1 根轨迹法超前校正
根轨迹法校正设计
1 根轨迹法校正设计如果设计指标是时域特征量,应采用时域校正方法,即将设计指标转换为对闭环主导极点位置的设计,常称为根轨迹法。
设计过程中,不必绘制根轨迹图。
根轨迹法同频率分析法一样也可以有串联超前校正、串联滞后校正和串联滞后-超前校正,因“超前”和“滞后”是频域中的概念,在根轨迹法中不使用。
基本概念: ⑴ 动态性能校正使开环增益满足设计要求。
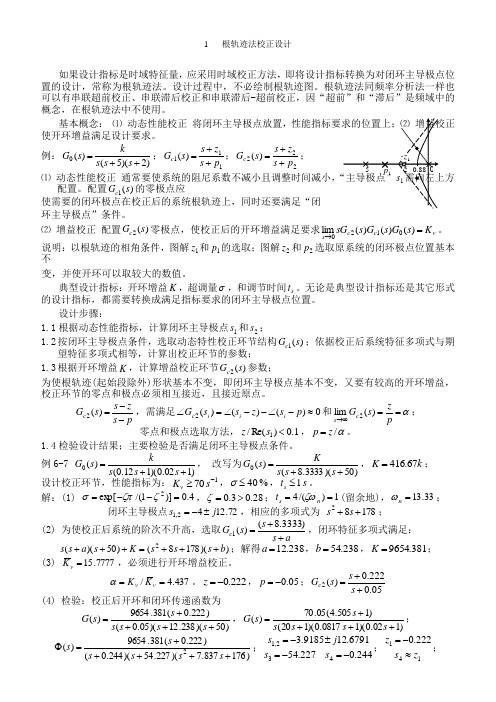
例:)2)(5()(0++=s s s k s G ;111)(p s z s s G c ++=;222)(p s z s s G c ++=; ⑴ 动态性能校正 配置。
配置)(1s G c 的零极点应使需要的闭环极点在校正后的系统根轨迹上,同时还要满足“闭环主导极点”条件。
⑵ 增益校正 配置)(2s G c 零极点,使校正后的开环增益满足要求v c c s K s G s G s sG =→)()()(lim 0120。
说明:以根轨迹的相角条件,图解1z 和1p 的选取;图解2z 和2p 选取原系统的闭环极点位置基本不变,并使开环可以取较大的数值。
典型设计指标:开环增益K ,超调量σ,和调节时间s t 。
无论是典型设计指标还是其它形式的设计指标,都需要转换成满足指标要求的闭环主导极点位置。
设计步骤:1.1 根据动态性能指标,计算闭环主导极点1s 和2s ;1.2 按闭环主导极点条件,选取动态特性校正环节结构)(1s G c ;依据校正后系统特征多项式与期望特征多项式相等,计算出校正环节的参数;1.3 根据开环增益K ,计算增益校正环节)(2s G c 参数;为使根轨迹(起始段除外)形状基本不变,即闭环主导极点基本不变,又要有较高的开环增益,校正环节的零点和极点必须相互接近,且接近原点。
p s z s s G c --=)(2,需满足0)()()(2≈-∠--∠=∠p s z s s G i i i c 和α==∞→pz s G c s )(lim 2; 零点和极点选取方法,1.0)Re(/1<s z ,α/z p =。
控制系统校正的根轨迹方法

控制系统校正的根轨迹方法用根轨迹法进行校正的基础,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S 平面上通过希望的闭环极点。
根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。
应用根轨迹进行校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。
在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。
等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳定性。
在开环传递函数中增加零点,可以使根轨迹向左方移动,从而提高系统的相对稳定性,减小系统调节时间。
等同于微分控制,相当于给系统前向通道中增加了零点,因此增加了系统的超调量,并且加快了瞬态响应。
根轨迹超前校正计算步骤如下。
(1)作原系统根轨迹图;(2)根据动态性能指标,确定主导极点i s 在S 平面上的正确位置; 如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3)在新的主导极点上,由幅角条件计算所需补偿的相角差φ; 计算公式为:is s=︒±=(s)][G arg -180o ϕ (1)此相角差φ表明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件。
