哈工大DSP大作业
DSP大作业2
重叠相加法和重叠保留法对于很长序列和短序列进行卷积,可采用重叠相加法和重叠保留法进行快速实现。
课本上只是通过公式图形来讲解,十分抽象。
许多人对这两种方法产生混淆,不理解,不会应用,特别是重叠保留法。
下面就先给出基本原理,再用实例讲解分析。
设h(n)的点数为M,信号x(n)为很长的序列。
重叠相加法是将长序列x(n)分解为很多段,每段x i(n)长度为L,L和M数量级相同。
将每段x i(n)和h(n)补零到N点(N>=L+M-1),用圆周卷积得到每段线性卷积的值,相邻两段输出序列的重叠M-1值相加得到正确值。
重叠保留法也是将长序列x(n)分解为很多段x i(n),但是每相邻段重叠M-1值取值(对第一段采取前面补M-1个零值),使得每段长度为N点,做N点的x i(n)和h(n)圆周卷积,将每段输出结果前M-1值去掉,剩下的值连结起来就是正确值。
下面就举例说明它们的用法。
例题1:已知 x(n)=(n+1),05≤≤, h(n)={1,0,1},分别用重叠相n加法和重叠保留法求解x(n)*h(n)。
解:通过直接卷积可知x(n)*h(n)值为 {1 2 2 2 2 2 -5 -6}。
解法一:重叠相加法已知M=3,令L=4, 将x(n)分段,得:x1(n)={1 2 3 4 };x2(n)={5 6 0 0 };将每段做N=8的圆周卷积。
x1(n) ⑧ h(n) ={1 2 2 2 -3 -4 0 0 }x2(n) ⑧ h(n) ={5 6 -5 -6 0 0 0 0}则:y1=x1(n)* h(n)= {1 2 2 2 -3 -4}y2=x1(n)* h(n)= {5 6 -5 -6}将y1尾部和y2头部值重叠 M-1=2点相加,得到y(n)={1 2 2 2 2 2 -5 -6}。
与直接卷积x(n)*h(n)值比较,发现两值相等。
说明此法正确。
解法二:重叠保留法已知M=3, 将x(n) 重叠 M-1=2点分段,每段长度为4,得:x1(n)={0 0 1 2 };x2(n)={1 2 3 4 };x3(n)={3 4 5 6 };x4(n)={5 6 0 0 };将每段做N=4的圆周卷积,得:y1=x1(n) ④ h(n) ={-1 -2 1 2 };y2=x2(n) ④ h(n) ={-2 -2 2 2 };y3=x3(n) ④ h(n) ={-2 -2 2 2 };y4=x4(n) ④ h(n) ={5 6 -5 -6 };每段输出去掉前M-1点,将剩下的值连接起来,得到y(n)={1 2 2 2 2 2 -5 -6}。
dsp实验报告哈工大实验二异步串口通信实验

dsp实验报告哈工大实验二异步串口通信实验异步串口通信实验一. 实验目的1. 了解*****F2407A DSP 片内串行通信接口(SCI)的特点。
2. 学会设置SCI 接口进行通信。
3. 了解ICETEK-LF2407-A 板上对SCI 接口的驱动部分设计。
4. 学习设计异步通信程序。
二. 实验设备计算机,ICETEK-LF2407-EDU 实验箱(或ICETEK 仿真器+ICETEK-LF2407-A 系统板+相关连线及电源)。
三. 实验原理1. *****F2407A DSP 串行通信接口模块*****F240x 器件包括串行通信接口SCI 模块。
SCI 模块支持CPU 与其他使用标准格式的异步外设之间的数字通信。
SCI 接收器和发送器是双缓冲的,每一个都有它自己单独的使能和中断标志位。
两者都可以独立工作,或者在全双工的方式下同时工作。
2. ICETEK-LF2407-A 板异步串口设计由于DSP 内部包含了异步串行通信控制模块,所以在板上只需加上驱动电路部分即可。
驱动电路主要完成将SCI 输出的0-3.3V 电平转换成异步串口电平的工作。
转换电平的工作由MAX232 芯片完成,但由于它是5V 器件所以它同DSP 间的信号线必须有电平转换,此板采用的是74LS245。
3. 串行通信接口设置CPU 进行串行通信时可以采用两种方式,一种是轮询方式,即CPU 不断查询串口状态进行接收和发送,缺点是占用CPU 时间太多;另一种是中断方式,SCI 的接收和发送都可以产生中断信号,这样CPU 可以在完成其他一些工作的同时进行串行通信。
串行通信接口波特率计算,内部生成的串行时钟由系统时钟SYSCLK 频率和波特率选择寄存器决定。
串行通信接口使用16 位波特率选择寄存器,数据传输的速度可以被编程为***** 多种不同的方式。
