平面运动点轨迹曲率半径和曲率中心的(1)
曲率半径的两种求解方法
曲率半径的两种求解方法作者:汪邦家孙丽来源:《中学物理·高中》2014年第07期高中物理教材中出现了曲率半径,并且在高考中也出现过求曲率半径的试题.那什么是曲线的曲率半径呢?曲率半径如何求解?很多学生都发出这样的疑问.本文将讨论曲率半径的概念及求曲率半径的两种求解方法.1平面曲线的曲率半径工程技术中用曲率来描述曲线的弯曲程度.如图1所示,设曲线C是光滑的(曲线上每一处都有切线,且切线随切点的移动而连续转动).在曲线C上选定一端点M0作为度量弧s的基点.设曲线上点M对应于弧s,在点M处切线的倾角为a,曲线上另外一点M′对应于弧s+Δs,在点M′处切线的倾角为a+Δa,那么,弧段MM′的长度为|Δs|,当动点从M移动到M′时切线转过的角度为|Δa|.用比值|Δa||Δs|来表达弧段MM′的平均弯曲程度,把这比值叫做弧段MM′的平均曲率,并记作=|ΔaΔs|,当Δs→0时,上述平均曲率的极限叫做曲线C在点M处的曲率,记作K,K=|dads|,把ρ=1K=|dsda|称为曲线C在点M的曲率半径.设曲线的直角坐标方程为y=f(x),则ρ=1K=(1+y′2)3/2|y″|.设曲线的参数方程为x=φ(t),,则ρ=1K=[]-1.1抛物线上的曲率半径例1(2011年安徽高考题)现将一物体与水平面成a角的方向以速度v0抛出,如图2所示.则在轨迹最高点P处的曲率半径是多少?方法1数学公式法解斜抛运动参数方程x=φ(t)=v0cosa•t,-12gt2,可得φ′(t)=v0cosa,φ″(t)=0(1)--g(2)把(1)、(2)两式代入ρ=1K=[]-得ρ=[v20cos2a+(v0sina-gt)2]3/2v0gcosa(3)运动到轨迹最高点历时t=v0sinag(4)把(4)代入(3),得ρ=v20cos2ag.方法2物理方法一般的曲线运动可以分为很多小段,每小段都可以看作圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替.而曲线上某点的曲率半径,就是在曲线上包含该点在内的一段弧,当这段弧极小时,可以把把它看作是某个圆的弧,则此圆的半径就是曲线在该点的曲率半径,如图3.这样在分析质点经过曲线上某点的运动时,就可以采用圆周运动的分析方法来处理了.如图3中,当质点运动到A点对应的曲率半径为ρ,速度为vA,向心加速度为an,由向心加速度公式可得an=v2Aρ.解物体在在其轨迹的最高点P处只有水平速度,其水平速度为v0cosa,最高点法向加速度an=g=v0cosa)2ρ,所以曲率半径ρ=v20cos2ag.例2将一小球以v0=10 m/s的初速度从楼顶水平抛出,小球下落t=3 s时位于轨迹曲线上的P点,求曲线在P位置的曲率半径和此时小球的法向加速度.方法1数学公式法平抛运动参数方程x=φ(t)=v0t,得φ′(t)=v0,φ″(t)=0(1)把(1)、(2)两式代入ρ=[]-得ρ=(v20+g2t2)3/2v0g(3)把v0=10 m/s,t=3 s代入(3)式,得ρ=80 m.此时小球瞬时速度v=v20+(gt)2=20 m/s,所以an=v2ρ=5 m/s2.方法2物理方法如图4所示,下落3 s时,竖直速度vy=gt=103 m/s.此时瞬时速度v=v20+(gt)2=20 m/s,设其方向与水平方向夹角为θ,则tanθ=vyv0=3,得θ=60°.