逐点比较法直线插补资料讲解
逐点比较法
b) 逆圆弧
图3-9 第一象限顺、逆圆弧
14
偏差递推简化:对第一象限顺圆,Fi≥0,动点Pi(Xi,Yi)应 向-Y向进给,新的动点坐标为(Xi+1,Yi+1),且Xi+1=Xi,Yi +1=Yi-1,则新点的偏差值为:
15
若Fi<0时,沿+X向前进一步,到达(Xi+1,Yi)点,新点
的偏差值为:
补。
Y
A(0,4) 4 3
2
1
B(4,0)
O 1 2 34
X
图3-11 圆弧插补实例
18
表3-2 例3-2圆弧插补计算过程
19
四个象限中圆弧插补
第一象限逆圆弧CD的运动趋势是X轴绝对值减少,Y 轴绝对值增大,当动点在圆弧上或圆弧外,即Fi≥0时,X
轴沿负向进给,新动点的偏差函数为: (3-8)
Fi<0时,Y轴沿正向进给,
7
例3-1: 加工第一象限直线OE,如图3-5所示,起点为坐标
原点,终点坐标为E(4,3)。试用逐点比较法对该段
直线进行插补,并画出插补轨迹。
Y
3
E(4,3)
2
1
O 1 2 34
X
图3-5 直线插补轨迹过程实例
8
表3-1 直线插补运算过程
序号 偏差判别 坐标进给 起点
1 F0=0 +X 2 F1<0 +Y 3 F2>0 +X 4 F3<0 +Y 5 F3>0 +X 6 F5<0 +Y 7 F6>0 +X
新动点的偏差函数为
(3-9)
20
逐点比较法圆弧插补偏差运算表
SR1 -Δy +Δx SR3 +Δy -Δx NR2 -Δy -Δx NR4 +Δy +Δx SR2 +Δx -Δy SR4 -Δx +Δy NR1 -Δx -Δy NR3 +Δx +Δy
逐点比较法
即
Fi1 Fi X e
6
在插补计算、进给的同时还要进行终点判别。常用终点判 别方法是:
设置一个长度计数器,从直线的起点走到终点,刀具沿
X 轴应走的步数为X e,沿Y 轴走的步数为Ye,计数器中存入 X和Y两坐标进给步数总和∑=∣Xe∣+∣Ye∣,当X 或Y
坐标进给时,计数长度减一,当计数长度减到零时,即∑= 0时,停止插补,到达终点。
终点判别:判断是否到达终点,若到 达x ,结束插补;否则,继续以上四个
步骤(如图3-3所示)。
图3-3 逐点比较法工作循环图
3
2. 直线插补
图3-4所示第一象限直线OE为给定轨迹,其方程为
XeY-XYe=0
(3-1)
P(X,Y)为动点坐标,与直线的关系有三种情况:
(1)若P1点在直线上方,则有XeY-XYe>0 E (2) 若P点在直线上,则有 XeY-XYe=0
2.由偏差方程确定加工动点引起的偏 差符号(若要计算偏差量,则偏差方程系数不能简 化)。
3.下一步插补方向确定原则:向使加 工偏差减小、并趋向轨迹终点的方向插补
.(将偏差等于零的情况并入偏差大于零的情况)。
4.关于插补量:每次插补一个脉冲当 量的位移
12
3. 圆弧插补
在圆弧加工过程中,可用动点到圆心的距离来描述刀具位置与 被加工圆弧之间关系。
b) 逆圆弧
图3-9 第一象限顺、逆圆弧
14
