9. 变换域算法
基于小波变换的彩色图象数字水印算法
维普资讯
第 3 卷 (06 第 4期 4 20 )
计算 机与数字工程
5 9
基 于小波变换 的彩色 图象数字水 印算法 。
严继利
( 宁石油化工大学 辽 摘
陈明 明
抚顺 130 ) 10 1
要 : 出了一种基于离散小波变换 ( WT 域 的彩色图象序列加密数字水印新方法 , 提 D ) 算法选用 了彩 色图象 R B色彩 G
s na i r w t m ri ga adecytt y q ec ae o sc e r ts m eddioGcm oet R Bcl c i n y a rakn s nln r ib s unebsdo g t feiie bd e n o pnn o G o s e g ba e gi n p ae nl i b o i t f o rp a
e pi na eu t s o ta tewa r akn r vs l d rb s a an t os d c mmo l s d i g e—p o e s g meh d u h a xr me tlrs l h w th tm r ig a ii i ea u t i s n i a o s h e e n b n o g en nyu e mn rc si t s sc s n o
不同变换域下LMS算法收敛性能分析
WE u -e g Q i I oh n , U Y G ( . o eeo l t ncE g er g aa U i ri f n i ei , h n4 0 3 , hn ) 1 C lg f e r i ni ei ,N vl nv syo g er g Wu a 3 0 3 C ia l E co n n e t E n n
3域变换算法及收敛分析域变换的基本思想是通过正交变换以降低其自相关程度并在变换域递归的估计各个采样点的功率从而对自适应滤波器的各个权系数采用归一化的收敛因子使各个权系数都获得最佳的收敛速度一13
维普资讯
第2 9卷 第 6期 20 0 7年 1 2月
舰
船
t i a e . W e s e i h e s— a - q a e a a tto lo ih frty, n h o v r e c f L S s h sp p r p cf t e l a tme n s u r d p ai n a g rt m sl a d t e c n e g n e o M i y i
最 后 提 出 了未来 自适 应 滤 波 算 法 发 展 方 向。
关键 词 : L ; MS 自适应 滤波 ; 变换 域 中图分 类号 : T 9 l N 1 文献标 识码 : A
文章编 号 : l7 6 2—7 4 (0 7 0 0 9 0 DOI1 . 4 4 ji n 17 7 4 . 0 7 0 . 2 6 9 2 0 ) 6— 0 4— 4 :0 3 0 /、s .6 2— 6 9 2 0 . 6 0 1 s
摩尔纹图案自动去除技术综述

摩尔纹图案自动去除技术综述摩尔纹(Moiré)是指在两个相互覆盖的网格或图案上产生的干涉效应,形成一种看起来像波纹或螺旋的图案。
在电子图像处理和打印领域中,摩尔纹是一个常见的问题,会导致图像质量下降甚至无法辨认。
为了解决这个问题,许多自动去除摩尔纹技术被提出和研究。
一、背景介绍摩尔纹图案最初是由法国物理学家阿西尔·摩尔(A. F. Moiré)在19世纪发现的,它在许多领域都有广泛应用,如纺织、印刷和计算机领域。
然而,在数字图像处理领域中,摩尔纹通常被认为是一种噪声或干扰,需要通过自动化的方式进行去除。
二、摩尔纹的成因摩尔纹的产生是由于两个具有不同频率的图案或网格之间的相互作用。
当这两个图案或网格交叠时,会产生干涉效应,形成摩尔纹。
例如,在打印过程中,图像的像素点和打印机墨点的排列方式可能会导致摩尔纹的产生。
三、摩尔纹去除技术1. 频域滤波法频域滤波法是一种常用的去除摩尔纹的方法。
它通过将图像转换到频域进行处理,利用滤波器降低摩尔纹的干扰。
常用的频域滤波方法包括傅里叶变换和小波变换。
这些方法可以通过选择适当的滤波器来减少摩尔纹。
2. 双图像差异法双图像差异法是另一种常见的去除摩尔纹的方法。
该方法通过获取两幅存在摩尔纹的图像,再进行相减操作,得到一个差异图像。
差异图像中的摩尔纹将被消除或减弱,从而得到去除摩尔纹的图像。
3. 模拟图案去除法模拟图案去除法是一种基于纹理分析的方法。
该方法通过分析图像中的纹理特征,识别和去除摩尔纹所在的区域。
这种方法通常结合图像分割和纹理分析算法,能够有效地去除摩尔纹。
4. 变换域方法变换域方法是一种基于数据变换的去除摩尔纹技术。
该方法通过将图像转换到一种特定的域,如小波域或空间域,并利用变换的特性去除摩尔纹。
