伺服控制器调试说明(完成)
三菱MR-E伺服调试说明

MITSUBISHI三菱MR-E数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 三菱MR-E连接示意图 2. 通电前的检查 3. 通电时的检查 4. 三菱MR-E伺服驱动器的参数设定方法 5. 三菱MR-E伺服驱动器的参数表 6. 三菱MR-E伺服驱动器的参数和性能优化调整 1.三菱MR-E连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在三菱的保修范围!) 2. 通电前的检查 1) 确认三菱MR-E伺服驱动器和电机插头的连接,相序是否正确: A. 中惯量电机HC-SFE 52(0.5KW)~152(1.5KW)的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 B1 G 刹车电源 B2 H B. 中惯量电机HC-SFE 202(2.0KW)的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 B1 E 刹车电源 B2 F 注: 电机相序错误,通电时会发生电机抖动现象。
刹车电源 B1、B2无极性。
2)确认三菱MR-E伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认三菱MR-E伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认接地可靠。
4.三菱MR-E伺服驱动器的参数设定方法 三菱MR-E伺服驱动器修改参数的操作方法,如下: 1) 按“MODE”按钮,可切换显示以下6种方式, 2 切换到显示基本参数画面: 2) 按○·UP和○· DOWN键,选择想修改参数的参数号(例修改2号参3) 按2次○·SET键(想修改参数的参数值显示并闪烁)。
ASDA伺服调试指南

ASDA伺服调试指南ASDA伺服是一种先进的控制系统,广泛用于工业自动化、机械加工和自动化设备等领域。
在使用ASDA伺服控制系统前,需要对其进行调试和优化,以确保其正常工作并达到最佳性能。
下面是ASDA伺服调试指南,帮助用户进行更有效的调试。
一、硬件连接1.确保所有的电缆和连接器都正确连接,并且没有松动或断裂。
2.检查电源供应是否稳定,电压波动范围在允许范围内。
3.确保伺服电机与伺服控制器之间的连接正确,并且电机型号与伺服控制器参数设置一致。
4.检查伺服控制器的安装位置是否合适,不受外部干扰和电磁干扰。
5.确保伺服系统的接地良好,减少影响信号传输和保护系统的外部干扰。
二、参数设置1.在开始调试前,需要将伺服控制器的相关参数设置为默认值,以避免出现误操作或误解。
2.根据实际应用需求,设置伺服控制器的运动参数,包括速度、加速度、减速度等。
3.设置伺服电机的PID参数,保证其在运动过程中的响应速度和控制精准度。
4.根据实际负载情况,设置伺服控制器的额定电流、电压和功率参数,以保证伺服系统的正常工作和运行稳定。
5.设置伺服系统的限位保护参数,保证在应用过程中不会出现超速、超载等异常情况。
三、调试步骤1.手动调试:首先进行手动调试,通过手动操作伺服电机,观察伺服系统的运动情况,包括速度、力矩、位置等。
2.自动校准:进行自动校准,让伺服系统自动检测和校准参数,以确保伺服系统的正常工作。
3.运动测试:进行运动测试,以验证伺服系统的运动性能和运行稳定性,包括速度、加速度、减速度等参数。
4.负载测试:进行负载测试,模拟实际负载情况,测试伺服系统的响应速度、控制精度和运行稳定性。