(4)根据相角差φ,确定微分校正装置的零极点位置; 微分校正装置的传递函数为:11++=sTp sTz KcGc (2)例题:已知系统开环传递函数: 试设计超前校正环节,使其校正后系统的静态速度误差系数Kv ≤4.6,闭环主导极点满足阻尼比ζ=0.2,自然振荡角频率ωn=12.0rad/s ,并绘制校正前后系统的单位阶跃响应曲线、单位脉冲响应曲线和根轨迹。
解: 由6.4)(*)(0*lim 0==→s Gc s G s Kv s 得kc=2计算串联超前校正环节的matlab 程序如下: 主函数: close; num=2.3;den=conv([1,0],conv([0.2,1],[0.15,1])); G=tf(num,den) %校正前系统开环传函 zata=0.2;wn=12.0; %要求参数 [num,den]=ord2(wn,zata); %追加系统动态特性 s=roots(den); s1=s(1);kc=2; %增益kc Gc=cqjz_root(G,s1,kc)GGc=G*Gc*kc %校正后系统开环传函 Gy_close=feedback(G,1) %校正前系统闭环传函 Gx_close=feedback(GGc,1) %校正后系统闭环传函 figure(1);step(Gx_close,'b',3.5); %校正后单位阶跃响应 hold onstep(Gy_close,'r',3.5); %校正前单位阶跃响应 grid;gtext('校正前的'); gtext('校正后的'); figure(2);0 2.3s(1+0.2s)(1+0.15s)G =impulse(Gx_close,'b',3.5); %校正后单位冲激响应 hold onimpulse(Gy_close,'r',3.5); %校正前单位冲激响应 grid;gtext('校正前的'); gtext('校正后的'); figure(3);rlocus(G,GGc); %根轨迹图 grid;gtext('校正前的'); gtext('校正后的');为使校正后系统的根轨迹能经过期望闭环主导极点,其闭环特征方程跟必须满足幅值和相角条件,即πθj j e e M Tp s Tz s Kcs G S Gc 111)(0)(0011=++=-,式中,M 0是校正前系统在1s 处的幅值,θ0是对应的相角。
控制系统的根轨迹分析与校正

程序如下:
clf;
num=1;
den=conv([1 1 0],[1 5]);
rlocus(num,den) %绘制根轨迹
axis([-8 8 -8 8])
figure(2)
r=rlocus(num,den); %返回根轨迹参数
plot(r,'-')
%绘制根轨迹
axis([-8 8 -8 8])
gtext('x')
在线交流,有问必答
Amplitude Amplitude
Step Response 1.8
1.6 System: G0
Peak amplitude: 1.64
1.4
Overshoot (%): 64.4
At time (sec): 1.44
1.2
1
0.8
0.6
0.4
0.2
0
0
5
10
15
20
Time (sec)
在线交流,有问必答
开环传递函数可表示为,
m
K * (s zi )
G(s)H (s)
i 1 n
(s p j )
j 1
系统的闭环传递函数为 (s)
G(s)
1G(s)H(s)
系统的闭环特征方程为 1G (s)H(s)0
m
K * ( s z i )
即
G(s)H(s) i1 n
1 式(4-8)
北京航空航天大学出版社,2009.8.
