高等代数 第四章 线性变换
高等代数中的线性变换思想应用

高等代数中的线性变换思想应用
在高等代数中,线性变换是一种非常重要的概念。
它是指将向量空间中的每一个向量映射到另一个向量的一种函数。
线性变换具有如下性质:
线性变换对应的线性方程组可以用线性方程组的通解表示。
线性变换满足线性性质,即对于任意的两个向量 $x$ 和$y$,以及任意的两个标量 $\alpha$ 和 $\beta$,都有:$$T(\alpha x + \beta y) = \alpha T(x) + \beta T(y)$$ 线性变换满足向量空间中的加法性质,即对于任意的两个向量 $x$ 和 $y$,都有:$$T(x+y) = T(x) + T(y)$$ 线性变换的应用非常广泛,在许多领域都有广泛的应用,如:
在线性代数中,线性变换可以用来描述向量空间的线性变换、线性映射、线性映射等概念。
在拉格朗日插值中,线性变换可以用来描述拉格朗日插值多项式的构造。
在图像处理中,线性变换可以用来描述图像的平移、旋转、缩放等变换。
在机器学习中,线性变换可以用来描述线性回归、线性判别分析等模型,以及神经网络中的线性变换层。
总之,线性变换是一种非常重要的概念,在高等代数中有着广泛的应用,并在许多领域中都被广泛使用。
它可以用来描述向量空间的线性变换、线性映射、线性映射等概念,也可以用来描述图像的平移、旋转、缩放等变换,以及机器学习中的线性回归、线性判别分析等模型,以及神经网络中的线性变换层。
线性代数之线性变换说明
最近想明白特点值、特点值到底有什么物理意义,搜到了这篇文章,共享一下。
来源:孙哲的日记[1. 特点的数学意义]咱们先考察一种线性转变,例如x,y坐标系的椭圆方程能够写为x^2/a^2+y^2/b^2=1,那么坐标系关于原点做旋转以后,椭圆方程就要发生变换。
咱们能够把原坐标系的(x,y)乘以一个矩阵,取得一个新的(x',y')的表示形式,写为算子的形式确实是(x,y)*M=(x',y')。
那个地址的矩阵M代表一种线性变换:拉伸,平移,旋转。
那么,有无什么样的线性变换b(b是一个向量),使得变换后的结果,看起来和让(x,y)*b像是一个数b乘以了一个数字m*b? 换句话说,有无如此的矢量b,使得矩阵A*b如此的线性变换相当于A在矢量b上面的投影m*b? 若是有,那么b确实是A的一个特点向量,m确实是对应的一个特点值。
一个矩阵的特点向量能够有很多个。
特点值能够用特点方程求出,特点向量能够有特点值对应的方程组通解求出,反过来也一样。
例如,设A为3阶实对称矩阵,a1=(a,-a,1)T是Ax=0的解,a2=(a,1,-a)T是(A+E)x=0的解,a≠2,那么常数a=? 因为a1=(a,-a,1)T是Ax=0的解,说明a1=(a,-a,1)T是A的属于0的特点向量,a2=(a,1,-a)T是(A+E)x=0的解,说明a2=(a,1,-a)T是A的属于-1的特点向量。
实对称矩阵属于不同特点值的特点向量式正交的,因此a^2-a-a=0,a≠2,因此a=0。
仍是太抽象了,具体的说,求特点向量的关系,确实是把矩阵A所代表的空间,进行正交分解,使得A的向量集合能够表示为每一个向量a在各个特点向量上面的投影长度。
例如A是m*n的矩阵,n>m,那么特点向量确实是m个(因为秩最大是m),n个行向量在每一个特点向量E上面有投影,其特点值v确实是权重。
那么每一个行向量此刻就能够够写为Vn=(E1*v1n,E2*v2n...Em*vmn),矩阵变成了方阵。
线性代数 线性变换

5) 零变换 O: V V , O(v) = 0
2. 线性变换的性质
设 L: VW 是一个线性变换,则有 (i) L(0) = 0
(ii) L(−v) = −L(v) , vRn.
(iii) 设 v1, ... , vk ∈ V , α1,...,αk ∈ , 有 L(α1v1 +···+αkvk) = α1 L(v1) + ···+ αk L(vk)
称 ker (L)为L 的核, L(S5 设线性算子L(x) = (x1, 0)T: 2 2 . 则ker(L)= Span(e2) ; L( 2) = Span(e1) .