不同通信模式下的串行通信接口异步波特率由下列方法决定:BRR=1―***** 时的串行通信接口异步波特率:SCI 异步波特率=SYSCLK/ [( BRR+1)*8]其中,BRR=SYSCLK/(SCI 异步波特率*8)-1;BRR=0 时的串行通信接口异步波特率:SCI 异步波特率=SYSCLK/16这里BRR 等于波特率选择寄存器的16 位值。
dsp作业(DOC)

TMS320C62xx一、DSP简介自1982年推出第一款DSP后,德州仪器公司(Texas Instrument简称TI)不断推陈出新、完善开发环境,以其雄厚的实力在业界得到50%左右的市场份额。
TI的DSP经过完善的测试出厂时,都是以TMS320为前缀。
在众多款型DSP中,TI把市场销量好和前景看好的DSP归为三大系列而大力推广,TI也称之为三个平台(Platform)。
TMS320C2000 平台,包含16位C24xx和32位C28xx的定点DSP。
C24xx系列市场销量很好,而对C28xx系列,TI认为很有市场潜力而大力推广。
C2000针对控制领域做了优化配置,集成了了众多的外设,适合逆变器、马达、机器人、数控机床、电力等应用领域。
由于C2000定位在控制领域,其包含了大量片内外设,如IO、SCI、SPI、CAN、A/D等等。
这样C2000既能作为快速微控制器(单片机)来控制对象,也能作为DSP来完成高速数字信号处理,DSP的高性能与通用微控制器的方便性紧密结合在一起,所以C2000也常被称为DSP控制器。
这里C2000采用的是与OMAP 不同的途径简化了主从式设计。
C2000系列(定点、控制器):C20X,F20X,F24X,F24XX,C28X,F28XX 该系列芯片具有大量外设资源,如:A/D、定时器、各种串口(同步和异步),WATCHDOG、CAN总线/PWM发生器、数字IO脚等。
是针对控制应用最佳化的DSP,在TI所有的DSP中,只有C2000有FLASH,也只有该系列有异步串口可以和PC 的UART相连。
3)C6000 系列:C62XX,C67XX,C64XX 该系列以高性能著称,最适合宽带网络和数字影像应用。
32bit,其中:C62XX和C64XX是定点系列,C67XX 是浮点系列。
该系列提供EMIF扩展存储器接口。
该系列只提供BGA封装,只能制作多层PCB。
且功耗较大。
TMS320C5000 平台,包含代码兼容的定点C54x和C55x。
DSP大作业-设计需求
数字信号处理大作业作业内容:在有线电话拨号时,电话机根据当前所拨号码的不同产生不同频率组的电路信号,从而被另一端的交换机所识别,根据每个顺序识别的号码进行预先定义好的线路交换操作。
拨号产生的信号即双音多频信号。
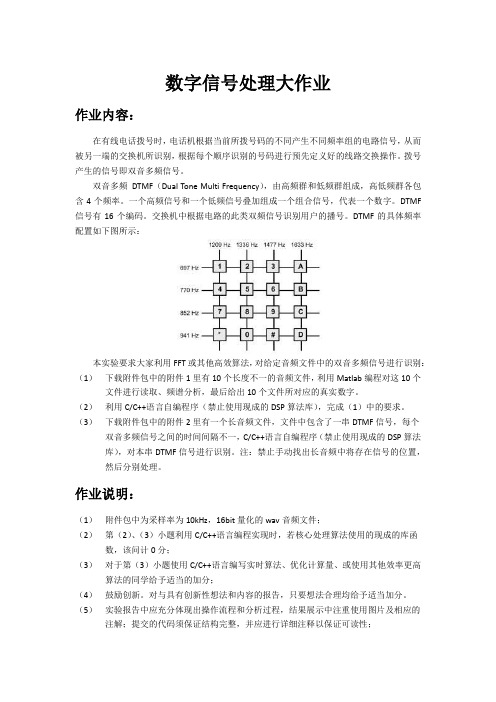
双音多频DTMF(Dual Tone Multi Frequency),由高频群和低频群组成,高低频群各包含4个频率。
一个高频信号和一个低频信号叠加组成一个组合信号,代表一个数字。
DTMF 信号有16个编码。
交换机中根据电路的此类双频信号识别用户的播号。
DTMF的具体频率配置如下图所示:本实验要求大家利用FFT或其他高效算法,对给定音频文件中的双音多频信号进行识别:(1)下载附件包中的附件1里有10个长度不一的音频文件,利用Matlab编程对这10个文件进行读取、频谱分析,最后给出10个文件所对应的真实数字。
(2)利用C/C++语言自编程序(禁止使用现成的DSP算法库),完成(1)中的要求。
(3)下载附件包中的附件2里有一个长音频文件,文件中包含了一串DTMF信号,每个双音多频信号之间的时间间隔不一,C/C++语言自编程序(禁止使用现成的DSP算法库),对本串DTMF信号进行识别。
注:禁止手动找出长音频中将存在信号的位置,然后分别处理。
作业说明:(1)附件包中为采样率为10kHz,16bit量化的wav音频文件;(2)第(2)、(3)小题利用C/C++语言编程实现时,若核心处理算法使用的现成的库函数,该问计0分;(3)对于第(3)小题使用C/C++语言编写实时算法、优化计算量、或使用其他效率更高算法的同学给予适当的加分;(4)鼓励创新。
对与具有创新性想法和内容的报告,只要想法合理均给予适当加分。
(5)实验报告中应充分体现出操作流程和分析过程,结果展示中注重使用图片及相应的注解;提交的代码须保证结构完整,并应进行详细注释以保证可读性;(6)作业应独立完成,杜绝抄袭。
实验报告或代码一经发现抄袭现象,无论抄袭者还是被抄者一律计0分。
DSP设计报告大作业(10313226)
