计算机图形学第六章
计算机图形学智慧树知到答案章节测试2023年中国地质大学(武汉)

第一章测试1.计算机图形学产生图形,计算机图像学产生图像。
()A:对B:错答案:B2.下列哪项不属于计算机图形学的应用领域?()A:虚拟现实B:游戏实时显示C:科学计算可视化D:计算机辅助设计E:数字电影制作F:识别图片中的动物答案:F3.本课程将讲不讲解以下哪个内容?()A:动画生成B:真实感图像生成C:曲线生成D:游戏制作答案:D4.使用OPENGL画带颜色的直线,需要调用不同的函数,分别指定颜色和起始点坐标。
()A:错B:对答案:B5.在OPENGL中定义的结点仅包含位置信息。
()A:对B:错答案:B第二章测试1.四面体的表面建模中,可用四个三角形来描述四面体的表面,每个三角形包含三个点,因此,四面体中点的总个数为()。
A:12B:6C:4D:9答案:C2.三次BEZIER曲线有几个控制点?()A:3B:5C:4D:6答案:C3.三次BEZIER曲线经过几个控制点?()A:3B:4C:2D:1答案:C4.不经过Y轴的斜线绕Y轴旋转得到的曲面是()A:半球面B:球面C:柱面D:圆台面答案:B5.BEZIER曲线上的所有点都是由控制点经过插值得到的。
()A:错B:对答案:A第三章测试1.通过变换可以将单位圆变成长半轴2短轴0.5的椭圆,具体实施步骤是()。
A:水平方向做平移变换,竖值方向做平移变换B:水平方向做拉伸变换,竖值方向做平移变换C:水平方向做收缩变换,竖值方向做拉伸变换D:水平方向做拉伸变换,竖值方向做收缩变换答案:B2.变换前后二线夹角保持不变的保角变换有()A:镜像B:旋转C:平移D:缩放答案:D3.水平方向的剪切变换,如果表达为x’=ax+by y’=c x+dy,则有()。
A:b=1,c=1,d=0B:a=0,b=1,c=1C:a=1,b=0,d=1D:a=1,c=0,d=1答案:D4.正交变换不包括()。
A:剪切B:镜像C:旋转D:平移答案:A5.变换的复合运算不满足交换律。
《计算机图形学》课件第六章
(2) 两点透视。投影平面和二个坐标轴相交, 即投影 平面与一个坐标轴平行。 所生成的物体投影图具有较好 的真实性, 比较容易构造。 常用于建筑工程、 工业设计和
(3) 三点透视。投影平面和三个坐标轴相交, 这类透 视投影的构造比两点透视难一些, 用的较少。
6.2.2 透视投影的确定
令 z′=0, 得
(1) 绕 z 轴旋转-θ2角, 其变换矩阵为: (6.14)
(2) 绕y轴旋转-θ1角, 其变换矩阵为: (6.15)
(3) 绕 z 轴旋转θ角, 其变换矩阵为: (6.16)
(4) 绕y轴旋转θ1角, 其变换矩阵为: (6.17)
(5) 绕 z 轴旋转θ2角, 其变换矩阵为: (6.18)
(6.38)
oz 轴的单位方向向量为 而 ox 轴的方向和向量U×N一致, 所以
(6.39) (6.40)
根据右手规则, oy 轴的单位方向向量为
(6.41) 从而, 从用户坐标系到观察坐标系的坐标变换公式是
(6.42)
写成齐次坐标表示, 则有 其中
(6.43) (6.44)
3. 设透视中心C在用户坐标系oxyz中的坐标为(xc, yc, zc), 那么由式(6.43)可知, C在观察坐标系中的坐标 (xc,yc,zc)确定式为
(6.32)
其中A、 B为常数。 显然, 射影变换把三维空间的直线也变 成了直线。
6.2.3 平行投影及其分类
1. (1) 正投影。 投影平面垂直于某一坐标轴, 因此, 该坐标轴方向就是投影方向。 最常见的正投影有六种: 前 (主)视图、 后视图、 左(侧)视图、 右视图、 顶(俯)视图、 底(仰)视图, 工程制图中常用前视图、 侧视图和顶视图三 种。 正投影能较好地描述物体的一个面, 但却丢失了物体 的许多三维信息, 即使使用所有的六种正视图, 有时也难 以重构该物体的三维结构。
