浅谈磁电式与霍尔式速度传感器在汽车上的区别
论磁电式转速传感器在汽车中的应用

《装备维修技术》2021年第13期论磁电式转速传感器在汽车中的应用彭溢润(航空工业苏州长风航空电子有限公司,江苏 苏州 215151)摘 要:在现当代的社会当中,汽车已经是人们必不可少的一个重要交通工具,在汽车中关于转速传感器的应用设计这方面我们进行分析,汽车用转速传感器是去检测汽车发动机转速的,转速传感器应用的是磁感应原理,在检测过程当中并不需要接触,使用的过程当中,转速传感器发出正玄信号箱发动机,从而去判断汽车当前的曲轴位置和转速,在检测的过程当中,主要是通过信号轮去旋转切到磁力线,在这个过程当中,芯片会感受到周围磁场的变化,从而能够反映出信号,这个信号通过发动机内部的调节所输出来的是方波形式的信号,这种信号发出的精确度是非常高的,满足于汽车发动机的精确度需求,使得可燃气体能够更充分的燃烧,从而达到尾气排放的标准,能够更好地发展。
关键词:磁感应;转速;磁力线在目前的发展过程当中,关于磁电式转速传感器已经很好地应用到汽车的装备中,而我们目前需要研究的就是是否这种传感器能够让汽车更好的运行,本篇文章将分析其中的相关参数,确定它是否符合汽车的发展,为汽车的发展做出良好的奠基作用,满足汽车发动机的各项需求,才能够在未来发展的更好,对于目前来说,汽车已经是人类必不可少的一项重要交通工具,所以我们必须要对它的各项性能进行更好的了解,保证他的安全运行,对于本篇文章来说,我们要需说的是关于磁电式转速传感器在汽车中的应用。
1 产品的结构磁电式转速传感器,它的组成结构主要是通过在它的内部放一个永磁体,在这个部位的上下方分别放一根导,分别和南极和北极连接,在一侧的外面放有感应的线圈,线圈两端有输出的端子,这个传感器工作的特点是将它固定在一个速度转动,因为他里面装置着永磁体,其中包含着导磁铁心,他的外面会有一定数量的线圈,其中速度齿轮是由铁磁这种材料做成的,齿轮在转动的时候,传感器通过自己的探头对应出来齿轮的转动是连续不断变化的,出现这种情况的原因是由于传感器内部中存在着一定的磁场,这种磁场会经过探头的表面向周围散发出去,传感器的探头靠近齿轮的时候,就会在这个过程中形成一个磁路,当它们之间通过磁通量的时候,并且达到了一定的数量,就会由于其中的间隙不同使得他们之间的词组发生相应的变化,所以在旋转的过程当中,它的磁通量也是变化着的,传感器周围是由线圈围绕的变化的过程中,相应的就会出现感应电压,在计算过程当中,我们会根据公式去计算相应的数据进行分析。
磁电和霍尔
二、主要特性参数 (1)输入电阻R i 恒流源作为激励源的原因:霍尔 元件两激励电流端的直流电阻称为输入电阻。它的 数值从几十欧到几百欧,视不同型号的元件而定。 温度升高,输入电阻变小,从而使输入电流Iab变大, 最终引起霍尔电动势变大。使用恒流源可以稳定霍 尔原件的激励电流。 (2)最大激励电流Im 激励电流增大,霍尔元件的 功耗增大,元件的温度升高,从而引起霍尔电动势 的温漂增大,因此每种型号的元件均规定了相应的 最大激励电流,它的数值从几毫安至十几毫安。 提问:霍尔原件的最大激励电流Im 为宜。 A.0mA B.±0.1 mA C.±10mA D.100mA
