第一课 无人机空气动力学
无人机工作原理-空气动力学
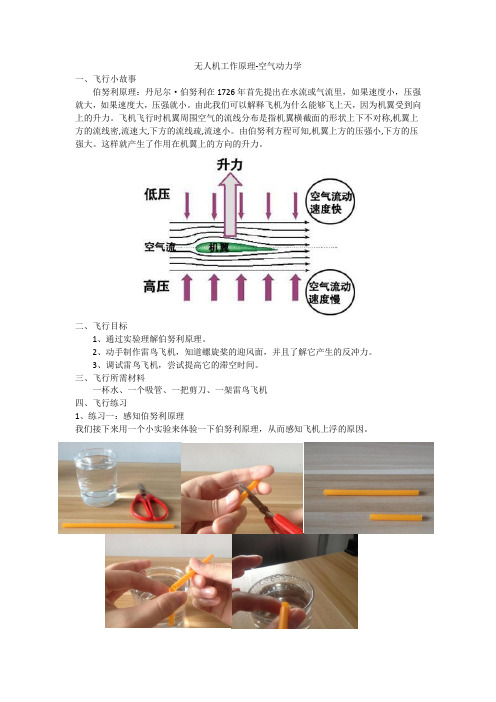
无人机工作原理-空气动力学一、飞行小故事伯努利原理:丹尼尔·伯努利在1726年首先提出在水流或气流里,如果速度小,压强就大,如果速度大,压强就小。
由此我们可以解释飞机为什么能够飞上天,因为机翼受到向上的升力。
飞机飞行时机翼周围空气的流线分布是指机翼横截面的形状上下不对称,机翼上方的流线密,流速大,下方的流线疏,流速小。
由伯努利方程可知,机翼上方的压强小,下方的压强大。
这样就产生了作用在机翼上的方向的升力。
二、飞行目标1、通过实验理解伯努利原理。
2、动手制作雷鸟飞机,知道螺旋桨的迎风面,并且了解它产生的反冲力。
3、调试雷鸟飞机,尝试提高它的滞空时间。
三、飞行所需材料一杯水、一个吸管、一把剪刀、一架雷鸟飞机四、飞行练习1、练习一:感知伯努利原理我们接下来用一个小实验来体验一下伯努利原理,从而感知飞机上浮的原因。
左手拿着短的放在水中,右手拿着长的吹气,吸管吹气的那个地方空气速度很快,这样大气压力变小,但是短吸管下面的大气压力没有变化,就会把水压到吹气的地方。
实验完成后注意整理材料哦。
2、练习二、雷鸟飞上天我们组装雷鸟模型飞机,体验伯努利原理,让飞机上天。
步骤一:取出机翼,按照一下方法折叠。
标注为为正折向下折,标注为反折向上折。
注意动作要轻,切勿折断机翼。
你说说飞机在飞行过程中,空气在机翼的行走的路线吗?试试用皮尺测量机翼正反面翼的长度,用速度=路程÷时间来比较一下空气在机翼正反面的流速。
我们发现:空气在机翼上方路程比下方大,时间一样,所以流速要快。
流速的快慢,形成了气压下方比上方大,就形成了向上的压力,飞机就会被往上推。
步骤二:定型主翼,先给翼型定型片贴上双面胶,再将定型片粘贴到机翼上反角背面,最后用加强胶带加固。
步骤三:安装翼台,将翼台安装到机身上,大约7CM,注意翼台前后不能搞错,安装好后将双面胶贴到翼台上;部分机架会太粗,可以用小刀刮一下。
步骤四:安装机翼,将机翼粘帖到翼台上,前后缘不要搞错,粘帖两边机翼要对称;完成后用塑料片和小橡皮圈将机翼再次加固固定;步骤五:安装尾翼,安装尾钩和尾翼翼座,粘帖垂直尾翼和水平尾翼,水平尾翼要和机身水平,垂直尾翼要和水平尾翼垂直。
无人机的空气动力学

无人机的机动气动特性分析
飞行速度与升力之 间的关系
飞行姿态与升力之 间的关系
飞行高度与升力之 间的关系
飞行距离与升力之 间的关系
无人机的空气动力学 实验
实验设备和方法
风洞实验:模 拟无人机在空 中飞行时的气 流环境,测试 无人机的空气 动力学性能。
计算机模拟: 利用计算机软 件模拟无人机 的空气动力学 特性,预测其 在不同飞行条 件下的性能表
空气的物理性质
温度:空气的 温度影响其密
度和粘性
密度:空气的 密度随高度而
变化
粘性:空气具 有粘性,对无 人机产生阻力
压缩性:空气 具有压缩性, 影响无人机的
升力和阻力
空气流动的基本方程
理想气体状态方程:PV=nRT
牛顿内摩擦定律: u*du/dx+dP/dy=0
伯努利方程: p+1/2*rho*v^2+rho*gh=C
无人机的气动特性分 析
无人机的翼型气动特性分析
不同的翼型具有不同的气动 特性,如升力、阻力等
翼型的气动特性分析对于无 人机的设计和优化至关重要
翼型的选择对无人机的气动 特性有着重要影响
无人机翼型的气动特性分析 对于提高无人机的性能和效