JIANGSU UNIVERSITY OF TECHNOLOGYD S P技术及应用综合训练大作业班级 10通信2W 姓名王超学号 10313226 指导老师倪福银吴全玉2013年12月目录序言---------------------------------------------------------------2第一章 DSP理论技术概述----------------------------------------3 1.1 课程设计目的与意义 --------------------------------------------3 1.2 DSP芯片的选择与封装 ------------------------------------------4 1.3 DSP系统设计的方法和步骤---------------------------------------4 1.4 DSP前沿技术与应用---------------------------------------------6第二章 DSP硬件部分设计---------------------------------------10 2.1 硬件设计任务概述----------------------------------------------10 2.2 总体方案设计--------------------------------------------------11 2.3 模块电路原理图设计--------------------------------------------13 2.4 硬件设计小结--------------------------------------------------18第三章 DSP软件部分设计----------------------------------------18 3.1 液晶屏幕字块控制设计------------------------------------------18 3.1.1 软件设计任务概述---------------------------------------------19 3.1.2 程序设计思路与算法原理---------------------------------------19 3.1.3 软件设计流程-------------------------------------------------21 3.1.4 设计程序编写-------------------------------------------------21 3.1.5软件设计结果与小结-------------------------------------------37 第四章小结-----------------------------------------------------38 参考文献--------------------------------------------------------错误!未定义书签。
DSP实验课大作业设计

DSP实验课大作业设计一实验目的二实验内容三实验步骤该实验中设定的几个参数(必须给出)TargetDistance=[3000 8025 8025 s]---------------目标距离TargetVelocity=[50 0 -120 v]---------------目标速度四实验结果及讨论本部分将详细分析实验得到的数据、图像、误差、产生速度模糊的原因以及脉压频域、时域执行周期。
4.1脉压、MTI、MTD结果的比较:(1)脉冲压缩的结果对比如图1所示。
通过上图可以看到,前后共有16个PRT,每个PRT都有3根线,距离可以算出是(x-1)*75m=s m……。
目标1是第一根,有遮挡,所以幅度低,带宽小,且与系数不匹配,时域的脉压峰就宽。
目标2与3由于距雷达距离相等,所以脉压结果重合矢量相加,中间线幅度在明显变化,相当于目标4的(1-0.5,1+0.5)倍之间。
(2)MTI结果对比如图2所示。
由于目标2是静止目标经过1次时延对消被滤除了,按照“MTI幅度-速度响应曲线”,199m/s处的MTI增益最大,0m/s和398m/s的响应都是0,以此来解释3个运动目标相对的幅度变化关系。
例如,230m/s的增益比278m/s(等同于-120m/s)的增益大,这解释了MTI前后目标3、4间幅度对比的变化。
(3)MTD结果对比如图3所示。
MTD算法实现了每个通道对应一个中心频率为(PRF/16)*n(n=-8,-7…6,7)的多通道滤波器组,这样可以将不同速度的目标通过不同的滤波器分辨出,通道数越多,速度分辨率越高。
