8汽车系统动力学-路面输入及其模型
车辆系统动力学2013版(合肥工业大学卢剑伟) - 第一篇垂向动力学.

第9章 行驶动力学模型
➢ 模型推导前提 ➢ ¼车辆模型 ➢ ½车辆模型 ➢ 整车模型
模型推导前提
模型推导前提
模型推导前提
第9章 行驶动力学模型
➢ 模型推导前提 ➢ 1/4车辆模型 ➢ 1/2车辆模型 ➢ 整车模型
1/4车辆模型
1/4车辆模型
1/4车辆模型
1/4车辆模型
第9章 行驶动力学模型
连续可变阻尼的半主动悬架系统
第10章 可控悬架
➢ 车身高度调节系统 ➢ 全主动悬架系统 ➢ 连续可变阻尼的半主动悬架系统 ➢ 各类悬架系统的性能比较
各类悬架的性能比较
➢ 模型推导前提 ➢ 1/4车辆模型 ➢ 1/2车辆模型 ➢ 整车模型
1/2车辆模型
1/2车辆模型
1/2车辆模型
第9章 行驶动力学模型
➢ 模型推导前提 ➢ 1/4车辆模型 ➢ 1/2车辆模型 ➢ 整车模型
整车模型
整车模型
整车模型
整车模型
第一篇 垂向动力学
第5章 机械振动基础 第6章 路面输入及其模型 第7章 汽车部件垂向动力学 第8章 人体对振动的反应 第9章 行驶动力学模型 第10章 可控悬架系统
第6章 路面输入及其模型
➢ 路面测量技术及数据处理 ➢ 路面不平度的功率谱密度 ➢ 空间频率功率谱密度转化为时间频率功率谱密度 ➢ 路面不平度对汽车的输入功率谱密度
空间/时间频率功率谱密度变换
空间/时间频率功率谱密度变换
空间/时间频率功率谱密度变换
空间/时间频率功率谱密度变换
第6章 路面输入及其模型
路面测量技术及数据处理
路面测量技术及数据处理
第6章 路面输入及其模型
➢ 路面测量技术及数据处理 ➢ 路面不平度的功率谱密度 ➢ 空间频率功率谱密度转化为时间频率功率谱密度 ➢ 路面不平度对汽车的输入功率谱密度
三角级数法构建路面下的半车模型时频分析

2020/12车辆工程与技术丨Vehicle engineering and technology140车时代AUTO TIME 目前,对不平路面时域激励模型的建模方法主要有滤波白噪声法、三角级数法、逆傅里叶变换法等[1]。
三角级数法的基本原理是路面激励利用若干正、余弦波进行叠加而成,由于三角波的相位随机性,故可建立任意功率谱密度的路面模型。
三角级数法是一种高保真的频域模型转换方法,能够生成满足国家标准的随机路面激励[2]。
因此,本文采用三角级数法来构建随机路面不平度模型。
1三角级数路面激励模型建立1.1 路面的功率谱密度路面功率谱密度表示路面不平度能量在空间频域的分布[3],按照国标GB7031-86《车辆振动输入―路面平度表示方法》[4],路面不平度位移功率谱密度拟合表达式采用下式:()()00wq q n G n G n n −=(1)式(1)中:0n 为参考频率,100.1m n −=;()0q G n 为路面不平度系数,3m ;w 为频率指数,一般为2。
1.2 三角级数法基本原理设路面高程为平稳、遍历的均值为零的高斯过程[5]。
随机信号可以通过离散傅里叶变换分解为一系列不同频率的正弦波,谱密度等于由带宽划分的这些正弦波幅值的平方。
在空间频率谱密度为()q G n ,利用平稳随机过程的平均功率的频谱展开性质,路面不平度的方差2z σ为:()212n z q n G n dnσ=∫ (2)将区间(1n ,2n )划为n 个区间,取每个小区间的中心频率()1,2,mid i n i n −=…,处的谱密度值()q mid i G n −代替()q G n 在整个小区间内的值,则离散化后近似为:()21nz q mid i i i G n n σ−=≈⋅∆∑ (3)小区间内要找到具有频率mid i n −且标准差为:()q mid i i G n n −⋅∆,则正弦波函数为:()()2sin 2q mid i i mid i i G n n n t πθ−−⋅∆⋅+将对应于各个小区间的正弦波函数叠加起来,可得路面随机输入:()()()12sin 2nq mid i i mid i i i q t G n n n t πθ−−==⋅∆⋅+∑(4)1.3 路面建模设空间频率范围为-1-10.011m 2.83m n <<[6],车速为20m/s,利用三角级数构建C 级路面。
