根轨迹校正法
根轨迹法校正设计
1 根轨迹法校正设计如果设计指标是时域特征量,应采用时域校正方法,即将设计指标转换为对闭环主导极点位置的设计,常称为根轨迹法。
设计过程中,不必绘制根轨迹图。
根轨迹法同频率分析法一样也可以有串联超前校正、串联滞后校正和串联滞后-超前校正,因“超前”和“滞后”是频域中的概念,在根轨迹法中不使用。
基本概念: ⑴ 动态性能校正使开环增益满足设计要求。
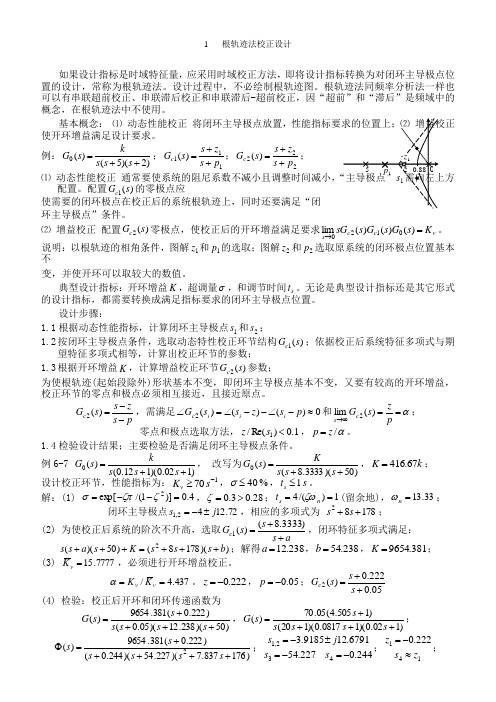
例:)2)(5()(0++=s s s k s G ;111)(p s z s s G c ++=;222)(p s z s s G c ++=; ⑴ 动态性能校正 配置。
配置)(1s G c 的零极点应使需要的闭环极点在校正后的系统根轨迹上,同时还要满足“闭环主导极点”条件。
⑵ 增益校正 配置)(2s G c 零极点,使校正后的开环增益满足要求v c c s K s G s G s sG =→)()()(lim 0120。
说明:以根轨迹的相角条件,图解1z 和1p 的选取;图解2z 和2p 选取原系统的闭环极点位置基本不变,并使开环可以取较大的数值。
典型设计指标:开环增益K ,超调量σ,和调节时间s t 。
无论是典型设计指标还是其它形式的设计指标,都需要转换成满足指标要求的闭环主导极点位置。
设计步骤:1.1 根据动态性能指标,计算闭环主导极点1s 和2s ;1.2 按闭环主导极点条件,选取动态特性校正环节结构)(1s G c ;依据校正后系统特征多项式与期望特征多项式相等,计算出校正环节的参数;1.3 根据开环增益K ,计算增益校正环节)(2s G c 参数;为使根轨迹(起始段除外)形状基本不变,即闭环主导极点基本不变,又要有较高的开环增益,校正环节的零点和极点必须相互接近,且接近原点。
p s z s s G c --=)(2,需满足0)()()(2≈-∠--∠=∠p s z s s G i i i c 和α==∞→pz s G c s )(lim 2; 零点和极点选取方法,1.0)Re(/1<s z ,α/z p =。
控制系统校正的根轨迹方法

控制系统校正的根轨迹方法用根轨迹法进行校正的基础,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S 平面上通过希望的闭环极点。
根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。
应用根轨迹进行校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。
在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。
等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳定性。
在开环传递函数中增加零点,可以使根轨迹向左方移动,从而提高系统的相对稳定性,减小系统调节时间。
等同于微分控制,相当于给系统前向通道中增加了零点,因此增加了系统的超调量,并且加快了瞬态响应。
根轨迹超前校正计算步骤如下。
(1)作原系统根轨迹图;(2)根据动态性能指标,确定主导极点i s 在S 平面上的正确位置; 如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3)在新的主导极点上,由幅角条件计算所需补偿的相角差φ; 计算公式为:is s=︒±=(s)][G arg -180o ϕ (1)此相角差φ表明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件。
(4)根据相角差φ,确定微分校正装置的零极点位置; 微分校正装置的传递函数为:11++=sTp sTz KcGc (2)例题:已知系统开环传递函数: 试设计超前校正环节,使其校正后系统的静态速度误差系数Kv ≤4.6,闭环主导极点满足阻尼比ζ=0.2,自然振荡角频率ωn=12.0rad/s ,并绘制校正前后系统的单位阶跃响应曲线、单位脉冲响应曲线和根轨迹。
