逐点比较法直线插补圆弧插补实例
插补运动(逐点比较法)

1、概述在机床的实际加工中,被加工工件的轮廓形状千差万别,各式各样。
严格说来,为了满足几何尺寸精度的要求,刀具中心轨迹应该准确地依照工件的轮廓形状来生成。
然而,对于简单的曲线,数控装置易于实现,但对于较复杂的形状,若直接生成,势必会使算法变得很复杂,计算机的工作量也相应地大大增加。
因此,在实际应用中,常常采用一小段直线或圆弧去进行逼近,有些场合也可以用抛物线、椭圆、双曲线和其他高次曲线去逼近(或称为拟合)。
所谓插补是指数据密化的过程。
在对数控系统输入有限坐标点(例如起点、终点)的情况下,计算机根据线段的特征(直线、圆弧、椭圆等),运用一定的算法,自动地在有限坐标点之间生成一系列的坐标数据,即所谓数据密化,从而自动地对各坐标轴进行脉冲分配,完成整个线段的轨迹运行,以满足加工精度的要求。
机床数控系统的轮廓控制主要问题就是怎样控制刀具或工件的运动轨迹。
无论是硬件数控(NC)系统,还是计算机数控(CNC)系统或微机数控(MNC)系统,都必须有完成插补功能的部分,只是采取的方式不同而已。
在CNC或MNC中,以软件(程序)完成插补或软、硬件结合实现插补,而在NC中有一个专门完成脉冲分配计算(即插补计算)的计算装置——插补器。
无论是软件数控还是硬件数控,其插补的运算原理基本相同,其作用都是根据给定的信息进行数字计算,在计算过程中不断向各个坐标发出相互协调的进给脉冲,使被控机械部件按指定的路线移动。
有关插补算法问题,除了要保证插补计算的精度之外,还要求算法简单。
这对于硬件数控来说,可以简化控制电路,采用较简单的运算器。
而对于计算机数控系统来说,则能提高运算速度,使控制系统较快且均匀地输出进给脉冲。
经过多年的发展,插补原理不断成熟,类型众多。
从产生的数学模型来分,有直线插补、二次曲线插补等;从插补计算输出的数值形式来分,有基准脉冲插补(又称脉冲增量插补)和数据采样插补。
在基准脉冲插补中,按基本原理又分为以区域判别为特征的逐点比较法插补,以比例乘法为特征的数字脉冲乘法器插补,以数字积分法进行运算的数字积分插补,以矢量运算为基础的矢量判别法插补,兼备逐点比较和数字积分特征的比较积分法插补,等等。
插补象限圆弧走向处理以及逐点比较法合成进给速PPT教案

② 具有固定的过象限顺序。 逆圆弧:NR1 → NR2 → NR3 → NR4 → NR1 →• • • 顺圆弧:SR1 → SR4 → SR3 → SR2 → SR1 →• • •
③ 过象限圆弧与坐标轴必有交点,当动点处在坐标轴上时必有 一个坐标值为零。此点可以作为过象限的标志。
④ 终点判别不能简单地直接使用前述的三种方法,否则将丢失 一部分圆弧轮廓。
型 进给 新位置坐标
新位置偏差
Fi ≺ 0
进给 新位置坐标
新位置偏差
SR1 -Y X i1 X i Yi1 Yi 1
Fi1 Fi 2Yi 1 +X
X i1 X i 1 Yi1 Yi
Fi1 Fi 2Xi 1
NR1
-X
X i1 X i 1 Yi1 Yi
Fi1 Fi 2Xi 1
+Y
O
0°
45°
90°X
根据根据上式和该图可得如下结论:
① 当刀具沿着平行于坐标轴的方向进行切削时,合成进给速度最 大,等于脉冲源进给速度;当刀具沿其他方向切削时,合成进给速度 总是小于脉冲源进给速度。
② 直线插补合成进给速度是恒定的,但其值随插补直线与X轴的 夹角而变化,其变化范围为(0.707—1.0)vMF 。
③ SR1 → NR1:X轴、Y轴对调 NR1 → SR1:X轴、Y轴对调
