模拟乘法器的介绍
模拟相乘器
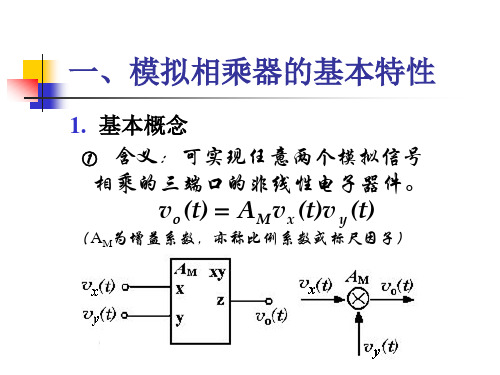
扩大v1 、v2的动态范围,实现任意两个模拟 信号的相乘。
➢ 框图: 流控吉尔伯特电路
V-I 线性变换器
V-I 线性变换器
➢ 电路:
1) 流控吉尔伯特电路
➢ 电路:
➢ 实现:
i
iI
iII
1 iK
( iC5
iC6
)( ie7
ie8
)
[( iC5
iC6
)( ie7
ie8
)]
2) 电压—电流线性变换器
➢ 零输入响应 : 零输入状态时,是非零的输出, 存在误差电压(输出失调电压和馈通误差电压)。
➢ 直流传输特性 (一个输入为直流时)
➢ 平方律特性( vx vy 时 )
② 非线性传输特性 ③ 正弦信号传输特性
一、模拟相乘器的基本特性
误差分析(静态误差 (vx vy)) 引起误差原因:
AM AM A
2) 工作原理
➢
i
iI
iII
I0th
qv2 2kT
th
qv1 2kT
➢ 分类讨论
i) V1m>26mv, V2m>26mv 无意义,说明v2必须为小信号
ii) V1m<26mv, V2m<26mv 实现近似理想相乘
iii) 26mv<V1m<260mv , V2m<26mv iv) V1m≥260mv , V2m<26mv
3. 特点
3) 易于实现电流的存贮与转移
➢ 动态电流镜可作为偏置电流,或作为电流1:1拷贝、 倍乘或整除。
➢ 广泛用在开关电流滤波器、开关电流A/D、D/A转换 器中。
4) 便于实现电流与电压的线性与非线性转换
实验四. 模拟乘法器应用实验
2ωc 成 分 及 2ωc+Ω,2ωc,Ω 等 成 分 , 只 要 通 过低通滤波器便可以得到只有Ω成分的调制信 号,从而完成了检波作用。
图10.同步检波的实现框图如下:
6.鉴相:所谓鉴相就是相位检波,用以比较两相 同频率的信号的相位差,原理框图如图11所示。
图11.鉴相器实现框图如下:
ux=ui=Uicosωit uy=KUicos(ωit+φ)
即满足:
15V≥(U6,U12)-(U8,U10)≥2V 15V≥(U8,U10)-(U1,U4 )≥2.7V 15V≥(U1,U4)- U5≥2.7V
2.静态偏流的确定
静态时,因差分各管的基极偏流很小,因此
乘法器的静态偏置电流主要由恒流源Io的值确 定。当器件单电源工作时,14脚接地,5脚外
接偏置电阻到Vcc,由于Io是I5的镜像电流, 所以改变电阻R5可以调节Io的大小,即 Io≈I5=(12V-0.7)/(R5+500Ω) 当器件为双电源工作时,引脚14接负电源.UEE (一般接-8V),5脚通过电阻R5接地,因此,
6. 用MC1596实现同步检波:按原理电路(图1)连 接,当输入端加入调幅波信号时,该信号载波 频率为500KHz,大小为50mV,调制频率为1KHz, m=30%时,分别观察图中A、B、C及输出Uo(t)的 波形。
扩展命题
1. 用模拟乘法器实现鉴频:实验电路如图2。输入 信号Us其载频fc=10.7MHz,调制频率F=1KHz, 频偏Δfm=75KHz,载波幅度Ucp.p=40mV,观察 Uo(t),并测出整个电路的特性曲线.即鉴频特 性曲线(本实验用扫频仪进行),扫频仪的使用 请参考本章第一节相关内容。图2给出的是用 模拟乘法器MC1596实现的相位鉴频电路。其中 C1与并联谐振回路LC共同组成线性移相网络, 将调频波的瞬间时频率变化转变为瞬时相位的 变化(即FM波变为FM-PM)。MC1596的作用是 将FM波与FM-PM波相乘,输出端接集成的差分 放大器将双端输出变为单端输出,再经RC构成 的LPF输出。
