式是有三个"手臂"连接到一个平台上,形成了一个三角形的平面结构。
它具备高速、高精度和高可靠的特性,因此在组装、分拣和包装等领域有着广泛的应用。
机器人的运动学分析是研究机器人在运动时各种运动参数、关节位姿、速度和加速度等因素的关系。
DELTA机器人因为它的三角形平面结构,运动学模型相比于其他机器人则非常复杂。
在这种结构中,每个关节的运动都会对另外两个关节产生影响,因为每个关节都是相互连接的。
因此,建立运动学模型需要使用到复杂的几何算法和数学方程式。
在控制系统中,我们需要用某种方式去实现机器人的轨迹规划以及运动控制。
对于DELTA机器人,高速度和高精度都是极其重要的考虑因素。
在轨迹规划方面,我们需要考虑运动学模型,同时结合应用中的实际需求来确定机器人工作范围和路径规划。
在运动控制方面,我们需要提供特定的学习算法和控制器,同时考虑实时性需求,以确保机器人的控制是稳定和可靠的。
总的来说,DELTA并联机器人运动学分析与控制系统是一个复杂的问题,需要对机器人的构造和应用进行全面的考虑。
要想达到最佳的控制效果,我们需要基于准确的运动学模型建立合适的控制系统,并且不断地优化和改善整个系统,从而使得机器人在应用中得到最大的利用价值。
DELTA并联机器人运动学分析与控制系统研究2DELTA并联机器人是一种非常灵活和高效的机器人系统,它可以用于许多不同的应用领域,包括工业自动化、医药制造、食品加工、航空航天等等。
但是,要充分发挥DELTA并联机器人的优势,需要对其进行正确的运动学分析和控制系统研究。
一、DELTA并联机器人的基本结构和工作原理DELTA并联机器人由三个运动自由度的臂和三个固定的连杆组成,臂和连杆的结构构成一个平行四边形,并通过球面铰链联接。
Delta V系统架构
12-port Dual-Speed, w/2 Fiber Optic Links
24-port Dual-Speed 24-port Dual-Speed, w/Fiber Optic Link 24-port Dual-Speed, 2 Fiber Optic Links 6-port 10MB Fiber Optic 6-port 10MB Fiber Optic, w/Twisted Pair Copper Interface Module
副交换机
10/100BaseT 电缆 最大长度100米 (330英尺)
2012-5 油田建设工程公司电仪控中心
DeltaV 系统架构
多节点
工作站
主交换机 —
— 副交换机
系统电源、控制器和I/O子系统
图例 主控制网络 副控制网络
2012-5 油田建设工程公司电仪控中心
DeltaV 系统架构
多节点 带有八个节点的Delta V控制网络如图所示: 最大值:
控制器
2012-5
DeltaV 交换机
集线器和交换机提供了连接多节点的可能. 下面是可用的集线器选项: 8-port 10BaseT 12-port 10BaseT
12-port 10BaseT, Fiber Optic Interface(光纤接口)
12-port Dual-Speed 12-port Dual-Speed, w/Fiber Optic Link
ቤተ መጻሕፍቲ ባይዱ
12-port 10BaseT/100Base TX Copper, with Dual Fiber Optic Link
24-port 10BaseT/100Base TX Copper 24-port 10BaseT/100Base TX Copper, with Fiber Optic Link
Delta算子的网络控制系统量化反馈控制器设计

