车牌识别
车牌识别原理

车牌识别原理
车牌识别是指通过图像处理和模式识别技术,对车辆的车牌进行自动识别和文字提取的过程。
其原理可以概括为以下几个步骤:
1. 图像预处理:从摄像头获取的图像需要进行预处理,包括去噪、灰度化、二值化等操作。
去噪主要是为了减少图像中的干扰信息,而灰度化和二值化则是将图像转换为黑白二值图,方便后续处理。
2. 车牌定位:在经过预处理后的图像中,需要找到车牌所在的位置。
常用的方法有基于边缘检测、颜色分析和形状匹配等。
边缘检测可以提取图像中的边缘信息,颜色分析可以根据车牌的颜色特性进行筛选,形状匹配可以通过匹配车牌的形状特征来定位。
3. 字符分割:在定位到车牌后,需要将车牌上的字符进行分割。
常见的方法有基于边缘投影和垂直投影的字符分割算法。
边缘投影是通过检测字符边缘的变化情况来实现分割,垂直投影则是通过统计字符列中像素的数量来实现分割。
4. 字符识别:分割后得到的单个字符需要进行识别。
字符识别主要是通过模式识别技术,例如用神经网络、SVM等算法进
行训练和匹配。
训练集中包含了各种不同字符的样本,识别时将样本与待识别字符进行比对,找到最匹配的字符。
5. 结果输出:识别出的字符需要进行校验和整理,确保识别准
确无误。
最后将识别结果输出为文字或数字,用于后续的车辆管理和系统应用。
综上所述,车牌识别主要通过图像预处理、车牌定位、字符分割、字符识别和结果输出等步骤实现对车牌的自动识别和文字提取。
通过不同的算法和技术优化,可以提高识别的准确率和实时性,提升车牌识别系统的性能和可靠性。
请简述车牌识别的工作过程。

请简述车牌识别的工作过程。
车牌识别是人工智能领域中重要的一部分,也是促进智慧停车技术发展的主要动力。
车牌识别通过触发设备、摄像设备、照明设备、图像采集设备、号码识别处理机、缴费终端等硬件设备以及车牌定位、字符分割、字符识别等软件算法来运作车牌识别过程,具体包含以下七个流程:1.图像采集:车牌识别根据车辆检测方式的不同,图像采集一般分为两种,一种是静态模式下的图像采集,通过车辆触发地感线圈、红外或雷达等装置,给相机一个触发信号,相机在接收到触发信号后会抓拍一张图像,该方法的优点是触发率高,性能稳定,缺点是需要切割地面铺设线圈,施工量大;另一种是视频模式下的图像采集,外部不需要任何触发信号,相机会实时地记录视频流图像,该方法的优点是施工方便,不需要切割地面铺设线圈,也不需要安装车检器等零部件,但其缺点也十分显著,由于算法的极限,该方案的触发率与识别率较之外设触发都要低一些。
2.预处理:车牌识别由于图像质量容易受光照、天气、相机位置等因素的影响,所以在识别车牌之前需要先对相机和图像做一些预处理,以保证得到车牌最清晰的图像。
一般会根据对现场环境和已经拍摄到的图像的分析得出结论,实现相机的自动曝光处理、自动白平衡处理、自动逆光处理、自动过爆处理等,并对图像进行噪声过滤、对比度增强、图像缩放等处理。
去噪方法有均值滤波、中值滤波和高斯滤波等;增强对比度的方法有对比度线性拉伸、直方图均衡和同态滤波器等;图像缩放的主要方法有最近邻插值法、双线性插值法和立方卷积插值法等。
3.车牌定位:车牌识别从整个图像中准确地检测出车牌区域,是车牌识别过程的一个重要步骤,如果定位失败或定位不完整,会直接导致最终识别失败。
由于复杂的图像背景,且要考虑不清晰车牌的定位,所以很容易把栅栏,广告牌等噪声当成车牌,所以如何排除这些伪车牌也是车牌定位的一个难点。
为了提高定位的准确率和提高识别速度,一般的车牌识别系统都会设计一个外部接口,让用户自己根据现场环境设置不同的识别区域。
车牌识别方法研究

车牌识别方法研究
车牌识别是指通过对车辆的摄像图像进行处理和分析,从中提取出车牌的字符信息的技术。
目前常见的车牌识别方法主要有以下几种:
1. 预处理与分割:首先对原始图像进行灰度化、二值化等预处理操作,然后通过图像处理方法将车牌从整个图像中分割出来。
常用的分割方法包括基于边缘检测、基于颜色信息和基于投影等。
2. 字符识别:对分割出来的车牌字符进行识别。
常见的方法有基于特征提取的方法(如垂直投影、水平投影、方向梯度直方图等)、基于模板匹配的方法(如字符模板匹配、神经网络等)和基于机器学习的方法(如支持向量机、深度学习等)。
3. 后处理:对字符识别结果进行一系列的后处理操作,如字符校验、连通分析、汉字匹配等,以提高识别准确率。
近年来,随着计算机视觉和深度学习技术的快速发展,车牌识别的准确率和鲁棒性得到了显著提高。
例如,基于卷积神经网络(CNN)的端到端车牌识别系统在准确率上往往表现出色。
此外,车牌识别方法还需要考虑到不同地区和国家的车牌特点,因为不同地区的车牌校验位数、字体、颜色等都有差异,需要针对不同的国家和地区进行适配。
各省普通车牌识别

各省普通车牌识别:北京市(京)京A、京C、京E、京F、北京市(城区),京G 北京市(远郊区),京B 出租车,京O J车天津市(津)津A、津B、津C、津E 出租车上海市(沪)沪A、沪B、沪D 上海市区,沪C 远郊区重庆市(渝)渝A 重庆市区(江南),渝B 重庆市区(江北),渝C 永川区,渝F 万州区,渝G 涪陵区,渝H 黔江区河北省(冀)冀A 石家庄,冀B 唐山,冀C 秦皇岛,冀D 邯郸,冀E 邢台,冀F 保定,冀G 张家口,冀H 承德,冀J 沧州,冀R 廊坊,冀T 衡水河南省(豫)豫A 郑州,豫B 开封,豫C 洛阳,豫D 平顶山,豫E 安阳,豫F 鹤壁,豫G 新乡,豫H 焦作,豫J 濮阳,豫K 许昌,豫L 漯河,豫M 三门峡,豫N 商丘,豫P 周口,豫Q 驻马店,豫R 南阳,豫S 信阳,豫U 济源云南省(云)云A 昆明,云B 东川,云C 昭通,云D 曲靖,云E 楚雄彝族,云F 玉溪,云G 红河哈尼族,云H 文山壮族苗,云J 思茅,云L 大理白族,云K 西双版纳,云M 保山,云N 德宏傣族,云P 丽江,云Q 怒江僳族,云R 迪庆藏族,云S 临沧辽宁省(辽)辽A 沈阳,辽B 大连,辽C 鞍山,辽D 抚顺,辽E 本溪,辽F 丹东,辽G 锦州,辽H 营口,辽J 阜新,辽K 辽阳,辽L 盘锦,辽M 铁岭,辽N 朝阳,辽P 葫芦岛,辽V 省直机关黑龙江省(黑)黑A 哈尔滨,黑B 齐齐哈尔,黑C 牡丹江,黑D 佳木斯,黑E 大庆,黑F 伊春,黑G 鸡西,黑H 鹤岗,黑J 双鸭山,黑K 七台河,黑L 松花江行署,黑M 绥化,黑N 黑河,黑P 大兴安岭湖南省(湘)湘A 长沙,湘B 株洲,湘C 湘潭,湘D 衡阳,湘E 邵阳,湘F 岳阳,湘G 大庸,湘H 益阳,湘J 常德,湘K 娄底,湘L 郴州,湘M 零陵,湘N怀化,湘P 湘西州安徽省(皖)皖A 合肥,皖B 芜湖,皖C 蚌埠,皖D 淮南,皖E 马鞍山,皖F 淮北,皖G 铜陵,皖H 安庆,皖J 黄山,皖K 阜阳,皖L 宿州,皖M 滁州,皖N 六安,皖P 宣城,皖Q 巢湖,皖R 池州山东省(鲁)鲁A 济南,鲁B 青岛,鲁C 淄博,鲁D 枣庄,鲁E 东营,鲁F 烟台,鲁G 潍坊,鲁H 济宁,鲁J 泰安,鲁K 威海,鲁L 日照,鲁M 莱芜,鲁N 德州,鲁P 聊城,鲁Q 临沂,鲁R 菏泽,鲁U 青岛开发区新疆维吾尔自治区(新)新A 乌鲁木齐,新B 昌吉回族,新C 石河子,新D 奎屯,新E 博尔塔拉,新F 伊犁哈萨,新G 塔城,新H 阿勒泰,新J 克拉玛依,新K 吐鲁番,新L 哈密,新M 巴音郭,新N 阿克苏,新P 克孜勒苏柯,新Q 喀什,新R 和田江苏省(苏)苏A 南京,苏B 无锡,苏C 徐州,苏D 常州,苏E 苏州,苏F 南通,苏G 连云港,苏H 淮阴,苏J 盐城,苏K 扬州,苏L 镇江,苏M 泰州,苏N 宿迁浙江省(浙)浙A 杭州,浙B 宁波,浙C 温州,浙D 绍兴,浙E 湖州,浙F 嘉兴,浙G 金华,浙H 衢州,浙J 