《自动控制原理》线性定常系统的状态观测器
2018华中科技大学829《自动控制原理》考试大纲
2018华中科技大学硕士研究生入学考试《自动控制原理》考试大纲科目名称:自动控制原理(含经典控制理论、现代控制理论)代码:829第一部分考试说明一.考试性质《自动控制原理》是为我校招收控制科学与工程专业硕士研究生设置的考试科目。
它的评价标准是高等学校优秀毕业生能达到良好及以上水平,以保证被录取者具有较扎实的专业基础。
二.考试形式与试卷结构(一)答卷方式:闭卷,笔试;(二)答题时间:180分钟。
(三)题型:计算题、简答题、选择题第二部分考查要点(一)自动控制的一般概念1.自动控制和自动控制系统的基本概念,负反馈控制的原理;2.控制系统的组成与分类;3.根据实际系统的工作原理画控制系统的方块图。
(二)控制系统的数学模型1.控制系统微分方程的建立,拉氏变换求解微分方程。
2.传递函数的概念、定义和性质。
3.控制系统的结构图,结构图的等效变换。
4.控制系统的信号流图,结构图与信号流图间的关系,由梅逊公式求系统的传递函数。
(三)线性系统的时域分析1.稳定性的概念,系统稳定的充要条件,Routh稳定判据。
2.稳态性能分析(1)稳态误差的概念,根据定义求取误差传递函数,由终值定理计算稳态误差;(2)静态误差系数和动态误差系数,系统型别与静态误差系数,影响稳态误差的因素。
3.动态性能分析(1)一阶系统特征参数与动态性能指标间的关系;(2)典型二阶系统的特征参数与性能指标的关系;(3)附加闭环零极点对系统动态性能的影响;(4)主导极点的概念,用此概念分析高阶系统。
(四)线性系统的根轨迹法1.根轨迹的概念,根轨迹方程,幅值条件和相角条件。
2.绘制根轨迹的基本规则。
3.0o根轨迹。
非最小相位系统的根轨迹及正反馈系统的根轨迹的画法。
4. 等效开环传递函数的概念,参数根轨迹。
5. 用根轨迹分析系统的性能。
(五)线性系统的频域分析1. 频率特性的定义,幅频特性与相频特性。
2. 用频率特性的概念分析系统的稳态响应。
3. 频率特性的几何表示方法。
自动控制原理线性定常系统的反馈结构及状态观测器教学PPT

状态反馈在形成最优控制、克服和抑制扰动作用、实现系统解耦 控制等方面具有很多的应用。
1、极点可配置的条件 1)利用状态反馈的极点可配置条件
定理5:用状态反馈任意配置闭环极点的充要条件:受控系统可控 证明: (1)充分性
u v Kx
通过反馈构成的闭环系统
x (A- BK)x Bv
是渐近稳定的,即(A-BK)的特征值均有负实部,则称系统 实现了状态反馈镇定。
定理4:当且仅当线性定常系统的不可控部分渐近稳定时,系统 是状态可镇定的。
定理4:当且仅当线性定常系统的不可控部分渐近稳定时,系统 是状态可镇定的。
证明:由于系统 {A, B} 不完全可控,则有可控性结构分解
vu
B
_
xI x S
A
F
y
C
x (A- BK)x Bv
如果 FC K 输出反馈等价于状态反馈
2、反馈结构对系统性能的影响
x (A- BK)x Bv
x (A- HC)x Bu
x (A- BFC)x Bv
状态反馈、输出反馈都会改变系统的系数矩阵,会影响系统的可 控性、可观测性、稳定性、响应特性等。
0 0 1 P 0 1 12
1 18 144
0 1 0 0
x 0 0
1
x
0u
0 72 18 1
0 0 0 1
x 1 6
0
x
0u
0 1 -12 0
系统的特征多项式 det[sI A] s3 18s2 72 s
希望特征多项式 a *(s) (s 1)(s 2 )(s 3 ) s3 4s2 6s 4
《现代控制理论》线性定常系统的反馈结构及状态观测器
求解状态反馈阵k 的步骤:
1) 校验系统的可控性
令
计算k
小结
B
I s
A
x
u
k
v
用状态反馈配置系统闭环极点
结论:1.状态反馈不改变系统的可控性,但可改变可观测性.