率具有重要意义
无人机的飞行气动特性分析
飞行速度:无人机在飞行过程中所 受到的气动阻力与飞行速度的平方 成正比
飞行姿态:无人机的飞行姿态对其 气动特性有着重要的影响,不同的 飞行姿态会导致无人机所受到的气 动阻力不同
添加标题
添加标题
添加标题
添加标题
飞行高度:随着飞行高度的增加, 空气密度逐渐减小,导致无人机所 受到的气动阻力减小,因此无人机 在高速飞行时能够达到更高的飞行 高度
第一章-无人机空气动力学基本知识下

空气流场的基本概念
空气流动的基本规律
• 空气的相对性运动原理 • 运动的转换原理
空气流场的基本概念
• 流场的基本概念 • 定义
可流动的介质(水,油,气等)称为流体,流体 所占据的空间称为流场。
• 流场的描述 (1)流体微团:
空气的小分子群,空气分子间的自由行程与飞行 器相比较 太小,可忽略分子的运动
大气的粘性是空气在流动过程中表现出的一种 物理性质,大气的粘性力是相邻大气层之间相 互运动时产生的牵扯作用力,也叫做大气的内 摩擦力 。
大气的基本物理性质
大气的可压缩性
气体的可压缩性是指当气体的压强改变时其密 度和体积改变的性质。不同状态的物质可压缩 性也不同。液体对这种变化的反应很小,因此 一般认为液体是不可压缩的;而气体对这种变 化的反应很大,所以一般来讲气体是可压缩的 物质。
度、速度有关
压强
大气的压强是指物体的单位面积上所承受的 大气的法向作用力的大小。
大气的基本物理性质
大气温度
表征大气冷热程度的物理量,摄氏、开氏和 华氏温标。 TTkk=为T开c+2氏73温.1标5,,Tc为摄氏温标
大气密度
大气的密度指单位体积的空气的质量,即:
大气的基本物理性质
大气温度、密度及压力随高度的变化
空气流场的基本概念
• 流场的基本概念 • 流场的描述 (2)流线:
所有流体微团在同一时刻流动形成的轨线 流线不相交、流体微团不穿越流线(分子的 排斥性)
空气流场的基本概念
• 流场的基本概念 • 流场的描述 (3)迹线:
单个流体微团在一段时间内流动形成的轨 线 (4)定常流:
流场中各点的速度、加速度以及状态参数等 只是几何位置的函数,与时间无关 仅在定常流中,流线与迹线相同。
无人机空气动力学-激波、波阻和膨胀波

2.5 高速空气动力特性
3.激波、波阻和膨胀波
1)激波和波阻 飞机静止时,飞机发出的小扰动会以扰动源为中心, 以同心圆形的波面向四周传播。 飞机以小于音速的速度向前飞行时,扰动在飞机前进 的方向分布较密,反方方向分布较疏。
v0
(a)
2c 3c 4c
o
vc
4c 3c 2c
o
(b)
激波特点: 1.速度下降,温度、压
力、和密度上升。 2.激波的强度越大,传
播的速度越快。
2.5 高速空气动力特性
3.激波、波阻和膨胀波
1)激波和波阻
激波角:激波与气流方向之间的夹角 。 激波分类:正激波、斜激波。
因正激波波面正对着气流,所以正激波波阻大于斜激波。
超音速气流通过正激波后,转化为亚音速气流;通过斜 激波后,可能减速为亚音速气流,也可能仍为超音速气流。
(d)
2
3
4
B
2.5 高速空气动力特性
3.激波、波阻和膨胀波
1)激波和速时,通过飞机机头做各扰动波波 面的切线,切线形成的圆锥体。
激波:气流以超音速流过带有内折 角物体表面时,受到强烈压缩而形 成的强扰动波。
2.5 高速空气动力特性
3.激波、波阻和膨胀波
1)激波和波阻
2.5 高速空气动力特性
3.激波、波阻和膨胀波
