抽水蓄能电站发电电动机的特点及选型设计分析
抽水蓄能电站电气特点
2019/12/13
12
水电站的电气设备(电气二次)
解决差动保护相序适配的两个例子
2019/12/13
13
水电站的电气设备(电气二次)
(2)水泵工况启动过程带来的问题
常规机组在启动过程中转速超过90%甚至更高才 开始起励,机组大部分时间处于无电流、低电 压的状态,不必考虑机组的电气保护。而在抽 水蓄能机组水泵工况的同步启动过程中,机组 和连接母线都流过低于工频的电流,承受低于 工频频率的电压,必要的机组电气保护在这个 过程中必须投入。
2019/12/13
5
水电站的电气设备(电气二次)
8.2 可逆式机组及相关问题
(1)与常规发电机相比,可逆式机组增加了抽 水和抽水方向调相等工况,使工况转换的复杂 程度大为增加,并带来了抽水工况的启动问题。
(2)混流式可逆式机组的水头大都在100米以 上,蜗壳前必须安装进水阀(球阀或蝶阀), 而且停机时必须关闭进水阀。进水阀的启闭操 作是工况转换流程的一部分。
5P20 3
CT2 0.5FS5 30 0.5FS5 25 0.5FS5 15 0.5FS5 10 0.5FS5 5
2019/12/13
8
水电站的电气设备(电气二次)
8.4 拖动开关和被拖动开关及相关问题
被拖动开关在机组作为水泵或水泵方向调相 启动(包括SFC启动和背靠背启动)时,应 当合上,以便从启动母线引入电流。机组 并网、拖动电源断开后,被拖动开关断开。
拖动开关在机组作为背靠背启动的拖动机时 合上,将电流经由启动母线送到被拖动机 组。机组并网、拖动机GCB断开后,拖动 开关断开。
但是,低频率下有的保护可能误动(例如低功率 保护、低频保护等)所以不得不在启动过程中 将部分保护闭锁,在机组接近或达到同步转速 时才投入运行。
发电电动机的特点与启动介绍

发电电动机□陈涛摘抄一、发电电动机的特点抽水蓄能电站使用的发电机,即可作为发电机运行也可作为电动机运行。
1、运行特点(1)旋转方向。
可逆式抽水蓄能机组的旋转方向在作发电运行与作抽水运行时相反,因此发电电动机需要适应双向旋转。
双向旋转电机在通风冷却和推力轴承结构设计等方面带来许多与常规水轮发电机不同的特点。
对于水泵和水轮机分开设置的三机式机组,通常发电与抽水工况下机组旋转方向相同,与其同轴相联的发电电动机也就只有一种旋转方向。
(2)抽水工况的启动方式。
发电电动机和常规的水轮发电电动机一样是同步电机,在抽水工况下机组启动主要取决于电网容量及单机容量。
当单机容量不大时,可以利用电动机转子磁极上设置的阻尼绕组产生的异步力矩启动。
当单机容量较大时,为避免启动电流过大对电网的不利影响,必须采用其他方法。
(3)频繁启停。
抽水蓄能机组在电网中通常担负调峰填谷任务,每天至少开停机两次。
此外还经常担负调频、调相和旋转备用任务。
机组在结构设计上必须要适应这种频繁启停要求,如定子机座、绝缘线棒设计时要考虑由此产生的温度变形和应力的影响。
(4)运行工况多变产生复杂的过渡过程。
发电电动机除运行在发电、抽水工况外,还可运行在发电调相、抽水调相工况,这些工况依据电网需要而不断转换,在转换过程中将产生各种复杂的水力过渡过程、机电暂态过程,使机组产生比常规水轮发电机大而复杂得多的振动,对机组结构设计提出了更严格的要求。
2、结构特点(1)总体布置发电电动机的总体布置形式与常规水轮发电机相同。
几乎全部都是立式机组。
(2)定子结构特点可逆式机组由于向高水头方向发展,使发电电动机额定转速不断提高,形成定子外径较小、定子铁芯长度高的特点,这就要求在通风冷却方面采取措施,以保证定子线棒沿铁芯长度的温度分布尽可能均匀。