定理1
设 L : V W 是一个线性变换, S是V 的一个子空间. 则 i) ker(L) 是V 的子空间. ii) L(S) 是W 的子空间.
例 2 设 f : ,对应关系为 f (x) = ax+b ,它是线性映射吗? 答:f 是 上的一个线性映射当且仅当 b = 0.
例 3 证明:A Rmn , 映射 L(x) = Ax是从 n m的线性变换.
x=(x1, x2)T
y
1) L(x)=(x1, x2)T 2 2
x
x
L(x)
2) L(x)=3x 2 2
第四章 线性变换
4.1 线性变换的概念
线性变换的判别; 线性变换的核与值域; 线性变换的性质.
1. 线性变换的定义
定义 设 L: VW 是从线性空间V 到线性空间W的映射. 若映射L满足: 对任意的v1, v2 V 及实数 α , β, 有
L(αv1 + βv2) = αL(v1) + βL(v2) 则称映射L是从V 到W的一个线性映射.
高等代数线性变换的运算
线性变换的乘法一般是不适合交换律. 例如,在实数域 R 上的线 性空间 R[x] 中,线性变换
D(f(x)) = f′(x), ∫x
L (f(x)) = f(t)dt
0
的乘积 DL = E ,但一般 L D ̸= E .
. . . .... .... .... . . . . .... .... .... . .
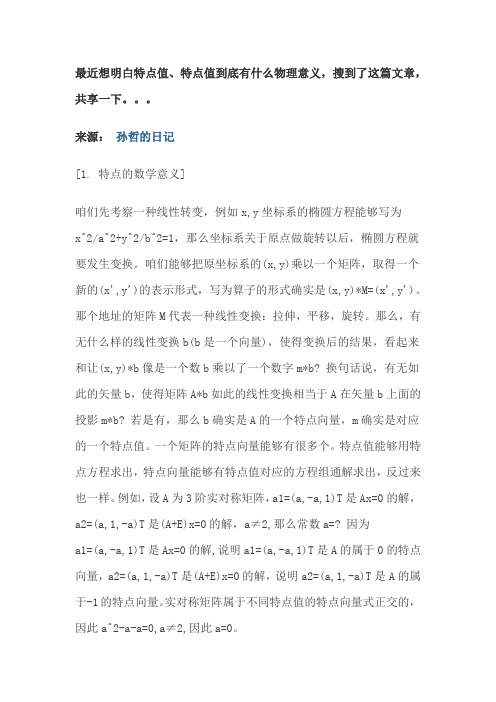
投影变换
定理 设 V 是数域 P 上的一个线性空间,U, W 是 V 的两个子空间,且
V=U⊕W
任取 α ∈ V,设 α = α1 + α2,其中 α1 ∈ U,α2 ∈ W. 令
PU :V
−→V
α = α1 + α2 −→α1
则 PU 是 V 上的一个线性变换,称 PU 是平行于 W 在 U 上的投影,
. . . .... .... .... . . . . .... .... .... . .
. .. . . ..
线性映射的乘法
命题 设 V, U, W 都是数域 P 上的线性空间,A 是 V 到 U 的一个线 性映射,B 是 U 到 W 的一个线性映射,则 BA 是 V 到 W 的 一个线性映射.
. .. . . ..
投影变换
如果 α ∈ U,则 α = α + 0,从而 PU(α) = α. 如果 α ∈ W,则 α = 0 + α,从而 PU(α) = 0.
. . . .... .... .... . . . . .... .... .... . .
. .. . . ..