carsim的动力学模型基础方程

汽车动力学模型基础方程在汽车工程中,动力学模型是一个重要的概念,它描述了汽车在运动过程中的力学特性和行为。
其中,汽车动力学模型的基础方程起着至关重要的作用,它们是描述汽车动力学特性的数学表达式,是汽车工程中的核心理论基础。
一、运动方程汽车在运动中受到多种力的作用,这些力包括牵引力、阻力、重力等。
通过牛顿第二定律,可以得到描述汽车运动的基本方程:F = ma其中,F是受到的合外力,m是汽车的质量,a是汽车的加速度。
根据牵引力、阻力和重力的关系,可以得到更加细致的运动方程:F_traction - F_drag - F_roll - F_grade = ma其中,F_traction是牵引力,F_drag是阻力,F_roll是滚动阻力,F_grade是上坡或下坡时产生的力。
这些力可以通过具体的公式计算得到,从而得到汽车的加速度。
二、转向方程在汽车运动中,转向是一个重要的问题。
汽车的转向能力与转向系的设计和轮胎的特性有关。
描述汽车转向行为的基础方程可以通过转向角速度、侧向力和横摆刚度等参数建立,具体方程如下:Mz = Iz * ωz + Fy * a其中,Mz是横摆力矩,Iz是车辆绕垂直轴的惯性矩,ωz是车辆的横摆角速度,Fy是轮胎的侧向力,a是车辆的横向加速度。
这个方程描述了汽车在转向过程中受到的各种力的平衡关系。
三、刹车方程刹车是汽车行驶中不可或缺的部分,汽车刹车性能与刹车系统、轮胎和路面特性等有关。
汽车刹车性能的基础方程可以描述如下:Fbrake = μ * Fz其中,Fbrake是刹车力,μ是刹车系数,Fz是轮胎受力。
刹车系数与刹车系统和轮胎的摩擦特性有关,它是刹车性能的一个重要参数。
总结通过以上的分析可以看出,汽车动力学模型的基础方程是汽车工程中的核心内容,它涉及到多个力学和运动学的概念,并且需要深入的数学和物理知识。
汽车动力学模型的基础方程不仅对汽车设计和优化具有重要意义,对于理解汽车行驶过程中的各种力学特性也有着重要意义。
基于路面激励的汽车系统动力学研究
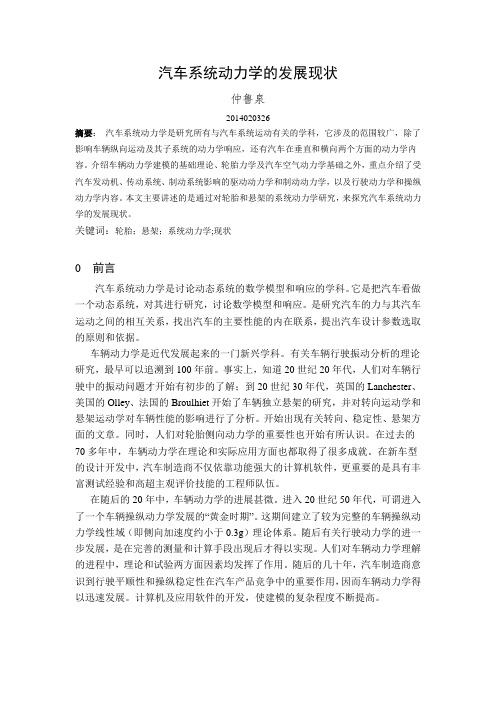
图中院m1 为悬挂质量 渊簧下质量冤曰m2 为非悬挂 质量 渊非簧载质量冤曰k 为弹簧刚度曰c 为系统的阻尼 系数曰kt 为轮胎刚度曰z1 为车轮轴的垂向位移曰z2 为 车身的垂向位移坐标曰坐标原点在各自的平衡位置曰 q 为路面不平度位移系数[5]遥
结合物理模型分析袁 可以推导出在 1/4 汽车行 驶动力学模型中渊包括两个自由度冤悬架双质量系统
平缓[14]遥 而速度z觶 2 的信号波形振幅在 80mm/s 左右袁 如图 4渊d)所示袁并且速度衰减也更柔和袁但在衰减 2 次后袁7.5s 时趋于平坦袁原因是振动能量被悬架阻尼 元件快速吸收[15]遥 2.1 路面正弦激励下的仿真分析
* 基金项目院列车垂向碰撞振动系统的动力学研究渊3544113217035冤遥
第 18 期
董世昌等院基于路面激励的汽车系统动力学研究 *
39
垂向运动微分方程为院
m2z咬 2+c渊z觶 2-z觶 1冤+k渊z2-z1冤=0
渊1冤
m1z咬 1+c渊z觶 1-z觶 2冤+k渊z1-z2冤+kt渊z1-q冤=0