5.故障诊断:在调试过程中,如果出现异常情况或故障,需要及时进行故障诊断和处理,以确保伺服系统正常工作。
四、性能优化1.优化PID参数:根据实际应用需求和运动性能要求,调整伺服电机的PID参数,以提高运动响应速度、位置控制精度等。
2.优化运动参数:根据实际负载情况和运动速度要求,调整伺服系统的运动参数,包括速度、加速度、减速度等。
伺服设定及调试步骤
FANUC伺服系统一般调整BEIJING-FANUC FANUC伺服系统一般调整BEIJING-FANUC停止中的振动抑制BEIJING-FANUC 停止中的振动抑制BEIJING-FANUC停止中的振动抑制停止中的振动抑制停止中的振动抑制停止中的振动抑制积压进给(爬行)的抑制BEIJING-FANUC 积压进给(爬行)的抑制BEIJING-FANUCSERVO GUIDE 测量图形过冲的抑制BEIJING-FANUC 过冲的抑制BEIJING-FANUC高速高精度伺服调整BEIJING-FANUC 高速高精度伺服调整BEIJING-FANUC高速高精度调整概述BEIJING-FANUC 高速高精度调整概述BEIJING-FANUC高速高精度调整概述BEIJING-FANUC 高速高精度调整概述BEIJING-FANUCHRV控制设定BEIJING-FANUC HRV控制设定BEIJING-FANUC滤波器调整BEIJING-FANUC 滤波器调整BEIJING-FANUC速度增益调整BEIJING-FANUC 速度增益调整BEIJING-FANUC位置增益调整BEIJING-FANUC 位置增益调整BEIJING-FANUC前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUC前馈0%前馈100%前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUC前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUCY轴需加VFFY500大了前馈调整BEIJING-FANUC 前馈调整BEIJING-FANUCY:好结果圆弧半径减速BEIJING-FANUC 圆弧半径减速BEIJING-FANUC10μm/div 拐角钳制速度F2000/R5拐角减速BEIJING-FANUC 拐角减速BEIJING-FANUCA B C速度差减速功能速度差减速功能BEIJING-FANUC速度差减速功能小结小结小结小结小结•双位置反馈功能(选择功能)•只要半闭环不出现震动,全闭环就可以消除震动。
maxon motor ESCON伺服控制器设置说明书
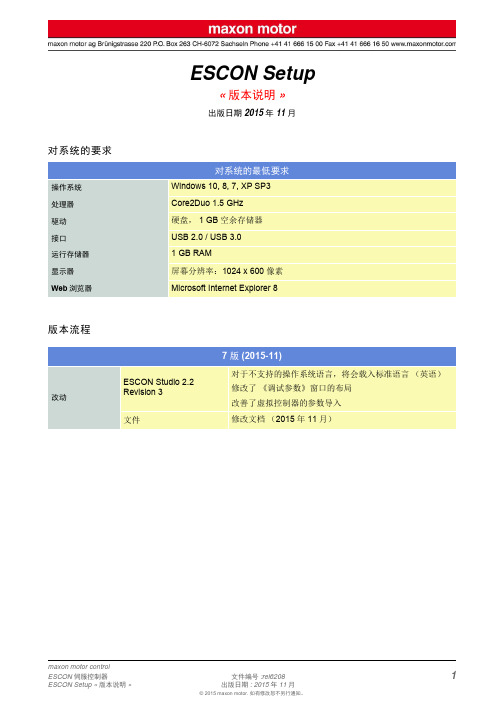
ESCON Setup«版本说明»出版日期 2015年11月对系统的要求版本流程对系统的最低要求操作系统Windows 10, 8, 7, XP SP3处理器Core2Duo 1.5 GHz 驱动硬盘,1 GB 空余存储器接口USB 2.0 / USB 3.0运行存储器1 GB RAM 显示器屏幕分辨率:1024 x 600像素Web 浏览器Microsoft Internet Explorer 87版 (2015-11)改动ESCON Studio 2.2Revision 3对于不支持的操作系统语言,将会载入标准语言(英语)修改了《调试参数》窗口的布局改善了虚拟控制器的参数导入文件修改文档(2015年11月)特征参数ESCON Studio 2.2新增针对伺服控制器ESCON Module 24/2的支持功能引入了针对转速/电流设定值、偏移和电流限制的RCServo信号输入(PWM脉冲时间)新功能也包括可以通过模拟输入调节变速ESCON