这种方法通常需要对图像进行多个变换和逆变换操作,以达到去除摩尔纹的效果。
四、应用领域摩尔纹自动去除技术在许多领域都有广泛应用。
在计算机图形学中,去除摩尔纹可以提高图像的质量,减少视觉疲劳。
OFDM中基于变换域DFT信道估计算法研究

舰 船 电 子 工 程
S hi p El e c t r o n i c En g i n e e r i n g
Vo 1 . 3 3 No . 1
5 7
பைடு நூலகம்
2 0 1 3年第 1 期
OF D M 中基 于变 换 域 D F T信 道 估 计 算 法研 究
DU Yo ng f e ng
( The P ub l i c S e c u r i t y Po l i c e I ns t i t u t e ,El e c t r o n i c Te c h n o l o g y De p a r t me n t ,N i n g b o 3 1 5 8 0 1 )
Ke y W or ds OF DM ,c h a n n e l e s t i ma t i o n,DFT ,no n - i n t e g e r - s a mpl e s p a c e Cl a s s Nu mb er TN9 ] 5
1 引 言
Abs t t ac t Ai me d a t t h e c o mb p i l o t — a s s i s t e d OFDM s y s t e ms .a n i mp r o v e d c h a n n e I e s t i ma t i o n me t h o d b a s e d o n t r a n s f o r l T l d o ma i n DFT i S pr o p o s e d . Th e e n e r g y l e a k a g e o f c h a nn e l i mpu l s e r e s p o n s e c a us e d b y n o n - i n t e ge r - s a mp l e s p a c e c a n b e d e c r e a s e d e f f e c t i v e l y b y p r o p e r l y c h o o— s i n g t h e z e r o — p a d d i n g p o s i t i o n .A t t h e s a me t i me ,n e g l e c t i n g t h o s e n o n s i g ni f i c a n t c h a n n e l t a p s c o nt a i ni ng mo r e n o i s e t h a n c h a nn e l p o we r e n — e r gy c a n r e d u c e t he n o i s e e f f e c t a n d l e a d t O s o me pe r f o r ma n c e i mp r o v e me n t ,e s p e c i a l l y f o r l o w S NR v a l u e s .S i mu l a t i o n r e s ul t s s h o w t h a t t he i mpr o ve d c h a n n e l e s t i ma t i o n me t h o d o ut p e r f o r ms c o n v e nt i o na l f r e q u e nc y — d o ma i n i n t e r p o l a t i o n me t ho d s a n d t h e o r i g i n a 1 z e r o — pa d d i n g me t h o d s a n d i s p r o mi s i ng f o r p r a c t i c a l a p p l i c a t i o n s .
变换域数字图像水印算法探究

兰 州 商 学 院 学 报
20 年 第4 0 6 期
号的空间分辨率大于对色度信号的空间分辨率。图 叶变换( F )小波变换、 DT 、 分形变换及倒谱变换等。 像的边缘信息对视觉很 重要 , 特别是边缘的位置信 三、 字 图像水 印的空 间域算 法 数 息。人眼容易感觉到边缘 的位置变化 , 而对于边缘 LB是 一 种 空 间 域 数 据 隐 藏 方 法 , i l S Tr e与 k 的灰度误差并不敏感。人眼的视觉掩盖效应是一种 Shae先后利用此方法将特定 的标记隐藏于数字 cydl 局部效应 , 受背景强度 、 纹理复杂性和信号频率的影 音频和数字图像原数据的最低几位 中。L B方法 的 S 响。具有不同局部 特性 的区域 , 在保证不被人眼察 优点是信息量大 、 印透 明性好 , 该方法极 为脆 水 但 觉的前提下 , 允许改变的信号强度不同 。 J 弱, 鲁棒性较差 , 无法经受有损或无损的信 息处理 。