计算机图形学教案
计算机图形学教案第一章:计算机图形学概述1.1 课程介绍计算机图形学的定义计算机图形学的发展历程计算机图形学的应用领域1.2 图形与图像的区别图像的定义图形的定义图形与图像的联系与区别1.3 计算机图形学的基本概念像素与分辨率矢量与栅格颜色模型图像文件格式第二章:二维图形基础2.1 基本绘图函数画点函数画线函数填充函数2.2 图形变换平移变换旋转变换缩放变换2.3 图形裁剪矩形裁剪贝塞尔曲线裁剪多边形裁剪第三章:三维图形基础3.1 基本三维绘图函数画点函数画线函数填充函数3.2 三维变换平移变换旋转变换缩放变换3.3 光照与材质基本光照模型材质的定义与属性光照与材质的实现第四章:图像处理基础4.1 图像处理基本概念像素的定义与操作图像的表示与存储图像的数字化4.2 图像增强对比度增强锐化滤波4.3 图像分割阈值分割区域生长边缘检测第五章:计算机动画基础5.1 动画基本概念动画的定义与分类动画的基本原理动画的制作流程5.2 关键帧动画关键帧的定义与作用关键帧动画的制作方法关键帧动画的插值算法5.3 骨骼动画骨骼的定义与作用骨骼动画的制作方法骨骼动画的插值算法第六章:虚拟现实与增强现实6.1 虚拟现实基本概念虚拟现实的定义与分类虚拟现实技术的关键组件虚拟现实技术的应用领域6.2 虚拟现实实现技术头戴式显示器(HMD)位置追踪与运动捕捉交互设备与手势识别6.3 增强现实基本概念与实现增强现实的定义与原理增强现实技术的应用领域增强现实设备的介绍第七章:计算机图形学与人类视觉7.1 人类视觉系统基本原理视觉感知的基本过程人类视觉的特性和局限性视觉注意和视觉习惯7.2 计算机图形学中的视觉感知视觉感知在计算机图形学中的应用视觉线索和视觉引导视觉感知与图形界面设计7.3 图形学中的视觉错误与解决方案常见视觉错误分析避免视觉错误的方法提高图形可读性与美观性第八章:计算机图形学与艺术8.1 计算机图形学在艺术创作中的应用数字艺术与计算机图形学的交融计算机图形学工具在艺术创作中的使用计算机图形学与艺术的创新实践8.2 计算机图形学与数字绘画数字绘画的基本概念与工具数字绘画技巧与风格数字绘画作品的创作与展示8.3 计算机图形学与动画电影动画电影制作中的计算机图形学技术3D动画技术与特效制作动画电影的视觉艺术表现第九章:计算机图形学的未来发展9.1 新兴图形学技术的发展趋势实时图形渲染技术基于物理的渲染动态图形设计9.2 计算机图形学与其他领域的融合计算机图形学与的结合计算机图形学与物联网的结合计算机图形学与生物医学的结合9.3 计算机图形学教育的未来发展图形学教育的重要性图形学教育的发展方向图形学教育资源的整合与创新第十章:综合项目实践10.1 项目设计概述项目目标与需求分析项目实施流程与时间规划项目团队组织与管理10.2 项目实施与技术细节项目技术选型与工具使用项目开发过程中的关键技术项目测试与优化10.3 项目成果展示与评价项目成果的展示与推广项目成果的评价与反馈重点和难点解析一、图像的定义与图像的定义,图形与图像的联系与区别1. 学生是否能够理解并区分图像和图形的概念。
计算机图形学习题参考答案(完整版)
区域二(下半部分)
k (x k, yk) pk 0 (7, 3) b 2(x 0 1/2)2 a 2(y01)2a 2b 2 23 1 (8, 2) p02a 2y1a 22b 2x1 361 2 (8,1) p12a 2y2 a 2 297 3 (8, 0)
2a yk pk 2 2 2 1600 b a b (1/4)a 332 768 p0 2b2x1b2 224 768 p12b 2x 2 b 2 44 768 p2 2b 2x 3 b2 208 2 640 p3 2b x 4 b 22a 2y 4 108 640 p4 2b 2x 5 b 2 288 512 p5 2b 2x 6 b 22a 2y6 244 384
