长航时太阳能无人机的设计
高空太阳能无人机总体设计要点分析
高空太阳能无人机总体设计要点分析摘要:高空长航时(HALE)太阳能无人机(UAV)在其工作机理上与传统动力飞机有明显不同,其主要特点在于其总体设计方式,而在方案的设计和选择上,必须仔细考虑对应的技术要点。
本文介绍了高空太阳能无人机的总体结构和重量均衡原理,并从飞行动力要求、布局形式选择、飞行剖面、空间使用环境等几个角度对其进行了分析,得出了一些重要的结果,对实现高空太阳能无人机的整体设计及方案进行了深入的探讨。
关键词:高空;无人机;太阳能;长航时引言太阳能是一种取之不尽用之不竭的绿色能源,对环境没有任何危害。
近几年,太阳电池技术发展迅速,已经逐渐发展成一种新型的、能够支持人类社会可持续发展的新型能源。
临近空间是比常规飞机的飞行高度更高、比轨道飞机的飞行距离更低的空间区域,通常把距离地球20-100公里的空域看作是临近空间。
临近空间包含大气平流层的大部分区域(12~50公里),中间大气层(50至80公里)和部分电离层区域(60至100公里)。
在近地表,由于太阳光的辐射强度和气候因素的关系密切,在20公里以上的临近空间中,辐射强度与外层空间相近,所以,在临近空间飞行的太阳能无人机 UAV可以充分利用太阳能,连续飞行几个月甚至几年,是进行情报收集、侦查、监控、通讯等方面的最佳空中平台。
1太阳能无人机设计中的基本原则1.1恒定质量原理在飞行状态下,高空长航时太阳能无人机在空中的质量是恒定的,在正常的巡航状态下,其升力等于重力,拉力等于阻力。
当选择了飞行的对应巡航高度时,太阳能飞机的飞行速率是惟一的。
所以,太阳能飞机的设计关键在于改进其气动力设计点的性能。
另外,当飞机的巡航高度越高,就必须在一定程度上提高其巡航速度,这样就可以确保太阳能飞机的空气动力利用率更高[1]。
1.2能源均衡原理长航时临近空间作业中,太阳能无人机需要实现长时间的连续飞行航程,其最根本的要求就是,在白天内,所获取的太阳能必须要比飞机和其他装备一天一夜的能源消耗量高,如此周而复始,才能在长航时中航行几天甚至几个月。
高空长航时无人机气动力特点分析——解析太阳神和全球鹰的气动力设计

队长”太阳能无人飞机的后 j正在研制新的太阳能电池板,
继机。2001年8月12日首飞, j据说效率可从现在的1 9%
8月15日试飞即达到29400米 l提高到35%以上。但重量也
高度,留空18小时零1分。全 会增加。
机采用长方形飞翼式布局,没
飞机空重600千克,起飞
有尾翼。机翼很长,翼展达 }重量720~930千克,视飞行
事囊试飞时,雀低攀即出现
长艨期振荡.最终全机散架
墼毁≥这次改装是将鳖唾;=|}设 备舱捆鬣勰意。羹∞鼓4千
克.内镤弱攀_l}瓢曩币瓦的
达到1 o 5 4.5千克,增重 46%.整架飞机的重量分 布。转动惯薰都有很大变 化。由此造成了结构、气动 力和气动弹性变形等多方
Z鱼 j世 万IE旦方N垒数工匣据N垒L堂堂!叁工旧N一!.国鳗照窒盘壹….2Q_|;;!鱼!一多
75.3米,比大客机波音747
的翼展还要长约11米,但翼
弦长度只有2.4米,展弦比
31.3,翼面积181平方米,翼
型相对厚度12%。两侧机翼
外翼有10度上反角。机翼下
面有5个呈梯形的机体舱,高
约2.3米,上端基本上等于翼
弦长度,下端向前伸比翼弦
“太阳神”无人飞机最后的严重 俯仰长周期振荡(波状飞行)事故
了。上述估算也表明,“全球 }置,下设起降机轮。在机翼前
鹰”在19000米高度执行任务 l部沿翼展分布安装有14个无
虽然不能在最大升阻比状态, i电刷直流电动机,每个重5千
但已经很接近。整架无人飞机 {克,功率1.5千瓦。每个电动