变 换 域 数 字 图 像 水 印 算 法 探 究‘
● 曹 晓 军
( 兰州商学院 信息工程 学院, 甘肃 兰州 702 ) 30 0
摘 要 :随着数字水印技术的发展 , 数字图像水印算法便层 出不穷。本文首先将数字水印算法从实现的角度分
为空间域 算法和 变换域 算法两大类 , 然后对 变换 域的算法从 离 余 弦变换 ( C ) 离散傅 立 叶 变换 ( F ) 小波变 散 DT、 Dr、 换、 分形 变换及倒谱 变换等方 面检 索了相 关文献 , 对各种算 法进行 了尝试性 分析和探 讨 。
rn fr a d c p tu d ma a s m ta aom n e sr m o in t n f r . r o
Ke r s dg a gew t akn ; பைடு நூலகம் D T; WT: rca t nf ;cpt m ywod :i t i i l ma a r rig D T; P D e m Fat as r lr o m esu r
一种基于神经网络的变换域数字水印提取算法

( eat n o o p tr n ne n ,O nneE g er gC l g ,S iah ag 0 00 ,C ia D pr t f m ue E g er g r ac n ne n o ee hj zu 5 0 3 hn ) me C i i d i i i n
鲁棒性 。
关键词 :数字水印 ;神经 网络 ;变换域 中图分类号 :T 9 17 N 1.3 文献标识码 :A
An Ex r c i g Alo i m o g t lW a e ma k n t a tn g rt h f r Dii a tr r i g
S se n a so m m an Ba e n Ne r lNe wo k y tm i Tr n f r Do i s d o u a t r
维普资讯
第 1 第 3期 8卷 20 0 6年 6月
军
械
工
程
学
院
学
报
V L 1 . o 8 No 3
J un l fOrn n eEn ie r gColg o r a d a c gn ei l e o n e
Jn u .,2 0 06
段得 到 了广泛 的研究 和应 用 。 现 有 的 图 像 数 字 水 印算 法 基 本 上 可 以分 为 两
类 : 间域 方法 和 变换 域 方法 。 , 一基 于神 经 网络 的水 印提 取算 法 能 够 提 高 这
对旋转 、 拉伸 、 剪切 、 E J G压缩 、 P 中值滤波等常见攻
Ke o d :dgt a r akn ;n ua e ok r s r o an yw r s i a w t r ig e r nt r ;t fm d m i il e m l w n a o
遥感数字图像处理-第4章 变换域处理方法

颜色空间中的颜色通常用代表3个参数的3维坐标来描述, 其颜色要取决于所使用的坐标。大部分遥感数据都采用 RGB颜色空间来描述,但对图像进行一些可视分析时,也 会使用其他颜色空间(如HSI模型)。
10
七、颜色空间变换
颜色空间分类
第4章
变换域处理方法
为什么要进行变换域处理?
换一个角度来看数字图像
空间域图像直观地为我们提供了丰富的空间和数字信息, 但如果我们将空间域图像进行某种变换,将会较为容易地 识别出一些在原始图像上无法直观看到的信息,从而有利 于图像的后续处理。
介绍常用的数字图像变换算法原理及其应用,旨 在为后续章节的图像变换域处理提供基础。
用三棱镜! 如果想把一段音频文件不同频率的声音检测出来怎么办?
用傅立叶变换!
8
六、小波变换
小波变换与傅里叶变换类似,都是把一个信号分解成一组 正交信号,但不同于傅里叶变换中使用的三角函数,小波 变换是用由零开始由零结束、中间为一段震荡的波来表示 信号,它是一种能量在时域非常集中的波。
9
七、颜色空间变换
“鸡尾酒会问题”
在嘈杂的鸡尾酒会上,许多
(Cocktail Party Problem) 人在同时交谈,可能还有背
景音乐,但人耳却能准确而
清晰的听到对方的话语。
从混合声音中选择自己感兴 趣的声音而忽略其他声音的 现象
7
五、傅里叶变换
人的视觉系统时时刻刻都在进行“分离信号”这种行为:看 见不同的颜色,听到不同频率的声音,甚至尝到酸甜苦辣咸 这五种不同的味道也是一种识别不同信号的表现。 而傅立叶变换正是一种通过频率来分离不同信号的方法! 如果想把自然光中的七色成分分离出来怎么办?