1)激波和波阻
激波形状影响因素:
飞行马赫数和飞机的外形 。
2.5 高速空气动力特性
3.激波、波阻和膨胀波
2)膨胀波 膨胀波:由于物面外折角对超音速气流的扰动,引起气 流膨胀加速的扇形波。 结论:超音速气流是通过激波压缩减速,通过膨胀波膨胀 加速。
2 4
2.5v 高0 速空2c气3c 4c动力特性 v c
空气动力学与飞行原理课件:无人直升机基本飞行原理

和最小下滑角。
6
第二节
学
习 大
二、
无人直升机操纵及控制原理
纲
7
贰 无人直升机操纵及控制原理
直升机运动包括姿态运动和轨迹运动。姿态 运动指绕无人机机体轴的三个角运动,轨迹运动 指无人直升机质心在空间中的运动轨迹。无人直 升机操纵就是控制直升机的姿态运动和轨迹运动 。 飞行控制系统是一个根据测量元件测量当前直 升机的飞行姿态和运动轨迹,反馈给中央处理器, 根据目标航线运动和当前测量值差别,由一套控制 算法,控制执行机构,进行姿态控制,使无人直升 机按照当前预定轨迹运动。
图3.16 自动倾斜器示意图
12
贰 无人直升机操纵及控制原理
需要说明的是,虽然桨盘平面的倾斜相对桨叶的桨距变化 有90度的滞后,但是自动倾斜器的倾转方向与桨盘平面的 倾转方向是大体相同的。主需要说明的是,虽然桨盘平面 的倾斜相需对要桨说叶明的的桨是,距虽变然化桨有盘9平0度面的的倾滞斜后相,对但桨是叶自的动桨倾斜 器的距倾变转化方有向90与度桨的盘滞平后,面但的是倾自转动方倾向斜是器大的倾体转相方同向的与。主要 为了桨习盘惯平一面致的,倾在转实方向际是控大制体桨相叶同的的时。候主要,为旋了转习环惯的一方致位,角 会超在前实90际度控控制制桨桨叶的叶时来候克,服旋桨转盘环平的面方位的角滞会后超。前但90在度实际设 计周期变距机构的时候由于挥舞铰外伸量的不同,桨盘平 面的控滞制后桨角叶有来时克会服小桨盘于平90面度的,滞需后要。对但在不实旋际转设环计的周操期纵变相位 进行距调机整构使的操时纵候杆由于前挥推舞时铰,外桨伸盘量平的面不同也,是桨前盘倾平。面要的为滞了习 惯一后致角,有在时实会际小控于9制0桨度,叶需的要时对候不,旋旋转转环环的操的纵方相位位角进会超前 90度行控调制整桨使叶操来纵克杆前服推桨时盘,平桨面盘的平滞面后也是。前但倾在。实际设计周期 变距机构的时候由于挥舞铰外伸量的不同,桨盘平面的滞 后角有时会小于90度,需要对不旋转环的操纵相位进行调
无人机空气动力学与飞行原理
无人机空气动力学与飞行原理一、前言随着科技的不断发展,无人机已经成为了现代军事、民用领域中的重要装备。
无人机的空气动力学与飞行原理是其能够实现高效稳定飞行的关键之一。
本文将从无人机的基本组成、空气动力学基础、飞行原理等方面进行详细介绍。
二、无人机的基本组成无人机主要由以下几部分组成:1. 机身:包括飞行控制系统、传感器、电池等设备,以及载荷设备(如相机等)。
2. 机翼:负责提供升力和稳定性。
3. 推进器:负责提供推力,推进器数量和位置因型号而异。
4. 起落架:负责支撑和保护无人机。
三、空气动力学基础1. 升力原理升力是指垂直向上的力量,使得物体能够在空中悬停或飞行。
升力产生的原因是由于物体在流体(如空气)中运动时,流体会对物体产生作用力。
根据牛顿第三定律,物体受到流体作用力时也会对流体产生反作用力,反作用力就是升力。
2. 阻力原理阻力是指物体在流体中运动时遇到的阻碍其前进的力量。
阻力大小与物体速度、流体密度、物体形状等因素有关。