发电电动机由于频繁启停,温度变化剧烈,在定子机座、线棒在槽中固定等方面都要考虑防止产生热变形的措施。
为增大定子机座的整体刚度可采用现场叠片和下线工艺,实现无合缝装配,并对定子机座、上下机架采用斜支撑代替传统的径向支撑。
浅谈抽水蓄能电站发电电动机的特点与选型
浅谈抽水蓄能电站发电电动机的特点与选型[摘要]在社会经济高速发展的背景下,各行各业的用电需求也在不断增加。
而抽水蓄能电站具有运行方式灵活多样、成果见效快等优势被广泛应用到电力资源供应中,为居民于工业用电需求提供了良好的保障。
但在具体实践过程中需要根据抽水蓄能电站发电机的特点做好相应的选型工作,才能保证抽水蓄能电站稳健运行。
基于此,本文概述了抽水蓄能发电站发电电动机相关内容,分析了发电电动机的特点及抽水蓄能电站发电电动机选型设计参数。
[关键词]抽水;蓄能电站;发电机;特点与选型抽水蓄能电站是一种特殊的电源涉及到诸多工况,在实际运行过程中方式灵活多样,且具有较快的反应速度等优势,近年来在我国已经取得了一定的发展规模。
抽水蓄能机组在整个蓄能电站中发挥了至关重要的作用,相比于常规水轮发电机组在结构形式于设计发面都较为复杂,我国在此方面的研究起步相对较晚,特别是在关键技术与零件方面主要依赖向国外进口,需要获得在此方面技术领先国家的支持。
我国在相关设计、制造、调试运行方面的经验有待进一步累积与提升。
因此有必要对抽水蓄能电站发电机的特点进行分析,探究如何根据具体的特点做好选型工作,为日后抽水蓄能电站提供参考。
1.抽水蓄能电站电动机相关内容概述1.抽水蓄能电站工作原理抽水蓄能发电站的运行原理是在电力负荷低谷时,电能发挥作用将水抽到上水库,在电力负荷高峰状期间时将水放到下水库,通过这样的方式实现发电。
此种发电方式不仅缓解了电网系统的压力,保证了电网系统的稳定了,还有效提升电放的综合利用效率,相比于传统的电站运行模式,抽水蓄能电站的在使用周期、使用寿命、装机容量、运行稳定性、经济效益方面都有显著的优势。
同时此种储能装置对促进智能电网发展起到了重要的支撑作用。
(二)抽水蓄能电站类型多样当前抽水蓄能电站已经从原有只侧重电负荷中心的阶段发展为综合能源基地、送出与落地端多方协同发展的形式下。
常规的抽水蓄能电站以是否具备天然径流为标准划分为纯抽水蓄能电站与混合式抽水蓄能电站,根据水库的调节情况划分为日、周、季调节抽水蓄能电站。
抽水蓄能电机
抽水蓄能电站发电电动机的特点及选型设计分析徐立佳(中国水电顾问集团中南勘测设计研究院)【摘 要】抽水蓄能机组与常规水轮发电机组相比差别较大,本文通过白莲河、黑麋峰两电站机组的设计实践,总结、分析发电电动机的选型设计和参数选择。
【关键词】发电电动机参数结构制动起动1概述抽水蓄能电站作为一种特殊的电源,由于具有工况转换多、运行方式灵活、反应速度快等优点,近年来在国内得到了相当规模的发展。
作为蓄能电站核心设备的抽水蓄能机组,无论设计条件还是结构形式都比常规水轮发电机组复杂得多,而我国对抽水蓄能机组技术的开发起步较晚,关键部件和技术大多依赖进口或国外的技术支持。
我院设计的白莲河和黑麋峰抽水蓄能电站均安装4台单机容量300MW的可逆式机组,白莲河电站机组由法国阿尔斯通公司中标;黑麋峰电站机组由东方电机股份有限公司供货、阿尔斯通公司提供技术支持,两工程的首台机组都将于2008年投运。
尽管通过国家对惠州、宝泉、白莲河3座抽水蓄能电站的16套抽水蓄能机组捆绑招标,国内厂家引进了技术,但设计、制造、调试和运行经验还在逐步积累过程中。