10、使用中点椭圆算法,绘制中心为 (0, 0) ,长半径 a 8 ,短半径 b 6 的椭圆在第一象限中的部分。 解: 区域一(上半部分)
k (x k, yk) 2b x k 0 (0, 8) 0 1 (1, 8) 72 2 (2, 8) 144 3 (3, 8) 216 4 (4, 7) 288 5 (5, 7) 360 6 (6, 6) 432 7 (7, 6) 504 8 8, 5
第 2 章 基本图元的显示
1、假设 RGB 光栅系统的设计采用 810 英寸的屏幕,每个方向的分辨率为每英寸 100 个像素。如果 每个像素 6 位,存放在帧缓冲器中,则帧缓冲器需要多大存储容量(字节数)? 解: 8100101006/8600000 (字节) 。 2、假设计算机字长为 32 位,传输速率为 1 MIP(每秒百万条指令) 。300 DPI(每英寸点数)的激光打 印机,页面大小为 8.511 英寸,要填满帧缓冲器需要多长时间。 解:
2
11、已知: A(0, 0) 、 B(1, 1) 、 C(2, 0) 、 D(1, 2) ,请判断多边形 ABCD 是否是凹多边形。 解: 多 边 形 的 边 向 量 为 AB (1,1, 0) , BC (1, 1, 0) , CD (1, 2, 0) , DA(1, 2, 0) 。 因 为
计算机图形学_完整版 ppt课件
发展趋势:与信息技术、大数据、人工智能等新兴 技术相结合,推动健康服务与管理的智能化、精细 化发展
专业定位与目标
定位:培养具备公共管理、健康服务与管理专业 知识和技能的人才
目标:提高公共管理水平,促进健康服务与管理 领域的发展
培养目标:具备公共管理、健康服务与管理专业 知识和技能,能够从事相关工作的人才
04
健康服务与管理专业能够促 进医疗资源的合理配置和利 用
2
专业课程设置
核心课程
公共管理学
卫生信息管理
卫生服务人力 资源管理
卫生服务领导 力
健康服务与管 理
卫生服务营销
卫生服务财务 管理
卫生服务创新 与变革
卫生经济学
卫生服务组织 与管理
卫生服务战略 管理
卫生服务研究 方法
卫生政策与法 规
卫生服务评估 与质量管理
有效沟通
02
具备良好的团队 协作能力,能够 与团队成员共同
完成工作任务
03
具备良好的组织 协调能力,能够 协调和管理各种
资源
04
具备良好的学习 能力,能够不断 更新自己的知识
和技能
05
具备良好的心理 素质,能够应对 工作中的压力和
挑战
感谢您的观看
4
就业前景与职业 发展
主要就业领域
1
2
3
4
5
6
Hale Waihona Puke 政府部门:卫 生、社保、医
保等
医疗机构:医 健康管理机构: 企业:人力资
院、诊所、康 健康咨询、体 源、员工健康
复中心等
检中心等
福利管理等
教育机构:高 校、职业院校
等
科研机构:公 共卫生、健康
计算机图形学第6章课后习题参考答案
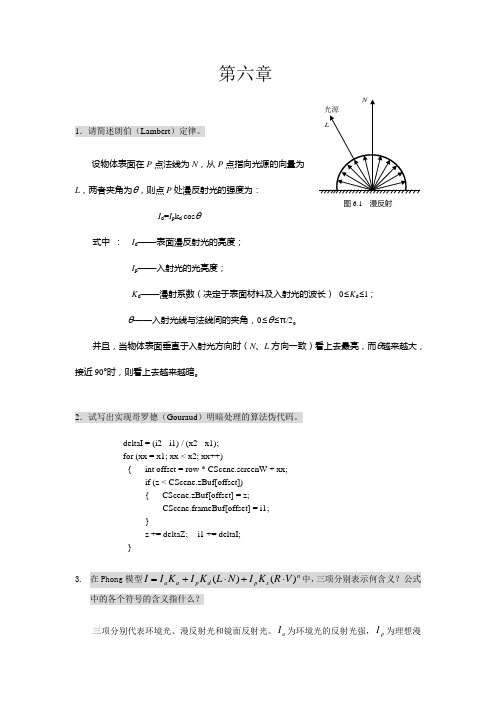
第六章1.请简述朗伯(Lambert )定律。
设物体表面在P 点法线为N ,从P 点指向光源的向量为L ,两者夹角为θ,则点P 处漫反射光的强度为:I d =I p k d cos θ式中 : I d ——表面漫反射光的亮度;I p ——入射光的光亮度;K d ——漫射系数(决定于表面材料及入射光的波长) 0≤K d ≤l ; θ——入射光线与法线间的夹角,0≤θ≤π/2。
并且,当物体表面垂直于入射光方向时(N 、L 方向一致)看上去最亮,而θ越来越大,接近90°时,则看上去越来越暗。
2.试写出实现哥罗德(Gouraud )明暗处理的算法伪代码。