2.状态反馈不改变系统的闭环零点。
状态反馈的影响
二、状态反馈对系统零点和可观测性的影响
【例】 系统S:
此时系统可控可观
1).复合系统结构图(状态反馈+状态观测器)
输出内反馈及状态可观测性
续
状态反馈
状态观测器
复合系统
选状态变量
即:
y=Cx
输出内反馈及状态可观测性
2) 传递函数矩阵
结论:
状态观测器不影响传递函数
输出内反馈及状态可观测性
3)特征多项式
特征多项式
结论
1.引入观测器提高了系统的阶次(由n 2n )
2.整个闭环系统特征值由状态反馈下(A - BK)特征值和状态观测器下特征值(A-HC)组合而成,且相互独立。即观测器的引入不影响已配置好的系统特征值,而状态反馈也不影响观测性的特征值,这就是分离定理。
输出内反馈及状态可观测性
3.状态观测器的引入,不影响传递函数阵.且趋于 x(t) 的速度,取决于观测器的特征值。
分离定理
4).分离定理
定理: 若系统{A,B,C }可控又可观,用状态观测器估值形成状态反馈时,其系统的极点配置和观测器设计可分别独立运行,即K 和H 值的设计可分别进行,有时把K 和H 统称控制器. 一般观测器的响应速度应比状态反馈的响应速度快一些.
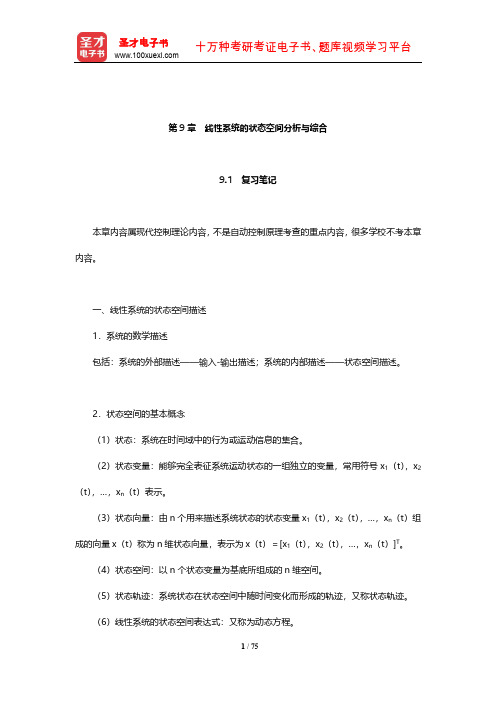
状态观测器概述
二、状态观测器概述
利用状态反馈能任意配置闭环系统的极点及有效改善系统性能,然而系统的状态变量并不能用物理方法测量.因此要使状态反馈在工程上实现就必须解决这个问题. 解决问题的方法之一就是重构系统的状态.并用这个重构状态代替原系统实际状态,实现状态反馈.
胡寿松《自动控制原理》笔记和课后习题(含考研真题)详解(线性系统的状态空间分析与综合)【圣才】
具有非正(负或零)实部,且具有零实部的特征值为 A 的最小多项式单根。
(2)系统的唯一平衡状态 xe=0 是渐近稳定的充分必要条件:A 的所有特征根均具有
3.线性定常连续系统状态方程的解 (1)齐次方程求解方法:幂级数法;拉普拉斯变换法。 (2)非齐次方程求解方法:积分法;拉普拉斯变换法。
4.传递函数矩阵 表达式:G(s)=C(sI-A)-1B+D
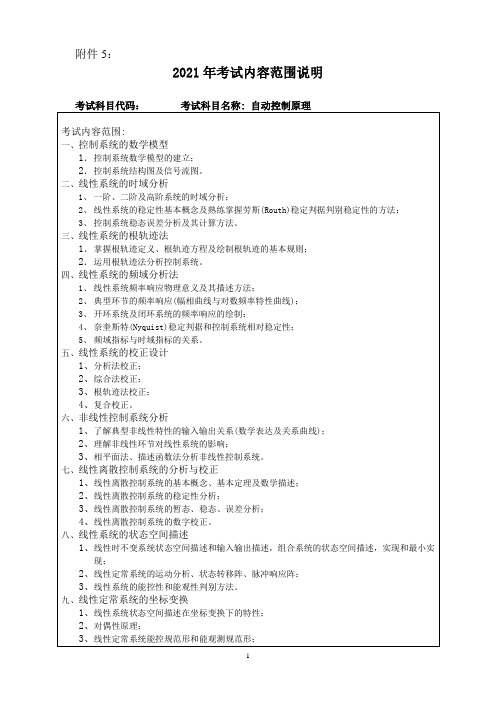
二、线性系统的可控性与可观测性 1.可控性 如果系统的每一个状态变量的运动都可由输入来影响和控制,而由任意的始点达到原点, 则该系统是完全可控系统,简称为系统可控。 (1)可控标准形
5 / 75
圣才电子书 十万种考研考证电子书、题库视频学习平台
的任意初始态 x0 出发的运动轨迹 x(t;x0,t0),在 t→∞都满足:||x(t;x0,t0)-xe||≤ε,
t≥t0,则称 xe 是李雅普诺夫意义下稳定的。
(3)渐近稳定
系统不仅满足李氏意义下的稳定,且
(2)可观测性判据
3 / 75
圣才电子书 十万种考研考证电子书、题库视频学习平台
自动控制原理 (2)
4、系统运动稳定性判据。
一十一、线性反馈系统的时间域综合
1、状态反馈和输出反馈;
2、极点配置的设计方法;
3、状态观测器的设计;
4、基于状态观测器的状态反馈系统。
考试总分:150分考试时间:3小时考试方式:笔试
考试题型:分析计算题(150分)
参考书目(材料)
《自动控制原理》,刘胜编著,哈尔滨工程大学出版社,2015年。
《线性系统理论》,陆军等编著,科学出版社,2019年。
2、线性定常系统的运动分析、状态转移阵、脉冲响应阵;
3、线性系统的能控性和能观性判别方法。
九、线性定常系统的坐标变换
1、线性系统状态空间描述在坐标变换下的特性;
2、对偶性原理;
3、线性定常系统能控规范形和能观测规范形;
4、线性系统的结构分解。
一十、李雅普诺夫稳定性分析
1、内部稳定性和外部稳定性;
2、李亚普诺夫意义下运动稳定性的基本概念;