本文主要根据抽水蓄能机组的特点对发电电动机选型设计和参数的选择进行了总结和分析,希望能为今后大中型抽水蓄能电站的建设提供一些参考。
2发电电动机的特点(1)由于在电力系统中承担调峰、填谷、调频、调相及紧急事故备用任务,机组起停和工况转换频繁,一般每天至少要起停2次。
白莲河和黑麋峰两电站设计起停每天10次。
发电电动机需适应频繁变化的运行条件。
(2)在抽水工况下,机组作为水泵-电动机运行,在电网低谷时吸收电网富余的有功,将下库的水抽至上库,将电能转化为势能;在发电工况下作为水轮机-发电机运行,在电网高峰时将这部分势能转化为电能,两种工况的转向相反。
在电气主接线设计时可设置换向开关以实现电源相序的转换,发电电动机需按双向运转设计,其通风冷却系统和轴承结构都应能适应双向旋转。
(3)在抽水工况下,发电电动机作为同步电动机运行时,为使起动电流不至过大,减少对电网的扰动,必须有专门的起动措施。
抽水蓄能电站机组结构特点及其主要技术指标

抽水蓄能电站机组结构特点及其主要技术指标作者:蔡鹏刘景辉来源:《城市建设理论研究》2013年第30期摘要:本文主要介绍了抽水蓄能电站一般较常采用的大中型立轴混流式水泵水轮机—电动发电机结构型式和特点以及相应构造尺寸及技术指标,提出了在安装和启动调试过程中可能遇到的一些问题,对此提供部分理论与实践的一些借鉴和启示,企望能够对实际调试结果作评估参考。
关键词:水泵水轮机;电动发电机;结构型式;水轮机工况;水泵工况;稳定运行;功率调节;压力脉动;振动与摆度Pumped Storage Power Plant structural features and its main technical indicatorsCai Peng 1, Liu Jinghui 2(Beijing corporation of China water resources & Hydropower construction engineeringBeijing 100024)Abstract: This paper introduces the pumped storage power stations are generally more often used in medium and large vertical shaft Francis pump-turbine - electric generator structure type and characteristics of the corresponding size of the structure and technical specifications presented in the installation and startup may be encountered during commissioning some of the problems, which provide part of the theory and practice some reference and inspiration, hope for debugging results can be assessed on the actual reference.Key words: pump-turbine;electric generator;structure type; turbine operating conditions;the pump working conditions;stable operation; power regulation;pressure pulsation;vibration and swing changes中图分类号:U464.138+.1文献标识码: A0 引言可逆式大中型抽水蓄能机组型式,一般常采用的水泵水轮机多为较高水头(190~550M)、大容量(250~375MW)、立轴、单级、离心混流式,电动发电机多为半伞式或悬吊式同步交流电机。