把重力加速度g沿该点法向和切向分解,法向分加速度an=gcos60°=5 m/s2.由an=v2ρ得ρ=v2an=2025 m=80 m.1.2椭圆上的曲率半径例3质点沿轨道方程为x2a2+y2b2=1的椭圆从A点开始做逆时针运动,如图5所示.求A、B两点的曲率半径.方法1数学公式法解椭圆的参数方程为x=φ(θ)=acosθ,可得φ′(θ)=-asinθ,φ″(θ)=-acosθ(1)-bsinθ(2)把(1)、(2)两式代入ρ=[]-得ρ=[a2sin2θ+b2cos2θ]3/2ab(3)A点θ=0,代入(3)式得ρA=b2a(4)B点θ=90°,代入(3)式得ρB=a2b(5)方法2物理方法解如图6所示,半径为b的圆柱面被两平面相截,其中一个平面与圆柱面轴线垂直,第二个平面与第一个平面交角为θ,且满足cosθ=ba.两平面的交线与圆柱面相切,如图所示.由图5可知,第一个平面与圆柱面的交线是一个半径为b的圆,第二个平面与圆柱面的交线是一半长轴为b,半短轴为a的椭圆.如图6所示建立直角坐标系,坐标原点在圆心O处,y轴过两个平面交线与圆柱面的切点C.x轴与圆的交点A、y轴与圆的另一个交点B,沿z轴方向在第二个平面上的射影正好是椭圆上的A′、B′.设一质点在半径为b的圆周上做速率为v的匀速圆周运动,则此质点沿z轴方向在第二个平面上的运动将沿椭圆轨道运动.这个射影的运动就是此处选择的运动,在此运动下求椭圆轨道点A′、点B′的曲率半径易知,A点的速度v,法向加速度v2b.A点的射影A′的速度和法向加速度分别为vA′=vcosθ=abv,(aA′)n=(aA)n=v2b.由这两式得A′处的椭圆曲率半径ρA′=v2A′(aA′)n=a2b.同理,由点B的速度v和法向加速度v2b,得B点的射影B′点的速度和法向加速度vB′=v,(aB′)n=(aB)ncosθ=av2b2,由这两式得B′处的椭圆曲率半径ρB′=v2B′(aB′)n=b2a.2立体曲线的曲率半径螺旋线的曲率半径例5已知等距螺旋线在垂直z轴方向的截面圆半径为R,螺距为h,如图7所示.一质点沿此螺旋线做匀速率运动,在垂直z轴方向的投影转过一周所用的时间为T.求该质点在做等距螺旋线运动时螺旋轨迹的曲率半径.方法1数学公式法此题属于立体曲线的曲率半径求解问题,上面给出的平面曲线的曲率半径求解公式在此已经不适用.对于一个以参数化形式给出的空间曲线x=φ(t),,z=ψ(t).其曲率半径计算公式为ρ=(x′2+y′2+z′2)3/2(z″y′-y″z′)2+(x″z′-z″x′)2+(y″x′-x″y′)2.解设此质点沿z轴方向的速率为v∥,螺旋线运动方程为x=φ(θ)=Rcosθ,z=ψ(θ)=v∥θ2πT,得x′=φ′(θ)=-Rsinθ,x″=φ″(θ)=-Rcosθ(1)-Rsinθ(2)z′=ψ′(θ)=v∥t2π,z″=ψ″(θ)=0(3)把(1)、(2)、(3)式代入ρ=[x′2+y′2+z′2]3/2(z″y′-y″z′)2+(x″z′-z″x′)2+(y″x′-x″y′)2,得ρ=4π2R2+v2∥T24π2R(4)质点沿z轴方向做匀速直线运动,v∥T=h(5)把(5)式代入(4)式得ρ=4π2R2+h24π2R.方法2物理方法解质点在垂直轴方向做匀速圆周运动的分速度为v⊥=2πRT(1)沿z轴方向匀速直线运动速度为v∥=hT(2)设质点沿螺旋线运动速度v,则v2=v2⊥+v2∥(3)把(1)、(2)代入(3)得v2=4π2R2+h2T2(4)质点运动的加速度a=ΔvΔt=Δ(v⊥+v∥)Δt=Δv⊥Δt=0,这里Δv∥Δt=0,可知加速度与质点做半径为R的圆周运动的加速度相同,即a=an=(2πT)2R=4π2RT2(5)把(4)、(5)代入ρ=v2a得ρ=4π2R2+h24π2R.从数学和物理两种角度出发都可以求解曲率半径,充分体现了数学工具在处理物理问题中的重要地位,体现了数学和物理在处理同一问题时的和谐统一美.。