解: 由6.4)(*)(0*lim 0==→s Gc s G s Kv s 得kc=2计算串联超前校正环节的matlab 程序如下: 主函数: close; num=2.3;den=conv([1,0],conv([0.2,1],[0.15,1])); G=tf(num,den) %校正前系统开环传函 zata=0.2;wn=12.0; %要求参数 [num,den]=ord2(wn,zata); %追加系统动态特性 s=roots(den); s1=s(1);kc=2; %增益kc Gc=cqjz_root(G,s1,kc)GGc=G*Gc*kc %校正后系统开环传函 Gy_close=feedback(G,1) %校正前系统闭环传函 Gx_close=feedback(GGc,1) %校正后系统闭环传函 figure(1);step(Gx_close,'b',3.5); %校正后单位阶跃响应 hold onstep(Gy_close,'r',3.5); %校正前单位阶跃响应 grid;gtext('校正前的'); gtext('校正后的'); figure(2);0 2.3s(1+0.2s)(1+0.15s)G =impulse(Gx_close,'b',3.5); %校正后单位冲激响应 hold onimpulse(Gy_close,'r',3.5); %校正前单位冲激响应 grid;gtext('校正前的'); gtext('校正后的'); figure(3);rlocus(G,GGc); %根轨迹图 grid;gtext('校正前的'); gtext('校正后的');为使校正后系统的根轨迹能经过期望闭环主导极点,其闭环特征方程跟必须满足幅值和相角条件,即πθj j e e M Tp s Tz s Kcs G S Gc 111)(0)(0011=++=-,式中,M 0是校正前系统在1s 处的幅值,θ0是对应的相角。
根轨迹法校正
1 j1.73
按例1,先确定超前网络
c 60 超前角
取 zc 1 ,
得 pc 4
s 1 Gc2 s s4
s1处, 23.8 k* 在
k* k 4 4 1.49
取希望的
k' 5
k' 5 1 3.3 k 1.49
留余量 4 则 0.25
2. 由给定性能指标,确定希望主导 极点(动态性能满足时,希望主导极点 在轨迹上或附近)
* 3. 计算主导极点处增益 k 或需增 大 k 的倍数
4. 计算网络的
值,且留余量
5. 计算zc
s zc G ,构成网络, c s s p c
6. 检验,不满足时,改变余量,重新
设计。
k* 例2:设开环传递函数 Gc s ss 1s 4
s 4.95
s1 处增益 k1* =30.4 在
6. 检验,画根轨迹
1.2 kk 1.84 4 4.95
* 1
k * s 1.2 Gc s Gs ss 1s 4s 4.95
可见:在轨迹 s1, 2 附近。
注意:未校正系统具有距虚轴较近、 开环复数极点时,或系统开环极点 虽均为实数,但过分接近原点,以 及系统具右半平面开环极点时,均 不宜采用串联超前校正。 利用超前校正,其最大超前角 一般取 20 ~ 60
0.5 要求:经校正 t s 10
k 5 1
s
解:1. 画出根轨迹
2. 0.5 ,t s 10 有 n 0.66 s1,2 0.33 0.57 j
可见: s1 在轨迹上或附近,满足动态性能 3. 但在 s1 处的 k * 0.66 0.9 2.66 1.58
控制系统的根轨迹分析与校正
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
在线交流,有问必答
13.1 控制系统的根轨迹法分析
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
在线交流,有问必答
13.1.1 根轨迹及根轨迹法概述
以绘制根轨迹的基本规则为基础的图解 法是获得系统根轨迹是很实用的工程方 法。通过根轨迹可以清楚地反映如下的 信息:
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
zi )
G(s)H (s)
i 1 n
(s p j )
j 1
系统的闭环传递函数为
(s)
G(s)
1 G(s)H (s)
系统的闭环特征方程为1 G(s)H (s) 0
在线交流,有问必答
13.1.2 MATLAB根轨迹分析的相关函数
MATLAB中提供了 rlocus()函数, 可以直接用于系统的根轨迹绘制。 还允许用户交互式地选取根轨迹上 的值。其用法见表13.1。更详细的 用法可见帮助文档
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
在线交流,有问必答
临界稳定时的开环增益;闭环特征
根进入复平面时的临界增益;选定
开环增益后,系统闭环特征根在根
平面上的分布情况;参数变化时,
系统闭环特征根在根平面上的变化 趋势等。
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8.
