系统辨识第三章(随机逼近法)讲义(NJUST)
系统辨识 第三章 状态估计—Kalman滤波方法

定理 若 z 的协方差阵 Rzz 有逆 则 z 对 x 的线性无偏最小方差估计唯一地表示为 −1 ˆ = E ( x | z ) = m x + Rxz Rzz ( z − mz ) x (3.1.16) 且误差协方差阵为 −1 ~~ T ˆ ˆ T R~ x = cov{x x } = cov{( x − x )( x − x ) } = R xx − R xz R zz R zx (3.1.17)E[T * (Y ) − x] ≤ E[T (Y ) − x] 2 则称 T (Y ) 为最小方差估计 定理 设 x 和 Y 是两个联合分布的随机向量 期望值 ˆ = E[ x | y ] = ∫ x p( x | y )dx x
−∞ ∞
ˆ 就是 x 的条件 则 x 的最小方差估计 x (3.1.8)
估计值能够落在真值的任一
定义 如果对于任意实数 ε > 0 式 3.1.1 ˆ (N ) − x > ε} = 0 lim P{ x
N →∞
得到的估计量依概率收敛于真值
即 (3.1.4)
则称该估计为一致估计 充分估计 ˆ 包含了样本 { y (1), y (2),L , y ( N )} 关于 x 的全部信息 则称 x ˆ (N ) 为 x 的 如果 x 充分估计
−1
−1
−1
结合式
(3.1.18)
定理得证
5 定理 如果 z = { y (1),L , y ( N )} 是 Y 的一组子样 且 y (i ), i = 1, L , N 对 x 的线性无偏最小方差估计为 ˆ = E{x | z} = ∑ E ( x | y (i )) − ( N − 1)m x x
证明 假定 f ( y ) 为 x 的一个估计 其中 y 为随机向量 Y 的某一实现 则估计误差为 ~ x = x − f ( y) 且 E[ ~ x~ x T ] = E{[ x − f ( y )][ x − f ( y )]T = E{[ x − E ( x | y ) + E ( x | y ) − f ( y )] • [ x − E ( x | y ) + E ( x | y ) − f ( y )]T } = E{[ x − E ( x | y )][ x − [ x − E ( x | y )]T } + E{[ E ( x | y ) − f ( y )][ E ( x | y ) − f ( y )]T } + E{[ x − E ( x | y )][ E ( x | y ) − f ( y )]T } + E{[ E ( x | y ) − f ( y )][ x − E ( x | y )]T } 下面说明上式的最后两项为零 E{[ x − E ( x | y )][ E ( x | y ) − f ( y )]T }
《系统辨识》课件
模型结构确定后,其中未知部分就要通过观测数据进
行估计。通常未知部分是以未知参数出现,故辨识工
作就成了参数估计。
参数估计的要求就是要辨识出来的模型与实际过程在
某种意义下最“接近”。
所以必须有个准则衡量。
4、模型验证
一个模型辨出来后,是否可靠必须进行多次验证。
通常一个模型用一套数据进行辨识,然后用另一套数
建立数学模型来预报。
4
第一章 概 述
2. 用于分析实际系统 工程上在分析一个新系统时,通常先进行数学仿真, 仿真的前提必须有数学模型。
3. 为了设计控制系统 目前,对被控系统的控制器的设计方法的选取,以及如 何进行具体的控制结构和参数的设计都广泛依赖于对 被控系统的理解及所建立的被控系统数学模型。
t2 t1
28
t1
y(t1)1e T
y1
y(t2)1et2T y2
第二章 过渡响应法和频率响应法