偏差递推简化:对第一象限顺圆,Fi≥0,动点Pi(Xi,Yi)应 向-Y向进给,新的动点坐标为(Xi+1,Yi+1),且Xi+1=Xi,Yi +1=Yi-1,则新点的偏差值为:
15
若Fi<0时,沿+X向前进一步,到达(Xi+1,Yi)点,新点
逐点比较法直线插补

3.2.1 逐点比较法直线插补
• 逐点比较法插补: 每走一步都要和给定轨迹上 的坐标值进行比较,看这点在给定轨迹的上方 或下方,或是给定轨迹的里面或外面,从而决 定下一步的进给方向。比较一次,决定下一步 走向,以便逼近给定轨迹,即形成逐点比较插 补。 • 加工精度: 逐点比较法规定的加工直线或圆弧 之间的最大误差为一个脉冲当量,因此只要把 脉冲当量(每走一步的距离即步长)取得足够 小,就可达到加工精度的要求。
3.2 插补原理
•在CNC数控机床上,各种曲线轮廓加工都是通过插补计算实现的, 插补计算的任务就是对轮廓线的起点到终点之间再密集的计算出有 限个坐标点,刀具沿着这些坐标点移动,用折线逼近所要加工的曲 线。 •插补方法可以分为两大类:脉冲增量插补和数据采样插补。 •脉冲增量插补是控制单个脉冲输出规律的插补方法,每输出一个脉 冲,移动部件都要相应的移动一定距离,这个距离就是脉冲当量, 因此,脉冲增量插补也叫做行程标量插补。如逐点比较法、数字积 分法。该插补方法通常用于步进电机控制系统。 •数据采样插补,也称为数字增量插补,是在规定的时间内,计算出 个坐标方向的增量值、刀具所在的坐标位置及其他一些需要的值。 这些数据严格的限制在一个插补时间内计算完毕,送给伺服系统, 再由伺服系统控制移动部件运动,移动部件也必须在下一个插补时 间内走完插补计算给出的行程,因此数据采样插补也称作时间标量 插补。数据采样插补采用数值量控制机床运动,机床各坐标方向的 运动速度与插补运算给出的数值量和插补时间有关。该插补方法是 用于直流伺服电动机和交流伺服电动机的闭环或半闭环控制系统。 •数控系统中完成插补工作的部分装置称为插补器。
Fm<0 x
注意:起点偏差F0=0
偏差公式简化
x y xy y Fm ye y ( x 1 ) y Fm 0 Fm 1 x e m me e e m m e
实验课讲稿(实验二 逐点比较法插补实验)
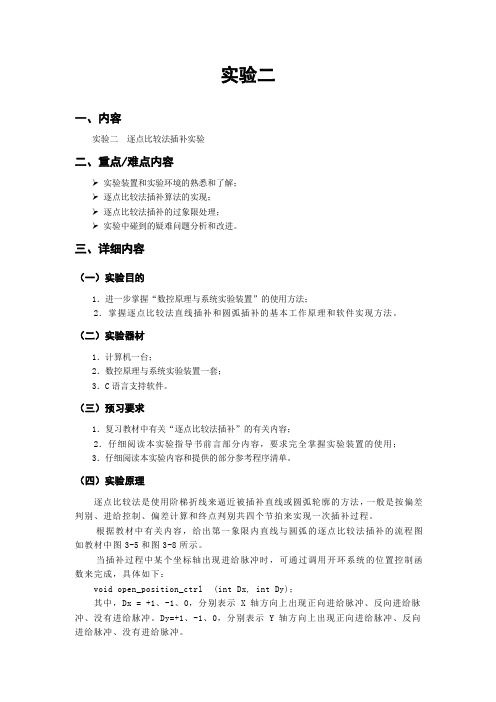
实验二一、内容实验二逐点比较法插补实验二、重点/难点内容实验装置和实验环境的熟悉和了解;逐点比较法插补算法的实现;逐点比较法插补的过象限处理;实验中碰到的疑难问题分析和改进。
三、详细内容(一)实验目的1.进一步掌握“数控原理与系统实验装置”的使用方法;2.掌握逐点比较法直线插补和圆弧插补的基本工作原理和软件实现方法。
(二)实验器材1.计算机一台;2.数控原理与系统实验装置一套;3.C语言支持软件。
(三)预习要求1.复习教材中有关“逐点比较法插补”的有关内容;2.仔细阅读本实验指导书前言部分内容,要求完全掌握实验装置的使用;3.仔细阅读本实验内容和提供的部分参考程序清单。
(四)实验原理逐点比较法是使用阶梯折线来逼近被插补直线或圆弧轮廓的方法,一般是按偏差判别、进给控制、偏差计算和终点判别共四个节拍来实现一次插补过程。
