张力腿平台的环境荷载及响应
张力腿平台

张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。
不同类型张力腿平台的主要结构特征与技术特点
不同类型张力腿平台的主要结构特征与技术特点
吴家鸣
【期刊名称】《海洋科学》
【年(卷),期】2014(000)004
【摘要】张力腿平台(简称 TLP)是一种垂直系泊的顺应式平台,其主要设计思想是通过平台自身的特殊结构形式,产生远大于平台结构自重的浮力,浮力除了抵消结构自重之外,所产生的剩余浮力与张力腿的预张力相平衡。
时刻处于受张拉绷紧状态的张力腿使平台的横摇、纵摇和垂荡运动较小,近似于刚性。
张力腿平台立柱主要为直立的圆筒型或方形截面结构,这样的柱型结构所受水动力载荷主要是水平方向的波浪和海流力,它们可以通过张力腿的柔性约束,允许平台在水平面上的纵荡、横荡和艏摇有一定自由度的顺应式运动。
张力腿平台这样的结构形式使得它所受到的环境载荷可以通过平台自身的惯性力来得到平衡,从而使张力腿平台具有良好的运动性能。
【总页数】8页(P101-108)
【作者】吴家鸣
【作者单位】华南理工大学土木与交通学院船舶与海洋工程系,广东广州510640
【正文语种】中文
【中图分类】TE5
【相关文献】
1.张力腿平台张力腿焊接工艺 [J], 宋峥嵘
2.深水张力腿平台张力腿系统的腐蚀控制探索 [J], 余直霞
3.张力腿平台在位期间张力腿涡激振动疲劳分析 [J], 刘玉玺;黄怀州;刘钊
4.张力腿平台在位期间张力腿涡激振动疲劳分析 [J], 刘玉玺;黄怀州;刘钊;
5.不同类型钢渣组分和结构特征及其钢渣粉技术特点比较 [J], 甘万贵;周晟明因版权原因,仅展示原文概要,查看原文内容请购买。
张力腿平台

MOSES TLP的主体由四 根细长角柱和一个水下浮式 基座构成。平台的浮力主要 由水下浮式基座提供。
ETLP
9
按采油树位置分类
湿树平台 采油树位于海底。减少了平台上体的负载,不需要建造体 积庞大的平台主体,因而降低了平台的总体造价,湿树平台的 生产储备能力具有很大的弹性,新增的设备和海底油井容易加 装到现有的生产系统中,对油田的远期开发比较方便。
5
建造与安装过程
张力腿平台通常是将平台主体和上体分开建造,然后在海上进行合拢。
SeaStar TLP的整个安装过程可以分为4个独立的阶段进行。每个阶段耗时 都较短,并且当每个安装阶段结束后.己完成安装的平台部分都处于风暴 安全状态.可以最大程度地缩短平台处于不稳定状态中的时间,降低了作 业风险。
7
第一代张力腿平台
Heidrun TLP建成于1995年,位 于北海距挪威海岸175km的海域,工 作水深345m。 Heidrun TLP是世界上第一座也 是惟一的一座混凝土张力腿平台。因为 其主体构造采用了混凝土结构,所以主 体排水量远远超过其他钢制张力腿平台, 达到了288000t左右。 从1984年至今,世界上建成投入 生产的传统类型张力腿平台共有11座, 尚未发生过倾覆、沉没等重大事故,拥 有优良的工作记录,由此坚定了业界对 TLP这种新兴海洋平台结构的信心。
张力腿平台通过自身的结构形式,产生远大于结构自重的 浮力,剩余部分称为剩余浮力。这部分剩余浮力与预张力 平衡。
半顺应半刚性:
预张力使张力腿时刻处于受张拉的绷紧状态,从而使平台 平面外的运动(横摇、纵摇和垂荡)较小,近似于刚性。 张力腿平台本体主要是直立浮筒结构,一般浮筒所受波浪 力的水平方向分力较垂直方向分力大,因而通过张力腿在 平面内的柔性,实现平台平面内的运动(纵荡、横荡和首 摇),即为顺应式。