y(t)
t2 t1 y ( )
t
两边同取对数得:
t1 T
t2 T
n[1 n[1
y (t1)] y (t 2 )]
T t2n[nn1[[11 yyy(t((1ttt)112]))]] tn1t[1n1[n1[1y yy(t(2t)(2t])2])]
17
常用的模型类: 参数的 或 非参数的 线性的 或 非线性的 连续的 或 离散的 确定的 或 随机的 I/O的 或 状态的 时变的 或 定常(时不变)的
集中参数的 或 分布参数的 频率域的 或 时间域的 等等。
第一章 概 述
18
第一章 概 述
根据系统的空间、时间的离散化情况,模型可分为 三类:
由
t
y(t) 1e T
201110第三讲系统辨识建模法课件

19
系统辨识的基本方法和步骤
系统辨识中常用的误差准则
辨识有3个要素---数据、模型类和准则。辨识就是按 照一个准则在一组模型类中选择一个与数据拟合得最好的模 型。
持续激励:输入信号必须充分激励系统的所有模态;
输入信号的选择应能使给定问题的辨识模型精度最高。
在具体工程应用中,选择输入信号还应考虑以下因素: (1)输入信号的功率或幅值不宜过大,以免使系统工作 在非线性区,但也不应过小,以致信噪比太小,直接影响 辨识精度; (2)输入信号对系统的“净扰动”要小,即应使正负向 扰动机会几乎均等; (3)工程上要便于实现,成本25 低。
理想阶跃信号
理想阶跃信号:实际上阶跃信号具有上升空间成为带斜坡的阶跃 信号,数学上定义的阶跃信号上升空间为零,称为理想阶跃信号。
ut
0,t 1,t
0 0
理想阶跃信号的频谱:
Ujj1
幅频: 如图所示
U(j) 1( / ),, 00
2 带斜坡的阶跃信号
t/, t
x1(t)
1,
t
带斜坡的阶跃信号
9
(3)系统设计和控制 在工程设计中,必须掌握系统中所包括的所有部件的特性或者子
系统的特性,一项完善的设计,必须使系统各部件的特性与系统的总 体设计要求(如产量指标、误差、稳定性、安全性和可靠性等)相适 应。为此,需要建立数学模型,在设计中分析、考察系统各部分的特 性以及各部分之间的相互作用和它们对总体系统特性的影响。
辨识问题可以归结为用一个模型来表示客观系统(或将要 构造的系统)本质特征的一种演算,并用这个模型把对客观系统 的理解表示成有用的形式。
《系统辨识第三章》PPT课件
h
10
三、最小二乘估计 的求法
⒈ ˆLS 解法
ˆLS
由最小二乘辨识定义,求 的:
ˆLS
必要条件:
J ()
0
ˆLS
充分条件:
2 J ()
0 及
2
ˆ LS
J ()
0
ˆLS
Y
J()T ( Y )T(Y ) Y T Y T T Y Y T T T
h
11
由 于是得:
由充分条件:
2J() 2
2T0
与参数向量 无关。 θ
h
12
⒉ 解ˆL的S 唯一性
因 阵行数大于列数,T为 2n2方n阵。若 存 (T)1
在,则 T必ˆLS正定;反之,若 T 正定,则逆 必 (T)1
存在。因此, 必有解,且满足充分条件
2 J ( ) 2
0
与 无关,所以ˆLS解唯一。
h
13
⒊最小二乘法所需信息量与持续激励条件
☆ 3-6 适应最小二乘法
h
3
第三章 最小二乘辨识
用来进行系统参数辨识的最小二乘法,是一种经典的数据处理方法,最早的应用可追 溯到18世纪,高斯为了提高天体运动观测的准确性,曾应用了最小二乘法。
本章将介绍一般最小二乘法、加权最小二乘法、递推最小二乘法以及广义最小二乘法 等内容。
由于最小二乘法比较简单实用,而且又可与其他辨识方法相组合,因此最小二乘辨识 是一种基本的、重要的辨识方法。
表示为:
Y(N) Y Ub a(N,)
bn0
(N)(N, )
h
8
Y(N) Y Ub a(N,)
(N)(N,)