模拟乘法器的调查报告

模拟乘法器的调查报告陈凤通信与信息系统一、 模拟乘法器的基本原理现在,常用的模拟乘法器基本上都已实现集成化。
而且集成模拟乘法器是一种重要的非线性器件,广泛应用于频率变换、信号处理电路中,构成调制、解调或其它电路。
随着集成技术的发展和应用的日益广泛,它已成为继集成运算放大器后最通用的模拟集成电路之一。
下面简单介绍一下模拟乘法器。
(一)模拟乘法器的基本特性模拟乘法器是实现两个模拟量相乘功能的器件,理想乘法器的输出电压与同一时刻两个输入电压瞬时值的乘积成正比,而且输入电压的波形、幅度、极性和频率可以是任意的。
其符号如下图一中(a )和(b)所示,K 为乘法器的增益系数。
图一 模拟乘法器符号图理想乘法器—对输入电压没有限制, u x = 0 或 u y = 0 时,u O = 0,输入电压的波形、幅度、极性和频率可以是任意的 。
实际乘法器当u x = 0 , u y = 0 时,u O ≠ 0,此时的输出电压称为输出输出失调电压。
u x = 0,u y ≠ 0 (或 u y = 0,u x ≠ 0)时,u O ≠ 0,这是由于u y (u x )信号直接流通到输出端而形成的,此时 的输出电压为u y (u x )的输出馈通电压。
(二)变跨导模拟乘法器的基本工作原理变跨导模拟乘法器是在带电流源差分放大电路的基础上发展起来的,其基本原理电路如下图所示 。
在室温下,K 为常数,可见输出电压u O 与输入电压u y 、u x 的乘积成正比,所以差分放大电路具有乘法功能。
但u y 必须为正才能正常工作,故为二象限乘法器。
当 u Y 较小 时,相乘结果误差较大,因 I C3 随 u Y 而变,其比值为电导量,称变跨导乘法器.二、模拟乘法器在振幅调制解调中的应用(一)信息传输的基本概念1.对传输信号进行调制的原因(1)根据电磁波理论,天线尺寸大于信号波长的十分之一,信号才能有效发射。
如声音信号的频率范围为0.1 ~ 6 kHz。
《模拟乘法器》课件

# 模拟乘法器 本课程将介绍模拟乘法器的原理及其应用。
模拟乘法器的定义
பைடு நூலகம்
作用
模拟乘法器用于实现模拟 信号的乘法运算,将不同 信号相乘得到新的信号。
原理
模拟乘法器基于电子元件 的特性,通过电压或电流 乘法进行运算。
分类
模拟乘法器可以根据不同 的实现方式和应用场景进 行分类。
模拟乘法器的应用
电子测量中的应用
模拟乘法器在测量仪器中用于信号放大和校正,提高测量精度。
通信系统中的应用
模拟乘法器在通信系统中用于信号调制、解调和频谱分析。
音频系统中的应用
模拟乘法器在音频系统中用于音频效果处理和音频信号放大。
模拟乘法器的实现
电路实现
模拟乘法器可以通过电路设计和集成电路制 造来实现。
软件实现
模拟乘法器也可以通过软件算法来实现,例 如在数字信号处理中。
2 应用前景
模拟乘法器在未来将继续发挥重要作用,随着科技的发展将有更广泛的应用。
参考文献
1. 2. 3.
Author 1. Title 1. Publisher 1. Author 2. Title 2. Publisher 2. Author 3. Title 3. Publisher 3.