Module 24/2发布文档:– 固件版本《读我》文件(2014年11月)– 功能表(2014年11月)– 使用说明书(2014年11月)改动ESCON Studio 2.2优化了无传感器EC电机的“调试参数”性能和稳定性普遍改善ESCON 36/2 DCESCON 36/3 ECESCON Module 50/4 EC-SESCON 50/5ESCON Module 50/5ESCON 70/10ESCON固件0x0150的升级软件修改文档:– 固件版本《读我》文件(2014年11月)– 使用说明书(2014年11月)5特征参数ESCON Studio 2.1还支持伺服控制器ESCON Module 50/4 EC-S扩展了«数据记录»工具ESCON Module 50/4 EC-S启用ESCON固件0x0140的升级软件启用的文档:– 固件版本的«读我»文件(2013年9月)– 功能列表(2013年9月)– 使用说明书(2013年9月)改动ESCON Studio 2.1性能和稳定性普遍改善ESCON 36/2 DCESCON 36/3 ECESCON 50/5ESCON Module 50/5ESCON 70/10ESCON固件0x0140的升级软件修改的文档:– 固件版本的«读我»文件(2013年9月)– 使用说明书(2013年9月)4 2改动ESCON Studio 2.0Revision 2修正了«使能:顺时针» 和 «使能:逆时针» 的设置问题特征参数ESCON Studio 2.0还支持ESCON 70/10伺服控制器及ESCON Module 50/5引入了«虚拟控制器»选项(配置上不考虑伺服控制器)引入了«电流检定仪»扩展了«数据记录»工具ESCON Module 50/5ESCON 70/10启用ESCON固件0x0130的升级软件启用的文档:– 固件版本的«读我»文件(2013年3月)– 功能列表(2013年3月)– 使用说明书(2013年3月)改动ESCON Studio 2.0性能和稳定性普遍改善表达方面稍有调整ESCON 36/2 DCESCON 36/3 ECESCON 50/5ESCON固件0x0130的升级软件修改的文档:– 固件版本的«读我»文件(2013年3月)– 使用说明书(2013年3月)32改动ESCON 36/3 EC文档的加工:–使用说明书(2012年10月)3特征参数ESCON Studio 1.2还支持伺服控制器ESCON 36/3 EC支持其他语言:日语(ja)、中文(zh)引入«诊断»助理引入«数据记录»工具ESCON 36/3 ECESCON固件0x0120的升级软件文档的加工:–固件版本的«读我文件»(2012年9月)–功能列表(2012年9月)–使用说明书(2012年9月)改动ESCON 36/2 DCESCON 50/5ESCON固件0x0120的升级软件文档的加工:–固件版本的«读我文件»(2012年9月)–使用说明书(2012年9月)商标和商标所有者·Core2Duo™; © Intel Corporation, USA-Santa Clara, CA·Windows®, Internet Explorer®; © Microsoft Corporation, USA-Redmond, WA 特征参数ESCON Studio 1.1还支持伺服控制器ESCON 50/5支持其他语言:意大利语(it )、西班牙语(es )引入«启动辅助»内的接线总览引入«控制器监控»、总览和特征参数ESCON 50/5ESCON 固件0x0110的升级软件文档的加工:–固件版本的«读我文件»(2012年3月)–功能列表(2012年3月)–使用说明书(2012年3月)改动ESCON 36/2 DC ESCON 固件0x0110的升级软件文档的加工:–固件版本的«读我文件»(2012年3月)–使用说明书(2012年3月)11改动ESCON Studio 1.0Revision 2点击操作元件图标时«控制器监控»不会死机。