张力腿平台的环境荷载及响应-2007
3 6 6 + 4 5 7 5 7 具 有 相 对 稳 定 的特 征
6 5 57 4 7 6 具 有 相对 瞬时 的特 征
综上 所 述
,
。
一般 而 言
3 6 6 + 4 5 7 5 7 在 张 力 腿 疲 劳设计 中十分 重 要
57 6 而 4 6 5 主 要控 7
。
制着 张 力腿 和 浮 体0 甲板 结 构 的最 终设计 率 带分 别 是
特 用 作 应 6 5 7 响 的 力 浪
不 尼 阻 征 决 取 要 主 二 的 应
界 临 到 尼 阻 于 函 递 传 次
∗ 8 的 尼 即 平 水 > = < ∋ 数
。
此 因 粘 流 势 行 进 (
的 腿 力 张 壤 土 性 算 计
本 基 劳 疲 和 构 结 涉 会 常 通
。
一
,
。
,
,
。
、
低 较
的 尼 阻
外 之 此 这 在 以 所
起 引 会 还 荷 境 环 些
均 平 个 一 向 方 的 载
角 摇 脂 的 平 对 上
对 相 境 环 均
张 性 刚 响 的 用 作
引 会 腿 力 平 如 应
,
。
,
,
,
。
会 也 载 作 沉
、
、
力 的
应 响 学 腿 力 张
析 分 的 境 环 台 平
应 响 载 荷
主 析 分
虑 考 是 要
,
自 台 平
度 刚 的 身
量 质
特 等 尼 阻
对 其 及 性
荷 境 环
载
。
。
,
9
基于非线性耦合法的张力腿平台动力特性分析

摘要 : 以 南海为 目标 海域 , 应用 S E S AM 软 件 对 TL P平 台进行 了时域 非线性 耦合 分析 , 验 证 了平 台
在环 境 载荷 作用 下 的运动 性 能 。计 算 了二 阶波浪 力 的传递 函数 , 结 合耦 合分析 法 , 评估 了二 阶波浪
me t ho d a nd Ne ma n a ppr o xi ma t i on we r e c ompa r e d, a nd i t i s c o nc l u de d t ha t t he Ne wm a n a pp r ox i — ma t i o n i s wi t h hi g h pr e c i s i on i n c a l c u l a t i n g l ow— f r e q ue nc y r e s po ns e of a TLP.
力对 平 台船体 、 张力腿 、 立 管 的 影 响 。 比较 了完整 的二 阶传 递 法和 Ne wma n近似 法 的计 算 结 果 。
结果 证 明 , Ne wma n近似 法在 计 算 深水平 台低 频慢 漂 响应 时有较 高的准确 性 。
关键词: 张力腿 平 台; 二 阶 波浪 力 ; QT F法 ; Ne wma n近 似 法 中图分 类号 : TE 9 5 2 文献 标 识码 : A
An a l y s i s o n Mo t i o n Ch a r a c t e r i s t i c o f Te n s i o n Le g Pl a t f o r m
Ba s e d o n No n — l i n e a r Co u pl e d Me t h o d
不同类型张力腿平台的主要结构特征与技术特点_吴家鸣

图 1 Hutton TLP 整体概貌简图
平台上体、立柱及下体在内的平台本体结构可以在 岸上一体化建造、然后整体海上就位安装, 为降低海 上安装和维护费用创造了条件。(4)由于张力腿长度 与水深呈线性关系, 随着水深的增加, 张力腿自重 过大、张力腿的购置费用增加。水深超过 1 000 m 后, 其经济性不佳。(5)由于张力腿的预张力通常较大, 整个张力腿平台系统刚度较强, 对高频波浪力扰动 响应比较敏感。(6)平台本体结构巨大, 造价比第二 代张力腿平台要高得多。