采用对称性处理方法,四象限圆弧插补问题的统一处理算法如下。
线
Fi ≥ 0
型 坐标进给 新位置偏差值计算
SR1
-Y
NR2
-Y
SR3
+Y
NR4
+Y
Fi1 Fi 2 | Yi | 1 | Yi1 || Yi | 1
逐点比较法直线插补圆弧插补实例

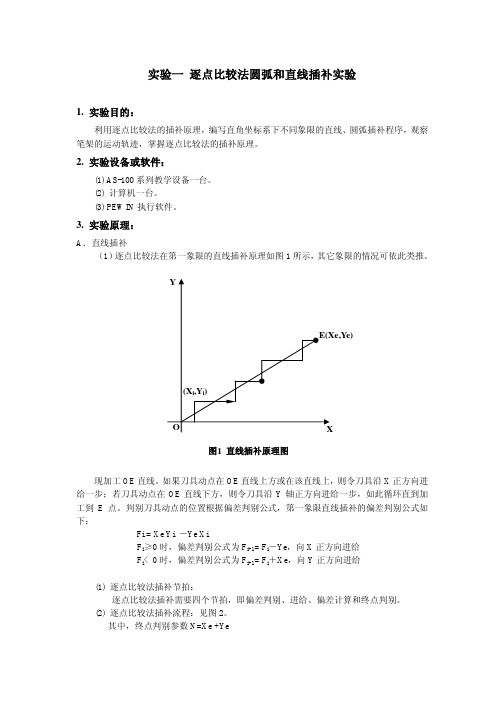
逐点比较法直线插补(1)偏差函数构造对于第一象限直线OA上任一点(X,Y):X/Y = Xe/Ye若刀具加工点为Pi(Xi,Yi),则该点的偏差函数Fi可表示为:若Fi= 0,表示加工点位于直线上;若Fi> 0,表示加工点位于直线上方;若Fi< 0,表示加工点位于直线下方。
(2)偏差函数字的递推计算采用偏差函数的递推式(迭代式):既由前一点计算后一点Fi =Yi Xe -XiYe若Fi>=0,规定向+X 方向走一步Xi+1 = Xi +1Fi+1 = XeYi –Ye(Xi +1)=Fi –Ye若Fi<0,规定+Y 方向走一步,则有Yi+1 = Yi +1Fi+1 = Xe(Yi +1)-YeXi =Fi +Xe(3)终点判别直线插补的终点判别可采用三种方法。
1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。
(4)例对于第一象限直线OA,终点坐标Xe=6 ,Ye=4,插补从直线起点O开始,故F0=0 。
终点判别是判断进给总步数N=6+4=10,将其存入终点判别计数器中,每进给一步减1,若N=0,则停止插补。
逐点比较法圆弧插补(1)偏差函数构造任意加工点Pi(Xi,Yi),偏差函数Fi可表示为若Fi=0,表示加工点位于圆上;若Fi>0,表示加工点位于圆外;若Fi <0,表示加工点位于圆内(2)偏差函数的递推计算1) 逆圆插补若F ≥0,规定向-X 方向走一步若Fi<0,规定向+Y 方向走一步2) 顺圆插补若Fi ≥0,规定向-Y 方向走一步若Fi<0,规定向+y 方向走一步(3)终点判别1)判断插补或进给的总步数: 2)分别判断各坐标轴的进给步数: (4)例对于第一象限圆弧AB ,起点A (4,0),终点B (0,4)⎩⎨⎧+-=-+-=-=++12)1(122211i i i i i ii X F R Y X F X X ⎩⎨⎧++=-++=+=++12)1(122211i i i i i i i Y F R Y X F Y Y ⎩⎨⎧+-=--+=-=++12)1(122211i i i i i i i Y F R Y X F Y Y ⎩⎨⎧++=-++=+=++12)1(122211i i i i i i i X F R Y X F X X ba b a Y Y X X N -+-=ba x X X N -=b a y Y Y N -=。
实验一 逐点比较法圆弧和直线插补实验
Y B(xe,ye)
M(xm,ym)
Rm R
A(x0,y0)
O 图3 圆弧插补原理图 X
圆弧插补原理参见上图,对于第一象限逆圆,设圆弧的起点为 A(x0,y0),终点为 B(xe,ye), 圆弧半径为 R。加工点为 M(xm,ym),它与圆心的距离为 Rm,则
(1)偏差计算
Fm
=
Rm2
− R2
=
xm2
p102=p102-p104 p101=p101+1 x-0.1 else p102=p102+p103 p101=p101+1 y0.1