台州,浙K 丽水,浙L 舟山江西省(赣)赣A 南昌,赣B 赣州,赣C 宜春,赣D 吉安,赣E 上饶,赣F 抚州,赣G 九江,赣H 景德镇,赣J 萍乡,赣K 新余,赣L 鹰潭湖北省(鄂)鄂A 武汉,鄂B 黄石,鄂C 十堰,鄂D 沙市,鄂E 宜昌,鄂F 襄樊,鄂G 鄂州,鄂H 荆门,鄂J 黄岗,鄂K 孝感,鄂L 咸宁,鄂M 荆州,鄂N 郧阳,鄂P 宜昌,鄂Q 鄂西州广西壮族(桂)桂A 南宁,桂B 柳州,桂C 桂林,桂D 梧州,桂E 北海,桂F 南宁,桂G 柳州,桂H 桂林,桂J 贺州(属梧州),桂K 玉林,桂M 河池,桂L 百色,桂N 钦州,桂P 防城甘肃省(甘)甘A 兰州,甘B 嘉峪关,甘C 金昌,甘D 白银,甘E 天水,甘F 酒泉,甘G 张掖,甘H 武威,甘J 定西,甘K 陇南,甘L 平凉,甘M 庆阳,甘N 临夏回族,甘P 甘南藏族山西省(晋)晋A 太原,晋B 大同,晋C 阳泉,晋D 长治,晋E 晋城,晋F 朔州,晋H 忻州,晋J 吕梁,晋K 晋中,晋L 临汾,晋M 运城内蒙古(蒙)蒙A 呼和浩特,蒙B 包头,蒙C 乌海,蒙D 赤峰,蒙E 呼伦贝尔盟,蒙F 兴安盟,蒙G 锡林郭勒盟,蒙H 乌兰察布盟,蒙J 伊克昭盟,蒙K 巴彦淖尔盟,蒙L 阿拉善盟陕西省(陕)陕A 西安,陕B 铜川,陕C 宝鸡,陕D 威阳,陕E 渭南,陕F 汉中,陕G 安康,陕H 商洛,陕J 延安,陕K 榆林,陕U 省直机关吉林省(吉)吉A 长春,吉B 吉林,吉C 四平,吉D 辽源,吉E 通化,吉F 白山,吉G 白城,吉H 延边朝鲜族福建省(闽)闽A 福州,闽B 莆田,闽C 泉州,闽D 厦门,闽E 漳州,闽F 龙岩,闽G 三明,闽H 南平,闽J 宁德,闽K 省直机关贵州省(贵)贵A 贵阳,贵B 六盘水,贵C 遵义,贵D 铜仁,贵E 黔西南州,贵F 毕节,贵G 安顺,贵H 黔东南州,贵J 黔南州广东省(粤)粤A 广州,粤B 深圳,粤C 珠海,粤D 汕头,粤E 佛山,粤F 韶关,粤G 湛江,粤H 肇庆,粤J 江门,粤K 茂名,粤L 惠州,粤M 梅州,粤N 汕尾,粤P 河源,粤Q 阳江,粤R 清远,粤S 东莞,粤T 中山,粤U 潮州,粤V 揭阳,粤W 云浮,粤X 顺德,粤Y 南海,粤Z港澳进入内地车辆青海省(青)青A 西宁,青B 海东,青C 海北,青D 黄南,青E 海南州,青F 果洛州,青G 玉树州,青H 海西州,西藏(藏)藏A 拉萨,藏B 昌都,藏C 山南,藏D 日喀则,藏E 那曲,藏F 阿里,藏G 林芝四川省(川)川A 成都,川B 绵阳,川C 自贡,川D 攀枝花,川E 泸州,川F 德阳,川H 广元,川J 遂宁,川K 内江,川L 乐山,川Q 宜宾,川R 南充,川S 达县,川T 雅安,川U 阿丵坝藏族,川V 甘孜藏族,川W 凉山彝族,川Z 眉山。
车牌识别流程

车牌识别流程
车牌识别是一种通过图像处理技术识别车辆车牌号码的技术,
它可以广泛应用于停车场管理、交通违章监测、智能交通系统等领域。
下面将介绍车牌识别的流程。
首先,车牌识别的流程通常包括图像获取、图像预处理、车牌
定位、字符分割和字符识别五个步骤。
图像获取是车牌识别的第一步,它通过摄像头获取车辆的图像。
在图像获取的过程中,需要考虑光线、角度、距离等因素,以确保
获取清晰、准确的车牌图像。
接下来是图像预处理,这一步是为了提高车牌图像的质量,包
括去噪、灰度化、边缘检测、图像增强等处理。
通过图像预处理,
可以使车牌图像更加清晰,有利于后续的车牌定位和字符识别。
第三步是车牌定位,也称为车牌检测,其目的是在经过预处理
的图像中准确定位出车牌的位置。
车牌定位通常采用边缘检测、形
态学处理、颜色定位等技术,以找到车牌的位置和大小。
然后是字符分割,即将定位到的车牌图像中的字符进行分割。
字符分割是车牌识别中比较困难的一步,因为不同车牌的字符数量和形状各异,需要通过算法来准确分割出每个字符。