(完整版)机械原理笔记
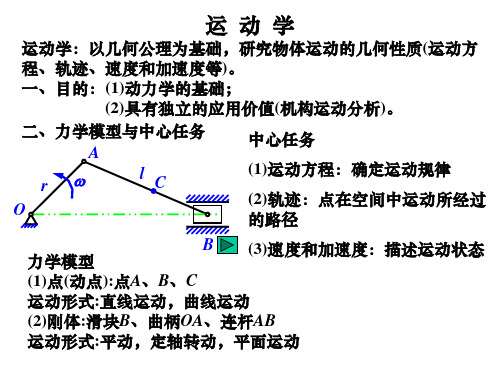
(完整版)机械原理笔记第⼀章平⾯机构的结构分析1.1 研究机构的⽬的⽬的:1、探讨机构运动的可能性及具有确定运动的条件2、对机构进⾏运动分析和动⼒分析3、正确绘制机构运动简图1.2 运动副、运动链和机构1、运动副:两构件直接接触形成的可动联接(参与接触⽽构成运动副的点、线、⾯称为运动副元素)低副:⾯接触的运动副(转动副、移动副),⾼副:点接触或线接触的运动副注:低副具有两个约束,⾼副具有⼀个约束2、⾃由度:构件具有的独⽴运动的数⽬(或确定构件位置的独⽴参变量的数⽬)3、运动链:两个以上的构件以运动副联接⽽成的系统。
其中闭链:每个构件⾄少包含两个运动副元素,因⽽够成封闭系统;开链:有的构件只包含⼀个运动副元素。
4、机构:若运动链中出现机架的构件。
机构包括原动件、从动件、机架。
1.3 平⾯机构运动简图1、机构运动简图:⽤简单的线条和规定的符号来代表构件和运动副并按⼀定的⽐例表⽰各运动副的相对位置。
机构⽰意图:不按精确⽐例绘制。
2、绘图步骤:判断运动副类型,确定位置;合理选择视图,定⽐例µl;绘图(机架、主动件、从动件)1.4 平⾯机构的⾃由度1、机构的⾃由度:机构中各活动构件相对于机架的所能有的独⽴运动的数⽬。
F=3n - 2p L - p H(n指机构中活动构件的数⽬,p L指机构中低副的数⽬,p H指机构中⾼副的数⽬)⾃由度、原动件数⽬与机构运动特性的关系:1):F≤0时,机构蜕化成刚性桁架,构件间不可能产⽣相对运动2):F > 0时,原动件数等于F时,机构具有确定的运动; 原动件数⼩于机构⾃由度时,机构运动不确定; 原动件数⼤于机构⾃由度,机构遭到破坏。
2、计算⾃由度时注意的情况1)复合铰链:m个构件汇成的复合铰链包含m-1个转动副(必须是转动副,不能多个构件汇交在⼀起就构成复合铰链,注意滑块和盘类构件齿轮容易漏掉,另外机架也是构件。
2) 局部⾃由度:指某些构件(如滚⼦)所产⽣的不影响整个机构运动的局部运动的⾃由度。
各种坐标法——精选推荐
各种坐标法::⽮径::...选取参考系上某确定点 O 为坐标原点,⾃点O 向动点M 作⽮量,称为点 M 相对原点 O 的位置⽮量,简称⽮径。
::运动⽅程::...当动点M 运动时,⽮径随时间⽽变化,并且是时间的单值连续函数,即=(t)。
上式称为以⽮量表⽰的点的运动⽅程。
::轨迹::...动点M 在运动过程中,其⽮径的末端描绘出⼀条连续曲线,称为⽮端曲线。
显然,⽮径的⽮端曲线就是动点M 的运动轨迹,如图所⽰。
::速度::...动点的速度⽮等于它的⽮径对时间的⼀阶导数,即:。
动点的速度⽮沿着⽮径的⽮端曲线的切线,即沿动点运动轨迹的切线,并与此点运动的⽅向⼀致。
::加速度::...点的速度⽮对时间的变化率称为加速度。
