matlab课后习题答案第四章
matlab课后习题答案第四章
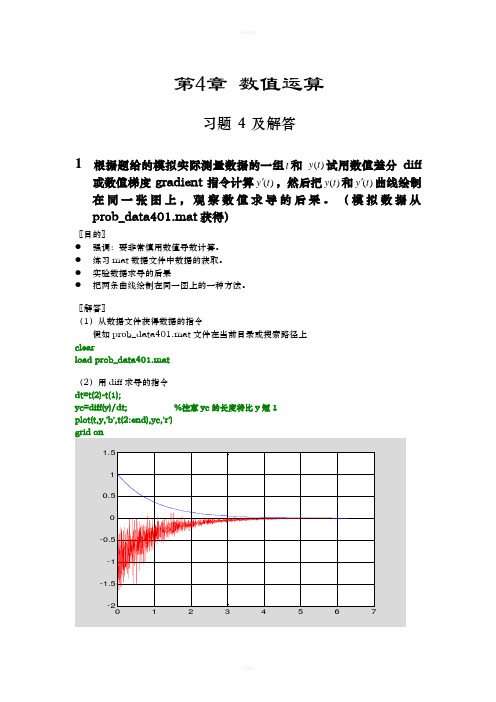
第4章数值运算习题 4 及解答1 根据题给的模拟实际测量数据的一组t和)(t y试用数值差分diff或数值梯度gradient指令计算)(t y',然后把)(t y和)(t y'曲线绘制在同一张图上,观察数值求导的后果。
(模拟数据从prob_data401.mat获得)〖目的〗●强调:要非常慎用数值导数计算。
●练习mat数据文件中数据的获取。
●实验数据求导的后果●把两条曲线绘制在同一图上的一种方法。
〖解答〗(1)从数据文件获得数据的指令假如prob_data401.mat文件在当前目录或搜索路径上clearload prob_data401.mat(2)用diff求导的指令dt=t(2)-t(1);yc=diff(y)/dt; %注意yc的长度将比y短1plot(t,y,'b',t(2:end),yc,'r')(3)用gradent 求导的指令(图形与上相似)dt=t(2)-t(1);yc=gradient(y)/dt;plot(t,y,'b',t,yc,'r')grid on〖说明〗● 不到万不得已,不要进行数值求导。
● 假若一定要计算数值导数,自变量增量dt 要取得比原有数据相对误差高1、2个量级以上。
● 求导会使数据中原有的噪声放大。
2 采用数值计算方法,画出dt tt x y x ⎰=0sin )(在]10 ,0[区间曲线,并计算)5.4(y 。
〖提示〗● 指定区间内的积分函数可用cumtrapz 指令给出。
● )5.4(y 在计算要求不太高的地方可用find 指令算得。
〖目的〗● 指定区间内的积分函数的数值计算法和cumtrapz 指令。
● find 指令的应用。
〖解答〗dt=1e-4;t=0:dt:10;t=t+(t==0)*eps;f=sin(t)./t;s=cumtrapz(f)*dt;plot(t,s,'LineWidth',3)ii=find(t==4.5);s45=s(ii)s45 =1.65413 求函数x ex f 3sin )(=的数值积分⎰=π0 )(dx x f s ,并请采用符号计算尝试复算。
(完整版)汽车理论课后作业答案MATLAB
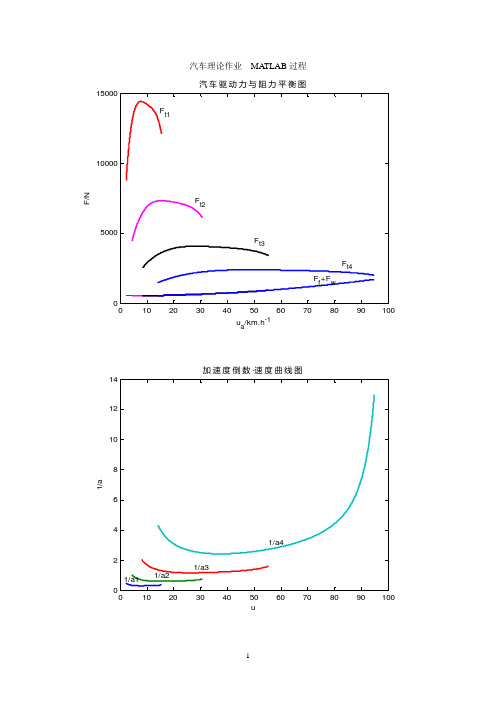
汽车理论作业 MA TLAB 过程010203040506070809010050001000015000汽车驱动力与阻力平衡图u a /km.h -1F /N10203040506070809010002468101214加速度倒数-速度曲线图u1/a0102030405060708090100102030405060u/(km/h)P /k W汽车功率平衡图10203040506070809010012141618202224最高档等速百公里油耗曲线Ua/(km/h)Q s /L2324252627282912131415161718燃油积极性-加速时间曲线燃油经济性(qs/L)动力性--原地起步加速时间 (s t /s )源程序:《第一章》m=3880; g=9.8; r=0.367; x=0.85; f=0.013; io=5.83; CdA=2.77; If=0.218; Iw1=1.798; Iw2=3.598; Iw=Iw1+Iw2;ig=[6.09 3.09 1.71 1.00]; %变速器传动比 L=3.2; a=1.947; hg=0.9; n=600:1:4000;T=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; Ft1=T*ig(1)*io*x/r;%计算各档对应转速下的驱动力Ft2=T*ig(2)*io*x/r;Ft3=T*ig(3)*io*x/r;Ft4=T*ig(4)*io*x/r;u1=0.377*r*n/(io*ig(1));u2=0.377*r*n/(io*ig(2));u3=0.377*r*n/(io*ig(3));u4=0.377*r*n/(io*ig(4));u=0:130/3400:130;F1=m*g*f+CdA*u1.^2/21.15;%计算各档对应转速下的驱动阻力F2=m*g*f+CdA*u2.^2/21.15;F3=m*g*f+CdA*u3.^2/21.15;F4=m*g*f+CdA*u4.