模拟乘法器的应用案例
电子秤上的应用
模拟乘法器在电子秤中用于 测量物体的重量并进行计算。
无线电通信系统中 的应用
模拟乘法器在无线电通信系 统中用于信号调制和解调, 实现高质量的通信。
音频放大器中的应 用
模拟乘法器在音频放大器中 用于调节音量和音频效果的 处理。
总结
1 优点和不足
模拟乘法器的优点包括快速响应和高精度,但也存在精度损失和成本较高的不足。
9-3 模拟乘法器
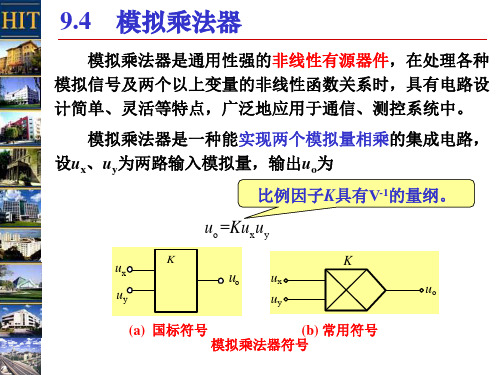
模拟乘法器是通用性强的非线性有源器件,在处理各种 模拟信号及两个以上变量的非线性函数关系时,具有电路设 计简单、灵活等特点,广泛地应用于通信、测控系统中。
模拟乘法器是一种能实现两个模拟量相乘的集成电路, 设ux、uy为两路输入模拟量,输出uo为
比例因子K具有V-1的量纲。
uo =Kux uy
ui
ux uy
K
uo
uo Kui2
平方运算电路
K1 ui
K2 uo uo Kui3
立方运算电路
2. 除法运算 除法运算电路由运算放大器和 模拟乘法器组合而成。 乘法器作为集成运放的反馈通 路,必须引入负反馈才能实现正确 ux > 0 的运算关系。
K
uo1 i2 R1 i1 R' A uo R2
KU1U2 uo = cos cos 1 2 t 1 2 1 2 t 1 2 2
接入低通滤波器,抑制高频分量
1 uo KU1U 2 cos 1 2 2
1. 乘法运算 将乘法运算电路的两个输入端并联在一起就是乘方运 算电路。
k3k2k1(uxuy) 反对数运算电路
uo
k1lnuy
对数反对数型模拟乘法器
uO Kuxuy
比例因子 K k1k2 k3
9.4.2 模拟乘法器的主要参数
1. 输出失调电压uoo 当ux=uy=0时,uo 0,此时的输出电压称为输出失调 电压。 2. 满量程总误差E 乘法器的实际输出与理想值之间的最大偏差称为总误 差。满量程总误差是指当ux=uxmax,uy=uymax时,实际输出 与理想输出的最大相对偏差的百分数。 3. 馈通误差EF 当ux= 0,uy 0时,理想乘法器的输出uo= 0 。但是由 于乘法器输入端存在输入失调电压,从而使uo 0。因此, 馈通误差EF定义为:在模拟乘法器有一个输入端等于零, 另一个输入端加规定幅值和频率的信号时,输出不为零的 数值。
模拟乘法器
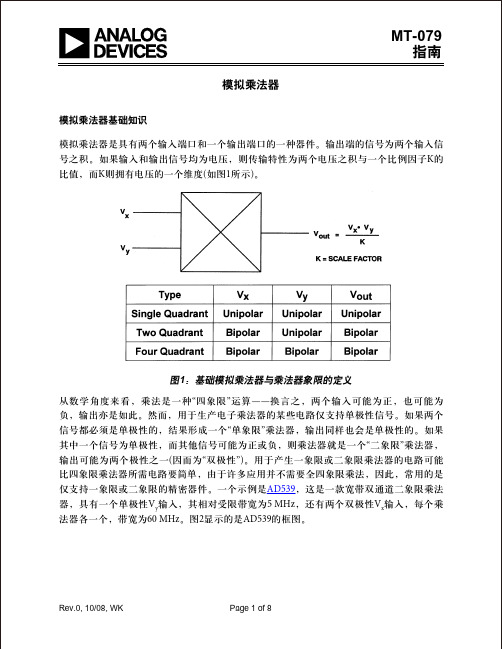
图1:基础模拟乘法器与乘法器象限的定义从数学角度来看,乘法是一种“四象限”运算——换言之,两个输入可能为正,也可能为负,输出亦是如此。