deltaI = (i2 - i1) / (x2 - x1);for (xx = x1; xx < x2; xx++){ int offset = row * CScene.screenW + xx;if (z < CScene.zBuf[offset]){ CScene.zBuf[offset] = z;CScene.frameBuf[offset] = i1;}z += deltaZ; i1 += deltaI;} 3. 在Phong 模型n s p d p a a V R K I N L K I K I I )()(⋅+⋅+=中,三项分别表示何含义?公式中的各个符号的含义指什么?三项分别代表环境光、漫反射光和镜面反射光。
a I 为环境光的反射光强,p I为理想漫反射光强,a K 为物体对环境光的反射系数,d K 为漫反射系数,s K 为镜面反射系数,n 为高光指数,L 为光线方向,N 为法线方向,V 为视线方向,R 为光线的反射方向。
4.试写出实现Phong (冯)明暗方法的伪代码。
for (xx = x1; xx < x2; xx++){ int offset = row * CScene.screenW + xx;if (z < CScene.zBuf[offset]){ CScene.zBuf[offset] = z;pt = face.findPtInWC(u,v);float Ival = face.ptIntensity;CScene.frameBuf[offset] = Ival;}u += deltaU;z += deltaZ;p1.add(deltaPt);n1.add(deltaN);}5.请简述自身阴影的生成方法。
图形学复习大纲
图形学复习大纲计算机图形图像学复习大纲:第一章1.关于计算机图形学的含义(填空、选择、判断)2.关于图形分类及举例3.关于图形的表示方法(两种)<概念、区别>4.图形与图像的区别5.图形学的另一种解释6.阴极射线管组成(五部分)7.什么是分辨率及特性8.习题3(图形、图像含义)第二章1.什么是CDC类(P31下)设备上下文对象的基类2.例2.4、例2.5(P35、P38)第三章1.什么是直线的扫描转换2.程序:利用中点Bresenham绘直线第四章1.多边形定义及分类,三种。
(P73)2.多边形表示方法有哪两种(顶点、点阵)及其概念3.什么是多边形扫描转换4.什么是多边形填充5.有效边表填充原则(下闭上开、左闭右开)6.什么是有效边、有效边表7.分析题:分析某个多边形关于某条扫描线的有效边表8.什么是桶表(又名边表)9.什么是边缘填充?[P80]10.什么是种子填充算法?11.什么是四/八邻接点(连通域)。
简答第五章二维变换和裁剪1.什么是图形几何变换?分为几种?2.什么是(规范化)齐次坐标?点的表达式3.三维变换矩阵的形式,和子矩阵功能:T1、T2、T3、T4形式、作用4.二维图形基本几何变换5.什么是平移(比例)变换,概念和过程?6.如何使用比例变换改变图形形状(P92中)7.什么是旋转变换(概念、结论)8.什么是反射变换(概念、3个结论矩阵)9.错切变换(概念)10.例1、例2(P95、97)11.什么是用户、观察、设备、规格化设备坐标系12.窗口、视区的关系,概念13.什么是裁剪、算法原理14.习题1.2.4(P106)第六章三维变换和投影1.三维几何变换矩阵2.平移、比例矩阵3.什么是平行投影,特点和分类?4.什么是三视图、哪三个,加以区分5.透视投影的特点6.什么是透视投影、视心、视点、视距7.透视变换坐标区包含3个(区别)8.什么是灭点、性质是什么?P1259.什么是主灭点、性质?10.什么是一、二、三点透视第七章自由变换曲线和曲面1.什么是样条曲线/面2.曲线曲面的表示形式3.什么是拟合、逼近4.什么是Bezier曲线及性质?P1375.一次、二次、三次Bezier的形状?6.Bezier性质(简答)第九章动态消隐1.什么是消隐?P1872.什么是图形的几何信息、拓扑信息?3.线框、表面实体模型的区别4.什么是消隐图5.消隐算法分类6.隐线算法原理(简答)7.隐线算法的特性8.凸面体的性质第十章真实感图形1.什么是颜色2.颜色的三要素和概念3.三刺激理论4.三原色性质5.常用颜色模型6.灰度和彩色的区分7.颜色渐变的方法8.关于直线的渐变9.三角形颜色渐变10.什么是材质第一章导论1.关于计算机图形学的含义(填空、选择、判断)?计算机图形学是一种使用图形生成原理和算法将二维或三维图形转化为光栅化的计算机显示的学科。