另外,当多普勒频率刚好或接近为某个中心频率的目标通过滤波器时,该目标会得到“足量的”相参积累。
无泄漏时,MTD的幅度增益对所有速度的目标都是16倍。
目标二为静目标,正好处在通道0的中心,从而进行了相参积累,输出幅度增益最大。
频谱泄漏与多普勒通道的频率分辨率有关,最严重的泄漏发生在:fd=(2n+1)/2*分辨率或者等效的v=(2n+1)/2*速度分辨率如速度分辨率为25m/s,速度为37.5m/s,则在多普勒通道1和2上有“等值的平顶”,幅度较低。
dsp大作业
数字信号处理DSP上机题班级:学号:姓名:数字信号处理中的几种基本算法简介在数字信号处理中,采样、离散傅立叶变换(DFT )、快速傅立叶变换(FFT )、卷积、相关和数字滤波器是最基本的也是最常用的基本算法。
模拟信号经过采样后,转换成数字信号,就可以利用各种数字信号处理算法进行处理。
简要介绍几种基本的数字信号处理算法:▪ 离散傅里叶变换(DFT )及其快速算法(FFT ) ▪ 卷积、相关和FIR 数字滤波器DFT 和FFT离散傅里叶变换(DFT)的计算公式为:⎥⎦⎤⎢⎣⎡-==∑∑-=--=N nk j N nkn x en x k X N n Nnk jN n πππ2sin 2cos )()()(121其中x(n)是输入的数字序列,n=0~N-1;X(k)是输入数字序列的DFT 系数,k=0~N-1。
它仅存在于离散点,因此是离散谱。
快速傅里叶交换(FFT )是离散傅里叶交换(DFT )的快速算法,按照其计算方法分为▪ 按时间抽取(DIT ) ▪ 按频率抽取(DIF )通常要求输入数据长度N 是2的幂次。
用FFT 完成信号的时域和频域变换要比DFT 快的多,FFT 的运算量与数据长度N 的关系是Nlog 2N 。
FFT 的点数N 与频谱分辨率有直接关系,采样频率为f S 的N 点FFT 的频率分辨率为f S /N ,频谱宽度为从0到f S /2。
计算FFT 时的窗函数在计算FFT 时,有些情况下需要加窗函数,以便在不增加FFT 点数的情况下抑制旁瓣,使信号能量集中在所希望的频率点上。
常用的几种窗函数是:▪ Hanning (汉宁)窗:▪ Hamming (海明)窗:▪ Blackman 窗:卷积、相关和FIR 数字滤波器卷积、相关是信号处理中最常见的处理方法,它们都可以利用有限冲击响应nk n k n k k w ,,1,)114cos 08.0)112cos 5.042.0][ =⎪⎭⎫ ⎝⎛--+⎪⎭⎫ ⎝⎛---=ππn k n k k w ,,1,)12cos(15.0][ =⎪⎭⎫ ⎝⎛+-=π1,,0,)12cos 46.054.0]1[-=⎪⎭⎫ ⎝⎛--=+n k n k k w π(FIR )滤波器实现。
dsp实验报告哈工大实验一定时器实验

dsp实验报告哈工大实验一定时器实验实验一定时器实验一. 实验目的1. 通过实验熟悉LF2407A 的定时器;2. 掌握LF2407A 定时器的控制方法;3. 掌握LF2407A 的中断结构和对中断的处理流程;4. 学会运用中断程序控制程序流程。
二. 实验设备计算机,ICETEK-LF2407-EDU 实验箱(或ICETEK 仿真器+ICETEK-LF2407-A系统板+ 相关连线及电源)。
三. 实验原理1. 通用定时器介绍及其控制方法⑴.事件管理器模块(EV)TMS320LF2407A DSP 片内包括两个事件管理模块EVA 和EVB ,每个事件管理器模块包括通用定时器(GP)、比较单元以及正交编码脉冲电路。
每个事件管理模块都包含两个通用定时器,用以完成计数、同步、定时启动ADC、定时中断等功能。
⑵.通用定时器(GP)每个通用定时器包括:一个16 位的定时器增/减计数的计数器TxCNT,可读写;一个16 位的定时器比较寄存器(双缓冲,带影子寄存器)TxCMPR,可读写;一个16 位的定时器周期寄存器(双缓冲,带影子寄存器)TxPR,可读写;一个16 位的定时器控制寄存器TxCON,可读写;可选择的内部或外部输入时钟;用于内部或外部时钟输入的可编程的预定标器(Prescaler);控制和中断逻辑,用于4 个可屏蔽中断—下溢、溢出、定时器比较和周期中断;可选择方向的输入引脚TDIRx,用于双向计数方式时选择向上或向下计数。
通用定时器之间可以彼此独立工作或相互同步工作,完成复杂的任务。
通用定时器在中断标志寄存器EVAIFRA,EVAIFRB,EVBIFRA 和EVBIFRB中有12 个中断标志位。