在线交流,有问必答
例2:若单位反馈控制系统的开环传递函 数为,绘制系统的根轨迹,并据根轨迹 判定系统的稳定性。
根轨迹法校正

西安石油大学课程设计学院:电子工程学院专业:自动化班级:自动化0901学号:题目根轨迹法校正学生指导老师霍爱清二零一零年十二月目录1任务书 (3)2课程设计的题目 (4)3设计思想 (4)4编制的程序及仿真图 (5)(1)求校正装置的放大系数Kc (5)(2)检验原系统的阶跃响应是否满足要求 (5)(3)检验校正装置是否满足要求 (7)5设计结论 (8)6设计总结 (9)7参考文献 (9)1.《自动控制理论I 》课程设计任务书题目根轨迹法校正学生姓名学号专业班级自动化0901设计内容与要求设计内容:4. 已知单位负反馈系统被控对象的开环传递函数为:)12(4)(0+=sssG设计校正环节。
要求使其校正后系统单位斜坡响应稳态误差025.0vess≤;阶跃响应的超调量%15≤σ;相角稳定裕度︒≥45γ;阶跃响应的调节时间sts20≤。
设计要求:(1)编程绘制原系统节约响应曲线,并计算出原系统的动态性能指标;(2)利用SISOTOOL设计校正方案(得到相应的控制其参数);(3)绘制校正后系统阶跃响应曲线,并计算出校正后系统的动态性能指标;(4)整理设计结果,提交设计报告。
起止时间2011 年12 月19 日至2010 年12 月30 日指导教师签名年月日系(教研室)主任签名年月日学生签名年月日2.课程设计的题目:已知单位负反馈系统被控对象的开环传递函数为:)12(4)(0+=s s s G 设计校正环节。
要求使其校正后系统单位斜坡响应稳态误差0025.0v e ss ≤;阶跃响应的超调量%15≤σ;相角稳定裕度︒≥45γ;阶跃响应的调节时间s t s 20≤。
3设计思想:当根轨迹的性能指标给定为时域指标(如超调量、阻尼系数、自然频率等)时,用根轨迹法对系统进行校正比较方便。
这是因为系统的动态性能取决于它的闭环零、极点在S 平面上的分布。
因此,根轨迹法校正的特点就是:如何选择控制的零﹑极点,去促使系统的根轨迹朝有利于提高系统性能的方向变化,从而满足设计要求。
根轨迹法
根軌跡法根軌跡法概述在時域分析中已經看到,控制系統的性能取決於系統的閉環傳遞函數,因此,可以根據系統閉環傳遞函數的零、極點研究控制系統性能。