抽水蓄能电站工程特点
抽水蓄能电站工程特点
抽水蓄能电站是一种采用水源潮流循环的蓄能形式的发电机组,可以实现多次高低循环运行,向电网供电,一般用于回升电价发电或短时间内突发负荷抑制等,大大提高了电厂的运行稳定性和可靠性,把电厂所发电能改造成一定质量和价格的电能产品,既有利于实现节能、节约用水,又有利于电网的安全稳定运行。
一、工程特点:
1、抽水蓄能电站在节电、缓抑突发负荷方面具有特殊优势,相对传统电站具有更高的动态性能,可以满足不断变化的电力需求。
2、建立种类多样的水库配套系统,可以适应不同类型的水池,不仅完善抽水蓄能电站的输配电系统,而且也可以解决新建水库的开发利用问题。
3、抽水蓄能电站发电机组具有高效率、低损耗、环境友好、安全可控等特点,可以提高电厂整体的发电效率。
4、结合水池上游的泄流量调度,可以实现发电机组的灵活调度,提高发电量,节约能源、节能减排。
5、水库抽水蓄能电站可以在新建水库的基础上建设,利用上游水池的节水资源,提高新建水库的灌溉效果,可以节省大量的发电成本和建设费用。
抽水蓄能电站发电电动机的特点及选型设计分析
抽水蓄能电站发电电动机的特点及选型设计分析摘要:本文已抽水蓄能电站发电电动机相关内容概述,抽水蓄能电站发电电动机的主要特点,推力轴承解析以及抽水蓄能电站发电电动机选型设计参数分析。
关键词:抽水蓄能;电站发电电动机;特点;选型设计引言随着近年来我国经济的快速发展,各行各业对于电力的需求也日益增加。
基于我国水力资源的分布以及相应气候、地理条件的特点,抽水蓄能电站因其运行方式灵活多样、工况环境转换多、响应速度快等特定而得到较快的发展,其对于确保我国工业和居民的用电需求起到了重要的保障作用。
而发电电动机的正确选型设计对于确保抽水蓄能电站的正常运行也起到了十分关键的作用。
1抽水蓄能电站发电电动机相关内容概述(1)抽水蓄能电站的工作原理是指其利用电力负荷低谷时的电能将水抽至上水库,而在电力负荷高峰期再放水至下水库发电的方式。
其提高了电网的综合利用效率,同时对于电网系统的稳压和周波起到了重要的作用,是一种新型的电站运行模式。
抽水蓄能电站是目前电力系统中经济效益最高、使用寿命周期最长、装机容量大、运行稳定可靠的储能装置。
它对于我国智能电网的发展水平也起到了关键的支撑作用。
(2)抽水蓄能电站类型多样,目前已由以往侧重于用电负荷中心的初级阶段发展到综合能源基地、送出和落地端多方协同发展的新局面。
常见的抽水蓄能电站按照有无天然径流可分为纯抽水蓄能电站和混合式抽水蓄能电站;按照水库调节性能可分为季、周、日调节抽水蓄能电站。
(3)作为抽水蓄能电站中的核心设备之一,发电电动机起到了关键性的作用,其既可当作发电机使用,又能当作电动机使用。
常见的发电电动机按照其主轴位置可分为立式和卧式两种。
(4)发电电动机的选型设计主要考虑三个方面的因素:其一,电力系统条件。
主要评估参数有电抗、启动功率、电压降、稳定性、工况转换次数、符合频率控制等;其二,电机设计要求。
主要评估参数有电压等级、绝缘等级、允许温升、设计尺寸限制等;其三,水力机械条件。
天堂抽水蓄能电厂发电电动机设计特点及运行情况