;计算新的偏差值(Fi+1=Fi-ya) ;步数计数器加一 ;X方向进分别是(-0.1 -0.5 -1.0) ;偏差判别(若P102小于0表示刀具在直线下方) ;计算新的偏差值(Fi+1=Fi+xa) ;步数计数器加一 ;Y方向进给分别是(0.1 0.5 1.0)
endif
endwhile
close
(3)根据直线插补编成格式,编写所给圆弧插补程序。 各组的圆弧的插补任务是: u 第一组:圆弧半径 50,第二象限顺圆;
第二组:圆弧半径 50,第二象限逆圆; 第三组:圆弧半径 60,第三象限顺圆; 第四组:圆弧半径 60,第三象限逆圆; 第五组:圆弧半径 70,第四象限顺圆; 第六组:圆弧半径 70,第四象限逆圆; open prog7 clear linear inc p101=0 p102=0 p103=0 p104=50 while(p101!>100) if(p102!<0) y0.5 p101=p101+1 p102=p102-2*p104+1 p104=p104-1 else -x0.5 p101=p101+1 p102=p102-2*p103+1 p103=103-1 endif endwhile close
逐点比较法插补实验报告
实验报告实验内容:逐点比较法直线和圆弧插补2011年9月25日院系:物科院班级:085 学号:07080518 姓名:陈实实验目的:利用逐点比较法的插补原理,编写直角坐标系下的直线、圆弧插补程序,观察屏幕上仿真的运动轨迹,掌握逐点比较法的插补原理。
实验原理:逐点比较发是基于动点与理想曲线院函数的比较来实现插补的。
逐点比较法的插补过程,每走一步要进行一下四个步骤:偏差判别:根据偏差值确定刀具相对加工曲线的位置坐标进给:根据偏差判别的结果,决定控制线沿哪个坐标进给一步以接近曲线偏差计算:计算新加工店相对曲线的偏差,作为下一步偏差判别的依据终点判别:判别是否到达终点,未到达终点则返回第一步继续插补,到终点则停止1、逐点比较法直线插补原理:逐点比较法在第一象限的直线插补原理如下图所示,其他象限情况可依次类推。
现加工OE直线,如果刀具动点在OE直线上方或在线上,则令刀具沿X正方向进给一步;若刀具动点在OE直线下方,则令刀具沿Y轴正方向进给一步,如此循环直到加工到E点。
判别刀具动点的位置根据偏差函数判别公式:根据这个公式可以推到出两种不同情况下的地推公式:对于插补终点的判别,可以采用单向的计数长度法,即:取计数长度M等于Xe、Ye中的大者,并设该坐标方向为计数方向。
插补时,仅在该方向上产生进给时,计数长度减一。
图1的逐点比较法中,工作循环的结束条件就是M减为0.2、逐点比较法圆弧插补原理:逐点比较法在第一象限的圆弧插补原理如图所示,其他象限可一次类推:对于第一象限的逆圆弧,如果动点在圆弧的外侧则令刀具动点沿X轴负方向进给一步。
如果动点在圆弧的内侧则令刀具沿Y轴正方向进给一步。
圆弧的偏差计算公式为:根据这个公式同样可推导出圆弧插补的两种不同情况下的递推公式:对于插补终点的判别,同样可以采用单向的计数长度法,不过对于圆弧,计数的方向并不取决于终点坐标中的大者,而是取决于圆弧终点处。