3 第二代张力腿平台的主要结构特 征与技术特点
第二代张力腿平台出现于 20 世纪 90 年代初期, 它在继承第一代张力腿平台优良运动性能和良好经 济效益等优点的同时, 对结构形式进行了优化改进, 使之具有体积小、灵活性好、受环境载荷小、在深 水环境中能稳定地工作等优点。从而更适合于深海 作业条件、恶劣海洋环境和深海的中小油田开发, 并 因此而降低了油田开发和平台的建造成本。目前投 入生产实践的第二代张力腿平台共分为三大系列, 分别是 SeaStar TLP、MOSES TLP 以及 ETLP(Ext-
Marine Sciences / Vol. 38, No. 4 / 2014
103
心, 使立柱在自由表面的波能聚集区中受力面积很 小; 同时, 集中布置的四条立柱存在一定的遮蔽效 应, 一定程度上也减小了平台所受的环境载荷作用。 这些措施减少了立柱所受到的波浪载荷以及由此所 引起的平台在波浪场中的动力响应。
不同类型张力腿平台的主要结构特征与技术特点
Primary structural features and technical characteristics of different types of tension leg platforms
新型张力腿平台双模块浮式海上风电机组结构系统的动力响应研究
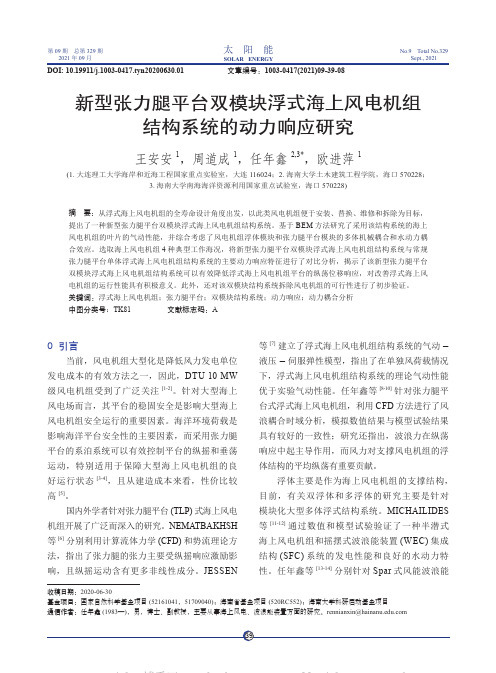
b. 俯视图
图 1 新型张力腿平台双模块浮式海上风电机组结构 系统的结构示意图
Fig. 1 Schematic diagram of installation of new type of TLP dual-modules FOWT structure system
DTU 10 MW 风电机组浮体模块具有重力与 浮力自平衡的特征。张力腿平台模块是通过自身
ॄጎዃ ቧ૰ེೝఇ
值模型的动力响应结果略高于试验模型的动力响
应结果。 浮式海上风电机组 (FOWT) 现有的安装方
法主要是整体安装方法主要和分体安装方法,这
a. 侧视图 ቧ૰ེ
2 种安装方法采用的连接方式均是法兰对准式安
装。由于分体安装方法对浮式海上风电机组与其 平台之间的对准精度要求极高,因此迫切需要一 种新型的具有高鲁棒性且对安装设备的精度要求
国内外学者针对张力腿平台 (TLP) 式海上风电 机组开展了广泛而深入的研究。NEMATBAKHSH 等 [6] 分别利用计算流体力学 (CFD) 和势流理论方 法,指出了张力腿的张力主要受纵摇响应激励影 响,且纵摇运动含有更多非线性成分。JESSEN
等 [7] 建立了浮式海上风电机组结构系统的气动 液压 - 伺服弹性模型,指出了在单独风荷载情况 下,浮式海上风电机组结构系统的理论气动性能 优于实验气动性能。任年鑫等 [8-10] 针对张力腿平 台式浮式海上风电机组,利用 CFD 方法进行了风 浪耦合时域分析,模拟数值结果与模型试验结果 具有较好的一致性;研究还指出,波浪力在纵荡 响应中起主导作用,而风力对支撑风电机组的浮 体结构的平均纵荡有重要贡献。
ॄጎዃ ۉޅऐፇཤ ቧ૰ེೝఇ
低的浮式海上风电机组模块化设计及安装方法。
畸形波作用下张力腿平台运动响应分析的开题报告
畸形波作用下张力腿平台运动响应分析的开题报告一、背景和意义在海洋工程领域中,张力腿平台是一种主要的深海钻探设施,其能够在海洋表面以上支撑海洋平台,同时通过深海减速器将海洋浮泊器的洋流载荷减缓到主结构。