《计算机图形学》课件第6章
第 6 章 真实感图形
1. Gouraud 1) 一个顶点由3个及以上的面汇集, 将这些面的法向平均值 近似为该顶点的法向量(此法向与该多边形物体近似的曲面的 切平面法向比较接近)。 假设顶点V相邻的多边形有k个, 法向 量分别为N1, N2, …, Nk, 则顶点V的法向量取为
第 6 章 真实感图形
第 6 章 真实感图形
扫描线Z缓存算法的流程如下: for (各条扫描线) {
扫描线帧缓冲器置为背景色; 扫描线Z缓冲器置为最小z值; for(每一个多边形) { 将该多边形进行投影变换; 求多边形与当前扫描线的二维投影之间的交点;
for(每一对交点之间所含像素)
第 6 章 真实感图形 { if(该像素的z值大于Z缓冲器在该处的z值) {
Ie=IaKa 其中, Ia是环境光的光强, Ka是物体对环境光的反射系数。
第 6 章 真实感图形
4. 已知简单光照模型为
I=IaKa+IpKd cosθ+IpKs(cosα)n 也就是说, 物体表面上一点P反射到视点的光强I为环境光的反 射光强Ie、 漫反射光强Id和镜面反射光强Is的总和。 简单光照 模型中的几何量分布如图6-3所示。
第 6 章 真实感图形
此凸多面体在以视点为顶点的视图四棱锥内,视点与第i个 面上一点连线的方向为(li, mi, ni)。 那么第i个面为自隐藏面的 判断方法是
(ai, bi, ci)×(li, mi, ni)>0 对于任意凸多面体, 可先求出所有隐藏面, 然后检查每条边, 若 相交于某条边的两个面均为自隐藏面, 那么根据任意两个自隐 藏面的交线为自隐藏线可知该边为自隐藏边。
第 6 章 真实感图形 上面的五项只要有一项成立, P就不遮挡Q。 如果所有测 试都失败, 就必须对两个多边形在xy平面上的投影作求交运算。 计算时不必具体求出重叠部分, 在交点处进行深度比较, 只要能 判断出前后顺序即可。 若遇到多边形相交或循环重叠的情况, 还必须在相交处分割多边形, 然后进行判断。
【中南大学】计算机图形学习题及答案
计算机图形学作业答案第一章序论第二章图形系统1.什么是图像的分辨率?解答:在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目。
2.计算在240像素/英寸下640×480图像的大小。
解答:(640/240)×(480/240)或者(8/3)×2英寸。
3.计算有512×512像素的2×2英寸图像的分辨率。
解答:512/2或256像素/英寸。
第三章二维图形生成技术1.一条直线的两个端点是(0,0)和(6,18),计算x从0变到6时y所对应的值,并画出结果。
解答:由于直线的方程没有给出,所以必须找到直线的方程。
下面是寻找直线方程(y =mx+b)的过程。
首先寻找斜率:m =⊿y/⊿x =(y2-y1)/(x2-x1)=(18-0)/(6-0) = 3 接着b在y轴的截距可以代入方程y=3x+b求出 0=3(0)+b。
因此b=0,所以直线方程为y=3x。
2.使用斜截式方程画斜率介于0°和45°之间的直线的步骤是什么?解答:(1)计算dx:dx=x2-x1。
(2)计算dy:dy=y2-y1。
(3)计算m:m=dy/dx。
(4)计算b: b=y1-m×x1(5)设置左下方的端点坐标为(x,y),同时将x end设为x的最大值。