气动设计是相当成功的。由于 机带动一副双叶定距宽弦螺
有这样大的升阻比,加上飞机 旋桨,直径2米。电动机转速
太阳能光伏板无人机巡检及无人机清洁方案
太阳能光伏板无人机巡检及无人机清洁方案一、方案目标本方案旨在建立一个全面、高效的太阳能光伏板无人机巡检及无人机清洁体系。
通过此方案,我们期望实现以下目标:1. 提高光伏板巡检效率,及时发现潜在问题;2. 降低光伏板清洁成本,提高清洁效果;3. 提升整个光伏电站的运营效率和经济效益。
二、关键技术1. 无人机技术:选用具有长航时、高清摄像头和稳定飞行性能的无人机,确保巡检和清洁工作的顺利进行。
2. 图像识别技术:利用图像识别技术对光伏板表面进行自动检测,识别污渍、遮挡物等异常情况。
3. 无人机自主控制技术:实现无人机的自动飞行、避障、路径规划等功能,提高作业效率和安全性。
4. 数据分析技术:对巡检数据进行分析处理,提供可视化报告,为光伏电站的运维提供决策支持。
三、实施步骤1. 调研阶段:了解光伏电站的规模、布局以及存在的问题,收集现场数据。
2. 方案设计阶段:根据调研结果,制定详细的巡检及清洁方案,包括无人机类型选择、巡检路线规划、清洁工具及方法确定等。
3. 技术研发阶段:开发无人机巡检及清洁所需的关键技术,进行技术验证和优化。
4. 实施阶段:进行现场安装调试,确保无人机系统正常运行。
开始巡检及清洁工作,并实时监控作业情况。
5. 评估阶段:对实施效果进行评估,收集反馈意见,持续改进方案。
四、预期成果1. 提高巡检效率:通过无人机自动巡检,大大缩短巡检周期,提高工作效率。
2. 降低运维成本:减少人工巡检和清洁的频率,降低人力成本和运维成本。
3. 提高电站效益:通过及时发现和处理问题,确保光伏板的最佳性能,提高整体电站的发电量和经济效益。
小型太阳能无人机方案设计研究论文
小型太阳能无人机方案设计研究论文本文将针对小型太阳能无人机方案设计研究论文进行探讨和分析。
近年来,随着科技的不断发展和人们对环保的重视,太阳能无人机已经成为了不少研究者的研究重点。
相比于传统的无人机,太阳能无人机具有清洁、高效、低成本等优势,深受大众喜爱。
一、方案设计太阳能无人机方案设计的关键在于如何充分利用太阳能来驱动飞行器。
当前的太阳能技术主要有光电转换和热能转换两种方式。
前者是将太阳光辐射转换成电能,后者则是将太阳辐射转化成热能,之后再将热能转换成电能。
本文将以太阳能电池板作为光电转换器来充分利用太阳能。
该方案设计的关键是:在保证光电转换效率的同时,将太阳能转化成电能供给飞行器使用。
电能储存是关键之一。
本设计采用深循环锂电池作为电能储存设备,可以保证飞行器在夜间或太阳能不足时依然可正常运行。
二、分析小型太阳能无人机的研究涉及到多个学科,如机械、电子、材料科学等。
设计方案的优劣往往是多个因素综合影响的结果。
下面将从机构设计、能量系统等多个角度对小型太阳能无人机进行分析。
机构设计方面,应该采用轻量化飞行器设计、翼展小的平尾式设计和较小的机身,从而达到减少能耗、增加载荷和提高飞行性能的目的。
能量系统方面,应该研发出高效的太阳能电池板和深循环锂电池,以保证长时间的飞行,提高飞行效率。
同时,在电池的选择上,应该结合飞行器的需求来选择合适的电池,以提高系统的安全性和稳定性。
航空控制系统也是小型太阳能无人机设计中的重要组成部分。
一个良好的控制系统应该具有高度稳定性、较高的飞行控制精度和自动导航能力。
同时还应该具备平台智能控制和安全保护等功能。
三、总结小型太阳能无人机方案设计研究论文是当前研究的热点之一。
太阳能无人机不仅具有环保、高效、低成本等诸多优势,而且在国民经济和军事领域中都具有重要的应用前景。