其中: Y(N)( 测R 量(向N量n) ,1)1
模式识别第3章 近邻法

26
27
近邻法
重复剪辑近邻法
原始样本集(不同均矢和协方差阵的两类正态分布随机样本)28
近邻法
重复剪辑近邻法
第一次剪辑后留下的样本
29
近邻法
重复剪辑近邻法
第三次剪辑后留下的样本
36
近邻法
压缩近邻法
基本方法:
• 将样本集XN分为XS 和XG ,开始时XS 中只有一个样本, XG中为其余样本
• 考查XG 中每个样本,若用XS 可正确分类则保留,否则 移入XS
• 最后用XS作最近邻法的比较样本集。
37
近邻法
压缩近邻法
算法步骤(Condensing算法):
1. 设置两个存储器,分别为STORE和GRABBAG,将第一个样本放 入STORE中,把其他样本放入GRABBAG中;
i1
如果
则 x m
5
近邻法
最近邻决策规则—k-NN
k的取值选择很重要! 6
近邻法
最近邻决策规则—k-NN
特点: 思想简单,计算方便 需要存储所有样本,每次决策都要计算待识
别样本与全部训练样本之间的距离并进行比 较,存储量和计算量都很大
7
近邻法 例子:
最近邻决策规则—k-NN
8
近邻法
最近邻决策规则—k-NN
主要内容
第一章 第二章 第三章 第四章 第五章 第六章 第七章
绪论 非监督学习方法 近邻法 线性判别函数 人工神经网络 贝叶斯决策理论 模式识别应用
1
第三章 近邻法
• 最近邻决策规则 • 推广—K近邻决策规则 • 改进算法
系统辨识第3讲
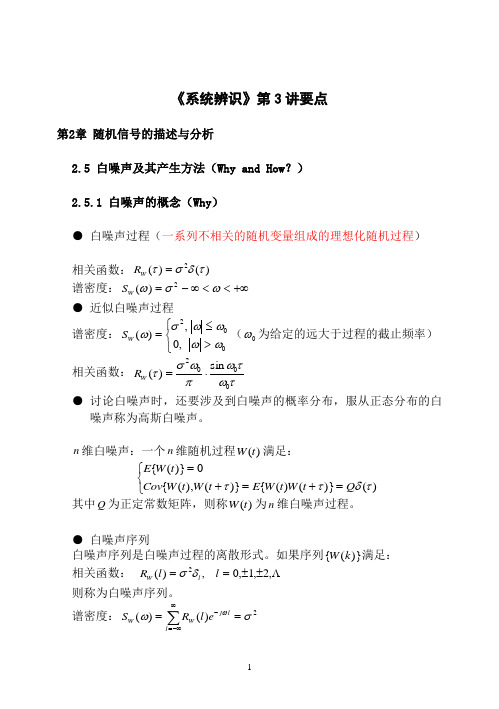
《系统辨识》第3讲要点第2章 随机信号的描述与分析2.5 白噪声及其产生方法(Why and How ?)2.5.1 白噪声的概念(Why )● 白噪声过程(一系列不相关的随机变量组成的理想化随机过程)相关函数:)()(2τδστ=W R 谱密度:+∞<<∞-=ωσω2)(W S● 近似白噪声过程谱密度:⎩⎨⎧>≤=002,0,)(ωωωωσωW S (0ω为给定的远大于过程的截止频率)相关函数:τωτωπωστ0002sin )(⋅=W R ● 讨论白噪声时,还要涉及到白噪声的概率分布,服从正态分布的白噪声称为高斯白噪声。
n 维白噪声:一个n 维随机过程)(t W 满足:⎩⎨⎧=+=+=)()}()({)}(),({0)}({τδττQ t W t W E t W t W Cov t W E 其中Q 为正定常数矩阵,则称)(t W 为n 维白噪声过程。
● 白噪声序列白噪声序列是白噪声过程的离散形式。
如果序列)}({k W 满足: 相关函数: ,2,1,0,)(2±±==l l R l W δσ 则称为白噪声序列。
谱密度:2)()(σωω==∑∞-∞=-l l j WW e l RS2.5.2 表示定理与成形滤波器● 表示定理(某些特定的有色噪声可以由白噪声输入线性系统而生成) 设平稳噪声序列)}({k e 的谱密度)(ωe S 是ω的实函数,或是ωcos 的有理函数,那么必定存在一个渐近稳定的线性环节,使得如果环节的输入是白噪声序列,则环节的输出是谱密度为)(ωe S 的平稳噪声序列)}({k e 。
● 成形滤波器表示定理中所涉及到的线性环节称为成型滤波器。
白噪声)(k w)(k e可以证明:如果)}({k e 的谱密度)(ωe S 是ωcos 的有理函数,那么一定存在一个成型滤波器,它的脉冲传递函数为:d d c c n n n n z d z d z c z c z C z D z H -------++++++== 111111111)()()( 且)(),(11--z D z C 的根都在z 平面的单位圆内。
《系统辨识第三章》PPT课件

(N+1)时刻的估计输出值
之差。
第五十五页,共161页。
55