如果dx < 0,则x=x2、y=y2和x end=x1。
如果dx > 0,那么x=x1、y=y1和x end=x2。
(6)测试整条线是否已经画完,如果x > x end就停止。
(7)在当前的(x,y)坐标画一个点。
(8)增加x:x=x+1。
(9)根据方程y=mx+b计算下一个y值。
(10)转到步骤(6)。
3.请用伪代码程序描述使用斜截式方程画一条斜率介于45°和-45°(即|m|>1)之间的直线所需的步骤。
假设线段的两个端点为(x1,y1)和(x2,y2),且y1<y2int x = x1, y = y1;float x f, m = (y2-y1)/(x2-x1), b = y1-mx1;setPixel( x, y );/*画一个像素点*/while( y < y2 ) {y++;x f = ( y-b)/m;x = Floor( x f +0.5 );setPixel( x, y );}4.请用伪代码程序描述使用DDA算法扫描转换一条斜率介于-45°和45°(即|m| ≤1)之间的直线所需的步骤。
计算机图形学-第六章讲义
DC与NC之间的关系 ➢ 对每一个物理设备而言,DC与NC仅仅 是坐标值相差一个比例因子 ➢ NC可以看成是一个抽象的图形设备, 要输出到具体的设备时,只需乘上一个 比例因子即可
计算机图形学-第六章讲义
6.1 2D 观察变换
考察一个图形时,往往采用两种模型:
➢ 物理模型:是用户在WC中描述的 ➢ 逻辑模型:是在显示器上呈现的物体的图形,
计算机图形学-第六章讲义
线段的裁剪
Cohen-Sutherland直线裁剪(CS算法) Liang-Barsky 直线裁剪(LB算法) Nicholl-Lee-Nicholl 直线裁剪(NLN算法) 非矩形裁剪窗口
计算机图形学-第六章讲义
Cohen-Sutherland 线段裁剪
思想:
视口: 显示设备上用于窗口映射的坐标 区域,也叫视区。
观察变换:世界坐标系中部分场景映射到 设备坐标系的过程称为观察变换,也叫视 像变换,或称为从窗口到视口的变换。
计算机图形学-第六章讲义
2D 的观察流程
MC 使用建模坐标变换 WC 将世界坐标转
构造世界坐标场景
换为观察坐标
VC
DC 将规范化视口 NVC 使用窗口-视区描述
计算机图形学-第六章讲义
坐标系
1. 世界坐标系(World Coordinates) 用户处理自己的图形时所采用的坐标系,坐标的 大小和尺寸由用户确定。
2. 设备坐标系(Device Coordinates) 与一个图形设备相关的坐标系叫设备坐标系。如 显示器或打印机有它们自己的坐标系。
3. 规格化坐标系(Normal Device Coordinates) 它是独立于具体物理设备的一种坐标系,具有显 示空间在X和Y方向上都是从0到1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于原点对称
28
基本几何变换——对称变换
(4)关于y=x 对称
x=y p(x,y) p'(y,x) X
关于x=y对称
0 1 0 1 0 0 0 0 1
Y
29
基本几何变换——对称变换
(5)关于y=-x 对称
x=-y
Y
0 1 0 1 0 0 0 0 1
0 cos 0
1 0 tg 1 0
0
tg 1 0
0 1
0
0 1
0
43
几何逆变换
所有的几何变换都有逆变换,所谓逆变换就是 指与原变换操作相反的操作过程。
平移变换的逆变换:反方向平移
旋转变换的逆变换:反方向旋转
缩放变换(sx,sy)逆变换:缩放变换(1/sx,1/sy) 镜面反射变换的逆变换与原变换一样
37
二维图形几何变换的计算
3. 多边形的变换
x x x ... x' n
' 1 ' 2 ' 3
y y y y
' 1 ' 2 ' 3
...