根据教材中有关内容,给出第一象限内直线与圆弧的逐点比较法插补的流程图如教材中图3-5和图3-8所示。
当插补过程中某个坐标轴出现进给脉冲时,可通过调用开环系统的位置控制函数来完成,具体如下:void open_position_ctrl (int Dx, int Dy);其中,Dx = +1、-1、0,分别表示X轴方向上出现正向进给脉冲、反向进给脉冲、没有进给脉冲。
Dy=+1、-1、0,分别表示Y轴方向上出现正向进给脉冲、反向进给脉冲、没有进给脉冲。
在将进给脉冲送给小型铣床执行的同时,也可通过CRT来模拟显示插补轨迹,以便观察插补过程的正确性。
为了简单起见,本次实验过程中只要求实现L1和NR1的插补。
(五)参考程序清单见实验教材《数控系统综合实践》所附光盘。
(六)实验步骤1.启动C语言编辑环境,打开实验程序文件(exp03.cpp);2.输入预先编好的部分程序;3.调试程序,并通过CRT模拟显示,验证其正确性。
(*) 调试过程中不开功放电源。
4.在模拟成功后,增加位置控制输出程序,并打开功放电源,利用小型铣床画出被插补的结果。
§1.4--逐点比较法——直线插补
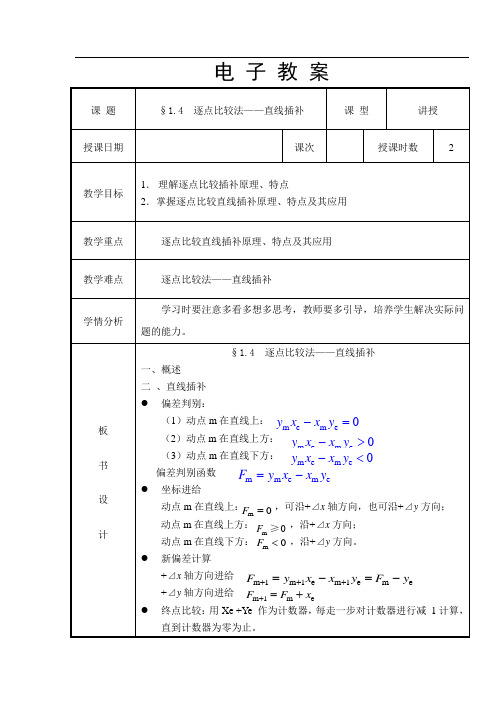
电子教案教学程序教学内容及教学双边活动与教学方法导入新课讲授探究总结在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向,使刀具向减小误差的方向进给。
其算法最大偏差不会超过一个脉冲当量δ。
§1.4 逐点比较法——直线插补一、概述初称区域判别法,又称代数运算法或醉步式近似法。
这种方法应用广泛,能实现平面直线、圆弧、二次曲线插补,精度高。
每进给一步需要四个节拍:(1)偏差判别:判别加工点对规定图形的偏离位置,决定拖板进给的走向。
(2)坐标进给:控制某个坐标工作台进给一步,向规定的图形靠拢,缩小偏差。
(3)偏差计算:计算新的加工点对规定图形的偏差,作为下一步判别的依据。
(4)终点判断:判断是否到达终点。
若到达则停止插补,若没,再回到第一节拍。
介绍讲授图示分析讲授法理解记忆教学程序教学内容及教学双边活动与教学方法新课讲授探究总结二、直线插补1.偏差计算公式如图所示第一象限直线OA,起点O为坐标原点,编程时,给出直线的终点坐标A ,直线方程为:●偏差判别:(1)动点m在直线上:(2)动点m在直线上方:(3)动点m在直线下方:偏差判别函数●坐标进给(1)动点m在直线上:,可沿+⊿x轴方向,也可沿+⊿y方向;(2)动点m在直线上方:,沿+⊿x方向;(3)动点m在直线下方:,沿+⊿y方向。
举例板图分析总结e e(,)x ym e m ey x x y-=m e m ey x x y-=m e m ey x x y->m e m ey x x y-<m m e m eF y x x y=-mF<mF≥mF=教学程序教学内容及教学双边活动与教学方法探究总结例题讲授●新偏差计算+⊿x轴方向进给+⊿y轴方向进给●终点比较用Xe +Ye 作为计数器,每走一步对计数器进行减1计算,直到计数器为零为止。