然而,用于生产电子乘法器的某些电路仅支持单极性信号。
如果两个信号都必须是单极性的,结果形成一个“单象限”乘法器,输出同样也会是单极性的。
如果其中一个信号为单极性,而其他信号可能为正或负,则乘法器就是一个“二象限”输出可能为两个极性之一(因而为“双极性”)。
用于产生一象限或二象限乘法器的电路可能比四象限乘法器所需电路要简单,由于许多应用并不需要全四象限乘法,因此,常用的是仅支持一象限或二象限的精密器件。
一个示例是AD539,这是一款宽带双通道二象限乘法器,具有一个单极性Vy 输入,其相对受限带宽为5 MHz,还有两个双极性Vx输入,每个乘法器各一个,带宽为60 MHz。
图2显示的是AD539的框图。
图2:AD539模拟乘法器框图最简单的电子乘法器采用对数放大器。
计算依赖于以下事实:两个数的对数之和的反对数为这两些数字之积(如图3所示)。
图3:利用对数放大器实现乘法运算图4:基础跨导乘法器这是一种性能很差的乘法器,因为(1) Y 输入被随V Y 非线性变化的V BE 抵消;之间存在指数关系,因而X 输入呈现非线性;(3) 比例因子随温度而变化。
图5:基础跨导乘法器如此,吉尔伯特单元有三个不便之处:(1) 其X输入为差分电流;(2) 其输出为差分电流;输入为单极性电流——因此吉尔伯特单元只是一个二象限乘法器。
通过交叉耦合两个这样的单元并使用两个电压-电流转换器(如图6所示),我们可以把基础架构转换成一种带电压输入的四象限器件,如AD534。
在中低频率下,可以用一个减法器放大器把输出端的差分电流转换成电压。
鉴于其电压输出架构,AD534的带宽仅为1 MHz 左右,而后续版本AD734的带宽则为10 MHz。
图6:AD534:一款四象限跨导线性乘法器Q1A和Q1B以及Q2A和Q2B形成两个吉尔伯特单元的两对核心长尾对,而Q3A 则为两个单元的线性化晶体管。
《模拟电子技术基础》教学课件 7.2模拟乘法器及其应用
T4 -UEE
7.2 模拟乘法器及其应用 2. 在运算电路中的基本应用
(1)乘法运算
(2)乘方运算
uO kuI1uI2
实际的模拟乘法器k常为+0.1V-1或-0.1V-1。
若uI 2Ui sin t 则uO 2kUi2 sin2 t 2kUi2 (1 cos2 t)
uO k uI2
实现了对正弦电压的二倍频变换
7.2 模拟乘法器及其应用
(3)除法运算
i2
i1
运算电路中集成运放必须引入负反馈!
为使电路引入的是负反馈,k和uI2的极性应如何?