^2/21.15;figure(1);plot(u1,Ft1,'-r',u2,Ft2,'-m',u3,Ft3,'-k',u4,Ft4,'-b',u1,F1,'-r',u2,F2,'-m',u3,F3,'-k',u4,F4,'-b','LineWidth',2)title('汽车驱动力与阻力平衡图');xlabel('u_{a}/km.h^{-1}')ylabel('F/N')gtext('F_{t1}')gtext('F_{t2}')gtext('F_{t3}')gtext('F_{t4}')gtext('F_{f}+F_{w}')%由汽车驱动力与阻力平衡图知,他们无交点,u4在最大转速时达到最大umax=u4(3401)Ft1max=max(Ft1);imax=(Ft1max-m*g*f)/(m*g)disp('假设是后轮驱动');C=imax/(a/L+hg*imax/L) % 附着率delta1=1+(Iw1+Iw2)/(m*r^2)+If*ig(1)*r^2*io^2*x/(m*r^2);delta2=1+(Iw1+Iw2)/(m*r^2)+If*ig(2)*r^2*io^2*x/(m*r^2);delta3=1+(Iw1+Iw2)/(m*r^2)+If*ig(3)*r^2*io^2*x/(m*r^2);delta4=1+(Iw1+Iw2)/(m*r^2)+If*ig(4)*r^2*io^2*x/(m*r^2);a1=(Ft1-F1)/(delta1*m); %加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);h1=1./a1; %加速度倒数h2=1./a2;h3=1./a3;h4=1./a4;figure(2);plot(u1,h1,u2,h2,u3,h3,u4,h4,'LineWidth',2); title('加速度倒数-速度曲线图');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')%由加速度倒数-速度曲线图可知u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=70;x1=[];x2=[];x3=[];x4=[];y=3401;for i=1:3401;if u3(i)<=u3min;x1=[i];endendq1=max(x1);ua3=u3(q1:y);a3=h3(q1:y);for i=1:3401;if u4(i)<=u4min;x2=[i];elseif u4(i)<=u4max;x3=[i];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=h4(q2:q3);s1=trapz(h2,u2 ); %二挡运行时间s2=trapz(ua3,a3);s3=trapz(ua4,a4);s=[s1 s2 s3];disp('积分得')t=sum(s)*1000/3600 %总时间《第二章》Pe1=Ft1.*u1./3600;%计算各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;P1=F1.*u1./(3600*x);%计算各档对应的各个车速下的行驶功率P2=F2.*u2./ (3600*x);P3=F3.*u3./ (3600*x);P4=F4.*u4./ (3600*x);figure(3);plot(u1,Pe1,'-r',u2,Pe2,'-m',u3,Pe3,'-k',u4,Pe4,'-b',u1,P1,'k',u2,P2,'k',u3,P3,'k', u4,P4,'k','linewidth',2);gtext('Pe1')gtext('Pe2')gtext('Pe3')gtext('Pe4')xlabel('u/(km/h)');ylabel('P/kW');title('汽车功率平衡图');n=[815 1207 1614 2012 2603 3006 3403 3804];Ua=[];Ua=0.377*r*n./(io*ig(4))ft=[];ft=m*g*f+(2.77/21.15)*Ua.^2;%计算各转速对应的各个车速下的行驶阻力Pe(1)=ft(1).*Ua(1)./(3600*x);%计算各转速对应的各个车速下的行驶阻力功率Pe(2)=ft(2).*Ua(2)./(3600*x);Pe(3)=ft(3).*Ua(3)./(3600*x);Pe(4)=ft(4).*Ua(4)./(3600*x);Pe(5)=ft(5).*Ua(5)./(3600*x);Pe(6)=ft(6).*Ua(6)./(3600*x);Pe(7)=ft(7).*Ua(7)./(3600*x);Pe(8)=ft(8).*Ua(8)./(3600*x)B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291];B2=[72.739 36.657 14.525 7.0035 4.4763 2.8593 2.9788 0.7113];B3=[-5.8629 -2.0533 