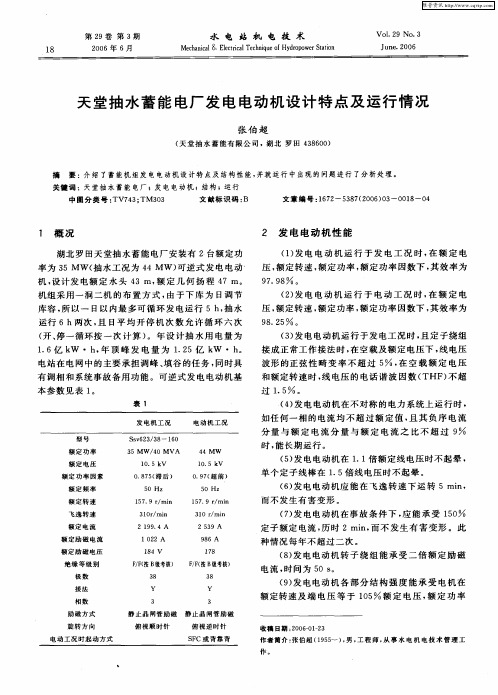
2 发 电 电 动 机 性 能
( ) 电 电动 机 运 行 于 发 电 工 况 时 , 额 定 电 1发 在
~
压, 额定 转速 , 定功 率 , 定功 率 因数 下 , 额 额 其效 率为
9 .9 。 7 8
机组 采用 一洞 二机 的布 置 方 式 , 由于 下 库 为 日调 节
库 容 , 以一 日以内最 多 可循 环 发 电运 行 5h 抽 水 所 , 运行 6h两次 , 日平 均 开停 机 次 数 允 许 循 环 六 次 且 ( 、 开 停一 循环 按 一次 计 算 ) 。年 设 计 抽 水用 电量 为 1 6亿 k ・h 年 顶 峰 发 电量 为 1 2 . w , . 5亿 k ・h W 。 电站 在 电网 中的主要 承 担调 峰 、 谷 的任务 , 填 同时具 有 调相 和系 统事 故备 用功 能 。可逆 式发 电电动机 基 本 参数 见表 1 。
9 .2 。 8 5
( ) 电电动 机运 行于 发 电工况 时 , 定 子绕 组 3发 且 接 成 正常工 作 接法 时 , 在空 载及 额定 电压 下 , 电压 线 波形 的正 弦性 畸 变 率不 超 过 5 , 空 载 额 定 电 压 在 和额定 转速 时 , 电压 的 电话谐 波 因数 ( 线 THF) 超 不
(0 正 常 开 、 机 时 , 1) 停 应使 用 高 压 油 减 载装 置 ,
允 许在 高压 油减 载 装 置 故 障 时 , 投 入 高压 油 减 载 不
装 置而 开 、 机 。 停 ( 1 发 电机组 设 有机 械和 电气 两套 制 动停机 系 1)
收 稿 日期 :0 6O — 3 2 0 一 12
电动 工 况 时 起 动 方 式
作 者 简 介 : 伯 超 ( 9 5 ) 男 , 程 师 , 事 水 电 机 电 技 术 管 理 工 张 15 一 , 工 从 作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
抽水蓄能电站发电电动机的特点及选型设计分析水力发电第36卷第7期2010年7月抽水蓄能电站发电电动机的特点及选型设计分析徐立佳(中国水电顾问集团中南勘测设计研究院,湖南长沙410014)摘要:对发电电动机的特点,额定容量,功率因数,额定转速和电压,电压调压范围以及结构型式,冷却方式,起动和制动方式等方面进行了较全面的总结和分析.并介绍了黑麋峰和白莲河抽水蓄能电站发电电动机的参数,可供参考.关键词:发电电动机;参数;结构;制动;起动CharacteristicsandSelectionAnalysisofGenerator-motorofPumped-storagePowerStatio nXuLijia(HydroChinaZhongnanEngineeringCorporation,ChangshaHunan410014) Abstract:Thecharacteristics,theselectionofratedcapacity,powerfactor,ratedspeedandvol tageandvoltageregulatorrange,thestructuraltype,thecoolingmethodandthestartingandbrakingmethodsofgenerator-mot