ASDA伺服调试指南

ASDA伺服调试指南引言:一、准备工作:在开始调试之前,确保您已经完成了以下准备工作:1.确认您已经正确安装了ASDA伺服系统,并检查所有连接是否牢固。
2.确定您已经正确设置了伺服驱动器的参数。
这包括了设定伺服驱动器的通讯地址、波特率以及其他必要的参数。
二、连接与通讯:1. 检查伺服驱动器与PLC或上位机之间的通讯连接。
确保连接的稳定性和正确性。
您可以使用RS485或EtherCAT等常见的通讯协议进行连接。
2.确认驱动器的通讯参数与PLC或上位机相匹配。
包括通讯地址、波特率、通讯协议等。
三、控制器设置与参数调整:1.确认控制器与伺服驱动器的通讯方式是否正确设置。
根据控制器的要求,选择正确的通讯方式,并设置相关的参数。
2.根据实际需求,调整基本的控制参数,如转速、加速度、减速度等。
四、调试过程:1.确认伺服驱动器的状态:在进行调试之前,首先需要确认伺服驱动器的状态是否正确。
检查运行指示灯、报警指示灯等,确保伺服驱动器正常工作。
2.进行位置校准:如果您需要对伺服系统进行位置控制,那么在调试之前,您需要进行位置校准。
使用合适的位置传感器或编码器对位置进行校准,并确保驱动器与实际位置的匹配。
3.进行速度控制调试:将伺服驱动器设置为速度控制模式,并根据需要设置速度参数。
通过逐步调整参数,并进行实际测试,逐渐优化速度控制性能。
4.进行力矩控制调试:将伺服驱动器设置为力矩控制模式,并根据需要设置力矩参数。
通过逐步调整参数,并进行实际测试,逐渐优化力矩控制性能。
5.进行位置控制调试:将伺服驱动器设置为位置控制模式,并根据需要设置位置参数。
通过逐步调整参数,并进行实际测试,逐渐优化位置控制性能。
五、调试验证与故障排除:1.进行实际测试,并验证伺服系统的性能。
确保伺服系统在不同负载下的运行能力,并检查其稳定性和精度。
2.如果在调试过程中发现了故障或问题,根据驱动器的报警代码和手册中提供的故障排除方法进行解决。
3.在调试完成后,对伺服系统进行最终的验证,确保其能够满足实际应用的需求。
嘉强 AheadTechs 伺服调试步骤说明说明书

AheadTechs伺服调试步骤说明History:感谢您选择本公司的产品!本手册对嘉强AheadTechs品牌伺服驱动器的调试使用做了详细的介绍,包括步骤、操作、维护说明等。
如果您还有其它事项需要了解的,可直接咨询本公司。
在使用本系列伺服驱动器及相关的设备之前,请您详细阅读本手册,这将有助于您更好地使用它。
目录第一章制动电阻选型 (3)1.1制动电阻选型 (3)第二章伺服接线以及上电设置 (3)2.1伺服上电 (3)第三章伺服增益设置 (4)3.1填写合适的惯量比 (4)3.1.1横量轴 (4)3.1.2龙门轴 (4)3.2调整刚性等级 (4)3.3关闭刚性等级表 (4)3.4手动调整速度环参数 (4)3.5手动调整位置环参数 (5)3.6增益调试总结 (5)3.8关于2.5KW伺服驱动器适配2.3KW电机参数设置 (6)第四章伺服驱动器常见报警处理方法 (7)4.1,报警处理方法 (7)4.2伺服驱动器参数设置教程演示 (8)4.2.1以更改07.20参数为例 (8)4.3,如何使用软件进行监控 (11)第一章制动电阻选型1.1制动电阻选型电机功率小于1KW,使用40欧姆200W制动电阻电机功率大于等于1KW,使用30欧姆400W制动电阻第二章伺服接线以及上电设置2.1伺服上电正常上电之后,伺服在没有使能情况下,键盘显示为“ok rdy”,此时表示伺服准备好,可以正常运行。