Delta算子的网络控制系统量化反馈控制器设计余康舟;林瑞全;徐风风【摘要】通过构建李雅普诺夫函数,以LMI形式给出了Delta算子描述的网络控制系统渐近稳定的充分条件,通过求解LMI可以得出量化反馈H∞控制器参数.数值算例分析表明,快速采样时,基于Delta算子设计的网络控制系统量化反馈控制器不但保证了控制系统稳定,而且其控制器参数趋近于连续系统设计的量化反馈控制器参数,而传统Z变换设计的量化反馈控制器参数无法保证系统稳定.【期刊名称】《福州大学学报(自然科学版)》【年(卷),期】2019(047)003【总页数】6页(P340-345)【关键词】Delta算子;网络控制系统;线性矩阵不等式(LMI);量化反馈控制器;H∞【作者】余康舟;林瑞全;徐风风【作者单位】福州大学电气工程与自动化学院,福建福州 350108;福州大学电气工程与自动化学院,福建福州 350108;福州大学电气工程与自动化学院,福建福州350108【正文语种】中文【中图分类】TP1830 引言网络控制系统不同于传统控制系统,在反馈控制回路中通过网络信道将传感信号和控制信号传输到控制器和驱动器.这就导致网络控制系统会出现数据传输延时、数据传输丢包等问题[1].在实际应用中,网络传输的能力是有限的,因此需要对数据进行量化处理,以减少信道传输数据的负担,节约网络系统资源[2],但同时,量化器的引入也会产生相应的量化误差.因此,在考虑网络时延、数据丢包以及引入量化控制器的情况下,保证系统稳定性已经成为一个研究热点[3-6].文[7]研究了具有时延和丢包的网络控制系统H∞控制问题,将时延处理成系统参数的不确定性,将数据丢包用Bernoulli随机序列来描述,以linear matrix inequality(LMI)的形式给出了H∞控制器的充分条件.文[8]建立了一类包含延时和量化信息的新的闭环网络控制系统模型,在传感器和控制器之间加入量化控制器,通过李雅普诺夫稳定性理论和LMI方法,得出系统的稳定性条件和量化控制器的设计方法.文[9]在同时考虑信号量化和数据丢失的情况下,利用锥互补线性化法则,解决了基于LMIs的优化条件问题,并设计了量化状态反馈控制器,保证了闭环系统的指数均方的稳定性.文[10]研究了在同时量化控制信号和输入信号条件下的不确定离散网络控制系统的状态反馈控制器设计问题,提出了一种把连续和离散系统统一到Delta算子系统中的方法.文[11]利用Delta算子研究了具有时滞和非线性扰动的不确定Delta算子系统的鲁棒H∞控制问题,提出了一种与时滞相关的鲁棒稳定性判据.但以上文献大都只考虑了控制器与执行器之间或传感器与控制器之间的单通道存在时延和丢包的问题,实际上应该在网络控制系统双通道中将时延和丢包同时考虑,进行稳定性分析和控制器设计才比较符合实际情况.同时,在快速采样的网络控制系统中,当采样周期接近于0时,Delta算子描述的离散系统趋近于连续系统,Delta算子很好改善了Z变换在高频采样的缺陷[12].但是,目前对于Delta描述的网络控制系统,在考虑信号量化、网络延时和数据丢包的量化H∞控制器设计问题的研究比较少见.针对具有网络时滞和丢包等问题的网络控制系统,将基于Delta算子的量化H∞控制与LMI方法相结合,设计了Delta算子描述下的网络控制系统量化反馈控制器,数值仿真说明了本方法的有效性.1 问题的描述考虑一类Delta算子描述的网络控制系统:式中:x(k)∈Rl为状态变量;z(k)∈Rm为可测输出向量;u(k)∈Rn为可控输入;w(k)∈Rq为干扰输入;Aδ,Bδ,Bδ1,C,D,D1是适当维数的系统实数矩阵.其中:d(k)=τpl(k)+τtd(k),τpl(k)表示网络丢包;τtd(k)表示网络时延.假设总的延时和丢包对系统的影响在一定的范围内,有d(k)∈[dm,dM]成立,dm=lmT,dM=lMT,其中lm和lM为正整数.在网络控制系统中是通过网络信道将传感信号和控制信号传输到控制器和驱动器,而网络信道传输数据的能力是有限的,所以在每个信道中设置量化器是有必要的.采用两个对数量化器分别对传感信号和控制信号进行量化.定义对数量化器g(·)的量化级数集合为:满足如下映射关系:式中:v表示量化器的输入量;g表示量化器的输出量;δ为一参数变量,且满足δ=(1-p)/(1+p).