' n
1 x1 1 x2 1 x3 ... ... 1 xn
y1 y2 y3 ... yn
R R(1 ) R( 2 ) R(1 2 )
42
复合变换
cos sin 0 cos R sin cos 0 0 0 1 0 0 1 tg 0 cos 0 tg 1 0 0 cos 0 0 0 1 0
到另一个坐标位置的重定位过程。
Y
P' T P Tx Ty
X
图6-1 平移变换
9
基本几何变换——平移变换
推导:
x ' x Tx y ' y Ty
矩阵形式:
x'
y ' x
y Tx
Ty
10
Tx,Ty称为平移矢量。
平移变换 X’=X+Tx,Y’= Y+Ty
(X’ Y’ 1)=(X Y Y B A (0,0) A* 1) 1 0 0 0 1 0 Tx Ty 1
错切变换
0 1 1 0 0 2 3 1 1 1 1 1
=
1 0
1 1
Y
1 1
沿哪个方 向错切?
C O
B A
X
错切变换
3) 当b0且c0时, (x* y* 1)=(x+cy bx+y 1) :图形沿x,y两个方向 作错切位移。
二维图形几何变换的计算
几何变换均可表示成P’=P*T的形式。 1. 点的变换
这两种方法本质上是一样的, 是相对的关系。
图形的几何变换
图形的几何变换是指对图形的几何 信息经过平移、比例、旋转等变换 后产生新的图形,是图形在方向、 尺寸和形状方面的变换。
在几何变换过程中图形的拓扑信息保持不变 对于线框图,只对线段的端点作变换,连接 变换后的端点产生新的图形。
几何变换的作用
把用户坐标系与设备坐标系联系起来; 可由简单图形生成复杂图形; 动态显示。…………
比例变换(缩放变换)
1 0 0 S
(x′ y′ 1)=(x y 1)
0
1 0
0 0
它的缩放的比例因子是什么?
基本几何变换——比例变换
Sx=Sy>1 ÔÍ ¼ ÔÍ ¼ Sx<Sy
Sx=Sy<1
Sx>Sy
(a) Sx=Sy比例
图6-3 比例变换
(b) Sx<>Sy比例
14
基本几何变换——比例变换
B*
C*
C
X
物体上的每个 点平移相同的 步长
平移变换只改变图形的位置,不改变图形的 大小和形状。
比例变换(缩放变换)
x ′=Sx.x, y′=Sy.y Sx (x′ y′ 1)=(x y 1) 0 Sy 0 0 0 0 0 1
–以坐标原点为缩放参照点(只有原点是保持
位置不变的) –当Sx=Sy=1时:物体尺寸不变 –当 Sx=Sy>1时:沿 x,y 方向等比例 放大。 –当SxSy时:沿x,y方向作非均匀比 例变换,图形变形。
齐次坐标的主要作用
----将各种变换用阶数统一的矩阵来表示。
提供了用矩阵运算把二维、三维甚至高维空间上 的一个点从一个坐标系变换到另一坐标系的有效 方法。便于变换合成。
6.2 基本几何变换
基本几何变换都是相对于坐标原点和坐标轴进
行的几何变换。
8
基本几何变换——平移变换
平移是指将p点沿直线路径从一个坐标位置移
26
基本几何变换——对称变换
(2)关于y轴对称
1 0 0 0 1 0 0 0 1
Y
P'(-x,y)
p(x,y) X
关于y轴对称
27
基本几何变换——对称变换
(3)关于原点对称
Y
P(x,y) X
1 0 0 0 1 0 0 0 1
40
0 0 1
复合变换——二维复合比例
S x1 0 Ts Ts1 Ts 2 0 S y1 0 0 0 S x1 S x 2 0 S y1 S y 2 0 0 0 S x 2 0 0 1 0 0 0 1 0 Sy2 0 0 0 1