递推公式基本形成,但其中涉及矩阵求逆运算,即 为了避免求逆运算,由矩阵反演公式: 令
第五十六页,共161页。
56
最后,加权最小二乘递推算法归纳如下:
在上列式中,令
,得最小二乘递推算法。
第五十七页,共161页。
57
二、初值的确定
进行递推估计,必须设定初值
由于最小二乘法比较简单实用,而且又可与其他辨识
方法相组合,因此最小二乘辨识是一种基本的、重要的辨 识方法。
第四页,共161页。
4
§3-1 最小二乘法
一、最小二乘辨识方程
用最小二乘辨识技术辨识系统的数字模型的原理方 块图如下:
被辨识系统
测量装置
D/A
A/D
计算机
(最小二乘辨识 算法)
数学模型
第五页,共161页。
但由于简单实用,仍不失为一种好的参数估计方法,
为了克服最小二乘法的不足,在最小二乘法的基础
上,发展了辅助变量法和广义最小二乘法,但计算
量较大。
第三十一页,共161页。
31
例3-2 设有下列二阶系统
输入序列 为振幅等于1的伪随机二位式序列, 噪声 为零均值且方差为 可调正态 分布随机数序列。试说明最小二乘估计精度。
5
被辨识系统
测量装置
D/A
A/D
计算机
(最小二乘辨识算法)
数学模型
设被辨识系统的脉冲传递函数为
第六页,共161页。
6
则当存在观测误差 及建模误差时,相应的差分方程:
式中, 称为方程误差, 为模型参数向量;若令 代 表真实参数向量,显然有
系统辨识 第3章 系统辨识输入信号

3.1 准备知识——随机过程
3.2 白噪声及其产生方法 3.3 M序列的产生及其性质
3.4 逆重复M序列的产生及其性质
3.5 辨识输入信号的要求
噪声 u(k)
对象
y(k)
测量噪声
测量
输入测量值
测量
输出测量值
测量噪声
系统辨识
辨识三要素: 数据、模型和准则
3.1 准备知识—随机过程
2
X - E{ X }
2
-
x - x
2
p( x , t )dx
( X (t ))
方差的性质
2
——标准差函数
2
( X ) E X
EX
2
a为常数时
2 (aX ) a 2 2 ( X )
2 ( X a) 2 ( X )
x
p ( , t ) d
pk P{X (t ) xk }
F ( x, t ) pk
xk x
1.2 随机变量及其分布
(2)二维随机变量的联合分布函数:
二维随机过程{X(t),Y(t)}在任意时刻t均可看作二维随机变量 连续随机变量 联合概率密度函数
p( x, y, t ) P X (t ) x, Y (t ) y
1.2 随机变量及其分布
随机事件的概率 ==> 随机变量的取值规律
(1)一维随机变量的分布函数: 随机过程{X(t)}在任意时刻t均可看作随机变量 连续随机变量 概率密度函数
p(, t ) P{X (t ) }
概率分布函数 F ( x, t ) P X (t ) x 离散随机变量 概率分布律 概率分布函数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{ } J
(θ)
=
1 2
E
⎡⎣e2
(k
)⎤⎦
=
1 2
E
⎡⎣ y(k) − ψT (k)θ ⎤⎦2
则有q(θ, Ωk ) = ψ(k) ⎡⎣ y(k) − ψT (k)θ ⎤⎦
{ } J (θ) = 1 E 2
⎡⎣z(k + n) − ψT (k + n)θ ⎤⎦2
利用随机逼近原理,可得参数估计的随机逼近
算法为
θˆ(k + n) = θˆ(k −1) + ρ(l)ψ(k + n)[z(k + n) − ψT (k + n)θˆ(k −1)]
k = 1, n + 2,2n + 3,"
2
3.2 随机逼近参数估计方法
2)随机逼近法参数估计 根据随机逼近原理,有
( ) θˆ(k) = θˆ(k −1) + ρ(k)q θˆ(k −1), Ωk