假设g1(·)是对状态信号的量化器,g2(·)是对控制信号的量化器,且所有的采样器都是时间驱动,所有的量化器都是事件驱动,状态x(k)和u(k)均可测.对状态信号和控制信号进行量化,可以描述为:参考文[13],可通过扇形区域方式来表述量化器g1(·)和g2(·):结合式(3)和(4),系统的量化反馈控制器可以表示为:即令式(6)中Δg1和Δg2分别为传感信号和控制信号量化对系统的影响项.将式(5)和式(6)带入式(1)中,可得加入量化控制器的闭环控制系统:2 稳定性分析引理1 根据Delta算子的性质:对于任意时刻函数x(k),y(k)存在其中:T是采样周期.引理2 对于任意的常数半正定对称矩阵M,存在两个正整数r和r0,满足1≤r0≤r,则有:其中:ρ=(r-r0+1).引理3 存在适当维数的矩阵A,B,C,有AT=A,A+CB+BTCT<0,则对于一个对角矩阵M >0,有定义H∞性能指标:定理1 考虑带有量化反馈控制器(5)的网络控制系统(7),对于给定的常数dm和dM,结合H∞性能指标γ和矩阵K,如果存在适当维数的矩阵,P>0,Q >0,R>0,使得下列不等式成立:其中:则系统(7)在控制器(5)的作用下渐近稳定.证明对于系统(7),选定Lyapunov函数:其中:e(i)=x(i+T)-x(i),由δ算子的定义可以得到e(i)=Tδx(i).根据Delta算子理论对V(k)各项进行处理,可以得到:显然:其中,根据引理2可以得到:将式(7)代入,可以得到:又根据H∞性能指标,将式(7)代入,有:结合式(9)到式(13)可以得到:其中:有:根据Schur补引理,可由式(16)得到式(8),证毕.3 控制器设计定理2 考虑系统(7),对于给定常数dm和dM,结合H∞性能指标γ和矩阵K,如果存在适当维数的矩阵Y,X>0,S1>0,S2>0,正定对角矩阵M使得线性矩阵下列不等式成立:其中:则此时闭环网络控制系统(7)渐近稳定且设计的量化H∞反馈控制器参数K=YX-1. 证明将式(8) 左乘、右乘对角矩阵 diag{P-1 P-1 P-1 I I},再令 X=P-1,S1=P-1QP-1,S2=P-1RP-1,得到:其中:参考文[11]处理线性矩阵不等式的方法,利用引理3,根据Schur补引理,即可由式(18)得到式(17).4 数值仿真针对网络控制系统:考虑如下参数的网络控制系统:选取量化器的量化密度 p1=0.6,p2=0.47,根据δ=(1 - p)/(1+p),可以得到δ1=0.25,δ2=0.36,采样周期 T=0.001,增益γ =0.58,时滞 dm=0.1,dM=0.6,利用 Matlab中的 LMI工具箱[13]分别求解连续系统模型和基于Delta算子方法、传统Z变换方法得到的离散系统模型下的量化反馈控制器参数. 参考文[14]的定理2可以得到连续网络控制系统的量化H∞反馈控制器参数此时系统极点为[-0.963-0.080 1],处于左半平面内,系统稳定.在基于Delta算子的闭环网络控制系统(7)下,根据Delta算子定义有当采样周期T=0.001,采用Delta算子对连续系统进行离散化处理可以得到离散化系统:可以求得控制器此时系统的极点为[-0.998 -0.070 7],显然处于(-1/T,0)为圆心,1/T为半径的圆内,系统稳定,且控制器参数趋近于连续系统控制器参数. 参考文[15]引理3.1,根据Z变换的定义有当采样周期T=0.001,采用传统Z变换方法对网络控制系统进行离散化处理,可以得到离散化系统:并求得的控制器其闭环极点为[-1.109 -1.449],不在单位圆内,显然用Z变换方法设计的控制器在采样周期很小时,得到的系统已经和连续系统相差较大,系统不稳定.5 结语设计了基于Delta算子的网络控制系统量化反馈控制器.通过构建李亚普诺夫函数,以LMI的形式给出了闭环控制系统渐近稳定的充分条件,并得出基于Delta算子的网络控制系统量化反馈控制器的设计方法.通过求解LMI得到控制器参数,并与连续系统模型和传统Z变换系统模型所设计的量H∞控制器参数进行比较.