投影变换
如果 α ∈ U,则 α = α + 0,从而 PU(α) = α. 如果 α ∈ W,则 α = 0 + α,从而 PU(α) = 0. 设 V 上的线性变换 A 也满足 (1),任取 α ∈ V,设 α = α1+ α2. 其中 α1 ∈ U, α2 ∈ W,则
高等代数线性变换分解

则h(A) = f(A)+g(A), p(A) = f(A)g(A)。特别地, f(A)g(A)=g(A)f(A),
线性变换 (1) (2) (3) (4)
§1 线性变换的定义
例1 判断下列所定义的变换 A 是否为线性变换。 在线性空间V中,A x = x+a,a为V中一固定向量; 在线性空间V中,A x = a,a为V中一固定向量; 在P [x]中,A f (x) = f (x+1) ; 在P [x]中,A f (x) = f (x0),x0为P中一固定数;
线性变换
Байду номын сангаас
§2 线性变换的运算
四、线性变换的多项式
线性变换的幂 设 A∈L(V),由于线性变换的乘法满足结合律,
因此对任意取定的正整数n,n个A 的乘积AA…A是一个确定的
线性变换,记为: An。
-n -1 n 0
若A是可逆的,定义A = (A ) 。对任意的A∈L(V),定义A =E。
根据线性变换幂的定义,其指数运算规律为:
例2 在P 3中,下面定义的变换 A 是否为线性变换。 (1) A( x1 , x2 , x3 ) ( x1 x2 , x2 x3 , x3 x1 ) (2) A( x1 , x2 , x3 ) (1, x1 x2 x3 ,1) (3) A( x1 , x2 , x3 ) (0, x1 x2 x3 , 0)
2 ) (4) A( x1, x2 , x3 ) ( x12 , x2 x3 , x3
线性变换
§1 线性变换的定义
二、线性变换的性质
性质1 设 A 是V的线性变换,则 A (0) 0, A ( ) A ( )
性质2 线性变换保持线性组合与线性关系式不变。
高等代数(线性变换)
Im τ = L (ε 1 , ε 2 )
k e r τ = {0}
例 3
建立映射
σ : M 2 ( R) → M 2 ( R)
,
1 σ ( A) = ( A + AT ) , σ 2
是线性映射。
E11, E12 , E21, E22
取
1 2
M2 (R)
的 一 组 基
, 则
σ ( Eij ) = ( Eij + E ji ) ,其中 i, j = 1,2 ,因此, σ
简记作 即可由
矩阵 A = (a ij )m ×n 完全描述。
, α n ) 。这样,线性映射 σ
反之,对于任意一个 m × n 阶矩阵 A ,都可以 定义一个由 n 维线性空间V1 到 m 维线性空间V2 的线 性映射 σ (α1 ,α 2 ,
,α n ) = (β1 , β 2 , , β m )A ,即:
, σ (α n ) ,即可确定线性
设V
1
,V 2
分别是 n , m 维线性空间,取定
,α n 和 V 2
V 1 的基 α 1 , α 2 ,
1 2
的基 β 1 , β 2 ,
, β m 。若
j
σ 是V 到V 的线性映射,由于 σ (α
则 σ (α
j
) ∈V2 ,
)=
∑a
i =1
m
ij
βi
, j = 1, 2 ,
北京科技大学应用学院数力系卫宏儒weihr168yahoocomcn线性变换线性变换这一章的主要内容一线性映射二线性映射的象和核三线性变换四不变子空间五特征值和特征向量一线性映射定义若21vv分别是数域f上的n维m维线性空间是1v到2v的一个映射且满足条件
清华大学高等代数讲义-6

Lesson 4 Example 9 设
22
J =
2
1 2 2 3 1 3 1 3 3 3
,
则 J 的极小多项式是 mJ (x) = [(x − 2)2 , (x − 2), (x − 3)3 , (x − 3), (x − 3)] = (x − 2)2 (x − 3)3 . Theorem 20 A 可对角化 ⇐⇒ A 的极小多项式无重根.
···⊕
Hale Waihona Puke ⊕···在每个循环子空间上选定一个循环基,合起来就是 V 的基. σ 限制到每个循环子空间上,是一个循环变换 ρ 和一个数乘变换 λε 的和. 循环变换 ρ 在循环基下的矩阵是 0 1 . 0 .. , N = . .. 1 0
Lesson 4 而数乘变换 λε 的矩阵是 λI = λ λ .. . λ 因此,σ = ρ + λε 在循环基下的矩阵是 λ 1 λ N + λI = Definition 19 形如 .. .. . . . 1 λ .. .. . . 1 λ ,
λ
Lemma 2 当 µ = λ 时,(σ − µε) 证明思路: (σ − µε) U 是可逆变换
λ
Uλ
是可逆变换.
⇔ (σ − µε) U 是双射 λ ⇔ (σ − µε) U 是单射 λ ⇔ ker(σ − µε) U = {0}.