但對於高階系統,採用解析法求取系統的閉環特征方程根(閉環極點)通常是比較困難的,且當系統某一參數(如開環增益)發生變化時,又需要重新計算,這就給系統分析帶來很大的不便。
1948年,伊万思根据反馈系统中开、死循环传递函数间的内在联系,提出了求解死循环特征方程根的比较简易的图解方法,这种方法称为根轨迹法。
因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。
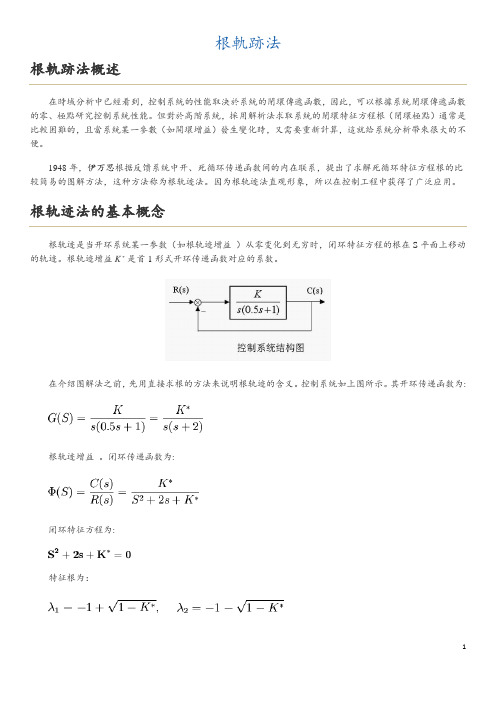
根轨迹法的基本概念根轨迹是当开环系统某一参数(如根轨迹增益)从零变化到无穷时,闭环特征方程的根在S平面上移动的轨迹。
根轨迹增益K * 是首1形式开环传递函数对应的系数。
在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。
控制系统如上图所示。
其开环传递函数为:根轨迹增益。
闭环传递函数为:闭环特征方程为:特征根为:当系统参数K * (或K)从零变化到无穷大时,闭环极点的变化情况见下表:利用计算结果在S平面上描点并用平滑曲线将其连接,便得到K * (或K)从零变化到无穷大时闭环极点在S平面上移动的轨迹,即根轨迹,如下图所示。
图中,根轨迹用粗实线表示,箭头表示K * (或K)增大时两条根轨迹移动的方向。
根轨迹与系统性能依据根轨迹图(见系统根轨迹图),就能分析系统性能随参数(如K * )变化的规律。
1.稳定性开环增益从零变到无穷大时,如系统根轨迹图所示的根轨迹全部落在左半s平面,因此,当K>0时,如图控制系统根所示系统是稳定的;如果系统根轨迹越过虚轴进入右半s平面,则在相应K值下系统是不稳定的;根轨迹与虚轴交点处的K值,就是临界开环增益。
2.稳态性能由系统根轨迹图可见,开环系统在坐标原点有一个极点,系统属于Ⅰ型系统,因而根轨迹上的K值就等于静态误差系数K v。
当r(t)=1(t)时,e ss = 0;当r(t)=t时,3.动态性能由系统根轨迹图可见,当0 <K< 0.5时,闭环特征根为实根,系统呈现过阻尼状态,阶跃响应为单调上升过程;当K=0.5时,闭环特征根为二重实根,系统呈现临界阻尼状态,阶跃响应仍为单调过程,但响应速度较0 <K< 0.5时为快;当K>0.5时,闭环特征根为一对共轭复根,系统呈现欠阻尼状态,阶跃响应为振荡衰减过程,且随K增加,阻尼比减小,超调量增大,但t s基本不变。
用根轨迹法设计相位超前校正网络.