当温度变化时,补偿的稳定性要好些
返
回
上一页
下一页
图5-23 不等位电势的补偿电路
8.3、 霍尔式传感器的应用
优点:
结构简单,体积小,重量轻,频带宽,动态特性好和寿命长
应用:
电磁测量:测量恒定的或交变的磁感应强度、有功功 率、无功功率、相位、电能等参数; 自动检测系统:多用于位移、压力的测量。
返
回
(3)灵敏度KH
在磁场垂直于霍尔元件的测试条件下, KH EH /(BI ) 单位为:mA/(mA.T) (4)最大磁感应强度Bm 磁感应强度超过Bm时, 霍尔电动势的非线性误差将明显增大,Bm的数 值一般小于零点几特斯拉。 提问:为保证测量精度,图8-3中的线性霍尔IC的 磁感应强度不宜超过 为宜。 A.0T B.±0.10T C.±0.15T D.±100Gs
变磁阻式磁电转速传感器
线圈3和磁铁 5静止不动, 测量齿轮2 (导磁材料制 成)与旋转体 1上一起转动。
2-齿轮
3-线圈
4-软铁
霍尔传感器在汽车上的应用共17页文档

对测速装置的要求是分辨能力强、高精度和尽可
能短的检测时间。发电机转速的检测方案可分成 两类:用测速发电机检测或用脉冲发生器检测。 测速发电机的工作原理是将转速转变为电压信号 ,它运行可靠,但体积大,精度低,且由于测量 值是模拟量,必须经过A/D转换后读入计算机。 脉冲发生器的工作原理是按发电机转速高低,每 转发出相应数目的脉冲信号。按要求选择或设计 脉冲发生器,能够实现高性能检测。
深圳市铭之光电子技术有限公司
传感器专家网sensorexpert
SS461C霍尔效应传感器应用:应用于速度传感器 用来检测汽车或者卡车曲轴的旋转情况
客户要求较高的灵敏度,SS461C霍尔效应传感 器,可满足客户需求,SS461C霍尔效应传感器 数字式电流沉输出,可提供高输出电流和高速响 应能力
深圳市铭之光电子技术有限公司
深圳市铭之光电子技术有限公司
传感器专家网sensorexpert
深圳市铭之光电子技术有限公司
传感器专家网sensorexpert
当霍尔元件用于数字信号时,例如曲轴位置传感
器、凸轮轴位置传感器或车速传感器,必须首先 改变电路。霍尔元件与微分放大器连接,微分放 大器与施密特触发器连接。在这种配置中。传感 器输出一个开或关的信号。在多数汽车电路中, 霍尔传感器是电流吸收器或者使信号电路接地。 要完成这项工作,需要一个NPN晶体管与施密特 触发器的输出连接。磁场穿过霍尔元件,一个触 发器轮上的叶片在磁场和霍尔元件之间通过。
多仍采用感应传感器来作速度传感器。
用感应传感器来做车轮速度传感器的缺点是:其输 出信号幅值随车速变化,在低于5km/h时,幅值极低 。其体积较大,灵敏度随空气隙变化等。但ITT Teves2019年就已宣称他们正在开发零频率响应 的车轮速度传感器,这种传感器中使用的就是前面
对比霍尔传感器与磁敏电阻的工作原理

一、霍尔传感器的工作原理1. 霍尔传感器是一种利用霍尔效应进行测量的传感器,霍尔效应是由美国物理学家爱德华·霍尔于1879年发现的一种物理效应。
2. 霍尔传感器是通过将电流传导材料置于磁场中,利用霍尔效应产生一个电压信号来检测磁场强度的传感器。