最后一步是字符识别,也称为光学字符识别(OCR),其目的是对分割后的字符进行识别。
字符识别通常采用模式识别和机器学习算法,将字符映射成文本信息。
总的来说,车牌识别流程包括图像获取、图像预处理、车牌定位、字符分割和字符识别五个步骤。
通过这些步骤,可以实现对车辆车牌号码的准确识别,为智能交通系统和车辆管理提供便利。
车牌识别
一、车牌识别技术:车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。
车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。
它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。
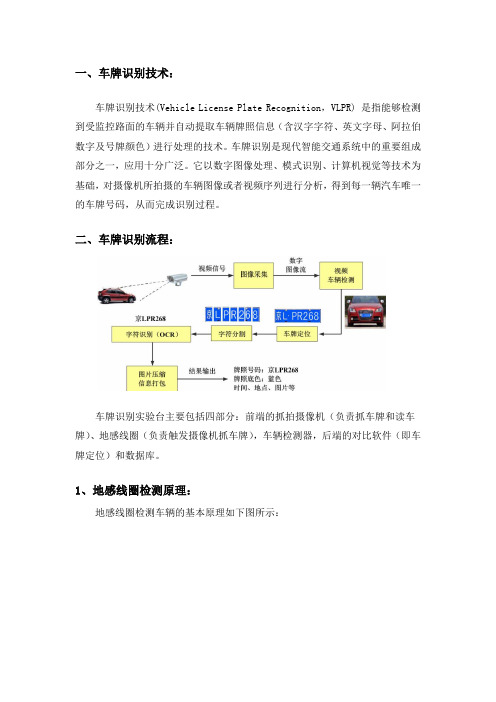
二、车牌识别流程:车牌识别实验台主要包括四部分:前端的抓拍摄像机(负责抓车牌和读车牌)、地感线圈(负责触发摄像机抓车牌),车辆检测器,后端的对比软件(即车牌定位)和数据库。
1、地感线圈检测原理:地感线圈检测车辆的基本原理如下图所示:地感线圈采用单条多股铜线埋设在车道上的切割槽中,安装时采用螺旋形绕法缠绕4~6圈,两线合并后采用麻花形绕法。
地面切槽长度以车道宽度为准,宽度控制在30~40cm左右。
车辆检测的核心器件是与地感线圈相连接的车辆感应器。
车辆感应器采用先进的锁相环技术。
当线圈上面没有车辆时,车辆感应器和地感线圈之间产生一个平衡点,车辆感应器输出一个低电平到CPU;当地感线圈上面有车辆时,地感线圈形成的磁场分布状况发生改变,车辆感应器输出高电平到CPU。
检测系统通过对两个信号进行检测判断,即可得到所需的车辆检测信号。
2、车牌定位模块:车牌定位识别系统是在软硬件的结构上,利用先进的图像处理模式识别等技术,对采集到的汽车图像进行处理,进而得到相应的车牌图像,以完成车牌的自动识别功能,如下图所示,其主要的两个子系统是车牌的精确定位、分割系统,车牌字符的分割、识别系统.2.1图像预处理车牌的准确定位是识别的关键,当利用摄像机采集图像时,由于角度、光照等影响,采集到的图像信息往往很复杂,质量不高,为了精确的实现定位,就必须对图像进行预处理.汽车图像预处理包括:彩色图像的灰度化、二值化,其目的是为是减少原始图像中的复杂信息,使得车牌定位算法更为简单,速度更快。
车牌识别系统功能和参数
车牌识别系统功能和参数车牌识别系统是一种用于自动识别和识别出车辆号牌的技术。
它利用计算机视觉和模式识别的原理和技术,通过图像处理和特征提取等方法,从输入的图像中提取车牌号码并进行识别。
车牌识别系统主要可以分为图像采集、车牌定位、字符分割、字符识别和车牌识别五大模块。
首先,车牌识别系统的功能包括图像采集、车牌定位、字符分割、字符识别和车牌识别等。
通过图像采集模块,可以采集到来自摄像头或其他图像输入设备的车辆图像。
车牌定位模块可以对车辆图像进行处理,找出图像中的车牌位置。
字符分割模块可以将车牌图像中的字符进行分割,从而得到单个字符图像。
字符识别模块使用OCR(光学字符识别)技术,对字符进行识别,并将字符的识别结果输出。
最后,车牌识别模块通过将字符的识别结果进行组合,得到完整的车牌号码,并输出识别结果。
1.图像采集参数:包括图像分辨率、拍摄角度、曝光度、对比度等。
合理的图像采集参数可以保证车牌在图像中的清晰可见性,减少图像中的噪声和干扰。
2.车牌定位参数:包括车牌的位置、大小、高度、宽度等。
通过调整车牌定位参数,可以准确地找到车牌在图像中的位置,排除其他干扰因素。
3.字符分割参数:包括字符之间的间距、字符的大小、字符的高度、宽度等。
合适的字符分割参数可以确保字符之间的距离和大小符合标准,并准确地划分字符。
4.字符识别参数:包括字符模板库、字符识别算法、识别率等。