路面激励主要分为两种院 一种是冲击振动袁另 一种是柔性振动遥 冲击主要是路面不平引起袁而且袁 冲击产生的作用强度大袁激励的时间较短袁这个时 候一般用阶跃函数来代替路面的凸起部分曰柔性振 动主要是路面上的小坑对汽车产生的受力袁它的作 用强度小袁激励时间较长袁这个时候一般用正弦波 激励方式来代替实际路面状况[3]遥 其实袁想非常准确 地建立起符合路面实际状况的模型是相当困难的遥 一般情况下做的仿真路面模型是可以充分满足仿 真目的袁而且是经过优化了的路面模型遥 建立了这 种模型之后袁再结合实际情况袁给模型赋值袁然后通 过 Simulink 示波器输出波形图袁最后结合输出信号 再做进一步垂向动力学分析遥
汽车系统动力学第1章 车辆动力学概述
第一节 历史回顾
20世纪90年代末期 – 研究人员发现,车辆在高速行驶过程中的横向稳定
裕度较小,通过调节四个车轮的纵向力而形成一定 的回转力矩,就可控制汽车的横摆角速度,由此提 出了“直接横摆控制”(Direct Yaw moment Control,简称DYC)算法,并经试验验证了该算法 的有效性。在此基础上,近年来又提出了限制一定 侧偏角范围的车辆动力学控制(Vehicle Dynamics Control,简称VDC)。 自2000年以来 – VDC系统得到了各国汽车厂商关注,并进行开发研 制。
第一章 车辆动力学概述
世纪商务英语听说教程 专业篇I (第五版)
主讲:朱明
高级工程师、高级技师、国家经济师 高级国家职业技能鉴定考评员 高级技能专业教师
汽车系统动力学
第一章 车辆动力学概述
• 第一节 历史回顾 • 第二节 研究内容和范围 • 第三节 汽车特性和设计方法 • 第四节 术语、标准和法规 • 第五节 发展趋势
汽车系统动力学
图1-1 底盘控制系统与车辆动力学关系示意图
汽车系统动力学
第一节 历史回顾
20世纪70年代末
– 从飞机设计技术中引入的防抱死制动系统 (Anti-lock Braking System,简称ABS) 可以称得上是向车辆底盘控制迈出的第一步, ABS通过限制制动压力来保证车轮的最佳滑移 率,从而避免了车轮抱死。
量、转向信号传感装置、变车道、J转向
等试验方法的测试技术日趋完善。 人们对非线性操纵响应的理解也愈加深
入,从而使操纵动力学的研究逐渐向高侧向 加速度的非线性作用域扩展。
汽车系统动力学
第一节 历史回顾
最近10年: 计算机技术及应用软件的开发,使建模的
车辆系统动力学

2. 系统具有整体性
系统虽是由多种元素组成,但系统的性能不 是各元素性能的简单组合,而是相互影响的,所 以这种组合使系统的整体功能获得新的内容,具 有更高的价值。例如一辆汽车是由发动机、传动 系、车轮、车身、操纵系统组成。单有发动机只 能发出动力,不会自己行走,但当发动机装在具 有车轮的汽车底盘上,就成为可以行走的汽车, 成为一种交通工具,其功能就与一台发动机大不 相同。由此可见,研究系统特性应从整体的观点 来看。系统的性能是由其整体性能为代表,而不 是由某一个元素所能代替的。
4. 系统具有功能共性
系统中存在着物质、能量和信息的流动, 并与外界(环境)进行物质、能量和信息的交 流,既可以从外界环境向系统输入或从系统向 外界环境输出物质、能量和信息。这是任何系 统都具有的功能,称为系统的功能共性。如汽 车系统中把燃料的燃烧热能转换为汽车的行驶 动能,在这一过程中,发动机吸收氧气,而排 除废气。这一过程有能量的交流,也有物质的 交流。
第一章 绪论
• 1.1 系统与系统动力学的概念 • 1.2 汽车系统动力学的研究内容和特点 • 1.3 汽车系统动力学的研究方法
1.1 系统与系统动力学的概念
在我们真实的大千世界中,存在着许多由一组物 件构成,以一定规律相互联系起来的实体,这就是系 统,自然界就有太阳系、银河系这样的大系统,这种 系统是脱离人的影响而自然存在,称为自然系统,还 有如生物、原子内部也构成了自然系统,还有一种系 统是通过人的设计而形成的系统,称为人工系统,如 生产系统、交通运输系统、通信系统;人工组合和自 然合成的组合系统,如导航系统。 本文主要是研究人工的物理系统及其特性。 如果把汽车的构成看成是一大系统,那么这一系 统应表示为(如图1-1):