i1 i2 uI1 uO' R1 R2
uO'
R2 R1
uI1
k uI2uO
uO
R2 R1
uI1 k uI2
7.2 模拟乘法器及其应用
(4)平方根运算电路
ui>0时平方根运算电路
7.2 模拟乘法器及其应用 7.2.1模拟乘法器的基本概念
1.模拟乘法器的定义 模拟乘法器,就是实现两个模拟信号相乘功能的非线性电子器件。 2.模拟乘法器的符号
uO kuXuY
3.模拟乘法器的分类 按照输入电压信号允许的极性,分为变跨导式二象限和双平衡式四象限。
7.2 模拟乘法器及其应用
7.2.2 模拟乘法器的工作原理
ui<0时平方根运算电路
uo1
=
-
R2 R1
ui
uo1 = Kuo2
uo =
- R2 KR1
ui
7.2 模拟乘法器及其应用
3. 调制解调器 (1)调制
(2)解调
在调制过程中,音频信号需要用高频信号来运载, 解调是调制的逆过程。 高频信号称为载波信号,音频信号称为调制信号。 即从调幅波提取调制信号的过程称为解调。
模拟乘法器及其应用讲解
模拟乘法器及其应用摘要集成模拟乘法器是继集成运算放大器后最通用的模拟集成电路之一,是一种多用途的线性集成电路。
可用作宽带、抑制载波双边平衡调制器,不需要耦合变压器或调谐电路,还可以作为高性能的SSB乘法检波器,AM调制/解调器、FM解调器、混频器、倍频器、鉴相器等,它与放大器相结合还可以完成许多的数学运算,如乘法、除法、乘方、开方等。
The integrated analog multiplier is the second one of the analog integrated circuitoperational amplifier after the general linear integrated circuits, is a multi use. Can be usedas broadband, suppressed carrier double balanced modulator, does not require a coupling transformer or tuning circuit, also can be used as SSB multiplication detector of high performance, AM modulator / demodulator, FM demodulator, mixer, multiplier, the phasedetector, and it can also complete theamplifier combining mathematical operation many, such as multiplication division,involution, evolution, etc..一、实验目的1.了解模拟乘法器的工作原理2.掌握利用乘法器实现AM调制、DSB调制、同步检波、倍频等几种频率变换电路的原理3.学会综合地、系统地应用已学到模、数字电与高频电子线路技术的知识,通过MATLAB掌握对AM调制、DSB调制、同步检波、倍频电路的制作与仿真技术,提高独立设计高频单元电路和解决问题的能力。
模拟乘法器输出与输入的关系式
模拟乘法器输出与输入的关系式模拟乘法器是一种电路,可以将两个输入信号相乘,输出它们的乘积。
这种电路通常用于模拟信号处理中,例如音频处理和图像处理。
在理解模拟乘法器的工作原理时,我们需要了解输出信号和输入信号之间的关系式。
具体而言,我们需要知道输出信号与输入信号的幅度和相位之间的关系。
假设我们有两个输入信号x1(t)和x2(t),它们的幅度分别为A1和A2,相位分别为θ1和θ2。
我们可以将它们表示为:x1(t) = A1cos(ωt + θ1)x2(t) = A2cos(ωt + θ2)其中,ω是角频率,t是时间。
模拟乘法器将两个输入信号相乘,得到输出信号y(t)。
输出信号的幅度和相位与输入信号有如下关系:y(t) = A1A2cos(θ1 + θ2)cos(ωt) - A1A2sin(θ1 + θ2)sin(ωt)其中,cos(θ1 + θ2)和sin(θ1 + θ2)是输入信号之间的相位差。