良好的字符识别参数可以提高字符识别的准确度和速度。
5.车牌识别参数:包括车牌识别算法、车牌号码格式、识别结果输出等。
优化的车牌识别参数可以保证系统对各种车牌号码的识别正确率,快速地输出识别结果。
除了以上几个参数之外,还有一些额外的参数可以用于进一步优化系统的性能,如图像预处理参数、特征提取参数、分类器参数等。
这些参数的选择和调整可以根据实际应用需求和系统性能要求进行调整。
总之,车牌识别系统的功能和参数都是为了实现车牌号码的自动识别和识别而设计的。
车牌识别标准国家标准
车牌识别标准国家标准车牌识别技术是一种通过图像处理和模式识别技术,对车辆的车牌进行自动识别和提取的技术。
随着交通管理的信息化和智能化发展,车牌识别技术在交通管理、安防监控、停车管理等领域得到了广泛的应用。
为了规范车牌识别技术的应用和推动行业的发展,国家制定了一系列的车牌识别标准,以保障车牌识别设备的性能稳定和识别准确度。
首先,车牌识别标准国家标准对车牌识别设备的性能指标进行了明确规定。
其中包括对图像采集、图像处理、字符识别等方面的技术要求。
例如,对于图像采集,标准规定了在不同光照条件下的图像采集要求,以确保在各种环境下都能够获取清晰的车牌图像;对于字符识别,标准规定了识别准确率、识别速度等指标,以保证车牌识别的准确性和实时性。
其次,车牌识别标准国家标准对车牌识别系统的数据格式和接口进行了规范。
这些规范包括车牌数据的存储格式、传输格式、接口协议等方面。
通过统一的数据格式和接口规范,不同厂家生产的车牌识别设备可以实现互联互通,提高了设备之间的兼容性和互操作性,为车牌识别技术的推广应用提供了便利。
此外,车牌识别标准国家标准还对车牌识别系统的应用场景和环境进行了规范。
这些规范主要包括对车牌识别设备的安装位置、安装高度、安装角度等方面的要求。
通过规范车牌识别设备的安装,可以提高车牌识别的准确性和稳定性,保证车牌识别系统在各种复杂环境下都能够正常工作。
总的来说,车牌识别标准国家标准的制定,对车牌识别技术的发展起到了积极的推动作用。
这些标准的实施,不仅提高了车牌识别设备的性能和稳定性,也促进了车牌识别技术在各个领域的应用。
未来,随着车牌识别技术的不断创新和发展,相信车牌识别标准国家标准也会随之不断完善,为车牌识别技术的应用提供更加有力的支持。
在实际应用中,我们需要严格按照国家标准进行车牌识别设备的选择和使用,确保设备的性能和技术指标符合国家标准的要求。
同时,也需要加强对车牌识别技术的研发和创新,不断提高识别准确率和识别速度,为交通管理、安防监控、停车管理等领域提供更加高效、便捷的解决方案。
车牌识别准确率测试方法
车牌识别准确率测试方法
车牌识别准确率测试方法通常包括以下步骤:
1. 数据收集:收集一组车牌图像数据集,包括不同光照条件、角度、距离等多样性。
确保数据集足够大且具有代表性。
2. 数据预处理:对数据集进行预处理,包括图像裁剪、尺寸统
一、降噪等操作,以保证图像的质量和一致性。
3. 数据分割:将预处理后的图像进行车牌分割,将车牌区域提取出来。
确保分割准确且不会出现遗漏或错误。
4. 特征提取:对车牌图像进行特征提取,例如提取字符区域的颜色、纹理、形状等特征。
这些特征可以用作后续分类算法的输入。
5. 分类算法:选择适当的分类算法,例如支持向量机(SVM)、卷积神经网络(CNN)等,用于将车牌识别为具体的字符序列。
6. 准确率评估:使用准确率作为评估指标来评估识别算法的性能。
将算法对测试集中的车牌图像进行识别,并将识别结果与真实标签进行比较,计算准确率。
它可以通过以下公式进行计算:
准确率 = 正确识别的车牌数量 / 总测试车牌数量
7. 交叉验证:为了提高评估结果的可信度,可以使用交叉验证方法来验证识别算法的稳定性和鲁棒性。