逐点比较法插补中需要编写插入部分流程图:插入程序:intM,Fi=0,Fi0,Fi1,xi,yi,i=0 ,num=-1;bool Gx; M=Xe+Ye;moveto(x0,y0);setcolor(10);line(x0,y0,x0+Xe*delta,y0-Ye*delta);xi=x0;yi=y0;setcolor(12);while(M>0){getch();if(Fi>=0){linerel(delta,0); xi=xi+delta;Fi0=Fi-Ye;Fi=Fi0; num++;dis_msg(num,Fi,1,0,Fi0,M);}else{linerel(0,-delta);Fi1=Fi+Xe;yi=yi-delta;Fi=Fi1;num++;dis_msg(num,Fi,0,1,Fi1,M);}M--;}圆弧插补实验程序:int M,Fi=0,Fi0,Fi1,xi=R,yi=0,i=0,num=0; M=R;setcolor(10);moveto(x0,y0);arc(x0,y0,0,90,R*delta);setcolor(12);moveto(x0+xi*delta,y0);while(M>0){getch();if(Fi>=0){linerel(-delta,0);Fi0=Fi-2*xi+1;Fi=Fi0;xi=xi--;M--;dis_msg(num,Fi,1,0,Fi0,M);}else{linerel(0,-delta);Fi1=Fi+2*yi+1;Fi=Fi1;yi=yi++;dis_msg(num,Fi,0,1,Fi1,M);}num=num++;}实验中所遇问题分析:1、圆弧插补:Fi0与Fi1的计算,xi,yi计算先写入为:Fi0=Fi-2*xi*delta+1;Fi1=Fi+2*yi*delta+1;xi=xi-delta;yi=yi+delta;但是,实行以后出现的结果不正确,如图,分析:2、关于计数长度M:在直线插补中使用的是双向计数长度 M=xe+ye,插补路线会比较准确。
逐点比较法圆弧插补

逐点比较法圆弧插补逐点比较法圆弧插补过程与直线插补过程类似,每进给一步也都要完成四个工作节拍:偏差判别、坐标进给、偏差计算、终点判别。
但是,逐点比较法圆弧插补以加工点距圆心的距离大于还是小于圆弧半径来作为偏差判别的依据。
如图5-7所示的圆弧AB,其圆心位于原点O(0,0),半径为R,令加工点的坐标为P(xi,yj),则逐点比较法圆弧插补的偏差判别函数为当F=0时,加工点在圆弧上;当F>0时,加工点在圆弧外;当F<0时,加工点在圆弧内。
同插补直线时一样,将Fi,j=0同Fi,j>0归于一类。
下面以第一象限圆弧为例,分别介绍顺时针圆弧和逆时针圆弧插补时的偏差计算和坐标进给情况。
1.插补第一象限逆圆弧1)当Fi,j≥0时,加工点P(xi,yj)在圆弧上或圆弧外,-X方向进给一个脉冲当量,即向趋近圆弧的圆内方向进给,到达新的加工点Pi-1,j,此时xi -1=xi-1,则新加工点Pi-1,j的偏差判别函数Fi-1,j为(2)当Fi,j<0时,加工点P(xi,yj)在圆弧内,+Y方向进给一个脉冲当量,即向趋近圆弧的圆外方向进给,到达新的加工点Pi,j+1,此时yj+1=yj+1,则新加工点Pi,j+1的偏差判别函数Fi,j+12.插补第一象限顺圆弧1)当Fi,j≥0时,加工点P(xi,yj)在圆弧上或圆弧外,-Y方向进给一个脉冲当量,即向趋近圆弧的圆内方向进给,到达新的加工点Pi,,j-1,此时yj-1=yj-1,则新加工点Pi,j-1的偏差判别函数Fi,j-1为2)当Fi,j<0时,加工点P(xi,yj)在圆弧内,+X方向进给一个脉冲当量,即向趋近圆弧的圆外方向进给,到达新的加工点Pi+1,j,此时xi+1=xi +1,则新加工点Pi+1,j的偏差判别函数为Fi+1,j由以上分析可知,新加工点的偏差是由前一个加工点的偏差Fi,j及前一点的坐标值xi、yj递推出来的,如果按式(5-6)、(5-7)、(5-8)、(5-9)计算偏差,则计算大为简化。