第六章 二维变换及二维观察
如何对二维图形进行方向、尺寸和形状方面的
变换。 如何进行二维观察。
1
6.1
基本概念
图形变换的两种形式:
几何变换:对象本身在固定的坐标系或背景下变换。它 是对对象的每个点进行变换。
(1)图形变动,坐标系不动。
坐标变换:对象本身不动,坐标系相对物体进行变 换。
(2)图形不动,坐标系变动;
错切变换
2)当c=0 (b≠0)时, (x* y* 1)=(x bx+y 1):沿y方 向错切,图形的x坐标不变;
•当b>0:图 形沿+y方向 错切。 ABCD→ A1B1C1D1
•当b<0:图 形沿-y方向 错切。 ABCD→ A2B2C2D2
例
O A B C
0 1 0 0 1 1 1 0 0 2 1 0 0 0 1
比例变换是指对p点相对于坐标原点沿x方向放 缩Sx倍,沿y方向放缩Sy倍。其中Sx和Sy称为 比例系数。
Y
P'(4,3) P(2,1)
X
图6-2 比例变换(Sx=2,Sy=3)
15
产生压缩或拉伸的效果。 Y Y
X Sx=Sy=2 Sx=2,Sy=1
X
Y
B(3,4)
相对坐标原 点缩放变换 (以坐标原点 为缩放中心)。 当 Sx=2,Sy=2 时,变换后的 各顶点坐标 是多少?
P(x,y) X
P'(-y,-x)
关于x=-y对称
30
基本几何变换——错切变换
错切变换,也称为剪切、错位变换,用于产 生弹性物体的变形处理。
y y y
O O (a) 原图 x O (b) 沿x 正方向错切 x
x
错切变换
(c) 沿y 正方向错切
31
错切变换
x*=x+c.y,
(x* y*
y*=b.x+y
齐次坐标 齐次坐标表示法就是由n+1维向量表示一个n维向量。
如n维向量(P1,P2, … ,Pn)表示为 (hP1,hP2,…,hPn,h),其中h称为哑坐标。 1.h可以取不同的值,所以同一点的齐次坐标不是唯 一的。普通坐标与齐次坐标的关系为“一对多”。 例如:将普通坐标系下的点(2,3)变换为齐次坐标 (2,3,1),(1,1.5,0.5),(4,6,2),(6,9,3), 等等 2.当h=1时的齐次坐标称为 规格化坐标
基本几何变换——旋转变换
二维旋转是指将p点绕坐标原点转动某个角度
(逆时针为正,顺时针为负)得到新的点p’
Y
的重定位过程。
P' r θ r
α
P X
20
图6-4 旋转变换
基本几何变换——旋转变换
推导: (极坐标)
x r cos
y r sin
x ' r cos( ) x cos y sin y ' r sin( ) x sin y cos
C(4,2)
A(1,1) (0,0) X
Y
B(3,4)
相对坐 标原点 缩放变 换。 Sx=2, Sy=2
C(4,2) A(1,1) (0,0) X
Y
B(3,4)
相对A点的 缩放变换(以 A点为缩放 中心)。当 Sx=2,Sy=2 时,变换后的 各顶点坐标 是多少?
C(4,2)
A(1,1) (0,0) X
39
复合变换——二维复合平移
1 0 0 1 0 Tt Tt1 Tt 2 0 1 0 0 1 Tx1 Ty1 1 Tx 2 Ty 2 1 0 Tx1 Tx 2 0 1 Ty1 Ty 2 0 0 1
x'
y ' 1 x
a b c d y 1 l m
p q r
36
二维图形几何变换的计算
2. 直线的变换
x x
' 1 ' 2
y y
' 1 ' 2
1 x1 1 x2
y1 y2
a b 1 c d 1 l m