将数据集分为训练集和测试集,多次随机划分并进行测试,取平均准确率作为最终评估结果。
需要注意的是,在测试过程中应当充分考虑各种影响因素,例如光照变化、车牌质量、遮挡等。
此外,还可以使用混淆矩阵、精确度-召回率曲线等方法来进一步评估识别算法的性能和稳
定性。
中国车牌识别大全
中国车牌号识别大全(含军、警车)1.车牌基础知识1.“军”:军车车牌。
2.“O”:省级公安厅专用车牌,如:京O为北京市公安厅。
3.“U”:省委、省级政府专用车牌,如:鲁U为山东省政府。
4.“使”:为外国驻华使馆专用车牌,如“使196-013”为韩国使馆车辆5.“T”:出租车,如:陕A-T1234为西安市出租车。
但北京市出租车为“京B”。
6.车牌底色为黑色的是外籍汽车。
7.车牌样式◆大型民用汽车,牌照为朱红底,白字。
◆小型民用汽车,牌照为中绿底,白字。
◆公安专用汽车,牌照为白底,红“GA”,黑字。
◆武警专用汽车,牌照为白底,红“WJ”,黑字。
◆大使馆外籍汽车,牌照为黑底,白字及空心“使”字标志。
◆领事馆外籍汽车,牌照为墨底,白字及空心“领”字标志。
◆其他外籍汽车,牌照为黑底白字。
◆试车牌照为蓝底白字,数字前有“试”字标志。
◆学习车牌照为蓝底白字,数字前有“学”字标志。
◆临时牌照为白底红字,数字前有“临时”二字。
◆汽车补用牌照,为白底黑字。
◆车辆“移动证”,为白底红字。
◆民用汽车牌照上有两行字,上面一行小字是省、直辖市、自治区的名字和发证照及监管机关的代号,编号从01-99。
◆民用汽车编号,一般为5位数字,即从00001-99999。
◆编号超过十万时,就用A、B、C等英文字母代替。
2.军车牌A:97式"97式"格式是甲A-12345,第一部分:为中文\"天干地支\",代表解放军军种序列:甲――解放军总部(总参谋部、总政治部、总后勤部)乙――集团军丙――通信和运输己――沈阳军区庚――北京军区辛――兰州军区壬――济南军区寅――南京军区辰――成都军区戍――广州军区午――空军未――海军申――总装备部第二部分:为英文字母,代表下属分类(不全):A――司令部、总部B――政治部C――后勤部D――装备部G――省军区H――仓库、干休所K――驻当地铁路、航空、水运单位军代处P――医院及医卫院校S――后勤工厂第三部分:五位数字就是军事秘密,省军区第一位是序号,如广州军区下辖湖北、湖南、广东、广西、海南各省军区分别是\"戍G\"1、2、3、4、5字头。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
牌照识别过程中,牌照颜色的识别依据算法不同,可能在上述不同步骤实现,通常与牌照识别互相配合、互相验证。
(1)牌照定位:
自然环境下,由于汽车图像背景复杂、光照不均匀等原因,如何在自然背景中准确地确定牌照区域是整个识别过程的关键。一般采用的方案是首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图象中分割出来。通过以上步骤,牌照一般能够被定位。
3.2 原始图像
3.3灰度化后的图像
3.1.2图像的边缘检测
在Matlab中利用函数edge()实现边缘检测,具体的用法如下所示: Car_Image_Bin=edge(Car_Image_Gray,'robert',0.15,'both');
在edge()函数中有Sobel算子,Prewitt算子,Roberts算子,Log算子,Canny算子及Robert算子,几种算法相比之下,Roberts算子是一种最简单的算子,是一种利用局部差分算子寻找边缘的算子,他采用对角线方向相邻两象素之差近似梯度幅值检测边缘。检测垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感,无法抑制噪声的影响。因此本课题使用了Robert算子。