2.终点判别法分别计数法双向计数法单向计数法3.插补运算过程插补计算时,每走一步,都要进行以下4个步骤(又称4个节拍)的算术运算或逻辑判断:方向判定:根据偏差值判定进给方向。
第02章 逐点比较法直线插补原理

第2章 直线插补原理
即:在对数控系统输入有点坐标点(起点、终 点)的情况下,计算机根据线段的特征(直线、 圆弧、椭圆等),运用一定的算法,自动地在 有限坐标点之间生成一系列的坐标数据,从而 自动地对各坐标轴进行脉冲分配,完成整个线 段的轨迹运行,以满足加工精度的要求。
插补的任务就是根据进给速度的要求,在一段 零件轮廓的起点和终点之间“插入”和“补上” 运动轨迹中各个中间点的坐标。
② 如果刀具加工点Pi ( Xi,Yi )处于直线下方 时( Fi≦0ቤተ መጻሕፍቲ ባይዱ),应该向+Y方向发一个脉冲,使 机床刀具向+Y方向前进一步,以接近该直线。
第2章 直线插补原理
通常为简化运算,我们一般采用偏差函数的递推 式(迭代式)进行计算,即由前一点计算后一点。
∵
若 Fi , 则y向i xXe 轴发x出i y一e 个进给脉冲,刀具从该点向
2.1.4 插补的实质
曲线方程:Y=F(X) 函数关系表示X与Y一一对应,对于曲线上的某一点的 邻域,其坐标增量关系也是确定的,即给X1一个增量 △X存在一个△Y使Y1+△Y=F(X1+△X)这使△X与 △Y之间有一种制约,那就是由△X找到一个△Y使F (X1+△X)等于或接近于Y1+△Y,插补就是这种寻 找△X与△Y之间制约的方法。
2.2 逐点比较法插补原理
2.2.1 逐点比较法的基本思想
每走一步都要将加工点的瞬时坐标同规定的图 形轨迹相比较,判断其偏差,然后决定下一步 的走向,如果加工点走到图形外面去了,那么 下一步就要向图形里面走;如果加工点在图形 里面,那么下一步就要向图形外面走,以缩小 偏差。
第2章 直线插补原理
2.2.2 逐点比较法的四个基本步骤
逐点比较法直线插补原理
偏差判别
F0,0=0 F1,0=-2<0 F1,1=1>0 F2,1=-1<0 F2,2=2>0
坐标进给
+△X +△Y +△X +△Y +△X
偏差计算 F0,0=0 F1,0= F0,0-Ye =-2 F1,1= F1,0+X e =1 F2,1= F1,1-Ye =-1 F2,2= F2,1+X e =2 F3,2= F2,2-Ye =0
4 F3<0 +Y 5 F3>0 +X 6 F5<0 +Y
F4 F3 Xe 2
F5 F6
F4 F5
Ye Xe
1
Y3
7 F6>0 +X
F7 F6 Ye 0 3
2
《数控技术及装
终 点判别
∑=7 ∑=6 ∑=5 ∑=4 ∑=3 ∑=2 ∑=1 ∑=0
E(4,3)
1
O 1 234
X 13
§ 4-1 插 补 原 理 与 程 序 设 计
F≥0
L1 F<0
标值的符号来确定。
➢ 按照以上的插补规律,
可编制出逐点比较法直
F<0
线插补的程序。下面是
编制的演示程序。
L3
O
F≥0 F≥0
x F<0
L4
18
结语
谢谢大家!