动点的加速度⽮等于该点的速度⽮对时间的⼀阶导数,或等于⽮径对时间的⼆阶导数,即:为⽅便起见,记为如在空间任意取⼀点O ,把动点M在连续不同瞬时的速度⽮,…等都平⾏地移到点O ,连接各⽮量的端点M ,,…,就构成了⽮量端点的连续曲线,称为速度⽮端曲线,如下图所⽰。
动点的加速度⽮的⽅向与速度⽮端曲线在相应点M 的切线相平⾏。
::运动⽅程::...取⼀固定的直⾓坐标系Oxyz ,如下图所⽰。
由于原点与直⾓坐标系的原点重合,因此有如下关系式中分别为沿三个定坐标轴的单位⽮量。
由于是时间的单值连续函数,因此x ,y ,z 也是时间的单值连续函数,即:这些⽅程称为以直⾓坐标表⽰的点的运动⽅程。
当点在某⼀平⾯运动时,运动⽅程为:::轨迹::...将运动⽅程中的时间 t 消去,可以得到点的轨迹⽅程。
对于平⾯问题有:f (x ,y ) =0::速度::...有结论:速度在各坐标轴上的投影等于动点的各对应坐标对时间的⼀阶导数。
::加速度::...结论:加速度在直⾓坐标轴上的投影等于动点各对应坐标对时间的⼆阶导数。
::例⼀::...已知:椭圆规的曲柄OC 可绕定轴O 转动,其端点C 与规尺AB 中点以铰链相连接,⽽规尺A ,B 两端分别在相互垂直的滑槽中运动,如图所⽰。
平面曲线运动
d 2
1
O
t+dt t
d t+dt 1 2 t
O
引入了角位置,角位移,角速度,角加速度, 它们与位矢,位移, 速度,加速度一一对应。 线量 角量
d dt,
0
a r r v
t
匀变速率圆周运动中:
(E)若物体的加速度 a 为恒矢量,它一定作匀变
v dv a an at n0 t0 R dt
2
课 堂 练 习 解:
以初速度 v0 20ms 从地面抛出一小球,抛出 方向与水平面成 60 的夹角,则小球落地处 的轨道曲率半径为 m(不计空气 2 阻力,取 g 10ms )
)
t 含义:反映一段时间内角速度变化快慢。
2 1
t
2 1 t+t
O
B)瞬时角加速度(
定义:
单位: rad / s 2
方向: 的极限方向
d lim t 0 t dt
)
§1-3 平面曲线运动
平面曲线运动: 质点的运动轨迹在同一个平面内的运动, 它可以分解成两个直线运动的叠加。
一. 匀变速直线运动
质点作匀变速直线运动, 其加速度
为恒矢量, a
dv adt
0 t
有
dv a C dt
积分可得
初始条件
v
v0
v v0 at
初始条件
x x0
dx 再由 v dt
平面一般运动刚体上点轨迹曲率半径和曲率中心的分布规律研究及应用
如图 1 示 , 所 静瞬心 线 为直线 , 瞬心线 为 以 R 为半 径 的圆. 心 P沿静 瞬心 线 的绝 对运 动 为变 速 直 动 瞬
线 运动 , 动瞬心 线 的相 对运 动为 变速 圆周运 动 , 沿 而动 刚体 的牵连 运动则 为动 瞬心 线绕静 瞬心 线所 做 的无 滑动纯 滚动 . 由理 论力学 知识 不难 看 出 , 刚体 的角速 度 为 动瞬 心线法 线转 角对 时间 t的导 数 , 动 即
400) 50 2
摘 要 : 用相 对运 动原 理说 明 了平 面运 动 刚体 上存 在 着一 个 拐 点 圆 , 出 了动 、 瞬心 线各 利 给 静 种 不 同接 触 情 况下拐 点 圆和 刚体 上 点轨迹 曲率半 径 与 曲 率 中心 的 确 定方 法 , 究 了点 轨 迹 曲 研 率 半径 和 曲率 中心 的分 布规律 , 讨论 了一 个鹤 式起 重机 构设 计 实例.