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230-0.000038568];b1=(B0(1))+(B1(1)*Pe(1))+(B2(1)*Pe(1)^2)+(B3(1)*Pe(1)^3)+(B4(1)*Pe(1)^4);b2=(B0(2))+(B1(2)*Pe(2))+(B2(2)*Pe(2)^2)+(B3(2)*Pe(2)^3)+(B4(2)*Pe(2)^4);b3=(B0(3))+(B1(3)*Pe(3))+(B2(3)*Pe(3)^2)+(B3(3)*Pe(3)^3)+(B4(3)*Pe(3)^4);b4=(B0(4))+(B1(4)*Pe(4))+(B2(4)*Pe(4)^2)+(B3(4)*Pe(4)^3)+(B4(4)*Pe(4)^4);b5=(B0(5))+(B1(5)*Pe(5))+(B2(5)*Pe(5)^2)+(B3(5)*Pe(5)^3)+(B4(5)*Pe(5)^4);b6=(B0(6))+(B1(6)*Pe(6))+(B2(6)*Pe(6)^2)+(B3(6)*Pe(6)^3)+(B4(6)*Pe(6)^4);b7=(B0(7))+(B1(7)*Pe(7))+(B2(7)*Pe(7)^2)+(B3(7)*Pe(7)^3)+(B4(7)*Pe(7)^4);b8=(B0(8))+(B1(8)*Pe(8))+(B2(8)*Pe(8)^2)+(B3(8)*Pe(8)^3)+(B4(8)*Pe(8)^4);p=0.7;Qs=[];Qs(1)=(Pe(1)*b1)/(1.02*Ua(1).*p*g);Qs(2)=(Pe(2)*b2)/(1.02*Ua(2).*p*g);Qs(3)=(Pe(3)*b3)/(1.02*Ua(3).*p*g);Qs(4)=(Pe(4)*b4)/(1.02*Ua(4).*p*g);Qs(5)=(Pe(5)*b5)/(1.02*Ua(5).*p*g);Qs(6)=(Pe(6)*b6)/(1.02*Ua(6).*p*g);Qs(7)=(Pe(7)*b7)/(1.02*Ua(7).*p*g);Qs(8)=(Pe(8)*b8)/(1.02*Ua(8).*p*g);M=polyfit(Ua,Qs,2);UA=0.377*r*600/(ig(4)*io):1:0.377*r*4000/(ig(4)*io);%UA表示车速QS=polyval(M,UA);%QS表示油耗figure(4);plot(UA,QS,'linewidth',2);title('最高档等速百公里油耗曲线');xlabel('Ua/(km/h)');ylabel('Qs/L');《第三章》io=[5.17 5.43 5.83 6.17 6.33];Va=0.377*r*n(7)./(io.*ig(4));Ps=46.9366;disp('假设以最高档,较高转速(n取3401 ),最经济负荷(即90%负荷大约 46.9366Kw)行驶时油耗')qs=[];qs(1)=(Ps*b7)/(1.02*Va(1).*p*g);qs(2)=(Ps*b7)/(1.02*Va(2).*p*g);qs(3)=(Ps*b7)/(1.02*Va(3).*p*g);qs(4)=(Ps*b7)/(1.02*Va(4).*p*g);qs(5)=(Ps*b7)/(1.02*Va(5).*p*g);st=[ 17.5813 16.2121 14.5126 13.3775 12.9185];%加速时间:(这里以最高档〈四档〉、速度由0加速到94.93Km/h 的时间)因与题1.3第三问求法相同,这里不在累述,可直接有计算机求得:figure(5);plot(qs,st,'+','linewidth',2)hold on plot(qs,st,); gtext('5.17') gtext('5.43') gtext('5.83') gtext('6.17') gtext('6.33')title('燃油积极性-加速时间曲线'); xlabel('燃油经济性(qs/L)');ylabel('动力性--原地起步加速时间 (st/s)');《第四章》 4-31)前轴利用附着系数为:gf zh b zL +=βϕ后轴利用附着系数为: ()gr zh a zL --=βϕ1空载时:g h b L -=βϕ0=413.0845.085.138.095.3-=-⨯所以0ϕϕ>空载时后轮总是先抱死。
电机与拖动基础及MATLAB仿真习题答案(第四章)

4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=%,求电动机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率 解:(1)额定电流(2)输入功率4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。
试求:(1)绕组各节距;(2)并联支路数。
解:(1)第一节距5424222y 1=-=±=εp z ,为短距绕组。
单叠绕组的合成节距及换向器节距均为1,即1y ==k y第二节距415y 12=-=-=y y(2)并联支路数等于磁极数,为4。
4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。