一个脉冲当量,输出脉冲均匀,
速度变化小,调节方便。
(2,2) (3,2)
(1,1)
(2,1)
X
(0,0)
(1,0)
7
§ 4-1 插 补 原 理 与 程 序 设 计
1. 逐点比较法直线插补算法
《数控技术及装
逐点比较法(代数运算法、醉步法)图解
逐点比较法(代数运算法、醉步法)图解1、逐点比较法直线插补第Ⅰ象限一加工直线,起点坐标原点O,终点坐标为A(xe,ye),则直线方程可表示为,即令Fi,j=xeyj-yexi为偏差判别函数,则有:(1)当Fi,j≥0时,向+X方向进给一个脉冲当量,到达点Pi+1,j,此时xi+1=xi+1,则点Pi+1,j的偏差判别函数Fi+1,j为(2)当Fi,j<0时,向+Y方向进给一个脉冲当量,到达点Pi,j +1,此时yj+1=yj+1,则点Pi,j+1的偏差判别函数Fi,j+1为可见,新加工点的偏差Fi+1,j或Fi,j+1是由前一个加工点的偏差Fi,j和终点的坐标值递推出来的,假如按前两式计算偏差,则计算大为简化。
终点判别三种方法:(1)判别插补或进给的总步数:N=Xe+Ye;(2)分别判别各坐标轴的进给步数;(3)仅推断进给步数较多的坐标轴的进给步数。
总结:第一拍判别其次拍判别第三拍判别第四拍比较Fij≥0+ΔxFi+1,j= Fi,j-yeEi+j=E终-1Fij0+ΔyFi,j+1= Fi,j+xe第Ⅰ象限直线插补流程图:例5-1 设加工第一象限直线,起点为坐标原点O(0,0),终点A (6,4),用逐点比较法对其进行插补,并画出插补轨迹。
终点判别寄存器E=6+4=10,每进给一步减1,E=0时停止插补。
步数偏差判别坐标进给偏差计算终点判别起点F0,0=0E=101F0,0=0+XF1,0=F0,0-ye=0-4=-4 E=10-1=92F1,0<0+YF1,1= F1,0+xe=-4+6=2 E=9-1=83F1,1>0+XF2,1= F1,1-ye=2-4=-2 E=8-1=74F2,1<0+YF2,2= F2,1+xe=-2+6=4 E=7-1=65F2,2>0+XF3,2= F2,2-ye=4-4=0 E=6-1=56F3,2=0+XF4,2= F3,2-ye=0-4=-4 E=5-1=47F4,2<0+YF4,3= F4,2+xe=-4+6=2 E=4-1=38F4,3>0+XF5,3= F4,3-ye=2-4=-2 E=3-1=29F5,3<0+YF5,4= F5,3+xe=-2+6=4E=2-1=110F5,4>0+XF6,4= F5,4-ye=4-4=0E=1-1=02、其他象限直线插补的方法:1)分别处理法分别建立其他三个象限偏差函数计算公式。
§1.4 逐点比较法——直线插补
电子教案教学程序教学内容及教学双边活动与教学方法导入新课讲授探究总结在刀具按要求轨迹运动加工零件轮廓的过程中,不断比较刀具与被加工零件轮廓之间的相对位置,并根据比较结果决定下一步的进给方向,使刀具向减小误差的方向进给。