当传导材料中有电流通过时,磁场会使电子受到偏转,从而在传感器输出端产生一个电压信号。
3. 霍尔传感器的工作原理可以简单理解为磁场引起电子偏转产生电压信号,从而实现对磁场的检测。
二、磁敏电阻的工作原理1. 磁敏电阻是一种磁场敏感的电阻,其阻值会随着外加磁场的变化而发生变化。
2. 磁敏电阻的工作原理是基于磁阻效应,当磁敏电阻处于外加磁场中时,其晶格结构或磁性材料会发生变化,从而导致电阻值发生变化。
3. 一般来说,磁敏电阻是由氧化铁、氧化镍等磁性材料制成,当外加磁场改变了这些材料的磁矩方向时,电阻值会发生相应的变化。
4. 磁敏电阻的工作原理可简单理解为外加磁场改变磁性材料的磁矩方向,从而导致电阻值发生变化。
三、霍尔传感器与磁敏电阻的对比1. 原理差异:霍尔传感器是利用霍尔效应来测量磁场强度的传感器,而磁敏电阻是利用磁阻效应来测量外加磁场的变化的传感器。
2. 灵敏度:通常情况下,霍尔传感器的灵敏度要高于磁敏电阻,因为霍尔传感器是直接测量磁场强度,而磁敏电阻是间接测量外加磁场的变化。
3. 响应速度:由于霍尔传感器是通过电子受到磁场影响产生电压信号来检测磁场强度,因此其响应速度一般要快于磁敏电阻。
4. 成本:通常来说,磁敏电阻的制造成本要低于霍尔传感器,因为磁敏电阻一般采用的是一些常见的磁性材料,而霍尔传感器需要一定的电子元件来实现。
5. 应用范围:霍尔传感器和磁敏电阻在应用范围上略有不同,霍尔传感器适用于需要精确测量磁场强度的场合,而磁敏电阻适用于对外加磁场变化敏感的场合。
四、结论根据上述分析,霍尔传感器和磁敏电阻的工作原理、性能特点以及应用范围都有所不同。
第7章 磁电式传感器和霍尔传感器

Is
Ri
UL
则不考虑Ri的温度误差. RL UL UH Rs Ro RL
Ro Ro 0 (1 t ), Rs Rs 0 (1 t )
RL UL U H 0 (1 t ) () Ro 0 (1 t ) Rs 0 (1 t ) RL
I s , B一定, 故 U H U Ho (1 T )
任意情况都适用。13
②内阻温度系数δ 定义:温度变化1℃ 所对应的输入或输出电阻的相对变 化值,即
( Ri Ri 0 ) / Ri 0 ( RO RO 0 ) / RO 0 T T Ri Ri 0 (1 T )或RO RO 0 (1 T )
可见,δ是描述内阻温度误差大小的物理量。
R p 0 (1 t ) Ri 0 (1 t ) Rp0 温度没有变化时, t 0 U H 0 K H 0 I s B () R p 0 Ri 0 U H K H 0 (1 t ) R p 0 (1 t ) I s B ( )
Rp是外接电阻。
说明:
1.I已知,测出UH就可测出B(磁敏元件)。
4
2.灵敏度K H
(1) d小
1 RH / d的讨论 : ned
K H 大(故霍尔传感器做成薄片) Ri 和Ro大(但这2个值小些好, 参见霍尔元件特性)
(2) R 大 K 大。 H H
又
RH
金属 : 大, 很小 RH 小 绝缘体 : 大, 很小 RH 小 故一般选半导体做为霍尔传感器的材料。
电磁感应的磁场由变化电流提供,故需要外接电源。
2