结果表明,所设计的基于Delta算子的量化H∞控制器在网络控制对象存在量化误差、时滞和丢包的情况下不但能使闭环系统稳定,还具有H∞性能指标.在快速采样时,要优于传统Z变换所设计的控制器,而且使其得到的参数更趋近于连续系统模型下所设计的控制器参数.参考文献:【相关文献】[1]CHEN H,GAO J,SHI T,et al.H∞ control for n etworked control systems with time delay,data packet dropout and disorder[J].Neurocomputing,2016,179(C):211-218. [2]LIU D,LIU Y,ALSAADI F E.A new framework for output feedback controller design for a class of discrete-time stochastic nonlinear system with quantization and missing measurement[J].International Journal of General Systems,2016,45(5):1-15.[3]WANG P P,CHE W W.Quantized H∞ filter design for networked control systems with random nonlinearity and sensor saturation[J].Neurocomputing,2016,193:14-19.[4]LI Z M,CHANG X H,DU X K,et al.H∞ control of discrete-time uncertain linear systems with quantized feedback[J].Neurocomputing,2016,174(PB):790-794.[5]HU Z,DENG F,ZHAO X,et al.Quantized H∞ control for stochastic systems with packet losses[C]//36th Chinese Control Conference(CCC).Dalian:IEEE,2017:1838-1843. [6]周颖,郑凤,何磊.具有时变时延和丢包的网络控制系统H∞控制[J].计算机技术与发展,2017,27(5):164-169.[7]宋娟.具有时变时延的网络控制系统的量化控制[J].航天控制,2017(5):15-18.[8]WANG P,CHE W.Quantized H∞ control for networked control systems with random packet losses[C]//27th Chinese Control and Decision Conference.Qingdao:IEEE,2015:6557-6562.[9]HONGJIU Y,LI L,JUNKAN H,et al.Robust H∞ control for discrete-time networks with state and input quantizations based on delta operator[C]//27th Chinese Control Conference.Kunming:IEEE,2008:663-667.[10]QIU J,LU K,DU X,et al.Robust H∞ control for uncertain delta system with time delays and non-linear perturbations based on delta operators approach[J].International Journal of Modelling Identification & Control,2010,11(3/4):150-163.