然而,海洋鄂霍次克海浪的存在使得张力腿平台面临着多种力学问题,如动态响应和疲劳破坏等。
其中,畸形波是一种常见的波浪类型,其在海洋钻井平台的动力响应分析中具有重要的作用。
本文旨在研究畸形波作用下张力腿平台的运动响应分析,为深海海洋平台结构设计和工程实践提供理论和实践基础。
二、研究内容本文的研究内容主要包括以下方面:1. 畸形波的特征和传播规律:阐述畸形波的特点、形成原因以及在海上运动中的传播规律。
2. 张力腿平台的结构与参数:对海洋平台的结构、参数、支撑系统进行分析,确定工程实践中所需的参数。
3. 动态响应模型的建立:对畸形波作用下张力腿平台的动态响应进行建模,建立数学模型。
4. 张力腿平台的运动响应分析:使用建立的数学模型,计算出畸形波作用下张力腿平台的运动响应,分析其响应特点和动态性能。
5. 参数分析与优化设计:根据分析结果,对关键参数进行分析与优化设计,提高张力腿平台的安全性、稳定性和性能。
三、预期成果本文的预期成果主要包括以下几个方面:1. 建立了畸形波作用下张力腿平台的动态响应模型,对其运动响应进行了分析,确定了关键响应特征和动态性能。
2. 对张力腿平台关键结构参数进行了分析和优化设计,提高了海洋平台的安全性、稳定性和性能。
3. 对畸形波的特征和传播规律进行了解析和探究,深入了解畸形波在深海工程实践中的作用。
四、研究方法和计划本文的研究将采用理论分析和数值模拟相结合的方法,通过建立动态响应模型,计算出张力腿平台的运动响应,并对其响应特征和性能进行分析和优化设计。
具体研究计划如下:1. 阅读相关文献资料,确定张力腿平台的结构特点和参数要求,并对畸形波的特征进行研究探究。
(时间:1个月)2. 建立畸形波作用下张力腿平台的动态响应模型,选择合适的数学方法,解决模型求解问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张力腿平台的环境荷载及响应
作者:于皓, 周延东, 李欣
作者单位:海洋石油工程股份有限公司设计公司,天津 300451
1.期刊论文王忠畅.高静坤.谢彬.杨晓刚.张艳芳.胡晓明.王兴涛.于皓.刘吉飞.Wang Zhongchang.Gao Jingkun.
Xie Bin.Yang Xiaogang.Zhang Yanfang.Hu Xiaoming.Wang Xingtao.Yu Hao.Liu Jifei张力腿平台总体尺度规划
研究-中国海上油气2007,19(3)
张力腿平台总体尺度规划研究对我国南海深水油气开发具有重要意义.从平台功能要求、系统设施、总体布置、重量控制、船体和张力腿尺寸设计以及平台总体规划流程等方面阐述了张力腿平台总体尺度规划中需要考虑的基本内容.平台的总体尺度规划是张力腿平台设计中最基础的工作.张力腿平台对整个系统的平衡要求严格,整个系统的布置、尺寸等对重量的变化十分敏感,而且平台对于有效荷载的可调余量非常有限,因此一个有效的初始总体规划至关重要.
2.期刊论文余建星.张中华.于皓.YU Jianxing.ZHANG Zhonghua.YU Hao张力腿平台总体响应分析方法研究-海洋
通报2008,27(2)
张力腿平台 ( TLP ) 作为典型的深水顺应式平台,其总体响应分析对于平台设计过程至关重要.分析技术关系到计算效率和相关耦合效应的处理,本文介绍了张力腿平台的基本结构及其运动特点,分析了平台总体响应分析的基本方法,包括频域分析和时域分析的方法,将不同的分析技术相结合,提供了不同的分析策略,为张力腿平台总体响应分析的深入研究提供了一定的基础.