曲线称 为 静瞬 心线 , 固连 于 刚体 的动 坐标 系上绘 出的 曲线 称 为 动 瞬心 线. 外界 观 察 , 连 于刚 体 上 的 在 从 固 动 瞬心 线绕 着 固连 于机 架上 的静 瞬 心线 作无 滑动 的纯 滚 动. 如 , 例 周转 轮系 中行 星轮 的节 圆绕着 固定 太 阳 轮 节 圆作 纯滚 动. 线针 轮 机构 中摆 线轮 节 圆绕 固定 轮节 圆作 纯滚 动. 摆 双滑 块机 构 的动瞬 心线是 以连 杆为 直 径 的 圆 , 瞬心线 则是 直 径为其 两 倍 的 内切 圆. 静 反平 行 四边形 机 构连杆 的动瞬 心线 及静 瞬心线 分别 是两
关键 词 : 面运 动 刚体 ;动 点轨 迹 ;瞬 心线 ; 点 圆 ;曲率半径 ;曲率 中心 ; 式起 重机 平 拐 鹤 中图法 分类 号 : TH1 2 1 文献标 识码 :A
第五章 第一节 三种方法表示点的运动的比较
x
第一节 三种方法表示点的运动的比较
a r
O z a r O y M z x v y M v 直角坐标法 自然法 x=f1(t) 运 y=f2(t) 动 s = f(t) r = r(t) z=f3(t) 方 r=xi+yj+zk 程 g1(x,y)=0 轨 已知 矢端曲线 g2(x,z)=0 迹 vx = x vy= y 速 v=dr/dt r v =s vz = z = 度 沿轨迹切线 v = vt v= vxi+vy j+vzk a=at+an ax= v x 加 ay= v x =att+ann r 速 a= v = az= v z at= v an=v2/r 度 a=axi+ay j+azk an指向曲率中心 矢量法
第五章 点的运动学
本章将研究点的运动 包括点的运动方程、运动轨迹、速度、加速度等。 三种方法: (1)矢量法(主要用于理论分析) (2)直角坐标法(主要用于实际应用) (3) 自然法(主要用于实际应用) 还有柱坐标法和球坐标法(略)
第一节 三种方法表示点的运动的比较
a r
O z a r O y M z x v y M v 直角坐标法 x=f1(t) 运 y=f2(t) 动 z=f3(t) 方 r = r(t) r=xi+yj+zk 程 g1(x,y)=0 轨 矢端曲线 g2(x,z)=0 迹 vx = x vy= y 速 v=dr/dt r vz = z = 度 沿轨迹切线 v= vxi+vy j+vzk ax= v x 加 ay= v x r 速 a= v = az= v z 度 a=axi+ay j+azk 矢量法 自然法
高等数学上3.7平面曲线的曲率PPT
Q 70(千克力) 571.4(千克力),
641.5(千克力).
即:飞行员对座椅的压力为641.5千克力.
首页
上页
返回 第11页,共26页。
下页
结束
小结
运用微分学的理论,研究曲线和曲面的性质的数学分支—
—微分几何学.
1. 弧长微分 ds 1 y2 dx 或 ds (dx)2 (dy)2
3
要使 k最大, 必有 (4 5cos2 t )2 最小,
t , 3 此时 k最大,
22
首页
上页
返回 第13页,共26页。
下页
结束
补充:参数方程曲率公式
设
x y
(t ), (t ),
二阶可导,
dy dx
(t ) (t )
,
d2y dx 2
(t)
(t) (t) 3(t)
(t) .
高等数学上3.7平面曲线的曲率
首页
上页
返回 第1页,共26页。
下页
结束
一、 弧微分
设
在(a , b)内有连续导数, 其图形为 AB,
弧长 s AM s(x)
s M M M M x M M x
M M (x)2 (y)2
MM
x
y
y
f (x) M
B
A M y
x
oa x
bx
x x
M M 1 (y)2
的凹向一侧法线上取点 D 使
CR
T
M (x, y)
DM R 1
o
x
K
把以 D 为中心, R 为半径的圆叫做曲线在点 M 处的
曲率圆 ( 密切圆 ) , R 叫做曲率半径, D 叫做 曲率中心.
高中物理竞赛_话题4:曲率半径问题

话题4:曲率半径问题一、曲率半径的引入在研究曲线运动的速度时,我们作一级近似,把曲线运动用一系列元直线运动来逼近。
因为在0t ∆→ 的极限情况下,元位移的大小和元弧的长度是一致的,故“以直代曲”,对于描述速度这个反映运动快慢和方向的量来说已经足够了。
对于曲线运动中的加速度问题,若用同样的近似,把曲线运动用一系列元直线运动来代替,就不合适了。
因为直线运动不能反映速度方向变化的因素。
亦即,它不能全面反映加速度的所有特征。
如何解决呢?圆周运动可以反映运动方向的变化,因此我们可以把一般的曲线运动,看成是一系列不同半径的圆周运动,即可以把整条曲线,用一系列不同半径的小圆弧来代替。
也就是说,我们在处理曲线运动的加速度时,必须“以圆代曲”,而不是“以直代曲”。