[11]彭仁崇,林瑞全,杨富文,等.不确定Delta算子时滞系统鲁棒H∞控制器设计[J].集美大学学报(自然科学版),2008,13(2):157-161.[12]FU M,XIE L.The sector bound approach to quantized feedback control[J].IEEE Transactions on Automatic Control,2005,50(11):1698-1711.[13]俞立.鲁棒控制:线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.[14]刘英英,杨光红.量化的连续时间网络控制系统的H∞控制[J].东北大学学报(自然科学版),2010,31(4):457-460.[15]SHI P,SHUE S P.Robust H∞ control for linear discrete-time systems with norm-bounded nonlinear uncertainties[J].IEEE Transactions on Automatic Control,1999,44(1):108-111.。
DeltaV 系统概述
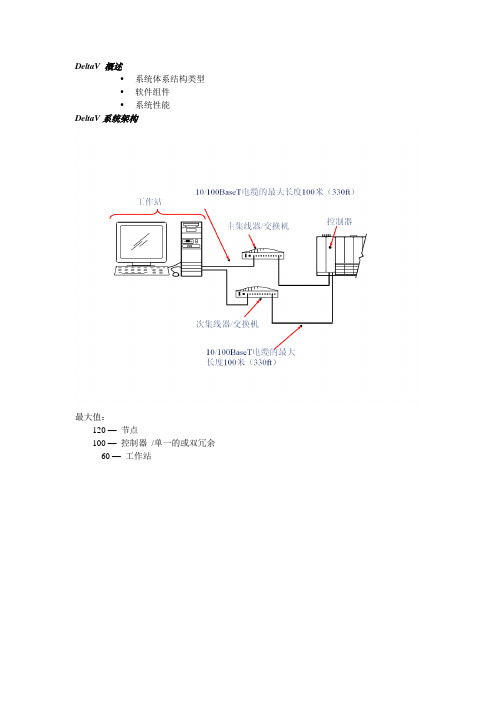
DeltaV 概述•系统体系结构类型•软件组件•系统性能DeltaV系统架构最大值:120 —节点100 —控制器/单一的或双冗余60 —工作站DeltaV 的I/O 卡件类型I/O子系统包括一个安装在一个或多个8线I/O接口承载的I/O接口和一个为现场设备提供的可选电源。
如上所述,I/O接口包括以下组件:•固定在I/O接口承载上的I/O端子用于现场信号线的连接。
•固定在I/O接口承载上的I/O 卡,通过I/O 端子将现场送来的信号转换成数字信号用于控制与通讯。
模拟量输入•串口2 模拟量输入, 8个通道, 4~20 mA, HART协议•模拟量输入, 16 个通道, 4 ~20 mA, HART协议•模拟量输入, 8个通道, 4 ~20 mA, HART协议•模拟量输入, 4个通道, 隔离输入(热电偶,热电阻, MV olt, 欧姆, 电压)•模拟量输入, 8个通道, 4 ~20 mA•模拟量输入, 8个通道, 1-5v•I.S. 模拟量输入, 8个通道, 4 ~20 mA, HART协议•热电阻, 8个通道•热电偶, 8个通道数字量输入•数字量输入, 8个通道, 24 V DC, 隔离输入•串口2数字量输入, 8个通道, 24 V DC, 干式接点•数字量输入, 8个通道, 24 V DC,干式接点•数字量输入, 8个通道, 120 V AC,隔离输入•数字量输入, 8个通道, 120 V AC,干式接点•数字量输入, 8个通道, 230 V AC,隔离输入•数字量输入, 8个通道, 230 V AC,干式接点•高密度数字量输入, 32个通道, 24 VDC,干式接点•I.S. 数字量输入, 16个通道, 12 VDC I.S. 电源•多功能, 4个通道, 数字量输入或脉冲输入•SOE (时间顺序记录), 16个通道, 标准的数字量输入或SOE 模拟量输出•模拟量输出, 8个通道, 4 ~20 mA, HART协议•模拟量输出, 8个通道, 4 ~20 mA, HART协议•模拟量输出, 8个通道, 4 ~20 mA•I.S.模拟量输出, 8个通道, 4 ~20 mA•I.S.模拟量输出, 8个通道, 4 ~20 mA, HART协议数字量输出•数字量输出, 8 通道, 120/230 V AC, 隔离输出•数字量输出, 8通道, 120/230 V AC, 高端•数字量输出, 8通道, 24 VDC,隔离输出•串口2数字量输出, 8通道, 24 VDC,高端•数字量输出, 8通道, 24 VDC,高端•高密度数字量输出, 32通道, 24 VDC,高端•I.S.数字量输出, 4通道, 12 VDC I.S. 电源控制器DeltaV 的集线器与交换机集线器与交换机提供了一种连接多个节点的方式。