式中收敛因子ρ(k) ,必须满足收敛条件。
如果准则函数 J (θ)取为
{ } J
(θ)
=
1 2
E
⎡⎣e2
(k ) ⎤⎦
=
1 2
E
⎡⎣ y(k) − ψT (k)θ ⎤⎦2
Wolfowitz 给出了求回归函数ϕ(x)极值的迭代算法。
x(k +1) = x(k) − ρ(k) dy dx x(k )
如果式中收敛因子 ρ(k) 满足 Robbins-Monro 算法的条件(*),则 Keifer-Wolfowitz 算法是收敛 的,即 x(k)的收敛值将使ϕ(x(k))达到极值。
15
两两不相关。
3.2 随机逼近参数估计方法
4)差分方程的参数辨识
z(k) = ψT (k)θ + e(k)
式中
⎧ ψT (k)
⎪ ⎨
θ
=
[a1
⎪⎩e(k) =
= [−z(k −1)" − z(k − na )
" ana b1 " bnb ]T A(q−1)v(k) − B(q−1)s(k) +
ε
x(k (k )
例 已知系统差分方程为
y(k) = −0.18 y(k −1) + 0.784 y(k − 2) − 0.656 y(k − 3) + ε (k) z(k) = y(k) + v(k)
式中,ε (k)和v(k) 分别是均值为 0、方差为 1 和 0.25 的不相关随机噪声。采用随机逼近法和修正的随机 逼近法估计参数。(见教材 P144)
⎡σ ⎢
2 v
I
na
⎢⎣ 0
σ
0 I2
s nb
⎤ ⎥ θˆ(k ⎥⎦
−1)⎫⎪⎬, ⎪⎭
k = 1,n + 2,2n + 3,"
并证明了该算法在均方意义下是一致收敛的,即
{ } lim E
k →∞
⎡⎣θ0 − θˆ(k + n)⎤⎦T ⎡⎣θ0 − θˆ(k + n)⎤⎦
=0
19
3.2 随机逼近参数估计方法 4)差分方程的参数辨识
7
3.1 随机逼近原理
1) Robbins-Monro算法
Wolfowitz 还进一步证明,若ϕ(x)满足下列条件:
(1)
∞
∫−∞
[
y
−
ϕ
(
x)
]2
dp(
y
|
x)
<
∞
;
(2) ϕ(x) < c + d x , − ∞ < x < ∞ ;
(3)当 x < x0 时,ϕ(x) < a, 当 x > x0 时,ϕ(x) > a ; (4)对满足关系式0 < δ1 < δ2 < ∞的任意δ1和δ2 ,存 在 inf ϕ(x) − a > 0
Keifer-Wolfowitz 算法可直接推广到多维的
情况。
10
3.1 随机逼近原理
2)Keifer-Wolfowitz算法 考虑标量函数 J (θ)的极值问题。
如果θ 在θˆ 上使 J (θˆ) 为极值,则求θˆ 的迭代算法 为:
θˆ(k + 1) = θˆ(k) − ρ(k) ∂J (θ) ∂θ θˆ (k )
=0
可求出使 J (θ) = min 的θˆ 。
但是,在 e(k) 统计特性未知情况下,上式无法 求解。
3
3.1 随机逼近原理
如果用平均值来近似数学期望
{ } ∑ 则有 1 N N k=1
ψ(k) ⎣⎡ y(k) − ψT (k )θˆ⎦⎤
=0
∑ ∑ 可得θˆ
=
⎡ ⎢⎣
N k =1
ψ
(k
)ψ
T
(k
⎤ −1 )⎥⎦
,
则参数估计的迭代方程可写为
θˆ(k) = θˆ(k −1) + ρ(k)ψ(k) ⎡⎣ y(k) − ψT (k)θˆ(k −1)⎤⎦
——随机逼近法参数估计的基本公式。 13
3.2 随机逼近参数估计方法
3)收敛因子的选取
θˆ(k) = θˆ(k −1) + ρ(k)ψ(k) ⎡⎣ y(k) − ψT (k)θˆ(k −1)⎤⎦ 一般情况下, ρ(k)随着k 的增加,需要有足够的
系统辨识
第三章 随机逼近法
主讲教师:郭毓 联系方式:025-84315872-306(o)