可以通过曲线上一点A 与无限接近的另外两个相邻点作一圆,在极限情况下,这个圆就是A 点的曲率圆。
二、曲线上某点曲率半径的定义在向心加速度公式2n v a ρ=中ρ为曲线上该点的曲率半径。
圆上某点的曲率半径与圆半径相等,在中学物理中研究圆周运动问题时利用了这一特性顺利地解决了动力学问题。
我们应该注意到,这也造成了对ρ意义的模糊,从而给其它运动的研究,如椭圆运动、抛体运动、旋轮线运动中的动力学问题设置了障碍。
曲率半径是微积分概念,中学数学和中学物理都没有介绍。
曲率k 是用来描述曲线弯曲程度的概念。
曲率越大,圆弯曲得越厉害,曲率半径ρ越小,且1kρ=。
这就是说,曲线上一点处的曲率半径与曲线在该点处的曲率互为倒数。
二、曲线上某点曲率半径的确定方法1、 从向心加速度n a 的定义式2n v a ρ=出发。
将加速度沿着切向和法向进行分解,找到切向速度v 和法向加速度n a ,再利用2n v a ρ=求出该点的曲率半径ρ。
例1、将1kg 的小球从A 点以10/m s 的初速度水平抛出,设重力加速度210/g m s =,求:(1)在抛出点的曲率半径; (2)抛出后1s 时的曲率半径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面运动点轨迹曲率半径和曲率中心的解析计算式王允地1 王良文2(1.陕西科技大学机械学院,陕西咸阳;2.郑州轻工业学院机电学院,河南郑州450002)摘要本文对平面运动点的位移、速度和加速度进行了复矢量描述,并引入复矢量点积概念。
在此基础上,根据平面运动点的法向加速度等于速度的平方与曲率半径的比值的思想,给出了计算点轨迹曲率半径和曲率中心的通式、直角坐标式和极坐标式,还讨论了几个有代表性的分析实例。
关键词:平面运动点,轨迹曲率半径,曲率中心,解析计算式。
Analytic calculation formula for planar motion point trace’s radius of curvature and center point of curvatureWang Yundi (1)Wang Liangwen (2)(1.School of Mech·Eng·,Shanxi University of Science and Technology, ShanXi ,Xianyang, 712081, China; 2. Electric-Mech·Dep·of Zhengzhou Llight Industry Institute, Zhengzhou , 450002, China)Abstract: The paper describes the displacement 、velocity 、acceleration of Planar motion point by vector, and presents vector dot matrix conception 。
under this base, according to the theory that vertical acceleration of planar motion point equals the ratio between square of velocity and radius of curvature , the general calculation formula 、the formula in form of right angle coordinates and the formula in form of polar angle coordinates for calculating motion point trace’s radius of curvature and center point of curvature are submitted . Some typical examples are discussed.Key words: Planar motion point; trace’s radius of curvature; center point of curvature; analytic calculation formula.0引言在机构的运动分析与综合中,对运动点轨迹曲率的研究十分必要。
如在凸轮机构综合中,凸轮廓线曲率的变化与从动件的加速度特性有重要的关联。
曲率半径变化不合适,可能导致凸轮机构无法正常工作或者凸轮不能被正确加工。
有关对平面运动点轨迹曲率半径和曲率中心的研究和阐述散见于各相关文献[1-9]。
本文对这类问题进行了系统的研究。