加拿大DELTA楼宇自控系统(BAS)简介
电磁流量计:DWM-2000
BI设备:
风压差开关:416001C
液位开关:KEY
水压差开关:WFS-11300AA
水流开关:WFS-25B
防冻开关: DBTF-5
楼宇自控系统监控范围
楼宇工作站
暖通空调系统
水系统
变配电系统 照明系统 电梯系统
空空送生
调调排活
冷新风给
热风
排
水机
水
组
中高 水低
压 配 电
楼宇自控系统的定义
• 楼宇自控系统作为智能建筑系统的一个重要组 成部分,它利用数据、状态采集设备(传感 器)、电动执行机构等前端设备和现场控制器 (DDC)、通讯路由网络、计算机、监控软件 等构成一个对建筑物(或建筑群)内的电力系 统、照明系统、冷热源系统、空调通风系统、 给排水系统、电梯系统进行集中监视和管理的 系统,实现对各系统的机电设备进行自动控制 和监视,满足设备的设计、使用要求,并达到 节能降耗的基本目的。
空调机组
空调系统监测控制内容
• 送风温/湿度 • 回风温/湿度 • 典型房间温/湿度 • 新/回/排风阀 • 冷热水阀门 • 加湿阀门
• 送风机状态/启停 • 回风机状态/启停 • 过滤器状态 • 防冻开关状态
• 1、根据室外温度,调节新/回/排风阀门的开度 • 2、根据回风温度,调节冷/热水阀门 • 3、根据回风的湿度,控制加湿阀门的开度 • 4、监测防冻开关的状态 • 5、对新/回/排风阀、冷热水阀和加湿阀与风机开关进行联
发室
室
电内
外
机照
照
明
明
楼宇自控各层面功能
操作
Operation
管理
Data analyses
deltav控制系统基本功能组态步骤

Operate
进入之后再左侧窗口中找 Picture 下的 Templates 的 main 画面,然后双击打开,如下图:
将画面上的介绍内容删掉, 在工具栏中有很多画图工具, 利用这些工具可以画一个水箱液位
控制流程图,如需模板,还可以在左侧窗口的
Dynamo Sets 中找到。图画完后的效果如下:
将此画 创建后连接后的画面如下:
进入后的窗口如下图:
我们可以看到在左侧的浏览器中列出了系统详细的信息,首先找到控制网
Control Network ,
我们可以看到,在控制网下有三个站,分别是控制站
CTRL ,工程师站 SCHOOL-ES ,操作
员站 SCHOOL-OP ,当然了我们可以右击 Control Network 新建各个站。
在上图中, 在控制器上添加了打开控制器详细参数的按钮,
具体就是选中控制器, 然后再视
图的工具栏中选择 工具,出现如下图的窗口,输入参数,然后
OK 。
9、监控画面 进入监控画面的路径有很多,比如: 面如下:
Start\\Deltav\\Operator\\Deltav Operate Run ,进入后的画
Slot posstion 1 2 3 4 5 6 7
实验室 Deltav 过程控制系统测点清单
工程名称
Deltav DCS
DCS I/O 清单
设计 审核
严新亮 宋国栋
序 位号
测点名称
类型 说明
量程
单位
趋 报警
过程通
备注
号 1 LT101 2 LT102 3 LT103 4 PT101 5 FT101
5、利 用模板在厂区中新建位号 在 Library 下的 Module Templates 下的 Monitoring 下找到 ANALOG ,然后将其拖拽到新建的 厂区中,并将其命名为 LT-1803,然后右击 LT-1803,选择 Open With Contrlo Studio ,进入如 下窗口:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控标参数
1 管理软件