3. 重心和稳定性重心是指物体的重心位置,也就是物体所有质点的平均位置。
无人机在飞行过程中需要保持稳定,这就要求无人机的重心位置要尽可能靠近机翼上表面中心线。
同时,无人机还需要具备足够的稳定性,以便能够保持平衡状态。
四、飞行原理1. 起飞起飞是指无人机从地面上升起并进入空中飞行。
起飞时需要满足一定的速度和升力要求。
一般来说,无人机需要在较长跑道上加速并达到一定速度后才能起飞。
2. 巡航巡航是指无人机在空中以一定速度和高度进行平稳直线或曲线运动。
巡航时需要满足一定的升阻比要求,以确保能够保持稳定状态。
3. 爬升和下降爬升和下降是指无人机在空中上升或下降。
爬升和下降时需要满足一定的速度和升力要求,以确保能够保持稳定状态。
4. 转弯转弯是指无人机在空中进行曲线运动。
转弯时需要满足一定的侧向力和升力要求,以确保能够保持稳定状态。
五、结语本文从无人机的基本组成、空气动力学基础、飞行原理等方面进行了详细介绍。
第一章-无人机空气动力学基本知识上
无人机空气动力学的基本概念
空气动力学的研究方法
• 实验研究方法 • 理依论靠分风析洞方、法激波管以及测试设备 进行模拟试飞条件进行飞行实验 • 数值计算方法
优点:结果较为真实、可靠 缺点:条件苛刻、成本高
无人机空气动力学的基本概念
空气动力学的研究方法
• 理论分析方法 运用基本物理定律,通过简化模型的 方法,建立数学方程求解解析解。 优点:成本比较低 缺点:很难得到工程上有价值的结果
大气的分层
3、中间层 中间层为离地球表面50~85km的一层。 4、电离层 从中间层顶界到离地平面800km之间的一层 称为电离层。带有很强的导电性,能吸收、 发射和折射无线电波。 5、散逸层
热层顶界以上为散逸层,它是地球大气的 最外层。
动时的空气动力学。 分为固定翼无人机动气动力学
和旋翼无人机动气动力学。
无人机空气动力学的基本概念
空气动力学的研究方法
• 基本理论——提高飞行性能 • 性能计算——无人机设计 • 飞行力学——无人机参数 • 飞行
大气层——地表被包裹着的一层很厚的大气 大气环境——飞行器在大气层内飞行时所处的
大气飞行环境的基本知识
大气的分层
2、平流层 平流层位于对流层的上面,其顶界约为 50km。在平流层大气主要是水平方向的流 动。随着高度的增加,起初气温基本保持 不变;20~32km以上,气温升高较快。平 流层的主要特点是空气沿铅垂方向的运动 较弱,因而气流比较平稳,能见度较好。
大气飞行环境的基本知识
无人机空气动力学的基本概念
空气动力学的研究方法
• 数值计算方法 利用计算机,通过近似计算方法,例如有 限元法、有限体积法,求得方程的数值解。 优缺点介于实验法和理论法之间。
无人机空气动力学-升力的产生
➢ 从右图可以看出,机翼 升力的产生主要靠机翼上 表面的吸力作用,尤其是 上表面前段,而不是靠机 翼下表面的正压作用。
2.4 作用在飞机上的空 气动力
2.4 作用在飞机上的空气动力
1.空气动力、阻力和升力 2.升力的产生 3.阻力 4.升力与阻力计算 5.升力、阻力和升阻比曲线 6.机翼的压力中心和焦点
2.4 作用在飞机上的空气动力
2.升力的产生
产生原理:连续性定理、伯努利定理
前方来流机翼分成上下 部分,一部分从机翼的上 表面流过,一部分从机翼 的下表面流过。
机翼升力的着力点, 称为压力中心。
2.4 作用在飞机上的空气动力
2.升力的产生
翼型压力分布 1)矢量表示法