因此,小型太阳能无人机的研究具有很高的学术和实用价值。
总之,实现能效优化是小型太阳能无人机研究的核心目标。
太阳能光伏发电系统在无人机与航空器中的应用

太阳能光伏发电系统在无人机与航空器中的应用航空技术的快速发展带来了对可再生能源的需求,太阳能光伏发电系统正逐渐成为无人机与航空器领域的主要能源选择。
本文将探讨太阳能光伏发电系统在无人机与航空器中的应用,并介绍其优势以及面临的挑战。
一、太阳能光伏发电系统简介太阳能光伏发电系统是一种利用太阳能转换为电能的技术。
其主要组件包括光伏电池板、充电控制器、电池储能系统以及逆变器等。
光伏电池板通过吸收太阳光转换为直流电,并经过控制器进行充电和储存,最后通过逆变器将直流电转换为交流电供应给无人机或航空器使用。
二、无人机中的太阳能光伏发电系统应用太阳能光伏发电系统在无人机中得到广泛应用,主要体现在以下几个方面:1. 延长续航时间:传统无人机通常依赖电池供电,续航时间有限。
而利用太阳能光伏发电系统可以为无人机提供持续的电力,从而大大延长其在空中的飞行时间。
这对于需要长时间飞行或执行长距离任务的无人机而言,具有重要意义。
2. 环境友好:太阳能光伏发电系统利用的是清洁、可再生的太阳能资源,因此不会产生有害气体或废物,对环境几乎没有负面影响。
相比之下,传统燃油驱动的无人机排放废气和噪音,对大气和生态环境造成污染。
太阳能光伏发电系统的应用能够有效减少对环境的负荷,符合可持续发展的要求。
3. 灵活性与可靠性:太阳能光伏发电系统可以根据无人机的设计需求进行各种形式的布局与安装,不同的无人机类型可以根据光的角度和接收面积对太阳能光伏发电系统进行优化,以获得最佳的发电效率。
此外,太阳能光伏发电系统具有较高的可靠性,充电控制器和储能系统能够确保无人机在光照不足或夜间仍能正常工作。
三、航空器中的太阳能光伏发电系统应用除了无人机,太阳能光伏发电系统在航空器中也具有广泛应用前景。
主要体现在以下几个方面:1. 节能减排:航空器以石油为燃料进行驱动,燃烧过程中会产生大量二氧化碳等有害气体,并对大气层造成破坏。
而太阳能光伏发电系统的应用可以减少对燃料的依赖,从而减少对环境的污染,实现航空器的节能减排。
太阳能无人机设计方案
太阳能无人机设计方案太阳能无人机是利用太阳能作为动力源的无人机,其设计方案如下:1.太阳能电池板:在无人机机身上安装太阳能电池板,将太阳能转化为电能供无人机使用。
优选高效率的太阳能电池板,以提高光能转化效率。
2.飞行控制系统:设计先进的飞行控制系统,实时掌控无人机的飞行状态。
该系统应具备自动起飞和降落、定点悬停、自动避障等功能,保证无人机的稳定飞行。
3.能源管理系统:设计可靠的能源管理系统,用于储存和管理太阳能电能。
在太阳能不足或遇到临时阴天情况下,能源管理系统将自动切换到备用电源,保证无人机的连续运行。
4.传感器系统:安装适当的传感器系统,用于感知周围环境并实时获取环境信息。
传感器系统可以包括气象传感器、红外传感器、高清摄像头等,提供无人机飞行过程中所需的数据支持。
5.通信系统:建立可靠的通信系统,实现无人机与地面控制站之间的无线数据传输。
该通信系统应具备较高的抗干扰能力和远程传输能力,以支持无人机的遥控和数据传输。
6.机身结构和材料:选择轻量化、高强度的材料用于无人机机身的制造,以减轻重量并提高飞行效率。
同时,优化机身结构设计,提高无人机的稳定性和防护能力。
7.能量回收系统:设计能量回收系统,将无人机飞行过程中消耗的能量进行回收再利用,最大限度地降低能量的浪费,提高能源利用效率。
8.安全系统:为无人机设计安全系统,包括保护措施和预警系统,以避免无人机遭受外界攻击或意外撞击导致的损坏。