3.期刊论文"典型深水平台概念设计研究"课题组.The Group for Typical Deep Water Platform Conceptual
Design张力腿平台安装分析-中国造船2005,46(z1)
张力腿平台的制造和安装包括陆地建造,船体和组块干拖至连接水域,水上对接,最后与张力腿连接固定.本文在分析制造和安装的几个过程的同时,着重论述了张力腿平台的海上对接,湿拖,充水就位、与张力腿的连接等海上安装过程,为今后开展张力腿平台的安装设计提供参考.
4.会议论文"典型深水平台概念设计研究"课题组张力腿平台安装分析2005
张力腿平台的制造和安装包括陆地建造,船体和组块干拖至连接水域,水上对接,最后与张力腿连接固定.本文在分析制造和安装的几个过程的同时,着重论述了张力腿平台的海上对接,湿拖,充水就位、与张力腿的连接等海上安装过程,为今后开展张力腿平台的安装设计提供参考.
5.期刊论文国家863计划"典型深水平台概念设计研究"课题组.The Group for Typical Deep Water Platform
Conceptual Design张力腿平台结构总体强度分析研究-中国造船2005,46(z1)
本文介绍了张力腿平台总体强度分析的主要方法,使用Sesam软件对传统张力腿平台的整体结构进行有限元模拟,并通过在位工况一年一遇及百年一遇环境条件下的总体强度分析,确定TLP主结构及关键部位的应力水平和强度要求,从而建立了TLP总体强度分析的方法.
6.会议论文国家863计划"典型深水平台概念设计研究"课题组张力腿平台结构总体强度分析研究2005
本文介绍了张力腿平台总体强度分析的主要方法,使用Sesam软件对传统张力腿平台的整体结构进行有限元模拟,并通过在位工况一年一遇及百年一遇环境条件下的总体强度分析,确定TLP主结构及关键部位的应力水平和强度要求,从而建立了TLP总体强度分析的方法.
7.期刊论文"典型深水平台概念设计研究"课题组.The Group for Typical Deep Water Platform Conceptual
Design张力腿平台水动力响应分析-中国造船2005,46(z1)
张力腿平台作为一种典型的深水浮式平台,具有半顺应半固定的运动特征.本文以1000米水深TLP平台为例,详细叙述了TLP平台水动力分析的过程和方法,包括有限元模型的建立,水动力特征的计算,水动力荷载响应的计算以及运动响应分析.
8.期刊论文"典型深水平台概念设计研究"课题组.The Group for Typical Deep Water Platform Conceptual
Design张力腿平台总体规划与重量控制-中国造船2005,46(z1)
本文讨论了张力腿平台总体规划和重量控制方法,并以1000m水深的TLP平台为例,从工艺流程、设备布置、总体重量控制和船体静力平衡等方面,介绍了TLP平台布置的基本流程,通过分析,得出较合理的平台总体规划.最后阐明了总体规划在TLP平台设计中的重要性.
9.会议论文"典型深水平台概念设计研究"课题组张力腿平台总体规划与重量控制2005
本文讨论了张力腿平台总体规划和重量控制方法,并以1000m水深的TLP平台为例,从工艺流程、设备布置、总体重量控制和船体静力平衡等方面,介绍了TLP平台布置的基本流程,通过分析,得出较合理的平台总体规划.最后阐明了总体规划在TLP平台设计中的重要性.
10.会议论文"典型深水平台概念设计研究"课题组张力腿平台水动力响应分析2005
张力腿平台作为一种典型的深水浮式平台,具有半顺应半固定的运动特征.本文以1000米水深TLP平台为例,详细叙述了TLP平台水动力分析的过程和方法,包括有限元模型的建立,水动力特征的计算,水动力荷载响应的计算以及运动响应分析.
本文链接:/Conference_7031471.aspx
授权使用:上海海事大学(wflshyxy),授权号:6b40ae81-9ccb-429e-b606-9e2a00a4190a
下载时间:2010年11月10日。