orwereanalyzedcomprehensively.Theparametersofgenerator-motorsforHeimifengandBailianhepumped—storagepowerstationswereintroducedherein.KeyWords:generator-motor;parameter;structure;brake;starting中图分类号:TM341;TV743文献标识码:A文章编号:0559—9342(2010)07—0060—030概述抽水蓄能电站由于具有工况转换多,运行方式灵活,反应速度快等优点,近年来在国内得到了相当规模的发展.抽水蓄能机组,无论设计条件还是结构形式都比常规机组复杂的多.白莲河和黑糜峰抽水蓄能电站均安装4台单机容量300Mw的可逆式机组,白莲河抽水蓄能电站位于湖北省黄冈市罗-田县,机组由法国ALSTOM公司中标;黑麋峰抽水蓄能电站位于湖南省长沙市望城县,机组由东方电机股份有限公司供货,ALSTOM公司提供技术支持, 两工程的首台机组都于2009年投运.本文主要根据抽水蓄能机组的特点对发电电动机选型设计和参数的选择进行了总结和分析,希望能为今后大中型抽水蓄能电站的建设提供一些参考.1发电电动机的特点(1)抽水蓄能机组由于在电力系统中承担调峰,填谷,调频,调相及紧急事故备用任务,起停和工况转换频繁,一般每天至少要起停2次,白莲河和黑麋峰抽水蓄能电站设计每天起停10次.发电电动机需适应频繁变化的运行条件.(2)抽水蓄能机组在抽水和发电两种工况的转向相反.发电电动机需按双向运转设计.要求其通风冷却系统和轴承结构都应能适应双向旋转. (3)在抽水]_况下,发电电动机作为同步电动机运行时,为使起动电流不至过大,减少对电网的扰动,必须有专门的起动措施.(4)抽水蓄能机组转速高,发电电动机尺寸小,磁极对数少,每极容量大,通风冷却比常规水轮发电机难度大2发电电动机参数选择2.1额定容量发电电动机的容量包括发电机容量和电动机轴功率两个参数,其额定容量的选择应考虑:发电工收稿日期:2010—05—18作者简介:徐立佳(1965一),女,湖南益阳人,教授级高工,副总丁程师.主要从事水电丁程设计,咨询和技术管理丁作.第36卷第7期徐立佳:抽水蓄能电站发电电动机的特点及选型设计分析况与水轮机工况在额定水头下的额定出力匹配.电动工况的输出轴功率与水泵工况在最小扬程下的最大输入轴功率匹配电动机的容量选择在其最大输入轴功率不小于水泵工况最小扬程时的最大入力要求的前提下电动机视在功率尽量与发电机视在功率相等,以获得最高的综合效益.白莲河抽水蓄能电站发电与抽水工况的额定容量分别为334MV?A和325MW:黑麋峰抽水蓄能电站发电工况为334MV?A,抽水工况为320MW(最大325MW).2.2功率因数(cos)发电电动机需确定发电与抽水两种_T况的功率因数.作为发电机运行时,机组是作为电力系统的电源,需向系统输L叶J无功,太高的功率因数会降低系统的稳定性.因此功率因数的选择要求略低一点.但当发电电动机有功功率一定时,选用较低的额定功率因数,发电电动机视在功率增大,尺寸和材料消耗相应增加,造价增大.随着电网的加强,以及快速励磁的采用大大提高了电力系统稳定性,因而使得发电电动机功率因数有提高的趋势,一般取0.9~0.95.作为电动机运行时,机组是作为电力系统的负荷,对无功的需求不是很大,通常只考虑补偿电站内主变压器的无功损耗,额定功率因数可取得高一点,这样可减少抽水工况下电机的设计容量, 一般取0.975~1.0.白莲河和黑麋峰抽水蓄能电站的发电电动机发电工况cos~b的取值为0.9.