3、控制系统稳态误差分析及其计算方法。
三、线性系统的根轨迹法
1.掌握根轨迹定义、根轨迹方程及绘制根轨迹的基本规则;
2.运用根轨迹法分析控制系统。
四、线性系统的频域分析法
1、线性系统频率响应物理意义及其描述方法;
2、典型环节的频率响应(幅相曲线与对数频率特性曲线);
3、开环系统及闭环系统的频率响应的绘制;
七、线性离散控制系统的分析与校正
1、线性离散控制系统的基本概念、基本定理及数学描述;
2、线性离散控制系统的稳定性分析;
3、线性离散控制系统的暂态、稳态、误差分析;
4、线性离散控制系统的数字校正。
八、线性系统的状态空间描述
1、线性时不变系统状态空间描述和输入输出描述,组合系统的状态空间描述,实现和最小实现;
自动控制原理胡寿松著科学出版社课后答案
自动控制原理 (胡寿松著) 科学出版社课后答案《自动控制原理》是胡寿松编著的一本关于自动控制原理的教材。
本书系统地介绍了自动控制的基本原理、方法和技术,适用于自动化、电气、机械等相关专业的本科生和研究生学习使用。
本书一共分为十一章,包括控制系统基础、传递函数与系统的时域特性、系统的频域特性、稳定性分析、根轨迹法、频率响应法、校正器设计、状态空间法、观测器设计、控制系统设计以及非线性系统控制等内容。
每一章都有相应的习题,用于检测学生对所学知识的掌握情况。
第一章:控制系统基础1. 控制系统的定义和分类。
控制系统是指通过对被控对象进行测量和判断,从而对被控对象进行控制的一种系统。
根据被控对象的特性和控制方式的不同,控制系统可以分为连续控制系统和离散控制系统。
2. 控制系统的基本组成。
控制系统由被控对象、测量元件、判断元件、执行元件和反馈元件组成。
3. 控制系统的基本特性。
控制系统的基本特性包括稳定性、灵敏度、精度和动态性能等。
第二章:传递函数与系统的时域特性1. 传递函数的定义和性质。
传递函数是描述控制系统输入和输出之间关系的函数。
传递函数具有线性性、时不变性和因果性等性质。
2. 系统的时域特性。
系统的时域特性包括阶跃响应、冲击响应和频率响应等。
第三章:系统的频域特性1. 频域特性的概念。
频域特性是指系统对不同频率的输入信号的响应情况。
2. 振荡特性的判据。
系统振荡的判据是极点的实部为零和虚部不为零。
第四章:稳定性分析1. 稳定性的定义。
稳定性是指系统在无穷远时间内对于有限输入的响应趋于有限。
2. 稳定性的判据。
稳定性的判据包括判别函数法、根轨迹法和Nyquist稳定判据等。
第五章:根轨迹法1. 根轨迹的概念和性质。
根轨迹是描述传递函数极点随参数变化而运动轨迹的图形。
2. 根轨迹的绘制方法。
根轨迹的绘制方法包括定性法和定量法。
第六章:频率响应法1. 频率响应的概念和性质。
频率响应是指系统对不同频率的输入信号的响应情况。
自动控制原理 前置课程
自动控制原理前置课程自动控制原理是电气工程、自动化及相关专业的一门重要课程,它涉及到系统建模、稳定性分析、控制器设计等多个方面。
在学习自动控制原理之前,需要掌握一系列的前置课程,以便更好地理解和应用自动控制原理。
一、自动控制原理概述自动控制原理主要研究如何实现自动化控制,通过对系统的建模、分析和控制,使系统在不同条件下达到预期性能。
这门课程的核心内容包括线性系统、非线性系统、稳定性分析、状态观测器、状态反馈控制器等。
学习自动控制原理,可以更好地理解和应用控制系统,提高工程实践能力。
二、前置课程分析1.数学基础课程:自动控制原理涉及大量的数学知识,如微积分、线性代数、概率论等。
掌握这些数学基础知识,有助于理解自动控制原理中的建模、分析和控制器设计等环节。
2.物理基础课程:自动控制原理中的很多概念和原理都与物理学密切相关,如力学、电磁学等。
学习这些物理课程,可以加深对自动控制原理的理解,提高解决实际问题的能力。