λ
Lemma 3 根子空间 U1 , U2 , · · · , Us 的和 U1 + U2 + · · · + Us 是直和. 证明思路: 对子空间个数 s 作数学归纳法. 只要证明对于 αi ∈ Ui ,i = 1, 2, · · · , s, α1 + α2 + · · · + αs = 0 ⇔ αi = 0, i = 1, 2, · · · , s.
高等代数线性变换的定义

则称 A 是 V 到 V′ 的一个线性映射. 线性空间 V 到自身的线性映射称为 V 上的线性变换. 数域 P 上的线性空间 V 到 P 的线性映射称为 V 上的线性函数.
线性变换的概念
我们在上一章研究了数域 P 上线性空间的结构. 在许多数学分支 和实际问题中都会遇到线性空间之间的映射,并且这种映射保持 加法和数量乘法,称它为线性映射. 线性代数就是研究线性空间 和线性映射的理论. 在这一章我们来研究线性映射的理论.
. . . .... .... .... . . . . .... .... .... . .
xn
规定
σ(ξ) = Aξ.
σ(ξ) 是一个 m × 1 矩阵,即是空间 Pm 的一个向量. 根据矩阵运 算的性质,易证 σ 是一个映射,并且对于 a ∈ P, ξ, η ∈ Pn,我们 有
. . . .... .... .... . . . . .... .... .... . .
. .. . . ..
. . . .... .... .... . . . . .... .... .... . .
. .. . . ..
线性映射的概念
定义 设 V 与 V′ 是数域 P 上的两个线性空间,V 到 V′ 的一个映射 A 如果保持加法运算和数量乘法运算,即
A (α + β) = A (α) + A (β), ∀α, β ∈ V A (kα) = kA (α), ∀α ∈ V, k ∈ P
. . . .... .... .... . . . . .... .... .... . .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章 线性变换习题精解1. 判别下面所定义的变换那些是线性的,那些不是:1) 在线性空间V 中,A αξξ+=,其中∈αV 是一固定的向量; 2) 在线性空间V 中,A αξ=其中∈αV 是一固定的向量;3) 在P 3中,A),,(),,(233221321x x x x x x x +=; 4) 在P 3中,A ),,2(),,(13221321x x x x x x x x +-=;5) 在P[x ]中,A )1()(+=x f x f6) 在P[x ]中,A ),()(0x f x f =其中0x ∈P 是一固定的数; 7) 把复数域上看作复数域上的线性空间, A ξξ=8) 在P nn ⨯中,A X=BXC 其中B,C ∈P nn ⨯是两个固定的矩阵. 解 1)当0=α时,是;当0≠α时,不是. 2)当0=α时,是;当0≠α时,不是.3)不是.例如当)0,0,1(=α,2=k 时,k A )0,0,2()(=α, A )0,0,4()(=αk ,A ≠)(αk k A()α.4)是.因取),,(),,,(321321y y y x x x ==βα,有A )(βα+= A ),,(332211y x y x y x +++=),,22(1133222211y x y x y x y x y x ++++--+ =),,2(),,2(1322113221y y y y y x x x x x +-++- = A α+ A β A =)(αk A ),,(321kx kx kx),,2(),,2(1322113221kx kx kx kx kx kx kx kx kx kx +-=+-== k A )(α故A 是P 3上的线性变换.5) 是.因任取][)(],[)(x P x g x P x f ∈∈,并令)()()(x g x f x u +=则A ))()((x g x f += A )(x u =)1(+x u =)1()1(+++x g x f =A )(x f + A ))((x g 再令)()(x kf x v =则A =))((x kf A k x kf x v x v =+=+=)1()1())((A ))((x f 故A 为][x P 上的线性变换.6)是.因任取][)(],[)(x P x g x P x f ∈∈则.A ))()((x g x f +=0(x f 0()x g +=)A +))((x f A )((x g )A 0())((x kf x kf =k =)A ))((x f7)不是.