在线交流,有问必答
第25页,此课件共85页哦
Imaginary Axis
Root Locus 15
10
5
0
-5
根轨迹法校正
1 j1.73
按例1,先确定超前网络
c 60 超前角
取 zc 1 ,
得 pc 4
s 1 Gc2 s s4
s1处, 23.8 k* 在
k* k 4 4 1.49
取希望的
k' 5
k' 5 1 3.3 k 1.49
留余量 4 则 0.25
2. 由给定性能指标,确定希望主导 极点(动态性能满足时,希望主导极点 在轨迹上或附近)
* 3. 计算主导极点处增益 k 或需增 大 k 的倍数
4. 计算网络的
值,且留余量
5. 计算zc
s zc G ,构成网络, c s s p c
6. 检验,不满足时,改变余量,重新
设计。
k* 例2:设开环传递函数 Gc s ss 1s 4
s 4.95
s1 处增益 k1* =30.4 在
6. 检验,画根轨迹
1.2 kk 1.84 4 4.95
* 1
k * s 1.2 Gc s Gs ss 1s 4s 4.95
可见:在轨迹 s1, 2 附近。
注意:未校正系统具有距虚轴较近、 开环复数极点时,或系统开环极点 虽均为实数,但过分接近原点,以 及系统具右半平面开环极点时,均 不宜采用串联超前校正。 利用超前校正,其最大超前角 一般取 20 ~ 60
0.5 要求:经校正 t s 10
k 5 1
s
解:1. 画出根轨迹
2. 0.5 ,t s 10 有 n 0.66 s1,2 0.33 0.57 j
可见: s1 在轨迹上或附近,满足动态性能 3. 但在 s1 处的 k * 0.66 0.9 2.66 1.58
用根轨迹法设计相位超前校正网络.
10
例:有一单位反馈控制系统的开环传函为 G( s) 足下列性能指标;
2500k ,要求满 s( s 25)
(1)当输入是一个1 rad s的单位速度函数时,输出的速度函数
与输入速度函数的最终稳态误差不大于0.01rad;
R( s)
Kr s ( s 2)
C (s)
3
解: 2 (1).由 p 20% ,由式 p e 1 可求得 0.46 ,取 0.5 由 ts 3 得 n 6 rad s ; n 得闭环主导极点 A1,2 n jn 1 2 3 j 3 3
(3)根据稳态指标求出系统所需要的误差系数 K(即开环增益 K0); 0 (4)求出系统为了满足稳态性能指标,误差系数需要增加的倍数
1 K0 ,这 个需要增加的倍数由滞后网络的这一对偶极子提 b K
供;
9
(5)选择滞后校正网络的零点 Z c 及极点 Pc ,使满足 Z c Pc 1 ,
原系统的开环传函为:
根轨迹增益为:
Kr
m
G( s) H ( s)
v n
sv (s p j )
j v 1
i 1 n
s
s pj j v 1
m
s zi i 1
开环增益为: K Kr
7
zi
pj j v 1
i 1 n
1 K ( s z ) ( s )b rc i 校正后系统的开环传函为: bT i 1 Gc ( s)G( s) H ( s) n 1 v s (s p j ) (s ) 校正后在A点的根轨迹增益 T j v 1
21 , 3.画水平线 A1B ,作角平分线 AC ,再作 CA D EAC A1D 1 2
基于根轨迹法的串联超前校正器的设计

基于根轨迹法的串联超前校正器的设计
张白莉
【期刊名称】《长春师范学院学报(自然科学版)》
【年(卷),期】2012(031)003
【摘要】本文提出了用几何法与根轨迹法结合起来设计串联超前校正装置的计算方法。
利用该方法直接可以得到比较精确的校正装置参数,而不需要经过多次凑试,简便有效。
在MATLAB环境下进行实例仿真,验证了该方法的准确性。
%In this paper, a calculation method of series leading corrector that combine geometric method with root locus is proposed. Precise parameters could be obtained by the method without repeated trying. The simulation result in MATLAB showed that the method was effective and utility.