其算法最大偏差不会超过一个脉冲当量δ。
§1.4 逐点比较法——直线插补一、概述初称区域判别法,又称代数运算法或醉步式近似法。
这种方法应用广泛,能实现平面直线、圆弧、二次曲线插补,精度高。
每进给一步需要四个节拍:(1)偏差判别:判别加工点对规定图形的偏离位置,决定拖板进给的走向。
(2)坐标进给:控制某个坐标工作台进给一步,向规定的图形靠拢,缩小偏差。
(3)偏差计算:计算新的加工点对规定图形的偏差,作为下一步判别的依据。
(4)终点判断:判断是否到达终点。
若到达则停止插补,若没,再回到第一节拍。
介绍讲授图示分析讲授法理解记忆教学程序教学内容及教学双边活动与教学方法新课讲授探究总结二、直线插补1.偏差计算公式如图所示第一象限直线OA,起点O为坐标原点,编程时,给出直线的终点坐标A ,直线方程为:●偏差判别:(1)动点m在直线上:(2)动点m在直线上方:(3)动点m在直线下方:偏差判别函数●坐标进给(1)动点m在直线上:,可沿+⊿x轴方向,也可沿+⊿y方向;(2)动点m在直线上方:,沿+⊿x方向;(3)动点m在直线下方:,沿+⊿y方向。
举例板图分析总结e e(,)x ym e m ey x x y-=m e m ey x x y-=m e m ey x x y->m e m ey x x y-<m m e m eF y x x y=-mF<mF≥mF=教学程序教学内容及教学双边活动与教学方法探究总结例题讲授●新偏差计算+⊿x轴方向进给+⊿y轴方向进给●终点比较用Xe +Ye 作为计数器,每走一步对计数器进行减1计算,直到计数器为零为止。
2.终点判别法分别计数法双向计数法单向计数法3.插补运算过程插补计算时,每走一步,都要进行以下4个步骤(又称4个节拍)的算术运算或逻辑判断:方向判定:根据偏差值判定进给方向。
逐点比较法直线插补PPT课件
(2)直线插补计算的程序流程
第9页/共15页
〔例3.1〕设加工第一象限直线段OA,起 点为O(0,0),终点坐标为A(6,4),试进
行插补计算并作出走步轨迹图。 〔解〕
xe = 6, ye =4 , F0 = 0, xoy = 1. 坐标进给的总步数
Nxy = | 6-0 | + | 4-0 | = 10
5 F4>0 +x F5=F4-ye=0 Nxy=5 1
6 7
F5=0 F6<0
+x +y
F6=F5-ye=-4 Nxy=4 O
F7=F6+xe=2 Nxy=3
1
2
8 F7>0 +x F8=F7-ye=-2 Nxy=2
9 F8<0 +y F9=F8+xe=4 Nxy=1
10 F9>0 +x F10=F9-ye=0第1N1页xy/共=015页
34
A 5 6x
小结
直线插补的过程 偏差判别 坐标进给 新偏差计算 终点判断
第14页/共15页
感谢您的观看!