3.电气工程相关课程:如电路原理、信号与系统、电力电子技术等。
这些课程为自动控制原理提供了实际应用背景,学习这些课程可以更好地将自动控制原理应用于实际工程中。
三、自动控制原理的应用领域自动控制原理在众多领域都有广泛的应用,如工业控制系统、机器人控制、飞行器控制、交通运输系统控制等。
学习自动控制原理,不仅可以提高理论水平,还能为实际工程应用奠定基础。
四、学习自动控制原理的方法与建议1.注重理论联系实际:在学习过程中,要关注理论知识与实际工程应用的结合,通过实例加深对自动控制原理的理解。
2.加强数学基础:数学知识是学习自动控制原理的基础,要重视数学课程的学习,提高自己的数学素养。
3.多做练习题:通过做习题,检验自己对自动控制原理的理解和掌握程度,及时发现并弥补自己的知识盲点。
4.参加学术活动:积极参加相关学术活动,与同行交流自动控制原理的最新研究成果和应用经验,拓宽自己的视野。
5.动手实践:在实际项目中应用自动控制原理,提高自己的实际操作能力和解决问题的能力。
第5章状态反馈控制器及状态观测器

极点配置定理: 线性(连续或离散)多变量系统能任 意配置极点的充分必要条件是,该系统状态完全能控。
27
极点配置的方法:
一、采用状态反馈 (Ⅰ)定理:线性定常系统可通过线性状态反馈任意地配置其全 部极点的充要条件是:此被控系统状态完全能控。 (Ⅱ)方法: 单输入单输出线性定常系统的状态方程为:
& x=Ax+Bu
u 若线性反馈控制律为:
= v - Kx
28
按指定极点配置设计状态反馈增益阵的基本方法: 选择状态反馈增益矩阵使系统的特征多项式 det[λI − ( A − bK )]
* f (λ ) ,即 等于期望的特征多项式
det[λI − ( A − bK )] = f * (λ )
按指定极点配置设计状态反馈增益阵的基本步骤 (1)判断系统能控性 (2)求能控标准型的变换矩阵P
n −1 L SC = ⎡ b Ab A b⎤ ⎣ ⎦ −1 = L 0 0 1 P S [ ] 1 C
⎡ P ⎤ 1 ⎢ PA ⎥ P=⎢ 1 ⎥ ⎢ M ⎥ ⎢ n −1 ⎥ ⎣P ⎦ 1A
29
3)求出被控对象的特征多项式
f (λ ) = det[ λI − A] = λn + an−1λn−1 + L + a1λ + a0
⎡0 2 ⎤ rank[ B AB] = rank ⎢ =2=n ⎥ ⎣1 1 ⎦ ⎡C ⎤ ⎡1 2 ⎤ rank ⎢ ⎥ = rank ⎢ =2=n ⎥ ⎣CA⎦ ⎣7 4 ⎦
开环系统为状态能控又能观的。 2. 经状态反馈u=v-Kx后的闭环系统的状态方程为
⎡1 2 ⎤ ⎡0 ⎤ x ′ = ( A − BK ) x + Bv = ⎢ x + ⎢ ⎥v ⎥ ⎣0 0 ⎦ ⎣1 ⎦
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A
BK − HC
x
x −
xˆ
+
B0 v
(9-243a)
y = C
0x
x −
xˆ
(9-243b)
由于线性变换后系统传递函数矩阵具有不变性,由式(9-282)可导
出系统传递函数矩阵
G(s) = C
0sI
−
(
A− 0
BK
)
− BK −1 B
sI − ( A − HC)
0
(9-244)
利用分块矩阵求逆公式
(9-247)
的传递函数矩阵。这说明复合系统与状态反馈子系统具有相同的传
递特性,与观测器部分无关,可用估值状态 xˆ 代替真实状态 x 作为
反馈。2n维复合系统导出了(n n) 传递矩阵,这是由于 (x − xˆ) 的不
可控造成的。
由于线性变换后特征值具有不变性,由式(9-243)易导出其特征值 满足关系式
x1
尽快逼
近 x1 。用降维状态观测器实现状态反馈的原理结构图如图9—35所