我们可以使用三角函数的恒等式将它们展开为:cos(θ1 + θ2) = cosθ1cosθ2 - sinθ1sinθ2sin(θ1 + θ2) = sinθ1cosθ2 + cosθ1sinθ2将它们代入输出信号的公式中,我们得到:y(t) = A1A2(cosθ1cosθ2 - sinθ1sinθ2)cos(ωt) -A1A2(sinθ1cosθ2 + cosθ1sinθ2)sin(ωt)化简后,我们得到:y(t) = A1A2cos(θ1 - θ2)cos(ωt) - A1A2sin(θ1 - θ2)sin(ωt)这就是模拟乘法器输出信号和输入信号之间的关系式。
它告诉我们,输出信号的幅度和相位都与输入信号的幅度和相位以及它们之间的相位差有关。
总之,了解模拟乘法器输出信号和输入信号之间的关系式对于设计和理解模拟信号处理电路非常重要。
7.3 模拟乘法器及其在运算电路中的应用
′ uO
uI3
R2 100k R1 N uI1 10k P +A uI2 R1 R2
uO
ห้องสมุดไป่ตู้
§7.3
模拟乘法器及其 在运算电路中的应用
一、模拟乘法器简介
模拟乘法器有两个输入端,一个输出端, 模拟乘法器有两个输入端,一个输出端,输入 及输出均对“ 而言。 及输出均对“地”而言。模拟乘法器的符号如图所 输入的两个模拟信号是互不相关的物理量, 示。输入的两个模拟信号是互不相关的物理量,输 出电压是它们的乘积, 出电压是它们的乘积,即
uX uY uO
uo=kuXuY
理想模拟乘法器应具备的条件: 理想模拟乘法器应具备的条件: 1、 ri1和ri2为无穷大; 、 为无穷大; 2、 ro为零; 、 为零;
+ ∆u X ro + ∆uO -
+ ∆uY - -
ri2
ri1
k ∆uX ∆uY
3、k值不随信号幅值而变化,且不随频率变化; 、 值不随信号幅值而变化 且不随频率变化; 值不随信号幅值而变化, 4、当uX或uY为零时, uo为零,电路没有失调电压、 、 为零时, 为零,电路没有失调电压、 电流和噪声。 电流和噪声。
i2 A + R3
uI2
uO
i1 = i2
′ uO kuI 2 uO uI 1 =− =− R1 R2 R2
R2 uI 1 uO = − kR1 uI 2
3、开方运算电路
在运算电路中, 在运算电路中,必须 R2 + - R1 保证电路引入的是负反 uI 馈。所以uI小于零。 所以 小于零。 i
′ uO
二、变跨导型模拟乘法器的工作原理(自学) 变跨导型模拟乘法器的工作原理(自学)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图4.2.1 二象限变跨导乘法器
4.2.1.1二象限变跨导模拟乘法器 二象限变跨导模拟乘法器 图4.2.1所示为二象限变跨导模拟乘法器。从电路结构上看,它是一个恒流源差分放大电路, 不同之处在于恒流源管T3的基极输入了信号,其恒流源电流I0受控制。
v x = v BE
1
− v BE
2
根据PN结伏安特性方程,三极管电流为
根据差分电路转移特性分析可知,若
v x << 2VT
v0 = iod RC = 2 RC v R v y th( x ) ≈ C v x v y = Kv x v y Ry 2VT R yVT
相乘增益——
图4.2.3
双平衡模拟乘法器
根据上述分析 ① v
x
vy
的极性均可正、可负,实现四象限相乘
控制信号的线性范围大,温度对T5、T6差分电路影响小,并可通过改变Ry来控制 ② vy 相乘增益K。 ③
1、静态误差 设乘法器的直流输入电压为X和Y,考虑各种因素引入的输出误差后,乘法器输出电 压Z的特性方程可表示为
Z=(K土△K)[(X土XOS) (Y±YOS)]土ZOS土N(X、Y) ≈KXY土△KXY±KXYOS土KYXOS土KXOSYOS土ZOS土N (X、Y) 式中,△K——相乘增益K的误差; XOS——X通道输入失调电压; YOS——Y通道输入失调电压; ZOS——乘法器固有输出失调电压; N(X、Y)——乘法器的非线性引起的输出误差电压。