【总页数】4页(P63-66)
【作者】张白莉
【作者单位】忻州师范学院物理电子系,山西忻州034000
【正文语种】中文
【中图分类】TN713
【相关文献】
1.基于根轨迹法的滞后-超前补偿器的计算机辅助设计 [J], 李钟慎
2.基于根轨迹法与串联PID法的激光操作控制系统设计 [J], 吴剑威;唐立新
3.基于MATLAB的串联超前校正器设计 [J], 刘姜涛
4.超前校正器的根轨迹法设计及其MATLAB实现 [J], 李钟慎
5.基于根轨迹法的串联超前校正器的设计 [J], 张白莉;
因版权原因,仅展示原文概要,查看原文内容请购买。
控制系统校正的根轨迹方法
控制系统校正的根轨迹方法用根轨迹法进展校正的根底,是通过在系统开环传递函数中增加零点和极点以改变根轨迹的形状,从而使系统根轨迹在S 平面上通过希望的闭环极点。
根轨迹法校正的特征是基于闭环系统具有一对主导闭环极点,当然,零点和附加的极点会影响响应特性。
应用根轨迹进展校正,实质上是通过采用校正装置改变根轨迹的,从而将一对主导闭环极点配置到期望的位置上。
在开环传递函数中增加极点,可以使根轨迹向右方移动,从而降低系统的相对稳定性,增大系统调节时间。
等同于积分控制,相当于给系统增加了位于原点的极点,因此降低了系统的稳定性。
在开环传递函数中增加零点,可以使根轨迹向左方移动,从而提高系统的相对稳定性,减小系统调节时间。
等同于微分控制,相当于给系统前向通道中增加了零点,因此增加了系统的超调量,并且加快了瞬态响应。
根轨迹超前校正计算步骤如下。
(1)作原系统根轨迹图;(2)根据动态性能指标,确定主导极点i s 在S 平面上的正确位置;如果主导极点位于原系统根轨迹的左边,可确定采用微分校正,使原系统根轨迹左移,过主导极点。
(3)在新的主导极点上,由幅角条件计算所需补偿的相角差φ; 计算公式为:is s=︒±=(s)][G arg -180o ϕ (1)此相角差φ说明原根轨迹不过主导极点。
为了使得根轨迹能够通过该点,必须校正装置,使补偿后的系统满足幅角条件。
(4)根据相角差φ,确定微分校正装置的零极点位置; 微分校正装置的传递函数为:11++=sTp sTz KcGc (2)例题:系统开环传递函数:试设计超前校正环节,使其校正后系统的静态速度误差系数Kv ≤4.6,闭环主导极点满足阻尼比ζ=0.2,自然振荡角频率ωn=12.0rad/s ,并绘制校正前后系统的单位阶跃响应曲线、单位脉冲响应曲线和根轨迹。
解:由6.4)(*)(0*lim 0==→s Gc s G s Kv s 得kc=2计算串联超前校正环节的matlab 程序如下: 主函数: close; num=2.3;den=conv([1,0],conv([0.2,1],[0.15,1]));G=tf(num,den) %校正前系统开环传函 zata=0.2;wn=12.0; %要求参数 [num,den]=ord2(wn,zata); %追加系统动态特性 s=roots(den); s1=s(1);kc=2; %增益kc Gc=cqjz_root(G,s1,kc)GGc=G*Gc*kc %校正后系统开环传函 Gy_close=feedback(G,1) %校正前系统闭环传函 Gx_close=feedback(GGc,1) %校正后系统闭环传函 figure(1);step(Gx_close,'b',3.5); %校正后单位阶跃响应 hold onstep(Gy_close,'r',3.5); %校正前单位阶跃响应 grid;gtext('校正前的'); gtext('校正后的'); figure(2);0 2.3s(1+0.2s)(1+0.15s)G =impulse(Gx_close,'b',3.5); %校正后单位冲激响应 hold onimpulse(Gy_close,'r',3.5); %校正前单位冲激响应 grid;gtext('校正前的'); gtext('校正后的'); figure(3);rlocus(G,GGc); %根轨迹图 grid;gtext('校正前的'); gtext('校正后的');为使校正后系统的根轨迹能经过期望闭环主导极点,其闭环特征方程跟必须满足幅值和相角条件,即πθj j e e M Tp s Tz s Kcs G S Gc 111)(0)(0011=++=-,式中,M 0是校正前系统在1s 处的幅值,θ0是对应的相角。