7.2霍尔传感器 7.2.1 霍尔效应及霍尔元件 霍尔传感器是利用霍尔效应做成的传感器。 一. 霍尔效应 霍尔效应就是在磁场中放入通电的导体,那么在垂直于磁 场和电流的方向产生电动势的现象。 具体分析如下。
《传感器》习题答案

第一章 思考题与习题1、什么是传感器的静态特性?它有哪些性能指标?答:输入量为常量或变化很慢情况下,输出与输入两者之间的关系称为传感器的静态特性。
它的性能指标有:线性度、迟滞、重复性、灵敏度与灵敏度误差、分辨率与阈值、稳定性、温度稳定性、抗干扰稳定性和静态误差(静态测量不确定性或精度).2、传感器动特性取决于什么因素?答:传感器动特性取决于传感器的组成环节和输入量,对于不同的组成环节(接触环节、模拟环节、数字环节等)和不同形式的输入量(正弦、阶跃、脉冲等)其动特性和性能指标不同。
3、某传感器给定相对误差为2%FS ,满度值输出为50mV ,求可能出现的最大误差δ(以mV 计).当传感器使用在满刻度的1/2和1/8时计算可能产生的百分误差。
并由此说明使用传感器选择适当量程的重要性。
已知:FS %2=γ, mV y FS 50=;求:δm =?解:∵ %100⨯=FS my δγ; ∴ mV y FS m 1%100=⨯•=γδ若: FS FS y y 211= 则: %4%100251%1001=⨯=⨯=FS m y δγ 若: FS FS y y 812=则: %16%10025.61%1002=⨯=⨯=FS m y δγ 由此说明,在测量时一般被测量接近量程(一般为量程的2/3以上),测得的值误差小一些。
4、有一个传感器,其微分方程为x y dt dy 15.03/30=+,其中y 为输出电压(mV ),x 为输入温度(0C ),试求该传感器的时间常数τ和静态灵敏度k 。
已知:x y dt dy 15.03/30=+;求:τ=?,k =?解:将x y dt dy 15.03/30=+化为标准方程式为:x y dt dy 05.0/10=+与一阶传感器的标准方程:kx y dt dy =+τ 比较有: ⎩⎨⎧==)/(05.0)(100C mV k s τ 5、已知某二阶系统传感器的自振频率f 0=20k Hz ,阻尼比ξ=0.1,若要求传感器的输出幅值误差小于3%,试确定该传感器的工作频率范围。
磁电式传感器结构图分析 各种磁电式传感器介绍
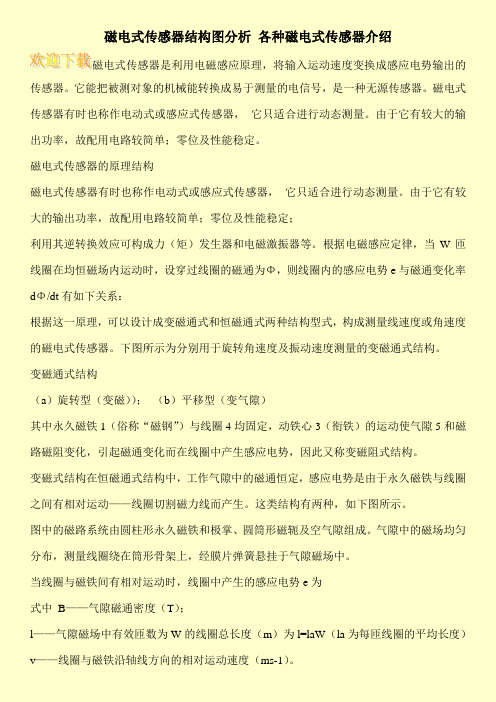
磁电式传感器结构图分析各种磁电式传感器介绍磁电式传感器是利用电磁感应原理,将输入运动速度变换成感应电势输出的传感器。
它能把被测对象的机械能转换成易于测量的电信号,是一种无源传感器。
磁电式传感器有时也称作电动式或感应式传感器,它只适合进行动态测量。
由于它有较大的输出功率,故配用电路较简单;零位及性能稳定。
磁电式传感器的原理结构磁电式传感器有时也称作电动式或感应式传感器,它只适合进行动态测量。
由于它有较大的输出功率,故配用电路较简单;零位及性能稳定;利用其逆转换效应可构成力(矩)发生器和电磁激振器等。