若上电键盘显示“no rdy”,此时有两种情况:A)机器为750W及以下机型时,则检查输入电源的接线是否接错,正常接线时,5pin端子的第3个脚是没有接线的;正常接线之后若依然“no rdy”,则查看P21.06(母线电压值),正常电压在311.0V左右,不正常则再次检查输入电源;若母线电压正常,伺服“no rdy”,则可能需要更换驱动器;B)机器为1kw及以上机型,由于功率较大,原则上是需要接入三相220V电源的,否则会对机器的可靠性产生影响,同时也可能影响驱动器的控制性能,如确实需要使用单相220V电源输入时,需要将电源是输入缺相屏蔽,设置P06.30=1,P07.22=1001即可,另外需要注意电源输入前端是否存在“伺服电子变压器”;伺服电子变压器的作用是将三相交流380V转换成三相交流220V电源,但此变压器输出的220V电不是严格的三相交流电,其中两相为同相位,另一相为0V,此时可能出现以下情况:①伺服上电无显示,可以判定控制电接到了同相位的输出端了,改一根接线到剩下的那一相即可;②伺服上电显示“no rdy”,查看P21.06(母线电压值)电压正常,此时只需屏蔽输入缺相即可。
汇川伺服性能调试指导

工业自动化 | 电梯 | 新能源汽车 | 工业机器人 | 轨道 交通
第二部分
汇川伺服调试流程--惯量辨识
不同应用场合的推荐惯量比:
(1) 在要求高响应的场合,惯量比要控制在5倍以下,最高不要超过10倍, 一般来讲: 皮带轮或齿轮齿条: 10倍以内(连接刚性不太高,精度要求不太高) 丝杠或联轴器直连: 5倍以内(连接刚性较好,精度要求较高) 定位精度或响应要求高的情况: 2倍以内
PB是丝杆导程
— 8—
工业自动化 | 电梯 | 新能源汽车 | 工业机器人 | 轨道 交通
第二部分
汇川伺服调试流程--惯量辨识
可以让伺服驱动器 通过快速的加减速运动自动辨识出惯量, 方便且准确。注意:惯量辨识无法静态 实现。惯量辨识基本原理:
整体转动惯量J
=
加速转矩T 角加速度
离线惯量辨识(手动惯量辨识)
惯量”,功能码是H0815。
如果电机轴上不连接任何负载, H0815应设为0.00 如果电机轴上连接一个同样的电机,H0815应设为1.00
— 7—
工业自动化 | 电梯 | 新能源汽车 | 工业机器人 | 轨道 交通
第二部分
汇川伺服调试流程--惯量辨识
如何计算出惯量:
可以根据机械的类型和参数手工计算,优点是可以预估, 便于选型;缺点是需要了解很多机械参数,计算复杂。
离线惯量辨识方式1:即使用H0d02进入离线 惯量辨识模式。注意: 1、电机有正反各1圈以上的可运动行程; 2、实际负载惯量比必须小于120倍以下;
3、电机处于不使能状态;
4、机械刚性较高或传动机构背隙较小。
— 9—
开始 伺服使能OFF 进入H0D-02
长按“UP/DOWN” 键
(完整)三菱伺服实际调试设置实操

三菱制定位单元起动伺服电机(步进电机等)顺序书1.前期准备①最小限的参数设定基本参数根据控制对象进行选择.水平、垂直移动装置为mm、旋转装置为degree最佳。
1转的脉冲数输入伺服电机式样书中记载的编码器、伺服电机每1转的分辨力。
1转的移动量根据机械构造,输入伺服电机转1转时装置的移动距离.因皮带轮的径以及钻孔螺丝端部的不同而不同,所以最好与机械设计担当者确认.根据需要进行选择。
如果是步进电机需要进行设定。
根据系统进行选择.零点信号有或无会产生结果不同,需要注意。
基本是負方向,因原点传感器的位置也有正方向的情况。