➢ 如果机翼表面的压力低于大 气压力,称为吸力(负压)。
➢ 如果机翼表面的压力高于大 气压力,称为压力(正压)。
负压区
驻点 正压区
最低压力点
2.4 作用在飞机上的空气动力
2.升力的产生
由连续性定理可知,流 过机翼下边面的气流,比 流过下表面的气流速度更 快。
2.4 作用在飞机上的空气动力
2.升力的产生 产生原理:连续性定理、伯努利定理
由伯努利定理知:
2.4 作用在飞机上的空气动力
2.升力的产生 产生原理:连续性定理、伯努利定理
上下表面出现的压力差,在 垂直于相对气流方向的分量, 就是升力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一课空气动力学
一、飞行小故事
伯努利原理:丹尼尔·伯努利在1726年首先提出在水流或气流里,如果速度小,压强就大,如果速度大,压强就小。
由此我们可以解释飞机为什么能够飞上天,因为机翼受到向上的升力。
飞机飞行时机翼周围空气的流线分布是指机翼横截面的形状上下不对称,机翼上方的流线密,流速大,下方的流线疏,流速小。
由伯努利方程可知,机翼上方的压强小,下方的压强大。
这样就产生了作用在机翼上的方向的升力。
二、飞行目标
1、通过实验理解伯努利原理。
2、动手制作雷鸟飞机,知道螺旋桨的迎风面,并且了解它产生的反冲力。
3、调试雷鸟飞机,尝试提高它的滞空时间。
三、飞行所需材料
一杯水、一个吸管、一把剪刀、一架雷鸟飞机
四、飞行练习
1、练习一:感知伯努利原理
我们接下来用一个小实验来体验一下伯努利原理,从而感知飞机上浮的原因。
左手拿着短的放在水中,右手拿着长的吹气,吸管吹气的那个地方空气速度很快,这样大气压力变小,但是短吸管下面的大气压力没有变化,就会把水压到吹气的地方。
实验完成后注意整理材料哦
2、练习二、雷鸟飞上天
我们组装雷鸟模型飞机,体验伯努利原理,让飞机上天。
步骤一:取出机翼,按照一下方法折叠。
标注为为正折向下折,标注为反折向上折。
注意动作要轻,切勿折断机翼。
你说说飞机在飞行过程中,空气在机翼的行走的路线吗?试试用皮尺测量机翼正反面翼的长度,用速度=路程÷时间来比较一下空气在机翼正反面的流速。
我们发现:空气在机翼上方路程比下方大,时间一样,所以流速要快。
流速的快慢,形成了气压下方比上方大,就形成了向上的压力,飞机就会被往上推。
步骤二:定型主翼,先给翼型定型片贴上双面胶,再将定型片粘贴到机翼上反角背面,最后用加强胶带加固。
步骤三:安装翼台,将翼台安装到机身上,大约7CM,注意翼台前后不能搞错,安装好后将双面胶贴到翼台上;部分机架会太粗,可以用小刀刮一下。
步骤四:安装机翼,将机翼粘帖到翼台上,前后缘不要搞错,粘帖两边机翼要对称;完成后用塑料片和小橡皮圈将机翼再次加固固定;
步骤五:安装尾翼,安装尾钩和尾翼翼座,粘帖垂直尾翼和水平尾翼,水平尾翼要和机身水平,垂直尾翼要和水平尾翼垂直。
步骤六:安装螺旋桨和橡筋
仔细观察雷鸟飞机的螺旋桨,你发现它的面有什么特点?
发现:螺旋桨面不是平的,是曲面的。
上有个方向特别高的那一面叫迎风面,用手转动螺旋桨,你来感受螺旋桨产生的风向。
螺旋桨朝迎风面旋转,会产生向后的气流,产生反冲力,飞机前进。
反之,气流会向前,则飞机向后。
搭建完成之后,我们来一起飞行吧,比一比谁的飞机滞空时间最长。
五、飞行小结
你的飞机在空中滞空时间长吗?如何调节能达到最佳效果?
试试把飞机的重心平衡起来,包括左右方向和前后方向。
再去飞行,看看有没有改良。