每个通用定时器可根据以下事件产生4 个中断:上溢—TxOFINF(x=1,2,3 或4);下溢—TxUFINF(x=1,2,3 或4);比较匹配--TxCINT(x=1,2,3 或4);周期匹配--TxPINT(x=1,2,3 或4)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSP-F2812的最小系统设计姓名学号班级时间一、设计目的:TMS320F2812DSP是TI公司一款用于控制的高性能、多功能、高性价比的32位定点DSP。
它整合了DSP和微控制器的最佳特性,集成了事件管理器,A/D转换模块、SCI通信接口、SPI外设接口、eCAN 总线通信模块、看门狗电路、通用数字I/O口、多通道缓冲串口、外部中断接口等多个功能模块,为功能复杂的控制系统设计提供了方便,同时由于其性价比高,越来越多地被应用于数字马达控制、工业自动化、电力转换系统、医疗器械及通信设备中。
通过本课程的学习,我对DSP的各个模块有了较为深入的了解,希望可以通过对最小系统的设计,进一步加深对DSP的学习,能在实践中运用DSP,提高自己的动手实践能力。
二、设计思路所谓最小系统就是由主控芯片加上一些电容、电阻等外围器件构成,其能够独立运行,实现最基本的功能。
为了验证DSP的最基本的功能,我设计了如下单元:有源电路的设计、复位电路及JATG下载口电路的设计、外扩RAM的设计、串口电路的设计、外扩A/D模块电路的设计。
三、详细设计步骤和原理1、电源电路的设计TMS320F2812工作时所要求的电压分为两部分:3.3V的Flash电压和1.8V的内核电压。
TMS320F2812对电源很敏感,所以在此推荐选择电压精度较高的电源芯片TPS767D318。
TPS767D318芯片输入电压为+5V,芯片起振,正常工作之后,能够产生3.3V和1.8V两种电压电压供DSP使用。
如下图所示:2、复位电路及JATG下载口电路的设计考虑到TPS767D301芯片自身能够产生复位信号,此复位信号可以直接供DSP芯片使用,所以不用为DSP设置专门的复位芯片。
在实际设计过程中,考虑到JATG下载口的抗干扰性,在与DSP 相连接的接口均需要采用上拉设计。
3、外扩RAM的设计TMS320F2812芯片内部具有18K*16位RAM空间。
当程序代码长度小于18K*16位时,该芯片内部的RAM空间就能够满足用户的需求。
但是当程序代码大于这个时,DSP片内的RAM空间就不够用了。
TMS320F2812的外部接口XINTF是一种非多路选通的异步总线。
设计时,可以通过XINTF接口来外扩存储器。
TMS320F2812有19根地址线和16根数据线,所以可以外扩容量为64K*16位的SRAM芯片,如IS61LV6416。
4、串口电路的设计串口通信口(SCI)是一种采用两根信号线的异步串行通信接口,又称UART。
在TMS320F2812中游两组SCI通信,SCIA和SCIB。
SCI 模块的接收器和发送器都带有16级深度的FIFO,并且接收器和发送器都有独立的使能和中断位,可以在半双工模式下独立操作,也可以在全双工模式下同时操作。
根据TMS320F2812已有的资源设计SCI 串口通信的话,可以选用MAX3232芯片,具体电路设计如下:5、A/D模块的设计TMS320F2812内部具有16路12位的A/D转换器,采样精度为12位,它有2个采样保持器,具有单一或者级联;两种转换模式,最高转换速率为12.5MSPS。
从理论上讲,ADC模块的采样精度还是可以的。
但是根据工程经验,一般ADC模块的采样精度都会比理论值少3位,也就是说12位ADC模块,采样精度在比较好的情况下能达到9位,这个精度很多情况下并不尽如人意,给实际应用带来极大的困扰。
因此实际应用中,可以外扩AD芯片AD7864AS_2,连接原理图如上图所示。
四、演示程序源代码:本文我选取了自己编写的两个程序进行验证,测试GPIO 口以及定时器的功能。
1、控制GPIOA0口输出高低电平#include"DSP28_Device.h"//头文件,包含各种寄存器的定义和配置#include"DSP28_Globalprototypes.h"void delay_loop(void); //延时函数的声明void main(void){int kk=0;//变量,用作延时InitSysCtrl();//初始化系统函数DINT;IER=0x0000;//禁止CPU中断IFR=0x0000;//清除CPU中断标志InitPieCtrl();//InitPieVectTable();InitGpio();while(1){GpioDataRegs.GPACLEAR.bit.GPIOA0=1;//GPIOA0口输出低电平for(kk=0;kk<100;kk++)delay_loop();//实现延时功能GpioDataRegs.GPASET.bit.GPIOA0=1;//GPIOA0口输出高电平for(kk=0;kk<100;kk++)delay_loop();//再延时一段时间}}void delay_loop()//延时函数的定义{short i;for(i=0;i<30000;i++){}}实验结果:利用示波器观察GPIOA0口发现会有高低电平不断跳变。