基于变换域的简化LTE小区搜索算法

电讯技 术
T lc mmu iain E gn e n ee o nc t n ie r g o i
V 15 No 8 o .O . Ag 00 u .2 1
文章 编号 :0 1 9 X(0 0 0 —0 8 —0 10 —83 2 1 )8 0 1 5
~
1d 0 B<S NR <2 B.S h r p s g rtm s o o r cia au r a h e ig c l s ac a ta d d o t e p o o e a o h i f sme p a t l v e f c ivn el e rh fs n d l i c l o
( oeeo fr a o nier g Z e agU i r t o T cnl y H nzo 10 3 C ia C l g f no t nE g ei ,hj n n e i f eh o g , aghu3 0 2 , hn ) l I m i n n i v sy o
Ab t a t T ov e p o lm f o lxt rL E c l s ac ,a lw c mpe i o—ag r h s r p s d i sr c : o s le t rb e o mp e i f T el e rh o lxt c h c yo o y l oi m i p o e t o n
o T c l er h. T e smu ain r s ls c n r ta e p rom a c ft e ag rt m s i r v d wi e fL E els ac h i lto e ut o f m h tt f r n e o h oih i mp o e t t i h e l hh
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
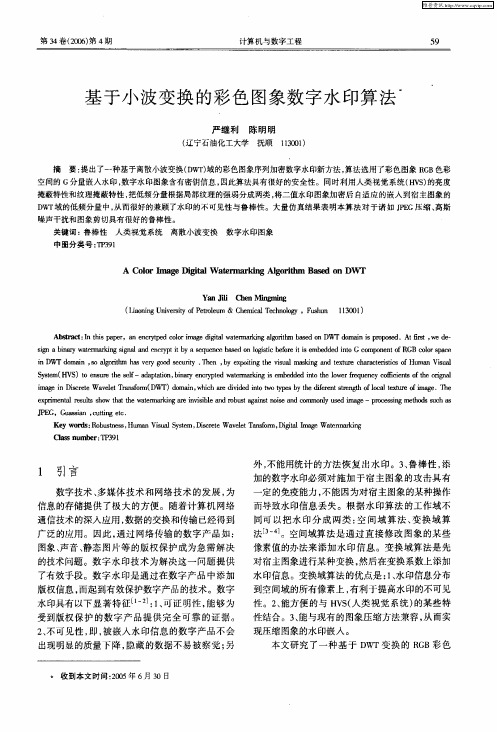
输入信号
串并 转换
器
块FIR 滤波器
并串 转换 器
区分 机制
滤波输出信号
完成块相关 和权值更新
的机制
串并 转换 器
误差信号
期望 响应
L1
wˆ k 1 wˆ k u kL i e kL i
i0
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
M滤波器阶数长度,L为块的长度
y(kL i) wˆ T (k)u(kL i)
用A写出? y k ykL, y kL 1,L , y kL L 1T
中国科学院声学研究所 Institute of Acoustics, CAS
滤波器输出信号
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
L1
块自适应算法 wˆ k 1 wˆ k u kL i e kL i i0
时刻n与块编号k的关系: n kL i i 0,1,L , L 1
第k块的输入数据的矩阵表达式为:
托普利兹矩阵
A(k) u(kL),u(kL 1),L ,u(kL L 1)
u(n) u(n),u(n 1),L ,u(n M 1)T
块自适应算法总结
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
n kL i i 0,1,L , L 1 每来L个数据进行一次操作
A(k) u(kL),u(kL 1),L ,u(kL L 1)
u(n) u(n),u(n 1),L ,u(n M 1)T
频域算法
len=8; vector_u=2*rand(2*len,1)-1; w=[-0.1 0.2 0.7 0.4 -0.2 -0.1 0.12 0.25].'; for j=1:len
A(:,j)=vector_u(j+len:-1:j+1); end y=A'*w;
w_k=fft([w;zeros(len,1)]); u_k=fft(vector_u); y_k=w_k.*u_k; real(ifft(y_k))
end
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
L=M=8实现BLMS算法,其他仿真和LMS算法一致。
for n=1:dotnumber vector_u=[vector_u(2:end);u(n)]; vector_d=[vector_d(2:end);d(n)]; if(mod(n,len)==len-1) for j=1:len A(:,j)=vector_u(j+len:-1:j+1); end vector_y=A'*w; vector_e=vector_d-vector_y; phi=A*vector_e; w=w+mu*phi; end w_error(n)=norm(w-wo)^2;
块自适应算法
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
误差信号:e kL i d kL i y kL i
ek ekL,ekL 1,L ,ekL L 1T
dk d kL, d kL 1,L , d kL L 1T
频域算法
Wˆ
k
FFT
wˆ
k
0
Uk FFT u kM M ,...,u kM 1,u kM ,...,u kM M 1
yT k y kM , y kM 1,..., y kM M 1 IFFT U k e Wˆ k 的最后M 个元素
分别采用:y k AT wˆ (k) 和快速傅立叶变换计算y(k)
中国科学院噪声与振动重点实验室 Key Laboratory of Noise and Vibration Research, CAS
频域与子带算法
吴鸣
中国科学院声学研究所
中国科学院噪声与振动重点实验室
中国科学院声学研究所 Institute of Acoustics, CAS
2018.3.5
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
算法总结
Wˆ
k
1
Wˆ
k
FFT
Φk
0
Φk IFFT conjUk e Ek 的最前M个元素
E
k
FFT
e
0
k
ek dk yk
yT k y kM , y kM 1,..., y kM M 1 IFFT U k e Wˆ k 的最后M 个元素
len=8; vector_u=2*rand(2*len,1)-1; vector_e=2*rand(len,1)-1;
for j=1:len A(:,j)=vector_u(j+len:-1:j+1);
end
e_k=fft([zeros(len,1);vector_e]); u_k=fft(vector_u); phi_k=e_k.*conj(u_k); (real(ifft(phi_k))).' (A*vector_e).'