解: 电枢绕组为单叠绕组时,并联支路对数a=p=3,电磁转矩 m N I a pN T a ⋅=⨯⨯⨯⨯⨯=Φ=38.1310021.0314.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍A U P I N N N N 79.207875.022010403=⨯⨯==ηkWI U P N N 71.4579.2072201=⨯=⨯=A U P I N N N 5.35623010823=⨯==KW P P N 11.911==η为m N ⋅,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致的,保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。
matlab课后习题答案(1-9章)
1 数字1.5e2,1.5e3 中的哪个与1500相同吗?1.5e32 请指出如下5个变量名中,哪些是合法的?abcd-2xyz_33chan a 变量ABCDefgh 2、5是合法的。
3 在MATLAB 环境中,比1大的最小数是多少? 1+eps4 设 a = -8 , 运行以下三条指令,问运行结果相同吗?为什么?w1=a^(2/3) w2=(a^2)^(1/3) w3=(a^(1/3))^2w1 = -2.0000 + 3.4641i ;w2 = 4.0000 ;w3 =-2.0000 + 3.4641i 5 指令clear, clf, clc 各有什么用处?clear 清除工作空间中所有的变量。
clf 清除当前图形。
clc 清除命令窗口中所有显示。
第二章1 说出以下四条指令产生的结果各属于哪种数据类型,是“双精度”对象,还是“符号”符号对象?3/7+0.1双; sym(3/7+0.1)符; sym('3/7+0.1') 符;; vpa(sym(3/7+0.1)) 符;2 在不加专门指定的情况下,以下符号表达式中的哪一个变量被认为是自由符号变量. sym('sin(w*t)'),sym('a*exp(-X)'),sym('z*exp(j*th)') symvar(sym('sin(w*t)'),1) w a z3 (1)试写出求三阶方程05.443=-x 正实根的程序。
注意:只要正实根,不要出现其他根。
(2)试求二阶方程022=+-a ax x 在0>a 时的根。
(1)reset(symengine)syms x positive solve(x^3-44.5) ans =(2^(2/3)*89^(1/3))/2(2)求五阶方程022=+-a ax x 的实根 syms a positive %注意:关于x 的假设没有去除 solve(x^2-a*x+a^2)Warning: Explicit solution could not be found. > In solve at 83 ans =[ empty sym ]syms x clear syms a positivesolve(x^2-a*x+a^2) ans =a/2 + (3^(1/2)*a*i)/2 a/2 - (3^(1/2)*a*i)/24 观察一个数(在此用@记述)在以下四条不同指令作用下的异同。
MATLAB 习题 4

MATLAB 习题第1章MATLAB R2010环境2、在命令窗口中输入:>>a=2.5>>b=5*6>>c=[a b]写出在命令窗口中的运行结果4、用“Format”命令设置数据输出格式,(format long 或format long g)将pi显示为3.14159265358979,(formatshort e)将pi显示为3.1416e+0006、在工作空间查看变量的变量名、数据结构、类型、大小和字节数,打开数组编辑器窗口修改第2题的变量c元素。
修改变量c元素:8、输入变量a=5.3,b=[1 2;3 4],在工作空间中使用who、whos、exist和clear命令,并用save 命令将变量存入“F:\exe0101.mat”文件。
A=[1,2;3,4];inv(A)rank(A)det(A)A^3[v,d]=eig(A)结果:>>ans =-2.0000 1.00001.5000 -0.5000ans =2ans =-2ans =37 5481 118v =-0.8246 -0.41600.5658 -0.9094d =-0.3723 00 5.3723 >>命令窗口图片:接上一张图片:工作空间窗口图片:第2章MATLAB数值计算1、选择和填空(1)下列变量名中的(A)是合法变量。
A. char-1,i,jB. x*y,a.1C. x\y,a1234D. end,1bcx(2)已知x为1个向量,计算其正弦函数的运算为(C)。
A. SIN(X)B. SIN(x)C. sin(x)D. sinx(3) 已知x为1个向量,计算ln(x)运算为(B)。
A. ln(x)B. log(x)C. Ln(x)D.log10(x)(4) 若a=2.4,使用取整函数得出3,则该取整函数名为(C)。
A. fixB. roundC. ceilD. floor(5) 已知a=0:4, b=1:5, 下面的运算表达式出错的为(D)。
第4章 MATLAB程序流程控制_习题答案
第4章 MATLAB程序流程控制习题4一、选择题1.下列关于脚本文件和函数文件的描述中不正确的是()。