9.自主导航系统:开发自主导航系统,使无人机能够根据预设路径或目标自动导航。
自主导航系统应具备较高的精度和灵活性,以应对复杂的飞行环境。
10.应用扩展性:设计可拓展的无人机平台,以便后期根据需求进行功能的增加和改进。
例如,可以添加物资运输装置、激光测绘设备等,实现多种用途的应用。
通过以上设计方案,太阳能无人机可以更加高效地利用太阳能作为动力源,实现长时间持续飞行,并具备多种功能扩展能力,可以广泛应用于航拍、监测、农业等领域。
小型太阳能无人机方案设计研究论文

02
小型太阳能无人机总体方案设计
无人机总体设计需求
轻量化设计
为了满足太阳能驱动的需求, 无人机应采用轻量化材料,如 碳纤维复合材料,以降低能耗
。
稳定性要求
无人机在飞行过程中需要保持 稳定,因此设计时应考虑空气 动力学原理,优化机翼和机身 结构。
载荷能力
根据无人机应用场景,需具备 一定的载荷能力,以搭载必要 的传感器或摄像头等设备。
一体化设计
采用一体化设计思想,减少无人机 部件数量,简化结构,进一步降低 无人机重量。
无人机飞行控制技术
自主导航 飞行控制算法
遥控与遥测 故障诊断与容错
采用GPS、惯性导航等组合导航方式,实现无人机的精确定位 和自主导航,确保飞行安全。
设计先进的飞行控制算法,如PID、模糊控制、神经网络等,实 现无人机稳定、高效的飞行控制。
空气动力学优化:优化无人机翼型、 气动布局等,降低飞行阻力,减少能 耗,提高飞行速度和航程。
通过以上针对小型太阳能无人机的性 能分析与优化,可以进一步提高无人 机的飞行性能,拓展其在侦察、监测 、通信等领域的应用。
05
小型太阳能无人机实验验证与结 果分析
实验设计与方法
实验目标
验证小型太阳能无人机的可行性、效率和安 全性。
意义
本研究旨在设计一种高效、稳定的小型太阳能无人机方案,为其在实际应用中的 性能表现和可行性提供理论支持和实践指导。这对于推动太阳能无人机技术的发 展、促进环保产业的繁荣,具有重要的现实意义和学术价值。
国内外研究现状与发展趋势
国内研究现状
近年来,国内学者在太阳能无人机领域开展了大量的研究工作,主要集中在机翼设计、动 力系统优化、控制策略改进等方面。取得了一系列重要成果,如XX型号太阳能无人机成 功实现长航时飞行、XX团队开发出高效能太阳能电池板等。
太阳能飞机方案设计(广州大学)
太阳能飞机方案设计
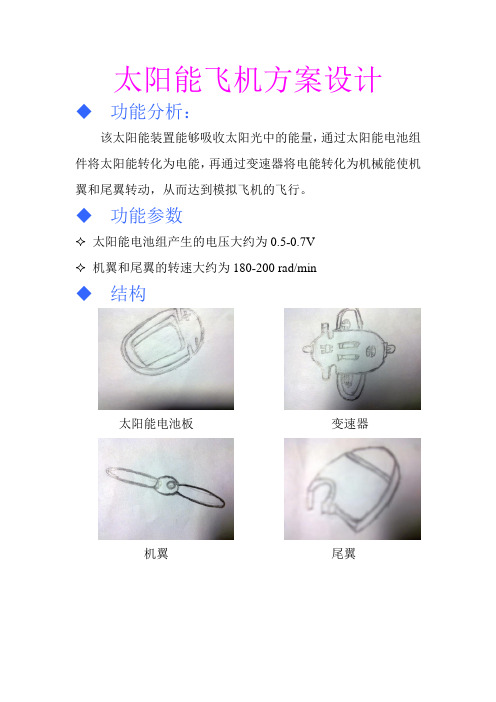
◆功能分析:
该太阳能装置能够吸收太阳光中的能量,通过太阳能电池组件将太阳能转化为电能,再通过变速器将电能转化为机械能使机翼和尾翼转动,从而达到模拟飞机的飞行。
◆功能参数
✧太阳能电池组产生的电压大约为0.5-0.7V
✧机翼和尾翼的转速大约为180-200 rad/min
◆结构
太阳能电池板变速器
机翼尾翼
底盘连杆
支杆导线
◆制作过程:
✧第一步将机翼和尾翼分别接入变速器转轴的前后两端,如图1
所示
✧第二步:将第一步所得的飞机模型通过支杆与底盘连接,如
图2所示
✧第三步:通过连杆将太阳能组件与底座连接起来,如图3所
示
✧第四步:用两根导线将太阳能电池的正负极与变速器的正负
极相连接,最后便得到我们的太阳能飞机模型,其三视图如图4-7所示
图1
图2
图3
图4:45°视图
图5:主视图
图6:侧视图
图7:俯视图
评价:
该装置主要适用于作为儿童启发科学知识的模型,其生动的模拟必使儿童对科学产生浓郁的兴趣。
因为该模型不仅在能量的转化中没有任何有害物质产生,而且它只要在常温,有明媚阳光下的照耀下便可以快速转动,这些优点不仅能够节约能源,而且绿色环保,没有污染物的产生,所以,它是一款很好的儿童科普