示。由图可得降维状态观测器动态方程
x1 = A11 x1 + v − H (zˆ − z), zˆ = A21 x1
(9—342)
式中H为(n − q) q 矩阵。
图9—35 用降维观测器实现状态反馈原理结构图 分离定理同样适用于降维状态观测器(证明略)。
9-7 线性定常系统的状态观测器
一、引言 ➢被控系统可控时可以利用状态反馈任意配置闭环极点 ➢实现状态反馈的条件之一:状态变量可以用传感器测量
➢问题:不能用传感器测量时 怎么办?
➢ 实现状态反馈的条件之二:所有状态变量可以由 u, y 观测
➢ 状态观测器:用已知的输入和可测量的输出观测或构造状态 又称状态估计器,状态重构器
统,有q个输出变量可直接由传感器测得,对应的有q个状态变量便
无需观测器作出估计,只需估(n计− q) 个状态变量,称(n 为− q) 维
状态观测器。它是一(n个− q) 维子系统,结构比较简单,其动态
方程可由被控系统的线性变换导出。
1. (n-q)维子系统动态方程的建立
设可观测被控系统动态方程为
•
x = Ax + Bu, y = Cx
性。
定理9—7 若被控系统 (A, B,C)可观测,则其状态可用形如
•
xˆ = Axˆ + Bu − HC(xˆ − x) = ( A − HC)xˆ + Bu + Hy
(9-236)
的全维状态观测器给出估值,其中矩阵H按任意配置极点的需要来
选择,以决定状态误差衰减的速率。
选择H阵参数时,应注意防止数值过大带来的实现困难,如饱和效
反馈。
图9-26 状态观测器及其实现状态反馈结构图
二.全维状态观测器分析设计*
由图9-26可列出全维状态观测器动态方程 .
•
xˆ = Axˆ + Bu − H ( yˆ − y), yˆ = Cxˆ
(9-231)
故有
•
xˆ = Axˆ + Bu − HC(xˆ − x) = ( A − HC)xˆ + Bu + Hy
sI − ( A − BK )
− BK
= sI − ( A − BK ) • sI − ( A − HC)
0
sI − ( A − HC)
(9-248)
该式表明复合系统特征值是由状态反馈子系统和全维状态观测器的
特征值组合而成,且两部分特征值相互独立,彼此不受影响,因而
状态反馈矩阵K和输出反馈矩阵H可根据各自的要求来独立进行设计,
统输出矩阵。由于被控对象可观测,其中部分状态变量仍是可观测
的,故 ( A11 , A21 ) 仍是可观测对。
2. (n-q)维状态观测器的构成及分析设计
与全维状态观测器的构成方法相同,先构造式(9—341)的模拟
系统,利用状态观测器输出z与 zˆ 之差,通过反馈矩阵H负反馈至 x1
处来任意配置降维观测器极点,使 zˆ 尽快逼近Z,从而使
器存在条件。
由式(9-232)与式(9-229)可得
其解为
••
x− xˆ = ( A − HC)(x − xˆ)
(9-234)
x(t) − xˆ(t) = e(A−HC)(t−t0 ) x(t0 ) − xˆ(t0 )
(9-235)
显见当 xˆ(t0 ) = x(t0 )时,恒有 x(t) = xˆ(t) ,所引入的输出反馈并不起
故复合系统动态方程为
x•• xˆ
=
A HC
− BK x B A − BK − HCxˆ + Bv
(9-240a)
y = C
0
x xˆ
(9-240b)
不用状态估值 xˆ ,而用状态误差 (x − xˆ), 将会使分析研究更加直观
方便。由式(9—238)和式(9—239)可得
••
x− xˆ = ( A − HC)(x − xˆ)
(9-232)
式中 (A − HC)称为观测器系统矩阵。观测器分析设计的关键问题是
能否在任何初始条件下,即尽管 xˆ(t0 )与x(t0 ) 不同,但总能保证
lim(xˆ(t) − x(t)) = 0