在用复矢量描述平面运动点的位移、速度和加速度的基础上,根据动点的法向加速度等于速度的平方与曲率半径比值的理论,利用矢量点积的概念,导出了平面运动点在运动中轨迹的曲率半径和曲率中心的计算通式,以及其运动点的轨迹采用参数型变量及函数型变量表达方式时,轨迹的曲率半径和曲率中心计算的直角坐标和极坐标的表达式。
通过讨论有代表性的分析实例,证明了理论的正确性。
1 点平面运动的复矢量描述1.1位移图1 动点轨迹及曲率中心如图1,动点C 在坐标系xoy 中运动,轨迹曲率中心为O c ,曲率半径为ρ,取x 轴为实轴,y 轴为虚轴。
C 点的直角坐标为(x,y ),O c 的直角坐标为(x*,y*)。
矢径oc 的模为r ,幅角为ϕ;矢径c oo 的模为r*,幅角为ϕ*。
以ioc 的复矢量表示式成为i oc r re ϕ== (1)与直角坐标的关系为oc x jy =+而cos sin x r y r ϕϕ=⎧⎨=⎩ (2) 1.2速度如果已知oc 的模r 和幅角ϕ随时间t 的变化关系()()r r t t ϕϕ=⎧⎨=⎩ (3) 那么C 点速度v 成为i i docv re r ie ϕϕϕ==+ (4) 速度的直角坐标便是y j xv+= x (实轴)cos sin sin cos x r r y r r ϕϕϕϕϕϕ=-=+ (5)1.3加速度将(4)式对时间求导,得C 点加速度的复矢量表示式为()()22i i dva r r e r r ie dtϕϕϕϕϕ==-++ (6) 加速度的直角坐标成为22()cos (2)sin ()sin (2)cos a x jyx r r r r y r r r r ϕϕϕϕϕϕϕϕϕϕ=+=--+=-++ (7) 2 动点轨迹曲率半径及曲率中心的计算式 2.1通式由理论力学[1]的论述可知,动点C 的法向加速度等于速度的平方与曲率半径的比值。
我们仍定义两复矢量的点积为两者的模及其夹角余弦的乘积。
这样,在动点速度v 及加速a 已知的情况下,曲率半径ρ可按公式32()()v v iv aρ⋅=⋅ (8) 求出。
该式的计算结果为一代数值。
当曲率中心O C 位于动点C 前进方向左侧时,ρ的计算结果为正值;反之,当曲率中心0C 位于动点C 前进方向的右侧时,ρ的计算结果为负值,它的绝对值才是曲率半径的长度。
在按(8)式算出ρ值后,曲率中心O C 的位置便可由公式 *c ivoo r r vρ==+ (9) 算出。
将(8)式代入(9)式,得知由C 点位置矢量r 、速度v 及加速度a 所决定的,曲率中心O c 的位置矢量*r 为()()*()iv v v r r iv a⋅=+⋅ (10)(8)式和(10)式便是由动点C 的运动参数计算曲率半径ρ和曲率中心位置*r 的通式。
不难知道,将确定动点C 位置的自变量改换为其它参数,(8)式和(10)式仍然成立。
2.2直角坐标式 2.2.1参数型在已知C 点的直角坐标(x,y )及其对时间t 的一阶导数(,x y )和对时间的二阶导数(,x y )的情况下,由(8)式推得曲率半径的代数值ρ的计算公式为3222()x y xy yxρ+=- (11)由(10)式推得曲率中O C 的直角坐标(x*,y*)为2222()*()*y x y x x xy yx x x y y y xy yx ⎧+=-⎪-⎪⎨+⎪=+⎪-⎩(12) 2.2.2函数型如果已知动点C 的直角坐标y 与x 之间的函数关系()y y x = (13) 不失一般性,设x 等于参数t ,即()y y t x t=⎧⎨=⎩ (14) 便可由(11)及(12)式推得根据(13)式及dyy dx'=(15) 和22d yy dx''= (16)所决定的曲率半径的代数值ρ及曲率中心O c 位置坐标(x*,y*)的计算式为322(1)y y ρ'+=''(17)及⎪⎪⎩⎪⎪⎨⎧'''++='''+'-=y y y y y y y x x 221*)1(* (18) 2.3极坐标式 2.3.1函数型已知动点C 矢径的模r 与幅角ϕ之间的函数关系,即O r R S =+ (19)其中R O 为常量,而()S S ϕ= (20)令dS dr S d d ϕϕ'== (21) 2222d S d r S d d ϕϕ''== (22) 利用通式类似地可以推知,动点轨迹曲率半径代数值ρ的计算式为()()3222222()o O O R S S R S S R S S ρ⎡⎤'++⎣⎦='''++-+ (23) 曲率中心O C 的位置矢量*r 则为()()()()2222*()2O i i O O O O R S S r R S e R S S i e R S S R S S ϕϕ'++'⎡⎤=++-+⎣⎦'''++-+ (24)2.3.2参数型已知动点C 矢径的模r 及幅角ϕ随时间t 的变化关系()O r R S t =+ (25)及()t