10
例:有一单位反馈控制系统的开环传函为 G( s) 足下列性能指标;
2500k ,要求满 s( s 25)
(1)当输入是一个1 rad s的单位速度函数时,输出的速度函数
与输入速度函数的最终稳态误差不大于0.01rad;
R( s)
Kr s ( s 2)
C (s)
3
解: 2 (1).由 p 20% ,由式 p e 1 可求得 0.46 ,取 0.5 由 ts 3 得 n 6 rad s ; n 得闭环主导极点 A1,2 n jn 1 2 3 j 3 3
(3)根据稳态指标求出系统所需要的误差系数 K(即开环增益 K0); 0 (4)求出系统为了满足稳态性能指标,误差系数需要增加的倍数
1 K0 ,这 个需要增加的倍数由滞后网络的这一对偶极子提 b K
供;
9
(5)选择滞后校正网络的零点 Z c 及极点 Pc ,使满足 Z c Pc 1 ,
原系统的开环传函为:
根轨迹增益为:
Kr
m
G( s) H ( s)
v n
sv (s p j )
j v 1
i 1 n
s
s pj j v 1
m
s zi i 1
开环增益为: K Kr
7
zi
pj j v 1
i 1 n
1 K ( s z ) ( s )b rc i 校正后系统的开环传函为: bT i 1 Gc ( s)G( s) H ( s) n 1 v s (s p j ) (s ) 校正后在A点的根轨迹增益 T j v 1
21 , 3.画水平线 A1B ,作角平分线 AC ,再作 CA D EAC A1D 1 2
第23讲根轨迹法串联校正
L(ω)
认为 0.1c1 1 0.01c1 1 50
GG c
G
在穿越频率处 ,有
20 0
Magnitude (dB)
100 1 c1 (0.1 c1 )
-20
Gc
-50
a) 0
-45 φ(ω)
Gc
-90
G
Phase (deg)
解得 c1 31.6
-135
GG c
-180
校正前的相位裕度为
-225 -270
1)
采用串联滞后校正,使校正后的 k v ≥100,≥45
解: 选择的有源滞后网络应具有如下形式的传递函数
G
c
(s)
K c(T2s 1) (T1s 1)
K c(T2s 1) (hT2s 1)
h T1 2 1 T2 1
取 K c 5 ,则提高增益后的开环传递函数为
G(s)
K
cG
1(s)
s(0.1s
99.5
校正后系统的相位裕度为
180 arctan( 46.3) 90 arctan(0.1 46.3) arctan(46.3) 52.2
21.6
99.5
满足要求。
自动控制原理 5
第六章 自动控制系统的校正
二、串联滞后校正
例6-2
已知开环传递函数为
G1(s)
s(0.1s
20 1)(0.01s
a)
b b)
自动控制原理 2
第六章 自动控制系统的校正
例6-1 已知某控制系统的固有开环传递函数为
G
1(s)
20 s(0.1s
1)
要求校正后满足,k v ≥100 ≥50 试确定校正网络的传递 函数。
根轨迹滞后校正
根轨迹滞后校正系统校正前传递函数为:)2.01)(1.01()(0s s s K s G ++= 由传递函数可知其根轨迹有3条分支,其极点为(0,0),(-10,0),(-5,0),没有零点,其实轴上的主要根轨迹为()()0,5,10,--∞-5035100-=---,渐近线交点为(-5,0) 渐近线与实轴夹角,︒=︒=︒=<︒=︒=︒=≥240,120,0,0300,180,60,0210210θθθθθθk k将ωj s =代入系统特征方程得:)02.0(3.0)(32ωωωω-+-=j K j D令其实部为零,解得:0,07.7-,07.7=ω,K=15,故与虚轴交点为(0,7.07),(0,-7.07)和(0,0)0101511=++++d d d 解得:89.7,11.221-=-=d d (舍去)在matlab 的命令窗口中输入的程序为:n=1;d=[0.02,0.3,1,0];rlocus(n,d)校正后系统传递函数为)67.821)(2.01)(1.01()31.21()()(0s s s s s K s G s G c ++++= 由传递函数可知其根轨迹有3条分支,其极点为(0,0),(-10,0),(-5,0),(-0.012,0)零点为(-0.43,0),其实轴上的主要根轨迹为()())0,012.0(,43.0,5,10,----∞-86.414)43.0()012.05100(-=------,渐近线交点为(-4.86,0) 