教育模型!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
长航时太阳能无人机的设计优化ETHZ讲座会议飞机和航天器系统设计,建模与控制一.引言若干年前,能够依靠太阳能动力实现连续飞行一直是个梦想,但是现在这个梦想已经成真。
事实上,在在柔性太阳能电池板、高能量密度的电池、小型化MEMS与CMOS传感器以及强大的处理器等领域已经取得显著进展。
其实太阳能飞机的原理很简单,装有太阳能电池板的机翼在太阳光的照射下获得电能,将能量用于螺旋桨推进系统,控制电路,并将剩余的电能用蓄电池储存起来。
当夜晚来临的时候,将白天储存在电池里的电能慢慢释放用于驱动飞机各系统直到第二天太阳升起。
尽管如此,对于飞机的优化和整合以及技术方面的努力是必要的。
主要的工作是将不同功能的部件尽量能以相同的标准考量。
例如飞机的续航时间,就是一个需要综合考量的因素。
在2004年,洛桑联邦理工学院/苏黎世联邦理工学院的自主实验室与欧洲航天局共同提出了“Sky-Sailor”这个项目。
这个项目是通过学习和研究自主导航控制的太阳能无人机在地球表面的飞行来验证火星专用版本的可行性。
本次讲座介绍的方法,用于全球范围内设计,旨在实现在地球上能够连续飞行的太阳能飞机。
这种方法最早用于Sky-Sailor 项目,但是对于从几百克到翼展几十米的高空长航时无人机仍然具有通用性。
1.太阳能飞机的历史1.1太阳能航空模型飞机概述世界上首架太阳能飞机于1974年11月4日,在美国加利福尼亚州试飞,飞机名叫“Sunrise I”,由来自于Astro Flight 公司的R.J. Boucher设计。
飞机在100m左右的高度飞行了大约20分钟。
它的另一个改进版本“Sunrise II”很快被设计制造出来并且在1975年9月12号首飞,第二架飞机使用了新的太阳能电池板,比第一架飞机上的电池板效率高出14个百分点,总功率高达600W。
Helmut Bruss 和Fred Militky是在欧洲范围内第一个吃螃蟹的,在1976年8月16日,他们的模型“Solaris”在150秒内连续三次爬升到50m的高度[3].很久以来,许多设计制作飞机的人都尝试让飞机依靠太阳能飞行,这些想法变得越来越可行。
最初,飞行时间只有短短的几秒,后来迅速的增长到几分钟以至于几小时[3]。
这其中最具代表性的有1996年的Dave Beck和他的飞机Solar Solitude以及90年代创造了很多记录的Wolfgang Schaeper和他的飞机Solar Excel还有98年的Sieghard Dienlin以及他的微型飞机PicoSol。
2.2有人操纵的太阳能飞机在许多太阳能模型飞机通过飞行证明了只要有足够的照度连续的飞行是可行的之后,那些70年代的太阳能飞机的先驱者便将有人驾驶的飞机作为新的挑战。
最初的模型飞机,像Fred To的Solar One和Larry Mauro的Solar Riser就是利用电池板在地面上给飞机的电池充电,然后实现短时间的持续飞行。
而美国的Dr. Paul B. MacCready 和他的AeroVironment公司实现的仅仅利用太阳能而不用任何储能装置实现连续飞行是具有革命意义的。
1980年5月18日,被认为是世界上第一个有人操纵的太阳能飞机Gossamer Penguin 实现了首飞。
1981年7月7号,它的改进版的名叫Solar Challenger的飞机实现了仅仅利用太阳能动力穿越了英吉利海峡。