速度②根据机械构造需要重新设定的参数~31~3急停选择后的移动量设定③三菱伺服电机使用时需要设定的参数2.配线检查①原点传感器上确认原点信号的ON/OFF。
②上下限限制传感器上下限限制信号的ON/OFF。
3.电机旋转方向以及上下限限制传感器的方向确认①JOG运转中确认电机的旋转方向。
+JOG(离开原点传感器的方向)时,伺服电机的现在值增加吗?-JOG(接近原点传感器的方向)时,伺服电机的现在值减少吗?逆运转时,旋转方向的设定(Pr107orPr6)变更为相反的。
②上下限限位传感器方向确认上記①中,电机的旋转方向确认后,再度用+JOG起动伺服电机,如果用150mm标尺灯遮断上限限位传感器,确认伺服电机有没有停止.如果没有停止,再次确认上限限位传感器的配线以及方向性(需要确认上下限限位传感器是否反了。
)。
用同样方法确认下限限位传感器。
4.装置的可动范围的确认上記3.中的旋转方向以及上下限限位传感器的方向的确认作业如果完成了,JOG运转中移动装置至上下限限位传感器起动,确认装置的可动范围.5.原点复位①根据原点复位方式再确认必要的设定项目,特别要注意挡块停止方式时的原点复位扭矩限制值的设定,计数方式时得近点ドグON后的移动量设定要注意是否恰当。
②JOG运转中将装置移动至上下限限位传感器的正中位置,进行原点复位,如果装置移动至远离传感器的方向时,直接使装置停止,变更原点复位方向(Pr46)后,再度进行原点复位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服控制器调试说明
伺服控制器调试前必须做好以下两项准备工作:
1. 将静叶置手动状态,使用电磁阀关闭静叶,现场观测静叶应该向关小的方向动作。
静叶关到最小时,位置传感器的反馈电流应为4mA 左右(不要求是准确的
4mA 。
2. 将静叶置手动状态,使用电磁阀开启静叶,现场观测静叶应该向开大的方向动作。
静叶开到最大时,位置传感器的反馈电流应为20mA 左右(不要求是准确的
20mA 。
开始调试:
1. 将静叶置手动状态,使用电磁阀完全关闭静叶,按手操器F1 键,此时手操器屏幕上有“确定传感器新零点”字样,按回车键确认。
2. 将静叶置手动状态,使用电磁阀完全开启静叶,按手操器F2 键,此时手操器屏幕上有“确定传感器新量程”字样,按回车键确认。
3•同时按下手操器shift和F1键即F5键,此时手操器屏幕上有设定K值”字样。
设置K 值为 1.0000。
此时将静叶置手动状态,使用伺服阀控制静叶,在静叶开度设置框中打入不同数字,现场观测静叶应该可以动作。
如果静叶不动作, 请将K 值设定为-1.0000。
K值只能为1.0000或-1.0000。
更改K值先同时按shift和F1,再按回车键,此时K 值的末位数字闪烁,按下shift 不放同时按上下键可以将光标左右移动。
单按上下键可以改变光标所在位的数字。
4. 将静叶置手动状态,使用伺服阀控制静叶, 在静叶开度设置框中打入0.0, 现场观测静叶应该关到最小。
此时按下F3键,此时手操器屏幕上有确定指示电流新零点”字样, 按回车键, 更改此值为6400.0, 按回车键确认。
通过增加或减小指示电流零点的值使电脑中显示静叶开度为0.0~0.5%。
5. 将静叶置手动状态,使用伺服阀控制静叶, 在静叶开度设置框中打入100.0,现场观测静叶应该开到最大。
此时按下F4键,此时手操器屏幕上有确定指示电流
新量程”字样, 按回车键,更改此值为32000.0,按回车键确认。
通过增加或减小指示电流量程的值使电脑中显示静叶开度为99.5~100.0%。
6. 至此伺服控制器调节完毕,可以在静叶开度设置框中打入不同的值观测静叶动作和反馈值是否正常。
注:6400和32000,这两个值根据需要可以改动。