AA.函数文件可以在命令行窗口直接运行B.去掉函数文件第一行的定义行可转变成脚本文件C.脚本文件可以调用函数文件D.函数文件中的第一行必须以function开始2.下列程序的输出结果是()。
Dy=10;if y==10y=20;elseif y>0y=30enddisp(y)A.1 B.30 C.10 D.203.有以下语句:a=eye(5);for n=a(2:end,:)for循环的循环次数是()。
CA.3 B.4 C.5 D.104.设有程序段k=10;while kk=k-1end则下面描述中正确的是()。
AA.while循环执行10次B.循环是无限循环C.循环体语句一次也不执行D.循环体语句执行一次5.有以下程序段:x=reshape(1:12,3,4);m=0;n=0;for k=1:4if x(:,k)<=6m=m+1;elsen=n+1;endend则m和n的值分别是()。
CA.6 6 B.2 1 C.2 2 D.1 26.调用函数时,如果函数文件名与函数名不一致,则使用()。
A A.函数文件名B.函数名C.函数文件名或函数名均可D.@函数名7.如果有函数声明行为“function [x,y,z]=f1(a,b,c)”,则下述函数调用格式中错误的是()。
BA.x=f1(a,b,c) B.[x,y,z,w]=f1(a,b,c)C.[x,b,z]=f1(a,y,c) D.[a,b]=f1(x,y,z)8.执行语句“fn=@(x) 10*x;”,则fn是()。
AA.匿名函数B.函数句柄C.字符串D.普通函数9.执行下列语句后,变量A的值是()。
D>> f=@(x,y) log(exp(x+y));>> A=f(22,3);A.22,3B.22 C.3 D.2510.程序调试时用于设置断点的函数是()。
matlab第四章课后答案

%Exerc ise 1(1)r oots([1 11])%Exer cise1(2)roots([3 0 -4 0 2 -1])%Exerc ise 1(3)p=zero s(1,24);p([1 17 1822])=[5 -6 8 -5];ro ots(p)%E xerci se 1(4)p1=[2 3];p2=conv(p1,p1);p3=co nv(p1, p2);p3(end)=p3(en d)-4; %原p3最后一个分量-4r oots(p3)%Exer cise2fun=inli ne('x*log(sqrt(x^2-1)+x)-sqrt(x^2-1)-0.5*x');fzer o(fun,2)%Exer cise3fun=inli ne('x^4-2^x');fplot(fun,[-2 2]);gr id on;fze ro(fu n,-1),fzer o(fun,1),f minbn d(fun,0.5,1.5)%Exe rcise 4fu n=inl ine('x*sin(1/x)','x');fp lot(f un, [-0.10.1]);x=z eros(1,10);fori=1:10, x(i)=fz ero(f un,(i-0.5)*0.01);end;x=[x,-x]%Ex ercis e 5f un=in line('[9*x(1)^2+36*x(2)^2+4*x(3)^2-36;x(1)^2-2*x(2)^2-20*x(3);16*x(1)-x(1)^3-2*x(2)^2-16*x(3)^2]','x');[a,b,c]=fso lve(f un,[0 0 0])%E xerci se 6fun=@(x)[x(1)-0.7*si n(x(1))-0.2*cos(x(2)),x(2)-0.7*cos(x(1))+0.2*sin(x(2))]; [a,b,c]=fsolv e(fun,[0.5 0.5])%E xerci se 7clear; clo se; t=0:p i/100:2*pi;x1=2+sqr t(5)*cos(t); y1=3-2*x1+sq rt(5)*sin(t);x2=3+s qrt(2)*cos(t);y2=6*sin(t);pl ot(x1,y1,x2,y2); gri d on; %作图发现4个解的大致位置,然后分别求解y1=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.5,2])y2=fsolv e('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[1.8,-2])y3=fsol ve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[3.5,-5])y4=fso lve('[(x(1)-2)^2+(x(2)-3+2*x(1))^2-5,2*(x(1)-3)^2+(x(2)/3)^2-4]',[4,-4])%Exerc ise 8(1)c lear;fun=inlin e('x.^2.*(x.^2-x-2)');fp lot(f un,[-2 2]);grid on;%作图观察x(1)=-2;x(2)=fminb nd(fu n,-1,-0.5);x(4)=fmi nbnd(fun,1,2);fun2=inlin e('-x.^2.*(x.^2-x-2)');x(3)=f minbn d(fun2,-0.5,0.5);x(5)=2feval(fun,x)%答案: 以上x(2)(4)是局部极小,x(1)(3)(5)是局部极大,从最后一句知道x(1)全局最大, x(4)最小。