根据电磁感应定律,当W匝线圈在均恒磁场内运动时,设穿过线圈的磁通为Φ,则线圈内的感应电势e与磁通变化率dΦ/dt有如下关系:根据这一原理,可以设计成变磁通式和恒磁通式两种结构型式,构成测量线速度或角速度的磁电式传感器。
下图所示为分别用于旋转角速度及振动速度测量的变磁通式结构。
变磁通式结构(a)旋转型(变磁));(b)平移型(变气隙)其中永久磁铁1(俗称“磁钢”)与线圈4均固定,动铁心3(衔铁)的运动使气隙5和磁路磁阻变化,引起磁通变化而在线圈中产生感应电势,因此又称变磁阻式结构。
变磁式结构在恒磁通式结构中,工作气隙中的磁通恒定,感应电势是由于永久磁铁与线圈之间有相对运动——线圈切割磁力线而产生。
这类结构有两种,如下图所示。
图中的磁路系统由圆柱形永久磁铁和极掌、圆筒形磁轭及空气隙组成。
气隙中的磁场均匀分布,测量线圈绕在筒形骨架上,经膜片弹簧悬挂于气隙磁场中。
当线圈与磁铁间有相对运动时,线圈中产生的感应电势e为式中B——气隙磁通密度(T);l——气隙磁场中有效匝数为W的线圈总长度(m)为l=laW(la为每匝线圈的平均长度)v——线圈与磁铁沿轴线方向的相对运动速度(ms-1)。
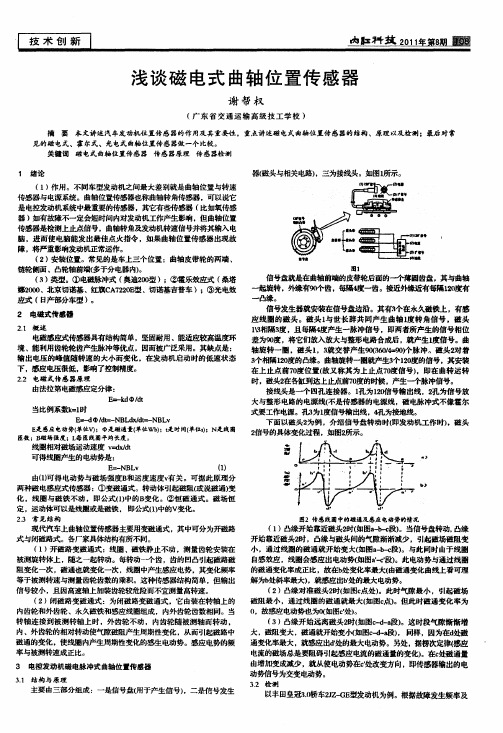
浅谈磁电式曲轴位置传感器
3 常见三种类型的位置传感器的比较 . 3
目前各车型中常见 的三种 不同类型的位置传感器有磁 电式 、霍尔 式以及光电式传感器 。 () 1 传感器组成 。① 信号发生部件 ;他们 都需要一个信号发 生 器 。磁 电式的较 多使 用4 、1齿等的齿轮 。霍尔式 的较多使用 带小 齿 2 窗 口的转 盘 , 电式的较 多使 用带缝隙的转盘 。⑦信号接收部件 ;他 光 们都需要信 号接 收元件及相关 的信号处理电路来接收识别由信号发生 部件产生 的信号 。 () 2 两个信号 。他们工作的时候都需要检测到判缸( 或上止点信 号) 曲轴转 角( 和 曲轴轴速) 两个信号 。①检测判缸信号 。有些车型用独 立的一个 或两个 磁头来测 。如 日产 、丰 田、广州本 田公司的一些 车 型 ;有些车型是在外缘带齿的信 号转 子去掉一两个齿 ,以些产生宽信 号作为判缸信号。如富康轿 车 、桑塔纳20G i 0O s 、捷达G  ̄T 等 。② TG X 曲轴转角信号。有些车型信号盘有若干齿 ,再结合E U C 的一个数学运 算 ,得 出l 号 ,进而可运算 出曲转 具体位置或曲轴转速 。如丰 田 度信 上的N 信号转子上有2个齿 。当转子转一圈( E 4 曲轴转两 圈) ,感应线 时 圈感 应 出2个 交流 信 号 ,即 产生个 交流信 号 相 当于 曲轴 转 了3度 4 O ( O2= O。再 由E 蚺 7 / 3) 2 4 c 每个 交流信号平分3等 分 ,就得到 1 曲轴 0 度 转 角信 号 。富康 轿车上 的信号转 子上有6个齿 ,则每个 交流信号 为 O l度转角 ,由E U 2 C 平分 l等分 即得1 2 度信号。 有些车型 利用两个磁头再 由电路整合 产生l 度信号 。如 日产分公 司传感感 上有磁头 l 相隔3 ,且每 隔4 、 3 度 度产生一脉 冲信号 ,即两者 所产生的信号相位差为9度 , 它们放入放大与整形 电路合成后 .就 o 将 产生l 度信号。