第 4章 模拟集成乘法器 章
模拟集成乘法器能实现两个互不相关的模拟信号间的相乘功能。 模拟集成乘法器能实现两个互不相关的模拟信号间的相乘功能。 应用领域: 应用领域: ①模拟运算方面 无线电广播、电视、通信、测量仪表、医疗仪器以及控制系统, ②无线电广播、电视、通信、测量仪表、医疗仪器以及控制系统, 进行模拟信号的变换及处理。 进行模拟信号的变换及处理。 目前,模拟集成乘法器已成为一种普遍应用的非线性模拟集成电路。 目前,模拟集成乘法器已成为一种普遍应用的非线性模拟集成电路。 本章先阐述内容: 本章先阐述内容: ①模拟乘法器的特性及基本工作原理 ②介绍几种典型的单片模拟集成乘法器及其外围元件的设计计算 和调整。 和调整。 模拟集成乘法器在运算和信号处理方面的应用。 ③模拟集成乘法器在运算和信号处理方面的应用。
图4.2.4XFC—1596内部电路
图4.2.5 线性化双平衡模拟乘法器
4.2.1.3 线性化双平衡模拟乘法器 图4.2.5所示为线性化双平衡模拟乘法器,又是改进型XFC一1596的内电路。它由T1~ T6及恒流源 构成的双平衡模拟乘法器和D1、D2及T7、T8,恒流源 构成的线性补偿 I OY 网络等两部组成。图中D1、D2的电压降为
4.1模拟集成乘法器基本概念与特性 模拟集成乘法器基本概念与特性
模拟乘法器具有两个输入端口X和Y及一个输出端口Z,是一个三 端口非线性网络,其符号如图4.1.1所示。 一个理想的模拟乘法器,其输出端的瞬时电压仅与两输入端的 瞬时电压和[、的波形、幅值、频率均是任意的]的相乘积成正比, 不含有任何其它分量。模拟乘法器输出特性可表示为
,否则双曲正切反函数无意义。
4.2.2、 4.2.2、模拟乘法器的运算误差和技术参数 4.2.2.1模拟乘法器的运算误差 上述模拟乘法器工作原理分析过程中,把乘法器看作是一个理想器件,推导出如式 (4.2.24)所示的线性输出特性方程。实际上,不可能实现绝对理想的相乘,由于电路中 各种因素的影响,模拟乘法器会产生静态(直流)误差和动态(交流)误差。
4.1.2模拟乘法器的传输特性 模拟乘法器的传输特性
模拟乘法器有两个独立的输入量X和Y,输出量Z与X、Y之间的传输特性既 可以用式(4.1.1)、(4.1.2)表示,也可以用四象限输出特性和平方律输出特性 来描述。
4.1.2.1 四象限输出特性
当模拟乘法器两个输入信号中,有一个为恒定的直流电压E,根据式 (4.1.2)得到 Z=(KE)X (4.1.3) (4.1.4)
二象限乘法器——如果其中一个输入电压极性可正、可负,而另一个输入电压极 性只能取单一极性(即只能是正或只能是负)。 四象限乘法器——如果两输入电压极性均可正、可负。 特别注意:输入电压的极性选取是根据电路来决定,而不是数学上正负的任意 选取。 两个单象限乘法器可构成一个二象限乘法器;两个二象限乘法器则可构成一个 四象限乘法器。
②此简单乘法器输出电压中存在非相乘项;而且要求≥VBE,只能实现二象限相乘;
③恒流源管的温漂并没有进行补偿。因而在集成模拟乘法器中较少应用。
在此基础上发展而成的双平衡模拟乘法器则应用极其广泛。
4.2.1.2 双平衡模拟乘法器 四象限 双平衡模拟乘法器(四象限 四象限)
图4.2.3所示为双平衡模拟乘法器,又称吉尔伯特(Gilbert)乘法器单元电路,是一 种四象限模拟乘法器。六个双极型三极管分别组 = VT ln I S1
和
v0 = KvD 2 xvy
v
iD 2 = VT ln IS2
由此可得线性双平衡模拟乘法器的输出电压为 其中相乘增益K为
v 0 = Kv x v y
2 RC K= (V −1 ) I OX R X RY
iod = 2 vxv y I OX R X RY
v 0 (t ) = Kv x (t )v y (t )
或 Z=KXY
(4.1.1) (4.12)
式中:K[ ]——相乘增益,其数值取决于乘法器的电路参数。
图4.1.1模拟乘法器符号
图4.1.2 模拟乘法器的工作象限