基于根轨迹法的超前滞后校正
基于根轨迹法的超前-滞后校正超前校正的根轨迹设计法。
滞后环节的根轨迹设计方式超前滞后校正的根轨迹设计法。
1.1.1大体概念1.根轨迹根轨迹是指系统的增益K由零到正无穷大时的闭环特征方城的根在s平面上的转变的轨迹。
在系统的增益K由零转变到负无穷大时闭环特征方程的根的轨迹为补根轨迹。
系统闭环特征方程的根轨迹与补根轨迹称为全根轨迹。
通常情形下根轨迹时指增益K由零到正无穷大下的根的轨迹。
2.超前校正的根轨迹设计法。
基于根轨迹的超前校正设计是通过串联超前校正环节,即增加开环极点和零点,对原来的根轨迹进行调整,取得所需的根轨迹。
通常常利用解析法取得超前校正环节。
设校正环节的传递函数为:sT Z+1G C(s)=K C一一一一――sT P+1解析法的设计步骤如下:(1)按照所需闭环系统稳态误差和瞬态特性,肯定闭环极点s1,并设定校正环节的增益K C;(2)按照闭环特征方程的幅值和相位角条件,应该知足如下条件:s1T Z+1G C(s1)G(s1)=K C―――――M G E^-jӨG=1E^jπs1T P+1式中,Mg是开环系统G在s1的幅值,ӨG是开环系统G在s1的相位角。
(3)设s1表示为s1=M S E^-jӨS,则有1E^jπM S E^-jӨsTz+1= ――――――[M S E^-jӨS T P+1]K C M G E^-jӨG(4)上述方程分解为实部和虚部两个方程,取得有两个未知数的两个方程,其解为sinӨS-K C M G sin(ӨG-ӨS) K C M G sinӨS+sin(ӨG+ӨS)T Z=―――――――――――;T P=――――――――――――K C M G sinӨG M S sinӨG(5) 按照T Z, T P,K C取得超前校正环节的传递函数G C(s);(6) 检查闭环系统的其它性能指标是不是知足要求,若是不知足,则改变K C,从头计算。
例如:已知燃油调节控制系统的开环传递函数为2G P(s)=――――――――s(1+(1+试设计超前校正环节,使其校正后系统静态速度误差系数小于K V=10,闭环主导极点知足阻尼比ζ=和自然频率Wn=s。
基于根轨迹的相位超前校正装置的解析方法
2014~ 2015学年第二学期《控制系统仿真与CAD》题目:基于根轨迹的相位超前校正装置解析方法专业:电气工程及其自动化班级:12电气工程及其自动化2班姓名:张鹏指导教师:潘慧慧电气工程学院2015年6月2日基于根轨迹的相位超前校正装置的解析方法已知单位反馈控制系统的开环传递函数为Go(s )=5/s(0.2s+1)( 0.5s+1), 试设计超前校正装置,使系统满足:最大超调量σ%≤30%;调整时间ts≤0.8s ;系统单位斜坡响应稳态误差ess≤0.1。
n1=50;d1=conv(conv([1 0],[1 2]),[1 5]);g0=tf(n1,d1)g0=tf(n1,d1)s1=-4.3755+11.4157i;kc=2;n0=2;d0=conv(conv([1 0],[0.5 1]),[0.2 1]);ng0v=polyval(n0,s1);dg0v=polyval(d0,s1);gs1=ng0v/dg0v;m0=abs(gs1),phi0=angle(gs1),ms=abs(s1),phis=angle(s1), m0 =0.0123phi0 =1.0543ms =12.2255phis =1.9368Tz=(sin(phis)-kc*m0*sin(phi0-phis))/(kc*m0*ms*sin(phi0)), Tz =3.651Tp=-(kc*m0*sin(phis)+sin(phi0+phis))/(ms*sin(phi0)),Tp =-0.0163gc=tf([Tz 1],[Tp 1]),Transfer function:-3.652 s - 1-------------0.01626 s - 1。