3.1数控插补原理(2)逐点比较法

开始 初始化 Xe→X,Ye→Y 0→Fi ,N =|Xe|+|Ye|
Y 进给方向:+X
F≥0 N 进给方向: +Y
Fi- Ye → Fi+1
Fi+ Xe → Fi+1
N = N -1
N =0
N
Y 结束
继续
逐点比较法Ⅰ象限直线插补流程图
例题:设欲加工第一象限直线OE,起点为坐标原点,
终点坐标为Xe=4,Ye=3,用逐点比较法插补之,并画出
+Y F6 F5 2Y5 1 4
-X F7 F6 2X6 1 1
8
F7>0
-X
F8 F7 2X7 1 0
坐标计算
X0=4,Y0=0 X1=3,Y1=0 X2=3,Y2=1 X3=3,Y3=2 X4=3,Y4=3 X5=2,Y5=3 X6=2,Y6=4 X7=1,Y7=4
X8=0,Y8=4
Fi 0, 朝 x 增大方向, Fi1 Fi ye Fi 0, 朝 y 增大方向, Fi1 Fi xe
5.2 脉冲增量插补 其它象限插补流程:
3.逐点比较法Ⅰ象限逆圆插补
(1)基本原理
①偏差判别 关键:寻找偏差函数F(x,y)
当动点N(Xi,Yi)位于圆弧上时有下式成立
Y
E(XeYe) Nˊ
X i2 Yi2 Xe2 Ye2 R2
当动点N(Xi,Yi)在圆弧外侧时,有下式成立
X i2 Yi2 Xe2 Ye2 R2
当动点N(Xi,Yi)在圆弧内侧时,有下式成立
O
N(Xi,Yi) R
N〞 S(XSYS)
X
X i2 Yi2 Xe2 Ye2 R2
I象限逆圆与动点之间的关系
逐点比较法
即
Fi1 Fi X e
6
在插补计算、进给的同时还要进行终点判别。常用终点判 别方法是:
设置一个长度计数器,从直线的起点走到终点,刀具沿
X 轴应走的步数为X e,沿Y 轴走的步数为Ye,计数器中存入 X和Y两坐标进给步数总和∑=∣Xe∣+∣Ye∣,当X 或Y
坐标进给时,计数长度减一,当计数长度减到零时,即∑= 0时,停止插补,到达终点。
终点判别:判断是否到达终点,若到 达x ,结束插补;否则,继续以上四个
步骤(如图3-3所示)。
图3-3 逐点比较法工作循环图
3
2. 直线插补
图3-4所示第一象限直线OE为给定轨迹,其方程为
XeY-XYe=0
(3-1)
P(X,Y)为动点坐标,与直线的关系有三种情况:
(1)若P1点在直线上方,则有XeY-XYe>0 E (2) 若P点在直线上,则有 XeY-XYe=0
2.由偏差方程确定加工动点引起的偏 差符号(若要计算偏差量,则偏差方程系数不能简 化)。
3.下一步插补方向确定原则:向使加 工偏差减小、并趋向轨迹终点的方向插补
.(将偏差等于零的情况并入偏差大于零的情况)。
4.关于插补量:每次插补一个脉冲当 量的位移
12
3. 圆弧插补
在圆弧加工过程中,可用动点到圆心的距离来描述刀具位置与 被加工圆弧之间关系。
b) 逆圆弧
图3-9 第一象限顺、逆圆弧
14
偏差递推简化:对第一象限顺圆,Fi≥0,动点Pi(Xi,Yi)应 向-Y向进给,新的动点坐标为(Xi+1,Yi+1),且Xi+1=Xi,Yi +1=Yi-1,则新点的偏差值为:
15
若Fi<0时,沿+X向前进一步,到达(Xi+1,Yi)点,新点
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
逐点比较法直线插补
(1)偏差函数构造
P
O
对于第一象限直线0A上任一点(X,Y):X/Y=Xe/Ye