一个系统可能由若干个环节组成,画出各环节的 方框图,然后将这些方框图联系起来,就构成了系 统的方框图。因此,方框图是数学模型-传递函数 的图解化 。
车辆控制数学模型
车辆控制数学模型
车辆控制的数学模型是用于描述车辆在运动过程中受到的各种力和力矩以及其响应的数学方程。
这些模型通常涉及多个方面,包括车辆的动力学(运动学和动力学)、悬挂系统、轮胎特性等。
以下是一些常见的车辆控制数学模型的要素:
运动学模型:
位置和姿态:描述车辆在空间中的位置和朝向。
速度和角速度:描述车辆在不同方向上的线速度和角速度。
动力学模型:
质量和惯性:车辆的质心质量和绕各轴的惯性矩。
动力:引擎或电动机提供的动力。
阻力:空气阻力、滚动阻力等对车辆运动的阻碍。
摩擦:轮胎与路面之间的摩擦力。
悬挂系统模型:
弹簧和阻尼:描述车辆悬挂系统的弹簧刚度和阻尼特性。
悬挂几何:车轮与车身之间的几何关系,对车辆姿态的影响。
轮胎模型:
轮胎力:描述轮胎受力与滑移关系,通常使用Pacejka Magic Formula 或其他轮胎模型。
侧向和纵向力:描述轮胎在横向和纵向上产生的力。
车辆控制输入:
转向输入:车辆转向角度或转向速度。
加速度输入:车辆纵向的加速度控制。
这些要素可以通过运动学和动力学方程来描述车辆的运动行为。
数学模型的建立和求解可以使用传统的动力学方法、控制理论、优化方法等。
在实际应用中,这些模型可以用于开发车辆动态控制系统,包括制动系统、转向系统、巡航控制系统等,以提高车辆的性能、稳定性和安全性。
不同类型的车辆(小轿车、卡车、无人车辆等)可能会采用不同的数学模型来更好地适应其特定的运动特性。
车辆系统动力学解析
汽车系统动力学的发展现状仲鲁泉2014020326摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。
介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。
本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。
关键词:轮胎;悬架;系统动力学;现状0 前言汽车系统动力学是讨论动态系统的数学模型和响应的学科。
它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。
是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。
车辆动力学是近代发展起来的一门新兴学科。
有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。
事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。
开始出现有关转向、稳定性、悬架方面的文章。
同时,人们对轮胎侧向动力学的重要性也开始有所认识。
在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。
在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。
在随后的20年中,车辆动力学的进展甚微。
进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。
这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。
随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。
人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。