4.1.1、模拟乘法器的工作象限 、 根据模拟乘法器两输入电压X、Y的极性,乘法器有四个工作象限(又称区域),如 图4.1.2所示。当X>0、Y>0时,乘法器工作于第I象限; 当X>0、Y<0时,乘法器工作于第IV象限,其它按此类推。 单象限乘法器——如果两输入电压都只能取同一极性(同为正或同为负)时,乘法器 才能工作。
或 Z=(KE)Y
上述关系称为理想模拟乘法器四象限输出特性,其曲线如图4.1.3所示。 由图可知,模拟乘法器输入、输出电压的极性关系满足数学符号运算规则; 有一个输入电压为零时,模拟乘法器输出电压亦为零;有一个输入电压为 非零的直流电压正时,模拟乘法器相当于一个增益为Av=KE的放大器。
图4-1-3 理想模拟乘法器四象限输出特性
输出失调电压一般可通过调节X通道、Y通道输入端和乘法器电路输出端的外设补偿网络进 行调零。
(2)线性馈通误差电压ZOX和ZOY X通道线性馈通误差电压ZOX为
Z OX
Y通道线性馈通误差电压ZOY为
X ≠0 Y =0
= ± KXYOS
Z OY
X =0 Y ≠0 ≠0
= ± KX OS Y
线性馈通电压可通过通道输入端的外设补偿网络进行调零。 (3)增益误差电压Zok 相乘增益误差引起的输出误差电压称为增益误差电压Zok,即 Zok=±△KXY 一般通过调整恒流源IOX的偏置电阻,使增益误差达到最小值,以减小增益误差电压。
4.1.3、模拟乘法器的线性与非线性性质 、
4.1.3.1、模拟乘法器的非线性性质 模拟乘法器是一种非线性器件,一般情况下,它体现出非线性 特性。
例1:两输入信号为X=Y=VmCosωt时,则输出电压为
2 Z = KXY = KVm cos 2 ωt =
1 ` 1 2 2 KVm + KVm cos 2ωt 2 2
v0
输入信号的线性范围很小(<<2VT),而且K与温度有关。
双平衡模拟乘法器的频率特性较好,且使用灵活,广泛地应用于集成乘法器中 美国产品——MCl496/1596、pA796、LMl496/1596; 国内产品——CFl496/1596、XFC一1596等。 图4.2.4所示为XFC一1596内部电路。负载电阻Rc(3.9kΩ)、负反馈电阻Ry、偏置电阻 R5(6.8kΩ)等采用外接形式。 XFC一1596广泛应用于通信、雷达、仪器仪表及频率变换电路中。
图4-1-4 理想模拟乘法器平方律输出特性
4.1.2.2 平方律输出特性
当模拟乘法器两个输入电压相同,即X=Y,则其输出电压为 Z=KX2=KY2 (4.1.5) 当模拟乘法器两个输入电压幅度相等而极性相反,则其输出电压为 Z=一KX2=一KY2 (4.1.6) 上述关系称为理想模拟乘法器的平方律输出特性,其曲线如图4.1.4所示。 由图可知,是两条抛物线。
v BE iC ≈ i E ≈ I ES exp( ) VT
(注意VT=26mV——温度的电压当量)
可得差分对管电流与I0的关系为
I 0 ≈ iC 1 + i C 2
iC 1 ≈
vx − v BE ≈ iC1 [1 + exp( )] = iC 2 [1 + exp( )] VT VT
iC 2 ≈ I0 v [1 − th( x ) ] 2 2VT
我们可以在乘法器后面连接选频电路来构成混频电路
例3:X、Y均为直流电压时: 当X =Y=E,则Z1=KE12 (4.1.8) 当X =Y=E,则Z2=KE22 (4.1.9) 当X =Y=E1 + E2, 则Z=K(E1十E2)2≠Z1+Z2 (4.1.10) 可见,一般情况下,线性迭加原理不适用于模拟乘法器。
4.1.3.2、模拟乘法器的线性性质 、 在一定条件下,模拟乘法器又体现出线性特性。 例如,X=E(恒定直流电压)、Y=+ (交流电压)时,则输出电压Z为 Z=KXY =KE(+)=KE+KE (4.1.11) 可见,输出电压中,不含新的频率分量,而且符合线性迭加原理,故此时,模 拟乘法器亦可作线性器件使用。
(4.1.7)
可见,输出电压中含有新产生的频率分量。 我们在乘法器后面串接一个隔直电容即可以构成倍频电路。
例2:X= Vm1Cosω1t ,Y=Vm2Cosω2t,则输出电压为