matlab课后习题答案1到6章

习题二1.如何理解“矩阵是MATLAB最基本的数据对象”答:因为向量可以看成是仅有一行或一列的矩阵,单个数据(标量)可以看成是仅含一个元素的矩阵,故向量和单个数据都可以作为矩阵的特例来处理。
因此,矩阵是MATLAB最基本、最重要的数据对象。
2.设A和B是两个同维同大小的矩阵,问:(1)A*B和A.*B的值是否相等答:不相等。
(2) A./B和B.\A的值是否相等答:相等。
(3)A/B和B\A的值是否相等答:不相等。
(4)A/B和B\A所代表的数学含义是什么答:A/B等效于B的逆右乘A矩阵,即A*inv(B),而B\A等效于B矩阵的逆左乘A矩阵,即inv(B)*A。
3.写出完成下列操作的命令。
(1)将矩阵A第2~5行中第1, 3, 5列元素赋给矩阵B。
答:B=A(2:5,1:2:5);或B=A(2:5,[1 3 5])(2)删除矩阵A的第7号元素。
答:A(7)=[](3)将矩阵A的每个元素值加30。
答:A=A+30;(4)求矩阵A的大小和维数。
答:size(A);ndims(A);(5)将向量t的0元素用机器零来代替。
答:t(find(t==0))=eps;(6)将含有12个元素的向量x转换成34⨯矩阵。
答:reshape(x,3,4);(7)求一个字符串的ASCII码。
答:abs(‘123’); 或double(‘123’);(8)求一个ASCII码所对应的字符。
答:char(49);4.下列命令执行后,L1、L2、L3、L4的值分别是多少A=1:9;B=10-A;...L1=A==B;L2=A<=5;L3=A>3&A<7;L4=find(A>3&A<7);答:L1的值为[0, 0, 0,0, 1, 0, 0, 0, 0]L2的值为[1, 1, 1,1, 1, 0, 0, 0, 0]L3的值为[0, 0, 0,1, 1, 1, 0, 0, 0]L4的值为[4, 5,6]5.已知23100.7780414565532503269.5454 3.14A-⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥-⎣⎦完成下列操作:(1)取出A的前3行构成矩阵B,前两列构成矩阵C,右下角32⨯子矩阵构成矩阵D,B与C的乘积构成矩阵E。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第4章数值运算习题 4 及解答1 根据题给的模拟实际测量数据的一组t和)(t y试用数值差分diff或数值梯度gradient指令计算)(ty'曲线y',然后把)(t y和)(t 绘制在同一图上,观察数值求导的后果。
(模拟数据从prob_data401.mat获得)〖目的〗●强调:要非常慎用数值导数计算。
●练习mat数据文件中数据的获取。
●实验数据求导的后果●把两条曲线绘制在同一图上的一种方法。
〖解答〗(1)从数据文件获得数据的指令假如prob_data401.mat文件在当前目录或搜索路径上clearload prob_data401.mat(2)用diff求导的指令dt=t(2)-t(1);yc=diff(y)/dt; %注意yc的长度将比y短1plot(t,y,'b',t(2:end),yc,'r')(3)用gradent求导的指令(图形与上相似)dt=t(2)-t(1);yc=gradient(y)/dt;plot(t,y,'b',t,yc,'r')grid on〖说明〗● 不到万不得已,不要进行数值求导。
● 假若一定要计算数值导数,自变量增量dt 要取得比原有数据相对误差高1、2个量级以上。
● 求导会使数据中原有的噪声放大。
2 采用数值计算方法,画出dt tt x y x ⎰=0sin )(在]10 ,0[区间曲线,并计算)5.4(y 。
〖提示〗● 指定区间的积分函数可用cumtrapz 指令给出。
● )5.4(y 在计算要求不太高的地方可用find 指令算得。
〖目的〗● 指定区间的积分函数的数值计算法和cumtrapz 指令。
● find 指令的应用。
〖解答〗dt=1e-4;t=0:dt:10;t=t+(t==0)*eps;f=sin(t)./t;s=cumtrapz(f)*dt;plot(t,s,'LineWidth',3)ii=find(t==4.5);s45=s(ii)s45 =3 求函数x e x f 3sin )(=的数值积分⎰=π)(dx x f s ,并请采用符号计算尝试复算。
〖提示〗● 数值积分均可尝试。
● 符号积分的局限性。
〖目的〗● 符号积分的局限性。