南京理工大学自动化学院
随机逼近法 ——一种应用广泛的参数估计方法
3.1 随机逼近原理 考虑模型参数辨识问题
y(k) = ψT (k)θ + e(k) 其中,e(k) 是均值为0的噪声。
{ } 选取准则函数
J (θ)
而 Keifer 和 Wolfowitz 用ϕ(x) = E{y | x} = α 来确 定回归函数ϕ ( x) 的极值。
如果回归函数ϕ(x) 存在极值,则ϕ(x) 取极值处 的 x 使的 dϕ(x) = 0 。
dx
9
3.1 随机逼近原理
2)Keifer-Wolfowitz算法 根 据 Robbins-Monro 算 法 , Keifer 和
∂J (θ) ∂θ θˆ(k −1)
其中, R(k) 是 Hessian 矩阵在θˆ(k −1)点上的近似形
式,在特定的准则函数下,它可以再用随机逼近法
来确定。
23
3.3 随机牛顿法
2)随机牛顿法(RNA)
利用随机牛顿法进行方程 y(k) = ψT (k)θ + e(k) 参 数的辨识。
假设取准则函数为
B(q−1) = b1q−1 + " + bnbq−nb ,
ε
(k
)
是均值为零,方差为σ
2 ε
的不相关噪声;
输入和输出数据对应的测量值为
⎧x(k) = u(k) + s(k)
⎨ ⎩
z(k)
=
y(k)
+
v(k)
式中 s(k )
和v(k)
分别是均值为
0、方差为σ
2 s
和σ
2 v
的不
相关随机噪声,且ε (k) 、s(k) 、v(k) 和u(k) 在统计上
17
3.2 随机逼近参数估计方法
4)差分方程的参数辨识 为了避免误差累计,算法中采用的数据必须是
互不相关的,或数据中所含的噪声e(k) 统计独立。 由e(k) 所具有的噪声特性知,如果每隔(n +1) 时
刻递推计算一次,则可满足e(k) 统计独立的要求。
收敛因子 ρ(l)必须满足收敛性条件,自变量l 可 取l = k −1或l = (k −1) / (n +1) 。
=
1 2
E
⎡⎣e2 (k)⎤⎦
=
1 2
E
⎡⎣ y(k) − ψT (k )θ ⎤⎦2
求 θˆ ,使 J (θ) = min 。
2
3.1 随机逼近原理
在{e(k )} 为零均值的独立随机序列的情况下,只 需求 J (θ)的一阶负梯度并令其为 0
{ } 即:⎡⎢⎣−
∂J (θ) ∂θ
⎤T ⎥⎦
=
E
ψ(k ) ⎡⎣ y(k ) − ψT (k)θ⎤⎦
1)问题的提出 为了加快收敛速度,可采用牛顿算法:
θˆ(k J (θ)
⎢ ⎣
∂θ 2
⎤ −1 ⎥ ⎦
∂J (θ) ∂θ
θˆ (k −1)
随机牛顿逼近法实质上是 沿着准则函数的二阶负梯 度方向搜索极小值点
式中 ∂2J (θ) ——Hessian 矩阵,它是对称阵,在递推
∂θ 2
记为ϕ(x) E{y | x},它是 x 的函数——回归函数。
假设:对于给定的α ,方程ϕ(x) = E{y | x} = α 有唯一解。
当ϕ ( x) 的函数形式和条件概率密度均未知时,
方程求解困难 ,可用随机逼近法求解。☺
5
3.1 随机逼近原理
随机逼近法就是利用变量 x1, x2,",及对应的随 机变量 y(x1), y(x2),",通过迭代计算,逐步逼近方程 式的解。
一般地, ρ(l) 随着 k 的增加要有足够的下降速 度,但 ρ(l) 又不能下降得太快,否则被处理的数据
18
总量太少。
3
4.2 随机逼近参数估计方法
4)差分方程的参数辨识 注意:利用随机逼近方法获得的参数估计是有偏的
(证明略) 相良节夫将偏差引入算法,给出了一种修正的随
机逼近算法
{ θˆ(k + n) = θˆ(k −1) + ρ (l) ψ(k + n)[z(k + n) − ψT (k + n)θˆ(k −1)] +