第15页/共15页
第10页/共15页
步数 偏差判别 坐标进给 偏差计算
终点判断
起点
F0=0
Nxy=1
0
1 F0= +x F1=F0-ye=-4 Nxy=9 0
y
2 F1< +y F2=F1+xe=2 Nxy=8
0
4
3 4
F2> F3<0
+x +y
F3=F2-ye=-2 Nxy=7 3 F4=F3+xe=4 Nxy=6 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
逐点比较法直线插补 y
1.算法分析(第Ⅰ象限)
A(xe,ye)
直线上
ym ye xm xe
ymxe-xmye 0
Fm>0
Fm=0
m m(xm,ym)
m
直线上方
ym xm
ye xe
ymxe-xmye 0 O
Fm<0 x
直线下方
ym xm
ye xe
ymxe-xmye 0 =0 在直线上
偏差判别函数
Fm 0 F m 1 xe(ym1)xmye xeymxmyexeFm xe
(2)终点判断方法
①设置Nx和Ny两个减法计数器,在加工开始前,在Nx和 Ny计数器中分别存入终点坐标值xe和ye,在x坐标(或y坐 标)进给一步时,就在Nx计数器(或Ny计数器)中减去1, 直到这两个计数器中的数都减到零时,到达终点。 ②用一个终点计数器,寄存x和y两个坐标进给的总步数Nxy, x或y坐标进给一步,Nxy就减1,若Nxy=0,则就达到终点。
(2)直线插补计算的程序流程
〔例3.1〕设加工第一象限直线段OA,起 点为O(0,0),终点坐标为A(6,4),试进
行插补计算并作出走步轨迹图。 〔解〕
xe = 6, ye =4 , F0 = 0, xoy = 1. 坐标进给的总步数
Nxy = | 6-0 | + | 4-0 | = 10
步数 偏差判别 坐标进给 偏差计算
终点判断
起点
F0=0
Nxy=1
0
1 F0= +x F1=F0-ye=-4 Nxy=9 0
y
2 F1< +y F2=F1+xe=2 Nxy=8
0
4
3 4
F2> F3<0
+x +y
F3=F2-ye=-2 Nxy=7 3 F4=F3+xe=4 Nxy=6 2
5 F4>0 +x F5=F4-ye=0 Nxy=5 1
Fm
ym xe
- xm ye
>0
在直线上方
<0 在直线下方
Fm>0 Fm<0 Fm=0
直线上方 直线下方 直线上
坐标进给
+x方向
y
+y方向
+x或+y方向
注意:起点偏差F0=0
O
偏差公式简化
Fm>0
A(xe,ye) Fm=0
Fm<0 x
Fm 0 F m 1 xeym(xm1)ye xeymxmyeyeFm ye
四个象限的直线插补
偏差 1象限 2象限 3象限 4象限 偏差公式
Fm≥0 +x -x
-x
+x
Fm+1=Fm-
ye
Fm<0 +y +y
-y
-y
Fm+1=Fm+
xe
3.直线插补运算的程序实现
(1) 开辟六个单元XE、YE、NXY、FM、XOY和ZF, 分别存放终点横坐标xe、终点纵坐标ye、总步数 Nxy、加工点偏差Fm、直线所在象限值xoy和走步 方向标志。其中: Nxy=Nx+Ny, xoy等于1、2、3、4分别代表第一、第二、第三、 第四象限, Fm的初值为F0=0, ZF=1、2、3、4分别代表+x、-x、+y、-y走步 方向。
6 7
F5=0 F6<0
+x +y
F6=F5-ye=-4 Nxy=4 O
F7=F6+xe=2 Nxy=3
1
2
8 F7>0 +x F8=F7-ye=-2 Nxy=2
9 F8<0 +y F9=F8+xe=4 Nxy=1
10 F9>0ຫໍສະໝຸດ +x F10=F9-ye=0 Nxy=0
34
A 5 6x
小结
直线插补的过程
偏差判别 坐标进给 新偏差计算 终点判断
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好!谢谢
逐点比较法直线插补
3.2.1 逐点比较法直线插补
• 逐点比较法插补: 每走一步都要和给定轨迹上 的坐标值进行比较,看这点在给定轨迹的上方 或下方,或是给定轨迹的里面或外面,从而决 定下一步的进给方向。比较一次,决定下一步 走向,以便逼近给定轨迹,即形成逐点比较插 补。
• 加工精度: 逐点比较法规定的加工直线或圆弧 之间的最大误差为一个脉冲当量,因此只要把 脉冲当量(每走一步的距离即步长)取得足够 小,就可达到加工精度的要求。