〖解答〗dx=pi/2000;x=0:dx:pi;s=trapz(exp(sin(x).^3))*dxs =5.1370符号复算的尝试syms xf=exp(sin(x)^3);ss=int(f,x,0,pi)Warning: Explicit integral could not be found.> In sym.int at 58ss =int(exp(sin(x)^3),x = 0 .. pi)4 用quad 求取dx x e xsin 7.15⎰--ππ的数值积分,并保证积分的绝对精度为910-。
〖目的〗● quadl ,精度可控,计算较快。
● 近似积分指令trapz 获得高精度积分的存和时间代价较高。
〖解答〗%精度可控的数值积分fx=(x)exp(-abs(x)).*abs(sin(x));format longsq=quadl(fx,-10*pi,1.7*pi,1e-7)sq =1.498%近似积分算法x=linspace(-10*pi,1.7*pi,1e7);dx=x(2)-x(1);st=trapz(exp(-abs(x)).*abs(sin(x)))*dxst =1.430%符号积分算法y='exp(-abs(x))*abs(sin(x))'si=vpa(int(y,-10*pi,1.7*pi),16)y =exp(-abs(x))*abs(sin(x))si =1.29115 求函数5.08.12cos 5.1)5(sin )(206.02++-=t t t e t t f t 在区间]5,5[-中的最小值点。
〖目的〗● 理解极值概念的邻域性。
● 如何求最小值。
● 学习运用作图法求极值或最小值。
● 感受符号法的局限性。
〖解答〗(1)采用fminbnd 找极小值点在指令窗中多次运行以下指令,观察在不同数目子区间分割下,进行的极小值搜索。
然后从一系列极小值点中,确定最小值点。
clearft=(t)sin(5*t).^2.*exp(0.06*t.*t)+1.8*abs(t+0.5)-1.5*t.*cos(2*t);disp('计算中,把[ -5,5] 分成若干搜索子区间。
')N=input(' 请输入子区间数 N ,注意使N>=1 ?');%该指令只能在指令窗中运行 t t=linspace(-5,5,N+1);f or k=1:N[tmin(k),fobj(k)]=fminbnd(ft,tt(k),tt(k+1));e nd[fobj,ii]=sort(fobj); %将目标值由小到大排列t min=tmin(ii); %使极小值点做与目标值相应的重新排列fobj,tmin(2)最后确定的最小值点在10,,2,1 =N 的不同分割下,经观察,最后确定出最小值点是 -1.531相应目标值是 -0.545(3)采用作图法近似确定最小值点(另一方法)(A )在指令窗中运行以下指令:clearft=(t)sin(5*t).^2.*exp(0.06*t.*t)+1.8*abs(t+0.5)-1.5*t.*cos(2*t);t=-5:0.001:5;ff=ft(t);plot(t,ff)grid on,shg(B )经观察后,把最小值附近邻域放到足够大,然后运行以下指令,那放大图形被推向前台,与此同时光标变为“十字线”,利用它点击极值点可得到最小值数据[tmin2,fobj2]=ginput(1)tmin2 =-1.975fobj2 =-0.136出现具有相同数值的刻度区域表明已达最小可分辨状态(4)符号法求最小值的尝试syms tfts=sin(5*t)^2*exp(0.06*t*t)-1.5*t*cos(2*t)+1.8*abs(t+0.5);dfdt=diff(fts,t); %求导函数tmin=solve(dfdt,t) %求导函数的零点fobj3=subs(fts,t,tmin) %得到一个具体的极值点tmin =-.0955e-2fobj3 =.3124〖说明〗●最小值是对整个区间而言的,极小值是对邻域而言的。
●在一个区间中寻找最小值点,对不同子区间分割进行多次搜索是必要的。
这样可以避免把极小值点误作为最小值点。
最小值点是从一系列极小值点和边界点的比较中确定的。
●作图法求最小值点,很直观。
假若绘图时,自变量步长取得足够小,那么所求得的最小值点有相当好的精度。
● 符号法在本例中,只求出一个极值点。
其余很多极值点无法秋初,更不可能得到最小值。
6 设0)0(,1)0(,1)(2)(3)(22===+-dtdy y t y dt t dy dt t y d ,用数值法和符号法求5.0)(=t t y 。
〖目的〗● 学习如何把高阶微分方程写成一阶微分方程组。
● ode45解算器的导数函数如何采用匿名函数形式构成。
● 如何从ode45一组数值解点,求指定自变量对应的函数值。