一种基于根轨迹串联超前校正的计算方法
统 的动态性能指标 可 由靠 近虚轴 的一对共 轭闭环 主导极点 来表征 , 因此 , 可把对 系统提 出的时域 性能 指标 的要 求转化 为一对期望闭环 主导极 点。 定这 对 闭环 主导极 点 的位置 确 后, 首先根据绘制根轨迹的相 角条件判 断一下它们是否位于
故据是要估算和试凑的。而在根轨迹法 校正 当中, 献 虽 文
凑 出了系统闭环主导极 点到所 附加 负实数 开环零 点和到 算 厅村加负实数开环极点 两直线 间的夹角 , _I 但夹 角定 了, 上述 酉 直线 的具体 位置 还是 不能 唯一确 定 , 仍要 进行 试凑 和核
。
u
:
I
:
:
l
: 、 /, \
一
一
∞
1
“
Ⅱ
能否给出一种完全不用试凑的定量计算方法呢? 本文把解析几何与根轨迹法相结合 , 出了一种实现串 给
图 l 超 前 校 正 装 置 对 数 频 率特 性
示。 因为 n>l 所以超前校正装置的负实数极点 P , =一1 T / 总在负实数零点 =一ln / 之左 , 两者之 间的距离 由分度系 数 n决定 , 改变参数 n和 , 其零极点 可在 平 面的负实 轴上
维普资讯
第3 l卷第 6期
20 0 7年 l 2月
南昌大学学报 ( 理科版 )
Jun l f a c a gU i r t ( a rl c n e o r a o N n h n nv sy N t a S i c ) ei u e
摘
要: 提出了一种把解析几何与根轨迹法结合起来实现 串联超前校正 计算方法 , 无需精确绘 图和繁琐 的试 凑运
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验8 系统校正设计:根轨迹法超前校正
一.实验目的
对于给定的控制系统,采用根轨迹法设计满足时域性能指标的超前校正装置,并通过仿真结果验证设计的正确性。
二.实验步骤
1. 在Windows界面上用鼠标双击matlab图标,即可打开MATLAB命令平台。
2. 键入命令simulink,打开结构图设计界面。
3. 建立时域仿真的结构图文件“mysimu.m”。
给定结构图如图20所示
图20 SIMULINK仿真结构图
4.结构图单元参数设置。
用鼠标器双击任何一个结构图单元即激活结构图单元的参数设置窗口,完成结构图单元的参数设置。
5.仿真参数设置。
用鼠标选择主菜单的“Simulation”选项,选择“Simulation Parameter”选项,打开仿真参数设置窗口,完成仿真参数设置。
6.仿真操作。
选中“simulation”菜单项中的选项“start”即启动系统的仿真。
(或者使用工具栏上的启动按钮。
)
三.实验要求
1. 作原系统的根轨迹图。
numo=[10];deno=[0.5 1 0]; rlocus(numo,deno);
2. 求出闭环极点的位置,计算时域性能M p0和t s0。
numo=[10];deno=[0.5 1 0];
[numc,denc]=cloop(numo,deno,-1);
printsys(numc,denc);
pzmap(numc,denc);
用于在s 平面上作图,作出零点.极点的位置如图21所示。
[p,z]=pzmap(numc,denc);
图21开环极点用于求得零点.极点的值。
p
p =
-1.0000 + 4.3589i
-1.0000 - 4.3589i
z
z =
[]
3. 作时域仿真。
sysc=tf(numc,denc);step(sysc)
求出阶跃响应曲线,记录未校正系统的时域性能指标M p0和t s0;
4.按照根轨迹法超前校正设计步骤,设计超前校正装置G c (s),实现希望的时域性能指标为
M p <15%
t s <1.5s
k v>20
5.按照超前校正装置G c (s)的参数,修改结构图的校正单元参数,进行新的时域仿真,作出阶跃响应曲线,记录校正后系统的时域性能指标Mp和ts。
三.实验结果分析
1.分析根轨迹法超前校正的特点;
2.超前校正装置的零.极点对于原系统根轨迹的影响;
3.根轨迹法超前校正对系统稳态性能的影响。