抽水工况cosch的取值为0.9752.3额定转速发电电动机的额定转速主要取决于水泵水轮机额定转速,与水泵水轮机工作水头,转轮型式,转轮直径,流量,效率等参数水平有关;同时要考虑发电电动机本身的额定电压,额定功率因数,定子绕组的并联支路数,合理的槽电流以及发电机的冷却方式. 对于一些特定转速,采用对称绕组设计时可选的并联支路数范围窄,在一定容量下.较难选取合适的槽电流.若槽电流太小,电机有效材料利用率低,不经济;槽电流太大,又会使损耗增加,绝缘温差增大.而采用非对称绕组设计,设计制造难度较大,不利于设备招标.为了求得最佳槽电流,可采用适当降低或提高额定电压的方法来解决,尽量采用对称绕组设计.综合比较白莲河发电电动机的额定转速选为250r/mim,黑麋峰发电电动机为300r/mim.2.4额定电压及调压范围(1)额定电压.额定电压反映发电电动机的绝缘水平,是一个综合性参数.它与发电电动机的容量,冷却方式,合理的槽电流和额定转速等有关,同时还必须考虑发电电动机回路电压配电装置,离相封闭母线和主变压器等设备的选型.一般电机容量越大,额定电压相应越高,这样可减少铜的消耗.最合适的额定电压大多与定子绕组的并联支路数有关,在电机电磁负荷取值合理的条件下,额定电压越低,绝缘材料和有效材料越省.但降低额定电压会使电机用铜量增加.综合技术经济比较后.白莲河发电电动机的额定电压选为l5.75kV,黑麋峰发电电动机的为18kV.(2)调压范围.抽水蓄能电站既是送电端又是受电端,工况变换频繁,潮流变化大,一般电压范围变化较大,可设置主变压器有载调压装置或采用机组调压.由于抽水蓄能电站主变压器一般布置在地下,运行条件差,有载调压开关故障率高,是变压器安全运行的一个薄弱环节.因此,目前趋向采用机组调压.发电电动机调压范围一般为额定电压的±5%.运行电压变化范围可提高到额定电压值的±7.5%或±10%.白莲河机组电压调节范围为±6. 5%,黑麋峰机组为±5%,主变均未设置有载调压装置.3发电电动机的结构3.1结构型式发电电动机型式按推力轴承布置位置分为悬式和伞式两种结构.一般认为,悬式结构的机械稳定性比伞式好.伞式结构总高度比悬式低,从而可降低厂房高度.通常,中低速大容量机组采用伞式,转速较高的则采用悬式结构.对于常规机组,一般用D_/Ln(D;为定子铁心内径,为定子铁心长度,凡为机组额定转速)来区分,大至有如下趋势:当D.rt≤0.025时,多采用悬式结构;当DILnN>0.025时,采用半伞式结构; 当D_IL≥0.05时采用全伞式结构.但抽水蓄能机组发电电动机的结构型式与常规电站设计不同.大多数大容量发电电动机的JLrl,都小于0.025,而都采用了半伞式结构.白莲河机组D.为7500mm,L为2262mm,n为250r/mim,黑麇峰机组D.为6500mm,L为2290mm,N为300r/mim,DJLinN均小于0.025.均采用了半伞式结构,推力轴承和下导轴承布置在下机架上.国外制造厂家也认为:解决运行稳定问题,缩短机组主轴长度是关键,悬式机组轴系长对轴的摆度和振动都不利.因此.在国外绝大部分大容量,高转速发电电动机也都趋向采用半伞式结构.3.2定,转子由于抽水蓄能机组转速高,定子铁心长,需保W~~erPowerV o1.36.No.7囫证线棒沿铁心长度的温度分布均匀.又由于起停频繁.内部温度变化剧烈,要考虑定子线棒产生的温度应力和热变形.发电电动机转子的阻尼绕组的设计与机组的起动方式有关.当采用异步起动时需加强转子磁极和阻尼绕组结构,选用高电阻的阻尼绕组或实心磁极以产生足够大的起动力矩并吸收起动过程中产生的大量热量.3.3推力轴承及其冷却方式为适应双向旋转,推力瓦只能对称支撑,一般油膜较薄,润滑性能较常规机组差.