2、利用定时器0实现控制GPIOA0口隔1S进行高低电平的转换#include "DSP28_Device.h"void main(void){InitSysCtrl();InitCpuTimers();//初始化CPU定时器0DINT;//禁止和清除所有CPU中断InitPieCtrl();//初始化中断向量IER-0x0000;IFR=0x0000;//InitPieCtrl();InitPieVectTable();//初始化中断向量表InitPeripherals();//初始化CPU定时器模块InitGpio();//初始化GPIOPieCtrl.PIEIER1.bit.INTx7=1;IER|=M_INT1;//开CPU中断1EINT;//使能全局中断ERTM;//使能实时中断ConfigCpuTimer(&CpuTimer0,150,1000000);//调用时钟配置函数,将定时器设置为1S。
StartCpuTimer0();//启动定时器for(;;){}}interrupt void TINT0_ISR(void) // CPU-Timer0中断函数,在文件DSP28_DefaultIsr.c中{ // 中断函数代码CpuTimer0.InterruptCount++;if(CpuTimer0.InterruptCount==1){GpioDataRegs.GPACLEAR.bit.GPIOA0=1;}if(CpuTimer0.InterruptCount==2){GpioDataRegs.GPASET.bit.GPIOA0=1;CpuTimer0.InterruptCount=0;}CpuTimer0Regs.TCR.bit.TIF=1;PieCtrl.PIEACK.bit.ACK1=1;PieCtrl.PIEACK.all = PIEACK_GROUP1;EINT;}/**************************************************************************** **名称:ConfigCpuTimer()**功能:此函数将使用Freq和Period两个参数来对CPU定时器进行配置。
Freq以MHz * 为单位,Period以us作为单位。
**入口参数:*Timer(指定的定时器),Freq,Period**出口参数:无*在文件DSP28_CpuTimers.c中****************************************************************************/void ConfigCpuTimer(struct CPUTIMER_VARS *Timer, float Freq, float Period){Uint32 temp;Timer->CPUFreqInMHz = Freq;Timer->PeriodInUSec = Period;temp = (long) (Freq * Period);Timer->RegsAddr->PRD.all = temp; //给定时器周期寄存器赋值Timer->RegsAddr->TPR.all = 0; //给定时器预定标寄存器赋值Timer->RegsAddr->TPRH.all = 0;// 初始化定时器控制寄存器:Timer->RegsAddr->TCR.bit.TIF=1; //清除中断标志位Timer->RegsAddr->TCR.bit.TSS = 1; //停止定时器Timer->RegsAddr->TCR.bit.TRB = 1; //定时器重装,将定时器周期寄存器的值装入定时器计数器寄存器Timer->RegsAddr->TCR.bit.SOFT = 1;Timer->RegsAddr->TCR.bit.FREE = 1;Timer->RegsAddr->TCR.bit.TIE = 1; //使能定时器中断Timer->InterruptCount = 0; //初始化定时器中断计数器}实验结果:利用示波器观察GPIOA0口发现每隔一秒会出现高低电平跳变一次。