✧系统软件应支持所有BACnet BTL认证之设备,进行免费用无缝集成;接入BMS管理
系统;同时应提供系统软件的BTL认证文件;
(1)系统软件可根据后期需要,只需购买API功能,即可实现对外通讯接口的需求,实现OA、手机APP等第三方软件研发所需的信息通讯界面;其技术形式须为REST(或SOAP) web service;(需提供软件选型表或商品说明单页)
(2)系统软件可根据后期需要,只需购买能源管理功能,即可实现满足ISO 50001认证的能源管理功能;(需提供软件选型表或商品说明单页);
(3)作业记录,跟踪BAS系统的所有变动,并记录操作者;
✧作业系统应为B/S(浏览器/服务器)架构,其中进行WEB发布的服务器应全面支持
HTML5,以满足在应急时,可由平板电脑进行操控(平板电脑可以是IOS系统的IPAD 或ANDROID系统的平板电脑)
✧系统软件操作界面应全面支持简体汉化,而不应仅是图形界面支持中文;
(4)软件为进口品牌;(需提海关报关单)
(5)须提供原厂对投标单位开具的【项目投标授权函】;
2 系统级控制器
(1)MAC地址和软件地址、网络编号;可通过跳线形式或软件形式进行调整;不可全面支持更改的设备将不被接受;
(2)应至少提供:一个支持BACnet IP通讯的RJ45端口,一个支持BACnet MSTP的RS485端口。
✧控制器不应使用电池数据保持,而应使用FLASH内存进行控制器的失电数据保持,不
支持FLASH内存的控制器将不被接收;
(3)须提供原厂对投标单位开具的【项目投标授权函】;
3应用控制器
(1)MAC地址和软件地址、网络编号;可通过跳线形式或软件形式进行调整;不可全面支持更改的设备将不被接受;
(2)应至少提供:一个支持BACnet MSTP通讯的RS485端口,一个支持IO扩展通讯的RS485端口。
(3)控制空调设备(含空调机组、新风机组)所使用的控制器输入点位应为通用输入,不接受数字输入点位的DDC。
方便现场调试与提高系统灵活性,并且全部支持0-5v,
0-10v,10kΩ, 4-20mA信号;数字输出支持控制器24V内部供电与外部供电两种方式;
✧控制器不应使用电池数据保持,而应使用FLASH内存进行控制器的失电数据保持,不
支持FLASH内存的控制器将不被接收;
✧控制器应支持系统时间自动同步功能,控制器应能自动同步相同MSTP网络系统控制
器时间,失电再上电后,系统时间不丢失;
(4)控制器应提供服务端口,可实现蓝牙通讯扩展,实现与计算机的通讯;
(5)须提供原厂对投标单位开具的【项目投标授权函】;
5 扩展模块
(1)总线电源及其他模块电气隔离,提高系统安全性;
(2)电源由以太网控制器总线提供;
(3)须提供原厂对投标单位开具的【项目投标授权函】;
(4)须通过CE认证。
6 RS485 网络保护器
(1)最大可承受电压:240V AC;
(2)采用快融保险丝,在共模高压产生的电流达到0.1A时熔断,以避免损害DDC;(3)BACnetMS/TP网络采用RS485网络保护器,防止控制器被外界电流意外损坏。
7 执行器
(1)开关型风门执行器
性能:20NM
输入:24VAC
(2)模拟型风门执行器
供电:24VAC
性能:20NM
输入:0~10V
执行范围:0-100
8 传感器
(1)叶轮式流量传感器
介质温度:-40-80℃
输出:4-20 mA
量程范围:1.2-25ft/s(0.37-7.62m/s)
(2)水道温度传感器及套管
输出:4-20 mA
量程范围:-40~105℃
(3)水压力变送器0~16bar(带安装配件)
输出:4-20 mA
量程范围:0~16bar
(4)风道温湿度传感器
输出:0~10VDC
量程范围:0~16bar
(5)压力(差)开关
工作范围:50 -- 500 Pa
(6)压力(差)开关
最高工作压力: 4.0MPaG
(7)风道CO2变送器
测量范围:最大为0-10,000ppm
出厂设定0-2,000ppm
输出:0~10V或4~20mA。