例如取a=1,k=I,则A (ka)=-i , k(A a)=i, A (ka )≠k A (a)8)是.因任取二矩阵Y X ,n n P ⨯∈,则A (=+=+=+BYC BXC C Y XB Y X )()A X +A YA (k X )=k BXC k kXB ==)()(A X故A 是n n P ⨯上的线性变换.2.在几何空间中,取直角坐标系oxy,以A 表示将空间绕ox 轴由oy 向oz 方向旋转90度的变换,,以B 表示绕oy 轴向ox 方向旋转90度的变换,以C 表示绕oz 轴由ox 向oy 方向旋转90度的变换.证明:A 4=B 4=C 4=E,AB ≠BA,A 2B 2=B 2A 2并检验(AB )2=A 2B 2是否成立. 解 任取一向量a=(x,y,z),则有 1) 因为A a=(x,-z,y), A 2a=(x,-y,-z) A 3a=(x,z,-y), A 4a=(x,y,z)B a=(z,y,-x), B 2a=(-x,y,-z) B 3a=(-z,y,x), B 4a=(x,y,z)C a=(-y,x,z), C 2a=(-x,-y,z) C 3a=(y,-x,z), C 4a=(x,y,z)所以A 4=B 4=C 4=E2) 因为AB (a)=A (z,y,-x)=(z,x,y) BA (a)=B (x,-z,y)=(y,-z,-x) 所以 AB ≠BA 3)因为A 2B 2(a)=A 2(-x,y,-z)=(-x,-y,z) B 2A 2(a)=B 2(x,-y,-z)=(-x,-y,z)所以A 2B 2=B 2A 23) 因为(AB )2(a)=(AB )(AB (a))_=AB (z,x,y)=(y,z,x)A 2B 2(a)=(-x,-y,z)所以(AB )2≠A 2B 23.在P[x] 中,A ')(f x f =),(x B )()(x xf x f = 证明:AB-BA=E证 任取∈)(x f P[x],则有(AB-BA ))(x f =AB )(x f -BA )(x f =A ())(x xf -B ('f ))(x =;)(xf x f +)(x -'xf )(x =)(x f所以 AB-BA=E4.设A,B 是线性变换,如果AB-BA=E,证明:A k B-BA k =k A 1-k (k>1)证 采用数学归纳法. 当k=2时A 2B-BA 2=(A 2B-ABA)+(ABA-BA 2)=A(AB-BA)+(AB-BA)A=AE+EA=2A结论成立.归纳假设m k =时结论成立,即A mB-BA m=m A1-m .则当1+=m k 时,有A 1+m B-BA 1+m =(A 1+m B-A m BA)+(A m BA-BA 1+m )=A m (AB-BA)+(A m B-BA m )A=A m E+m A1-m A=)1(+m A m即1+=m k 时结论成立.故对一切1>k 结论成立. 5.证明:可逆变换是双射.证 设A 是可逆变换,它的逆变换为A1-.若a ≠b ,则必有A a ≠A b,不然设Aa=A b,两边左乘A 1-,有a=b,这与条件矛盾.其次,对任一向量b,必有a 使A a=b,事实上,令A 1-b=a 即可.因此,A 是一个双射.6.设1ε,2ε,K ,n ε是线性空间V 的一组基,A 是V 上的线性变换。
证明:A 是可逆变换当且仅当A 1ε,A 2ε,K ,A n ε线性无关. 证 因A (1ε,2ε,K ,n ε)=(A 1ε,A 2ε,K ,A n ε)=(1ε,2ε,K ,n ε)A故A 可逆的充要条件是矩阵A 可逆,而矩阵A 可逆的充要条件是A 1ε,A 2ε,K ,A n ε线性无关.故A 可逆的充要条件是A 1ε,A 2ε,K ,A n ε线性无关. 7.求下列线性变换在所指定基下的矩阵:1) 第1题4)中变换A 在基1ε=(1,0,0),2ε=(0,1,0),3ε=(0,0,1)下的矩阵;2) [o; 1ε,2ε]是平面上一直角坐标系,A 是平面上的向量对第一和第三象限角的平分线的垂直投影,B 是平面上的向量对2ε的垂直投影,求A,B,AB 在基1ε,2ε下的矩阵; 3) 在空间P [x]n 中,设变换A 为)()1()(x f x f x f -+→ 试求A 在基i ε=!1)1()1(i i x x x +--K (I=1,2,K ,n-1) 下的矩阵A;4) 六个函数 1ε=e ax cos bx ,2ε=e axsin bx3ε=x e ax cos bx ,4ε=x e ax sin bx 1ε=221x e