Car_Image_RGB=imread(‘Image_Name’);
即可将图像读取出来,这样读取得到的是RGB图像,RGB图像分别用红、绿、蓝三个色度值为一组代表每个像素的颜色,因此Car_Image_RGB是一个错误!未找到引用源。的数组,m、n表示图像像素的行、列数。
3.1.1图像灰度图转化
我国车牌颜色及其RGB值如下,蓝底(0,0,255)白字(255,255,255)、黄底(255,255,0)黑字(0,0,0)、黑底(0,0,0)白字(255,255,255)、红底(255,0,0)黑字(0,0,0),由于车牌的底色不同,所以从RGB图像直接进行车牌区域提取存在很大困难,但不管哪种底色的车牌,其底色与上面的字符颜色的对比度大,将RGB图像转化成灰度图像时,车牌底色跟字符的灰度值会相差很大。例如蓝色(255,0,0)与白色(255,255,255)在R通道中并无区分,而在G、R 通道或是灰度图象中数值相差很大。同理对白底黑字的牌照可用R 通道,绿底白字的牌照可以用G 通道就可以明显呈现出牌照区域的位置,便于后续处理。原图、灰度对于将彩色图象转换成灰度图象时,图象灰度值H可由下面的公式计算:
3
图像读取及车牌区域提取主要有:图像灰度图转化、图像边缘检测、灰度图腐蚀、图像的平滑处理以及车牌区域的边界值计算。其程序流程图如下:
输入车牌图像
灰度校正
平滑处理
提取边缘
3.1 预处理及边缘提取框图
目前比较常用的图像格式有*.BMP、*.JPG、*.GIF、*.PCX、*.TIFF 等,本课题 采集到的图片是*.JPG 的格式。因为使用*.JPG图像时有一个软件开发联合会组织制定、有损压缩格式,能够将图像压缩在很小的储存空间,而且广泛支持 Internet 标准,是面前使用最广的图片保存和传输格式,大多数摄像设备都以*.JPG格式保存。利用图像工具箱的
2
一个完整的车牌号识别系统要完成从图像采集到字符识别输出,过程相当复杂,基本可以分成硬件部分跟软件部分,硬件部分包括系统触发、个车牌识别系统的基本结构如图2.1所示:
图2.1车牌识别系统基本结构框图
一:原始图像:由停车场固定彩色摄像机、数码相机或其他扫描装置拍摄到的图像。
figure(6),imshow(I5);title('形态滤波');
[y,x,z]=size(I5);
myI=double(I5);
%begin横向扫描
tic
white_y=zeros(y,1);
for i=1:y
for j=1:x
if(myI(i,j,1)==1)
%如果myI(i,j,1)即myI图像中坐标为(i,j)的点为白色
图3.6 定位剪切后的图
4
function [d]=main(jpg)
I=imread('car.jpg');
figure(1),imshow(I);title('原图');
I1=rgb2gray(I);
figure(2),subplot(1,2,1),imshow(I1);title('灰度图');
五:字符识别:利用模板匹配的方法与数据库中的字符进行匹配从而确认出字符。
六:输出结果:得到最后的汽车牌照,包括汉字、字母和数字。
车牌号图像识别要进行牌照号码、颜色识别 。为了进行牌照识别,需要以下几个基本的步骤:
a.牌照定位,定位图片中的牌照位置;
b.牌照字符分割,把牌照中的字符分割出来;
c.牌照字符识别,把分割好的字符进行识别,最终组成牌照号码。
使用边缘检测,腐蚀效果如图3.4所示:
图3.4 边缘效果图
从边缘效果图可以看出,经过处理以后车牌的轮廓已经非常明显了,车牌区域及汽车标志的边缘呈现白色条纹,基本上达到了边缘检测的效果。但是,在车牌附近的其他区域也由于各种干扰的影响,也存在一些白色区域。所以要对图像做进一步的处理,用灰度图腐蚀来消除多余的边界点。
figure(4),imshow(I3);title('腐蚀后图像');