在德国,Günter Rochelt 所制造具有16m翼展和一个电池的Solair I 太阳能飞机在1983年8月21日主要利用太阳能动力和上升气流实现了5小时41分钟的飞行。
1986年美国的Eric Raymond开始设计它的名叫Sunseeker的飞机在1989年这架飞机先进行了无电池板的滑翔飞行,在1990年的8月,这架飞机通过21次的起飞降落和120小时的空中飞行穿越了整个美国。
在1996年Berblinger比赛在Ulm举行,比赛的所提出的项目是设计一个真正意义上的能够在照度相当于夏天晴好天气一半的情况下持续飞行的飞机。
最终来自Stuttgart 大学Rudolf 教授的Voit- Nitschmann队所设计的Icaré 2赢得了冠军。
1.3通往高空长航时无人机(HALE)平台的路在Solar Challenger成功以后,美国政府对AeroVironment公司进行投资用于研究可行的长航时太阳能发电驱动的高空飞机。
在1993年,一架名叫Pathfinder的245公斤30平方米机翼面积的飞机在高空进行了测试,并在1994年成为了NASA的环境研究飞机传感器技术(ERAST)项目的一部分。
从1994年到2003年,这个项目取得了一系列的成功包括三架名叫Pathfinder Plus, Centurion 和Helios的飞机。
后者确定将作为最终的包含为夜间飞行所准备的电池的“永不降落的飞机”。
在2001年Helios创造了一个的世界纪录达到了29524米的高空。
但是不幸的是在2003年6月26日由于结构失效它最终坠毁到了太平洋里,因而无法证明其“永不降落”。
在欧洲,也有许多研究HALE平台的项目,在飞机系统的DLR学会上,在1994年到1998年期间发展了Solitair飞机项目[23],在2000年1月到2003年5月许多欧洲组织给Solitair飞机项目投资,以用来学习研究可想的高空长航时太阳能无人机平台的研究,用来实现宽带通信和地球观测。
一个名叫QinetiQ的英国公司在HALE平台领域也异常活跃,他们制造的名叫Zephyr的飞机在2006年7月连续飞行了18个小时,其中包括7个小时的夜间飞行。
它最近被选为Flemish HALE基础平台的无人机用于Mercator遥感系统的框架在Pegasus 项目。
该平台应该满足像森林火灾监测、城市地图,沿海监视等任务。
但是客观地来说,在2005年4月22日Helios太阳能飞机证明了不间断的无人飞行器是可以实现的。
AcPropulsion的总裁和创始人Alan Cocconi的Solong飞机只依靠太阳能动力和沙漠里的上升气流飞行了24小时11分钟。
飞机4.75米的翼展和11,。
5公斤的重量确保其能在两个月后的6月3日实现持续48小时16分钟的不间断飞行。
未来证明连续飞行的梦想将会在通过载人飞行的Solar-Impulse实现,这是一个在瑞士的80米的翼展的轻量级太阳能飞机项目。
在2007-2008年生产了一个60m翼展的试验机和2009-2010年最终版本的飞机之后,在每一个大陆停留的环球飞行应该会在2011年5月实现。
2原理简述太阳能电池板由许多太阳能电池片通过特定的连接组成,它覆盖在飞机的机翼或者飞机的其他表面上(如平尾,机身)。
白天,通过阳光和倾斜射线的照射和,电池板将光能转化成电能。
一个名叫最大功率追踪器的装置保证任何时候从电池板获得最高的功率。
获得的电能首先保证动力装置和电子系统的工作,其次将剩余的电能给电池充电。
在夜间,飞机仅仅依靠电池的能量来控制飞机,而没有任何来自太阳能电池板的能量。
如图所示:二.概念设计理论飞机设计是一中通过纸上运算来创造一个新的飞行器的工作。