ϕϕ= (26)利用通式同样地可以推知,动点轨迹曲率半径的代数值ρ的计算式为()()()32222232O O O S R S S S S R S R S ϕρϕϕϕϕ⎡⎤⎛⎫⎢⎥++ ⎪⎢⎥⎝⎭⎣⎦=⎛⎫-++-+ ⎪⎝⎭(27) 曲率中心O C 的位置矢量*r3 分析实例3.1函数型圆图2 函数型圆参看图2,将22223x y R x y y R y y ⎧⎪+=⎪⎪⎪'=-⎨⎪⎪''=-⎪⎪⎩(28) 代入(17)及(18)式,得R Rρρ=-⎧⎨=⎩ ()()y o y o (29)及**x oy o =⎧⎨=⎩(30) 3.2参数型圆图3 参数型圆参看图3,将2Re o i i t O i ti t r R e v R iea R e ϕωωωωω⎧=+⎪=⎨⎪=-⎩(31) 代入(8)式及(10)式,得*o i o Rr R e ϕρ=⎧⎨=⎩(32)3.3椭圆x参看图4,将22cos sin sin cos cos sin x a t y b t x a ty b t x a t y b tωωωωωωωωωω=⎧⎪=⎪⎪=-⎨=⎪⎪=-⎪=-⎩ (33) 代入(11)式及(12图4 椭圆⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⎪⎪⎭⎫⎝⎛+-=⎪⎪⎭⎫ ⎝⎛+-=+=t b t b t b y t a t b t a x ab t b t ωωωαωωωαωωαρsin )cossin (*cos )cos sin (*)cos sin (22222222232222 (34) 3.4渐开线参看图5,将Re Re it it itit it r Rtie v Rtea Rtie ⎧=-⎪=⎨⎪=+⎩(35) 图5 渐开线x代入(8)式及(10)式,得*Re itRtr ρ=⎧⎨=⎩ (36)3.5等进螺线图6 等进螺线参看图6,将H S H S S O ϕ⎧=⎪Φ⎪⎪'=⎨Φ⎪''=⎪⎪⎩(37) 代入(23)式,得32222212O O R H H R H ϕρϕ⎡⎤⎛⎫++⎢⎥ ⎪ΦΦ⎝⎭⎢⎥⎣⎦=⎛⎫++ ⎪ΦΦ⎝⎭(38)3.6简谐凸轮参看图7,将221cos 2sin 2cos 2H S H S H S πϕπϕππϕπ⎧⎛⎫- ⎪⎪Φ⎝⎭⎪=⎪⎪⎪⎪Φ'=⎨Φ⎪⎪⎪Φ''=⎪Φ⎪⎪⎩(39) 代入(23)式,得X图7 简谐凸轮322222221cos sin 221cos sin 1cos cos 22O O OR H H R R H πϕπϕπρπϕπϕπϕπϕππ⎡⎤⎛⎫⎛⎫-⎢⎥ ⎪ ⎪ΦΦ⎢⎥++ ⎪ ⎪Φ⎢⎥⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦=⎛⎫⎛⎫⎛⎫-- ⎪ ⎪ ⎪ΦΦΦΦ+ ⎪Φ ⎪⎝⎭ (40)3.7 摆线凸轮图8 摆线凸轮参看图8,将212sin 221cos 22sin S H H S H S ϕπϕππϕππϕ⎧⎛⎫=- ⎪⎪ΦΦ⎝⎭⎪⎪⎛⎫'=-⎨ ⎪ΦΦ⎝⎭⎪⎪''=⎪ΦΦ⎩(41) 代入(23)式,得3222222221212sin 1cos 212222122sin 1cos sin sin 22O O O R H H R R H H ϕπϕπϕπρϕπϕπϕπϕπϕπϕππ⎡⎤⎛⎫⎛⎫+-+-⎢⎥ ⎪ ⎪ΦΦΦΦ⎝⎭⎝⎭⎢⎥⎣⎦=⎛⎫⎛⎫⎛⎫+-+--+- ⎪ ⎪ ⎪ΦΦΦΦΦΦΦΦ⎝⎭⎝⎭⎝⎭(42)3.8摆线针轮理论廓线参看图9,令转角ϕ等于时间t ,记 OP=R 1 ,O'P=R 2 ,O'C= l图9 摆线针轮理论廓线则有 ()()12121212111212211212()11R I R i R i R i R i R i r oc R R e leR d r v R R ie l ie d R R dv a R R e l e d R ϕϕϕϕϕϕϕϕ⎛⎫- ⎪⎝⎭⎛⎫- ⎪⎝⎭⎛⎫- ⎪⎝⎭⎧⎪==--⎪⎪⎛⎫⎪==---⎨ ⎪⎝⎭⎪⎪⎛⎫⎪==--+- ⎪⎪⎝⎭⎩1215R Z R R ⎛⎫== ⎪-⎝⎭(43) 将其代入(8)式,得 ()()()()32222111212122232211112121222221cos 112cos 1R R R R R l R R l R R R R R R R R R l R R l R R R R ϕρϕ⎡⎤⎛⎫⎛⎫⎢⎥----+- ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦=⎛⎫⎛⎫⎛⎫-----+- ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭ (44) 3.9双滑块机构连杆总轨迹参看图10,记OO'=O'A=O'B=R ,O' C=l ,<A O'C =α。