se=strel('rectangle',[40,40]);%生成一个矩阵
I4=imclose(I3,se); %闭运算
figure(5),imshow(I4);title('填充图像');
I5=bwareaopen(I4,2000);
Car_Image_Erode=imerode(Car_Image_Bin,Se);
其中结构元素Se又被形象成为刷子,用于测试输入图像,一般比待处理图像小很多。结构元素的大小形状任意,一般是二维的。二维结构元素为数值0和1组成的矩阵,结构元素中数值为1的点决定结构元素的领域像素在进行腐蚀操作时是否需要参加运算。结构元素太大,会造成腐蚀过度,造成信息丢失,太小起不了预期的效果,这里使用矩阵的线性结构元素,Se=[1:1:1]。腐蚀后如图:
(3)牌照字符识别:
字符识别方法目前主要得算法有两种即基于模板匹配算法和基于人工神经网络算法。基于模板匹配算法首先将分割后的字符二值化,并将其尺寸大小缩放为字符数据库中模板的大小,然后与所有的模板进行匹配,最后选最佳匹配作为结果。基于人工神经元网络的算法有两种: 一种是先对待识别字符进行特征提取,然后用所获得特征来训练神经网络分配器;另一种方法是直接把待处理图像输入网络,由网络自动实现特征提取直至识别出结果。实际应用中,牌照识别系统的识别率与牌照质量和拍摄质量密切相关。牌照质量会受到各种因素的影响,如生锈、污损、油漆剥落、字体褪色、牌照被遮挡、牌照倾斜、高亮反光、多牌照、假牌照等等;实际拍摄过程也会受到环境亮度、拍摄亮度、车辆速度等等因素的影响。这些影响因素不同程度上降低了牌照识别的识别率,也正是牌照识别系统的困难和挑战所在。为了提高识别率,除了不断的完善识别算法,还应该想办法克服各种光照条件,使采集到的图像最利于识别。
二:图像预处理:对动态采集到的图像进行滤波,边界增强等处理以克服图像处理。
三:车牌位置提取:通过运算得到图像的边缘,再计算边缘图像的投影面积,寻找谷峰点以大概确定车牌的位置,再计算连通域的宽高比,剔除不在阈值范围内的连通域,最后便得到了车牌区域。
四:字符分割:利用投影检测的字符定位分割方法得到单个的字符。
(2)牌照字符分割 :
在完成牌照区域的定位后,还需要将牌照区域分割成单个字符,然后进行字符识别,最后输出结果。字符分割一般采用垂直投影法。垂直投影法的原理是由于字符在垂直方向上的投影必然在字符间或字符内的间隙处取得局部最小值的附近,并且这个位置应满足牌照的字符书写格式、字符、尺寸限制和一些其他条件。所以利用垂直投影法对复杂环境下的汽车图像的字符分割有较好的效果。
车牌识别系统
1
随着我国公路交通事业的发展,车辆的数量正在迅速增长,在给出行提供方便的同时,车辆管理上存在的问题日益突出,人工管理的方式已经不能满足实际的需要。微电子、通信和计算机技术在交通领域的应用极大地提高了交通管理效率。作为信息来源的自动检测、图像识别技术越来越受到人们的重视。近年来计算机的飞速发展和数字图像技术的日趋成熟,为传统的交通管理带来巨大转变,先进的计算机处理技术,不但可以将人力从繁琐的人工观察、监测中解放出来,而且能够大大提高其精确度,汽车牌照自动识别系统就是在这样的背景与目的下进行开发的。汽车牌照等相关信息的自动采集和管理对于交通车辆管理、园区车辆管理、停车场管理、交警稽查等方面有着十分重要的意义,成为信息处理技术的一项重要研究课题。
3.1.3灰度图腐蚀
所谓腐蚀即一种消除边界点,使边界向内部收缩的过程。利用它可以消除小而且 无意义的物体。腐蚀的规则是输出图像的最小值是输入图像领域中的最小值,在一个二值图像中,只要有一个像素值为0,则相应的输出像素值为0。假设B对X腐蚀所产生的二值图像E是满足以下条件的点(x,y)的集合:如果B的原点平移到点(x,y),那么B将完全包含于X中。本系统使用imerode()函数,