因此,抽水蓄能机组一般设有高压油顶起装置,以利于起动过程中形成油膜.减少电动工况时的摩擦力.推力轴承油的冷却通过油一水冷却器实现,按循环冷却方式分为内循环和外循环.外循环有外加泵和自身泵两种形式,自身泵又分为镜板泵和导瓦泵两种.外循环方式有利于推力轴承和冷却器检修,因此只要空间允许.应优先采用外循环方式.白莲河和黑麋峰机组推力轴承和下导轴承合一布置,推力轴承采用导瓦自身泵外循环方式.3.4通风冷却方式目前.抽水蓄能机组一般采用无外加风机的转子磁轭径向通风方式或带外加风机的强迫循环通风方式.一般优先采用无外加风机的径向通风方式.白莲河和黑麋峰机组均采用了无外加风机的转子磁轭径向通风方式.发电电动机的冷却方式有全空冷,半水冷(定子水冷)和蒸发冷却三种.蒸发冷却,目前还缺少用于发电电动机的工程经验.全空冷和半水冷则技术较成熟,特别是全空冷方式应用最广泛,而目前发电电动机的容量,转速范围均能满足全空冷机组的要求,因此没有必要采用半水冷方式或蒸发冷却方式(上接第54页)最低水位91.01TI,尾水洞出口顶板高程79.0m.均高于72.0rn高程排水廊道.为防止深井泵在异常低扬程下运行而烧毁电机,排水开始时.应密切关注检修集水井内的水位,利用盘形阀控制进入检修排水廊道的水量,确保检修集水井内的水位保持在其顶板以下.4发电电动机的起动和制动方式4.1起动方式起动方式常用的主要有异步起动,同步起动和静止变频起动几种起动方式.异步起动和同步起动受电力系统和机组本身制造的制约,而静止变频起动则不受限制,因此静止变频起动得到了越来越广泛的应用目前,国内外在建的大型抽水蓄能电站几乎都采用了静止变频起动为主,背靠背起动作为备用的起动方式.白莲河和黑麋峰机组均为全厂设一套静止变频起动装置作为水泵工况的主要起动方式,背靠背起动作为备用起动方式.4.2制动方式制动停机是起停频繁机组的关键问题之一.机械制动力矩与转速成正比,在过高转速时投制动会造成制动块剧烈磨损和振动,而低转速时制动力矩低,一般在额定转速的20%左右投机械制动.从停机过程看,机械制动停机时间长,对要求能快速从一种工况转换到另一种工况的抽水蓄能机组不理想.与机械制动相比,电气制动制动力矩大,不存在制动块磨损大及污染问题,可以在任何转速下投入,而且电气制动力矩很大范围内与转速成反比,在低转速区制动力矩反而增大.因此大型抽水蓄能机组都配备有电气制动,电气制动和机械制动相结合以加快停机.一般在较高转速(额定转速的50%)下先投电气制动,再在较低转速(额定转速的5%~10%)下投机械制动.白莲河和黑麋峰机组均采用了电气和机械联合制动的停机方式,必要时机械制动可单独使用.参考文献:[1]梅祖颜.抽水蓄能发电技术[M]北京:清华大学出版社,1988. (责任编辑刘书秋)渗漏与检修排水分开设置,水经地下洞室的自流排水廊道排至白莲河水库下游;检修排水采用间接排水系统,集水井通气孔经自流排水廊道与大气自由连通.既满足技术要求,确保地下厂房的安全,又能节省投资和运行维护费用.该工程排水系统的设计可为大埋深地下厂房排水系统设计提供参考和借鉴.7结语参考文献:排水是地下厂房工程最重要的环节之一,抽水蓄能电站的地下厂房工程埋深较大,排水系统的安全性尤为重要.白莲河抽水蓄能电站地下厂房系统固WaterPowerV o1.36.No.7[1]陆佑楣,潘家铮.抽水蓄能电站EM].北京:水利电力出版社,1992.[2]梅祖彦.抽水蓄能发电技术[M].北京:机械工业出版社,2000. (责任编辑常青)。