〖解答〗(1)改写高阶微分方程为一阶微分方程组令dtt dy t y t y t y )()(),()(21==,于是据高阶微分方程可写出 ⎪⎩⎪⎨⎧++-==1)(3)(2)()()(21221t y t y dt t dy t y dt t dy(2)运行以下指令求y(t)的数值解format longts=[0,1];y0=[1;0];dydt=(t,y)[y(2);-2*y(1)+3*y(2)+1]; %<4>%匿名函数写成的ode45所需得导数函数[tt,yy]=ode45(dydt,ts,y0);y_05=interp1(tt,yy(:,1),0.5,'spline'), %用一维插值求y(0.5)y_05 =0.127(3)符号法求解syms t;ys=dsolve('D2y-3*Dy+2*y=1','y(0)=1,Dy(0)=0','t')ys_05=subs(ys,t,sym('0.5'))ys =1/2-1/2*exp(2*t)+exp(t)ys_05 =.3780〖说明〗● 第<4>条指令中的导数函数也可采用M 函数文件表达,具体如下。
function S=prob_DyDt(t,y)S=[y(2);-2*y(1)+3*y(2)+1];7 已知矩阵A=magic(8),(1)求该矩阵的“值空间基阵”B ;(2)写出“A 的任何列可用基向量线性表出”的验证程序(提示:利用rref 检验)。
〖目的〗●体验矩阵值空间的基向量组的不唯一性,但它们可以互为线性表出。
●利用rref检验两个矩阵能否互为表出。
〖解答〗(1)A的值空间的三组不同“基”A=magic(8); %采用8阶魔方阵作为实验矩阵[R,ci]=rref(A);B1=A(:,ci) %直接从A中取基向量B2=orth(A) %求A值空间的正交基[V,D]=eig(A);rv=sum(sum(abs(D))>1000*eps); %非零特征值数就是矩阵的秩B3=V(:,1:rv) %取A的非零特征值对应的特征向量作基B1 =64 2 39 55 5417 47 4640 26 2732 34 3541 23 2249 15 148 58 59B2 =-0.3536 0.5401 0.3536-0.3536 -0.3858 -0.3536-0.3536 -0.2315 -0.3536-0.3536 0.0772 0.3536-0.3536 -0.0772 0.3536-0.3536 0.2315 -0.3536-0.3536 0.3858 -0.3536-0.3536 -0.5401 0.3536B3 =0.3536 0.6270 0.39130.3536 -0.4815 -0.24580.3536 -0.3361 -0.10040.3536 0.1906 -0.04510.3536 0.0451 -0.19060.3536 0.1004 0.33610.3536 0.2458 0.48150.3536 -0.3913 -0.6270(2)验证A的任何列可用B1线性表出B1_A=rref([B1,A]) %若B1_A矩阵的下5行全为0,%就表明A可以被B1的3根基向量线性表出B1_A =1 0 0 1 0 0 1 1 0 0 1 0 1 0 0 1 0 3 4 -3 -4 7 0 0 1 0 0 1 -3 -4 4 5 -7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0B2_A=rref([B2,A])B2_A =Columns 1 through 71.0000 0 0 -91.9239 -91.9239 -91.9239 -91.92390 1.0000 0 51.8459 -51.8459 -51.8459 51.84590 0 1.0000 9.8995 -7.0711 -4.2426 1.41420 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 0Columns 8 through 11-91.9239 -91.9239 -91.9239 -91.923951.8459 -51.8459 -51.8459 51.8459-1.4142 4.2426 7.0711 -9.89950 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0B3_A=rref([B3,A])B3_A =Columns 1 through 71.0000 0 0 91.9239 91.9239 91.9239 91.92390 1.0000 0 42.3447 -38.1021 -33.8594 29.61680 0 1.0000 12.6462 -16.8889 -21.1315 25.37410 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 0Columns 8 through 1191.9239 91.9239 91.9239 91.923925.3741 -21.1315 -16.8889 12.646229.6168 -33.8594 -38.1021 42.34470 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0〖说明〗●magic(n)产生魔方阵。