(9-233)
t →
成立。只有满足式(9-233),状态反馈系统才能正常工作,式(9-
231)所示系统才能作为实际的状态观测器,故式(9-233)称为观测
按以上设计方法构成的 维观测器,称为龙伯格观测器。 图9—36 变换后的龙伯格观测器结构图
由于式中u为已知及 y 可测得,故v可看作 (n − q) 维子系统的输入
向量。令
•
z = y− A22 y − B 2u
(9-340)
z可看作 (n − q) 维子系统的输出向量,于是 (n − q)维子系统动态方
程为
•
x1 = A11 x1 + v, z = A21 x1
(9-341)
式中x1 为(n − q) 维子状态向量,A11为该子系统状态阵,A21为该子系
故有下述分离定理。
定理9-8(分离定理) 若被控系统 ( A, B,C)可控可观测,用状
态观测器估值形成状态反馈时,其系统的极点配置和观测器设计可
分别独立进行,即K和H阵的设计可分别独立进行。
五.降维状态观测器及其设计*
通常,输出变量是由状态变量的线性组合构成,若能设法经过线
性变换,使输出变量仅含单个独立的状态变量,则对于q维输出系
(9-331)
x 为把
分解为
x1和
x
2两部分,其中x
是q个直接由输出测得的状态变
2
量,引入非奇异线性变换
x = Q −1 x
(9-332)
其中
(n−q)行
D
Qnn
=
C
n行 q行
(9-333)
c为(q n)矩阵,D是使 Q非奇异的任意的 (n q) n矩阵。变换后Βιβλιοθήκη 被控系统动态方程为•
x = Ax + Bu,
问题:如何消除或减小 (xˆ − x) ,以便更好地用 xˆ 实现状态反馈?
分析:(xˆ − x)的存在必定导致 ( yˆ − y)的存在,而被控系统的输出量总
是可以用传感器测量的,于是可根据一般反馈控制原理,将 ( yˆ − y)
•
负反馈至 xˆ 处,控制 (yˆ − y) 尽快逼近于零,从而使 (xˆ − x) 尽快逼
应、噪声加剧等,通常希望观测器响应速度比状态反馈系统的响应
速度要快些。
例9-22 ver6p487 设被控对象传递函数为
Y (s) =
2
U (s) (s + 1)(s + 2)
试设计全维状态观测器,将极点配置在-10,-10。 解 被控对象的传递函数为
Y(s) =
2
=2
U (s) (s + 1)(s + 2) s 2 + 3s + 2
为此需要对引入观测器的状态反馈系统作进一步分析。整个系统
的结构图如图9-26所示,是一个2n维的复合系统,其中
u = v − Kxˆ
(9-237)
状态反馈子系统动态方程为
•
x = Ax + Bu = Ax − BKxˆ + Bv, y = Cx
全维状态观测器动态方程为
(9-238)
•
xˆ = Axˆ + Bu − H ( yˆ − y) = ( A − BK − HC)xˆ + HCx + Bv (9-239)
(9-241)
该式与u,v无关,即 (x, xˆ) 是不可控的,不管施加什么样的控制信
号,状态误差总会衰到零,这正是所希望的,是状态观测器所具有
的重要性质。
对式(9-240)引入非奇异线性变换
则有
x xˆ
=
In
I
n
0 x
−
I
n
x
−
xˆ
(9-242)
•
•
x
x−
• xˆ
=
A
− BK 0
➢ 用状态观测器实现的状态反馈方框图:
??
➢ 问题:1,如何观测(估计)状态 ? 2,部分状态可用传感器测量 …? 3,实际应用时:模型有误差(失配) 4,实际应用时:有不可测干扰 …? …?
➢全维状态观测器 当状态观测器估计的状态向量维数等于被控
对象状态向量的维数时,称为全维状态观测器。
➢降维状态观测器 当状态观测器估计的状态向量的维数小于被
根据传递函数可直接写出系统的可控标准型
•