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
频域计算
Φk Akek
E
k
FFT
e
0
k
Φk IFFT conjUk e Ek 的最前M个元素
分别采用: Ak ek 和快速傅立叶变换计算
mu=0.001;
end
w=zeros(len,1);
w_error=zeros(dotnumber,1);
e=zeros(dotnumber,1);
vector_u=zeros(2*len,1);
vector_d=zeros(len,1);
A=zeros(len,len);
中国科学院声学研究所 Institute of Acoustics, CAS
dk d kL, d kL 1,L , d kL L 1T
y k AT wˆ (k)
ek dk yk
wˆ k 1 wˆ k Φk
Φk Akek
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
中国科学院声学研究所 Institute of Acoustics, CAS
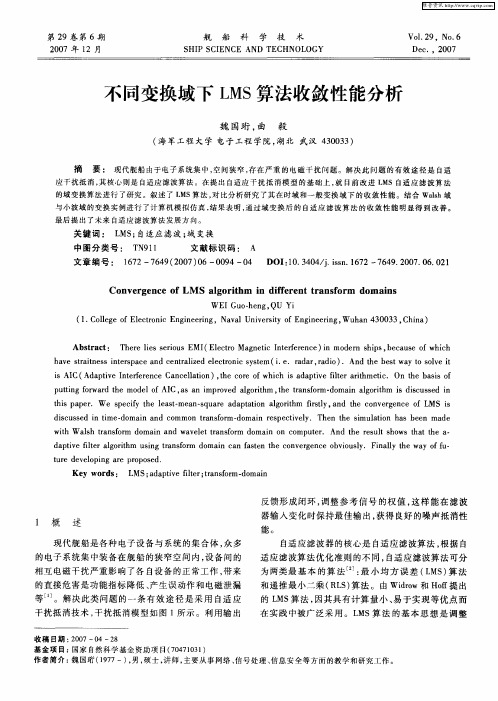
W用频域更新
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
wˆ k 1 wˆ k Φk
Wˆ
k
FFT
wˆ k
0
Wˆ
k
1
Wˆ
k
FFT
Φk
0
中国科学院声学研究所 Institute of Acoustics, CAS
0.1 0.12 -0.25].';
vector_d=[vector_d(2:end);d(
wo=h;
n)];
d=filter(h,1,u); d(dotnumber+1:end)=[];
if(mod(n,len)==len-1) 计算A,y,e,w
d=d+noise;
end
len=8;
w_error(n)=noLeabharlann m(w-wo)^2;问题:
LMS算法的计算量?
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
中国科学院声学研究所 Institute of Acoustics, CAS
块自适应算法
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
vector_u=2*rand(16,1)-1; w=[-0.1 0.2 0.7 0.4 -0.2 -0.1 0.12 -0.25].';
中国科学院声学研究所 Institute of Acoustics, CAS
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
vector_u=2*rand(16,1)-1; w=[-0.1 0.2 0.7 0.4 -0.2 -0.1 0.12 -0.25].';
中国科学院声学研究所 Institute of Acoustics, CAS
频域计算
中国科学院噪声与振动重点实验室 Key Lab. of Noise and Vib. Research, CAS
中国科学院声学研究所 Institute of Acoustics, CAS