若刀具加工点为Pi (Xi , Yi),则该点的F可表示:
偏差函数i为
若Fi=0,表示加工点位于直线上;
若Fi> 0,表示加工点位于直线上方;
若Fi< 0,表示加工点位于直线下方。
(2)偏差函数字的递推计算
采用偏差函数的递推式(迭代式):既由前一点计算后一点
Fi=YiXe-XiYe
若Fi>=0,规定向+X 方向走一步
Xi+1=Xi+1
Fi+仁XeYi - Ye(Xi+1)=Fi - Ye
若Fi<0 ,规定+Y方向走一步,则有
Yi+1=Yi+1
Fi+仁Xe(Yi+1)-YeXi=Fi+Xe
(3)终点判别
直线插补的终点判别可采用三种方法。
1)判断插补或进给的总步数:2)分别判断各坐标轴的进给步数;3)仅判断进给步数较多的坐标轴的进给步数。
(4)例
故于第一象限直线 Xe=6,Ye=4,插补从直线起点 O 开始, N=6+4=10 将其
OA 终点坐标
若N=Q 则停止插补。
步数判别坐标进给僞差廿捧
终点判别J
0 1| 丨F日______ S-10
[11p=0+X片二%* H=T 1 S=10-1=9
2F<0+Y F产F] +i. A4+6=2| 垃用十8 | 3 |F>0
+X 1 £=81^T
I <F<0+Y|送干IM I
5 I F>0+X| 戶* Q S =61=5 I
+X「F眾第=57兰4
1 7F<0+Y| S =4^1=3
I S F>0+X1斗揺煌£
9F<0+¥[X冃暫・gjfr~4I £-21^1
| 10F>0+X%升工十R| £二1「1=0
逐点比较法圆弧插补
(1 )偏差函数构造
任意加工点
若Fi=0,表示加工点位于圆上;
Pi (Xi, Yi),偏差函数Fi可表示为
若Fi>0,表示加工点位于圆外;
若Fi<0,表示加工点位于圆内
(2)偏差函数的递推计算
1)逆圆插补
若F>0,规定向-X方向走一步+ =
X i1X 1
1十+ —
F i1(X1)2Y2F2F i2X1若Fi<0 ,规定向+Y方向走一步]-f
Yi _?
T L '6 1+ —= + +
cl +
X2(Y i1)2R2F i 2Y 1
2 )分别判断各坐标轴的进给 步数: (4) 例
对于第一象限圆弧
偏差判别
坐标进给 偏差计算 坐标计算 终点判别 起点
%二0
如二空场=0
22=4+4=8
1
F-F.-2V1
1 __ =0-2*4+l=-7 ______ 护一口 LvrQ 12-8-1=7
2 F/0 +y F^l^+l 二—T+2*0H 二-6
V 3 尹二 1 g-1 二 6 3
F 2<0
+y
吁 F?+2y 尹 A3 1^4.为=2 S=5
2)顺圆插补
若 Fi >0, 规定向-Y 方向走
Y i
_Y 1
I + —
一
F i __ X 2 (Y i _1)\ F 2
_ F 2Y . 1
若Fi<0 ,规定向+y 方向走一步
X
iV _ X 1
i =
+
+
—
二
+
F
i1 (X i
1)2Y 2 F 2
F2X1
(3 )终点判别
1 )判断插补或进给的总步数: N 匚 X a —X b +Y a —%
Nx - Xa Xb Ny - Ya Yb
(0, 4)
4 F,<0+y F^F s+2y3+l=2 £=4
5 F.X)I F^^^2xj+1——3 %二4,旳=0 53=3 & I F5<0 +y F b=F5+2y5+l=4 £二2 ? F/0r0工屮E吟=4 y7=d E=1
F T<0-I 卩戶厂2屮1二0£=0 8。