设计过程通常分为三个步骤或者平行的设计步骤:概念设计、初步设计以及详细设计这种方法将重点放在概念设计,就是一般的外形和尺寸的确定。
一些通过空气动力学理论得到的初步设计参数和重量参数交汇,得到一个最佳的外形。
可行的设计是达到一个给定的目标,但是详细的外形是没有限制的。
我们也将只考虑水平飞行。
无论是为了实现低海拔检测还是高空通信平台,一个太阳能飞机必须有能够达到在一定高度连续飞行的能力。
事实上,高海拔检测作用将会极其有限,而低海拔检测没有能力覆盖足够的区域。
在这种情况下,能量和质量平衡就是设计的起点。
事实上,白天收集的来自太阳能电池板的能量必须足以驱动电动机,机载电子设备并且能够给电池充电,而电池要提供足够从黄昏到第二天早上飞行的能量,直到第二天一个新周期开始。
同样,升力要平衡飞机重量,以便维持高度。
这最后导致一个“母鸡和鸡蛋”的问题:所需的功耗来自不同的部分,如电机、太阳能电池板、电池等。
但同时,这些零件确定了飞机的总重。
而总重又决定了飞机的所需功率。
这些关系将在本节说明。
1. 辐照度模型一个好的辐照度模型取决于变量如地理位置、时间、太阳能电池板方向和反照率等我们所需要的因素[7]。
该模型简化为平面通过一个正弦曲线,如图所示:Fig. 2 Approximation of irradiance with a sinusoid (Lausanne, June 21)最大光照度I max和持续光照时间T day是由不同的地点和日期决定的,这些是计算每天每平方米能量的因子,就像公式1所显示的一样。
为了考虑多云天,一个介于0和1之间的常数添加到公式中。
solmargindaymax -2/T I k E density day *=π (1)2. 平飞时的功率平衡水平飞行时作用到飞机上的力为升力L 和阻力D 定义为2L SV 2C L ρ= 2D SV 2C D ρ= (2) CL 和CD 分别升力和阻力系数,ρ是空气密度,S 是机翼面积V 是飞机相对于没有风时的相对于地面的相对速度。
CD 和CL 是由翼型,攻角α雷诺数Re 和马赫数Mach 决定的。
阻力系数是由翼型的阻力系数C Da 跟升力无关的寄生阻力(这里我们忽略)和诱导阻力C Di 组成。
C Di 定义为:AR e C C 2Di L π= (3)e 是奥斯瓦尔德因子,AR 是机翼的展弦比。
根据公式2得到平飞所需功率:ρ2)(C P 32/3D level S mg C L = 4)将S 用b 和AR 代替得到公式:b C L 23m ARg 2C P 32/3D level ρ= (5) 接着,为了推算出平飞所需总功率,电机、电子控制器、减速组、螺旋桨的效率都应该被考虑到,还有控制系统的功率,负载的功率也应该考虑到。
为了方便阅读,这些因素在这里将不再赘述,而将会在后面的图7中显示出来。
3. 质量估计模型对于飞机的每个部件,对于计算总质量来说一个好的质量模型是必须的,并且总质量也将用于公式5中的计算。
简单的质量模型将不会以公式表达出来,而将会在在后文的图7中显示。
控制和导航系统的质量是确定的,这是一开始就定义好的。
电池的质量和其储存的能量成正比。
和平飞总功率、夜晚续航时间以及电池的能量密度成反比。
对于太阳能飞机来说,我们可以发现电池板铺设的区域每天所吸收的太阳光的能量与飞机一天所消耗的能量是相等的。
mppt cells solar in solm day dischrg chrg nightday A k T I T T ηηηηarg max tot -elet 2/)(P π=+* (6)得到的区域A solar 将会在后面用来推导电池板的质量,包括封装它的无反射片聚合物的己量也将被考虑进来。