渐近线与实轴夹角,︒=︒=︒=<︒=︒=︒=≥240,120,0,0300,180,60,0210210θθθθθθk k将ωj s =代入系统特征方程得:)82.2498.84(297.8265.1)(324ωωωωω-++-=K j K j D令其实部虚部都为零,解得:57.14,006.7-,06.7==K 或ω,故与虚轴交点为(0,7.06),(0,-7.06)和(0,0)43.01012.01101511+=++++++d d d d d 解得:(舍去)舍去81.7,66.1,11.1),(006.04321-=-=-=-=d d d d在matlab 的命令窗口中输入的程序为: n=[2.31,1];d=[1.65,24.82,82.97,1,0]; rlocus(n,d)系统以校正和未校正的单位阶跃响应曲线如下校正前校正后。
第13章 控制系统的根轨迹分析与校正
rlocus(G) rlocus(G1,G2,...) rlocus(G,k) [r,k] = rlocus(G) r = rlocus(G,k)
绘制指定系统的根轨迹 绘制指定系统的根轨迹。多个系统绘于同 一图上 绘制指定系统的根轨迹。K为给定增益向 量 返回根轨迹参数。r为复根位置矩阵。r有 length(k)列,每列对应增益的闭环根 返回指定增益k的根轨迹参数。r为复根位 置矩阵。r有length(k)列,每列对应增 益的闭环根 MATLAB与控制系统仿真实践,
*
(s z )
i i 1 j
m
(s p
j 1
n
)
系统的闭环传递函数为
G(s) ( s) 1 G( s) H ( s)
系统的闭环特征方程为 1 G( s) H ( s) 即 G( s) H ( s)
K * (s zi )
i 1 m
0
(s p
j 1
例2:若单位反馈控制系统的开环传递函 数为,绘制系统的根轨迹,并据根轨迹 判定系统的稳定性。
MATLAB与控制系统仿真实践, 北京航空航天大学出版社,2009.8. 在线交流,有问必答
num=[1 3]; den=conv([1 1],[1 2 0]); G=tf(num,den); rlocus(G) figure(2) %新开一个图形窗口 Kg=4; G0=feedback(tf(Kg*num,den),1); step(G0)
北京航空航天大学出版社,2009.8. 在线交流,有问必答
图13.6 例3系统时的阶跃响 应
例4:若单位反馈控制系统的开环传递函数为
Gk ( s)
Kg s( s 2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在根轨迹校正法中,当系统的动态性能不足时,通常选择什么形式的串联校正网络?网络参数取值与校正效果之间有什么关系?工程应用时应该注意什么问题?
(1)可以采用的校正装置的形式为
单零点校正:)()(c c c z s k s G +=,零点c z -在s 平面的负实轴上;
零极点校正:)()()
()(c c c c c c z p p s z s K s G >++=,零极点均在负实轴上,零点比极点靠近原
点(即:超前校正)。
(2)零点越靠近原点、极点越远离原点校正作用越强。
(3)在工程应用时,应考虑校正装置的可实施性,零极点分布最好在左半平面的中部,因为零点太靠近原点,微分作用太强,可能使执行机构进入饱和状态而达不到预期的效果。
在根轨迹校正法中,当系统的静态性能不足时,通常选择什么形式的串联校正网络?网络参数取值与校正效果之间有什么关系?工程应用时应该注意什么问题? (1)校正装置的形式为)()
()()(c c c c c c p z p s z s K s G >++=,即滞后校正装置。
零极点均在负实轴上,零极点非常靠近虚轴,且与受控对象的其他零极点相比可以构成一对偶极子。
由于增加一对偶极子基本不改变系统的动态性能,但可以增大系统的开环增益,从而达到减小系统静态误差的目的。
(2)零极点之比c c p z 的取值越大,系统开环增益增加幅度越大,因为校正后的开环增益是校正前开环增益的c c p z 倍。
(3)在工程实施时,考虑到系统的稳定性,极点不能太靠近原点。