ax cos bx ,1ε=21e ax 2x sin bx的所有实数线性组合构成实数域上一个六维线性空间,求微分变换D 在基i ε(i=1,2,K ,6)下的矩阵;5) 已知P 3中线性变换A 在基1η=(-1,1,1),2η=(1,0,-1),3η=(0,1,1)下的矩阵是⎪⎪⎪⎭⎫⎝⎛-121011101求A 在基1ε=(1,0,0),2ε=(0,1,0),3ε=(0,0,1)下的矩阵; 6) 在P 3中,A 定义如下:⎪⎩⎪⎨⎧--=-=-=)9,1,5()6,1,0()3,0,5(321ηηηA A A 其中⎪⎩⎪⎨⎧-==-=)0,1,3()1,1,0()2,0,1(321ηηη 求在基1ε=(1,0,0),2ε=(0,1,0),3ε=(0,0,1)下的矩阵; 7) 同上,求A 在1η,2η,3η下的矩阵. 解 1)A 1ε=(2,0,1)=21ε+3εA 2ε=(-1,1,0)=-1ε+2ε A 3ε=(0,1,0)= 2ε故在基1ε,2ε,3ε下的矩阵为⎪⎪⎪⎭⎫ ⎝⎛-0011100122)取1ε=(1,0),2ε=(0,1)则A 1ε=211ε+212ε,A 2ε=211ε+212ε故A 在基1ε,2ε下的矩阵为A=⎪⎪⎪⎪⎭⎫⎝⎛21212121又因为B 1ε=0,B 2ε=2ε所以B 在基1ε,2ε下的矩阵为B =⎪⎪⎭⎫⎝⎛1000,另外,(AB )2ε=A (B 2ε)=A 2ε=211ε+212ε所以AB 在基1ε,2ε下的矩阵为AB =⎪⎪⎪⎪⎭⎫⎝⎛210210, 3)因为 )!1()]2([)1(,,!2)1(,,11210----=-===-n n x x x x x x n K K εεεε ,所以A 0110=-=εA 01)1(εε=-+=x x A )!1()]2([)1()!1()]3([)1(1---------=-n n x x x n n x x x n K K ε=)!1()]3([)1(----n n x x x K {)]2([)1(---+n x x }=2-n ε,所以A 在基0ε,1ε,K ,1-n ε下的矩阵为A =⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛011010KK K, 4)因为 D 1ε=a 1ε-b 2ε,D 2ε=b 1ε-a 2ε,6ε D 3ε=1ε+a 3ε-b 4ε, D 4ε=2ε+b 3ε+a 4ε, D 5ε=3ε+a 5ε-b 6ε, D 6ε=4ε+b 5ε+a 6ε,所以D 在给定基下的矩阵为D =⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛---0000000100001000010001a b b a a b b a ab b a, 5)因为(1η,2η,3η)=(1ε,2ε,3ε)⎪⎪⎪⎭⎫⎝⎛--111101011,所以 (1ε,2ε,3ε)=(1η,2η,3η)⎪⎪⎪⎭⎫⎝⎛---101110111=(1η,2η,3η)X ,故A 在基1ε,2ε,3ε下的矩阵为B =X 1-AX=⎪⎪⎪⎭⎫ ⎝⎛--111101011⎪⎪⎪⎭⎫ ⎝⎛-121011101⎪⎪⎪⎭⎫ ⎝⎛---101110111=⎪⎪⎪⎭⎫⎝⎛--203022211.6)因为(1η,2η,3η)=(1ε,2ε,3ε)⎪⎪⎪⎭⎫ ⎝⎛--012110301,所以A (1η,2η,3η)=A (1ε,2ε,3ε)⎪⎪⎪⎭⎫ ⎝⎛--012110301,但已知A (1η,2η,3η)=(1ε,2ε,3ε)⎪⎪⎪⎭⎫ ⎝⎛----963110505故A (1ε,2ε,3ε)=(1ε,2ε,3ε)⎪⎪⎪⎭⎫ ⎝⎛----963110505⎪⎪⎪⎭⎫ ⎝⎛--0121103011-=(1ε,2ε,3ε)⎪⎪⎪⎭⎫ ⎝⎛----963110505⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛---717172717672737371 =(1ε,2ε,3ε)⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛-----72471872772757472072075 7)因为(1ε,2ε,3ε)=(1η,2η,3η)⎪⎪⎪⎭⎫ ⎝⎛--0121103011-所以A (1η,2η,3η)=(1η,2η,3η)⎪⎪⎪⎭⎫ ⎝⎛--0121103011-⎪⎪⎪⎭⎫⎝⎛----963110505 =(1η,2η,3η)⎪⎪⎪⎭⎫⎝⎛---011101532。