画根轨迹例题
根轨迹例题——精选推荐

根轨迹例题题4-1 求下列各环传递函数所对应的负反馈系统根轨迹。
(1)2(2)()23g K K s W s s s +=++解1)起点:两个开环极点1211p p -=-+-=--。
终点:系统有一个 2 z -=-开环零点。
2)实轴上根轨迹区间为 (2]-∞-,。
3)渐近线计算由公式()()1118012 0,1,2,n mj i j i k n m p z n m μϕμσ==⎧+==⎪-⎪⎪⎨-⎪⎪-=-⎪-⎩∑∑ 求得根轨迹的渐近线倾角和渐近线与实轴的交点为180(12)18021μϕ+==-22021k σ--=-=- 4)求分离点,会合点 由'()()'()()0D s N s N s D s -=得223(2)(22)0s s s s ++-++=整理得2410s s ++=解得12s =--22s =-+。
由于实轴上的根轨迹在()2-∞,区间内,所以分离点应为12 3.7s =-≈-。
5)出射角计算由111180n m sc j i j i ββα-==⎛⎫=-- ⎪⎝⎭∑∑得()11809054.7144.7sc β=--=同理,2144.7sc β=- 。
根轨迹如图4-1所示。
图4-1 题4-1(1) 根轨迹图(2))22)(2()(2+++=s s s s K s W gK解1) 起点:系统四个开环极点为12340,2,1,1p p p j p j -=-=--=---=-+;终点:四个无限零点。
2) 渐近线计算由公式()()1118012 0,1,2,n mj i j i k n m p z n m μϕμσ==⎧+==⎪-⎪⎪⎨-⎪⎪-=-⎪-⎩∑∑求得根轨迹的渐近线倾角和渐近线与实轴的交点为180(12)451354o μϕ+==±± 、21114k σ+-=-=-+ 3) 分离点,会合点计算'()()'()()0D s N s N s D s -=整理得 3 (1)0s += 解得1,2,3 1s =- 4) 出射角计算由111180n m sc j i j i ββα-==⎛⎫=-- ⎪⎝⎭∑∑得()1180901354590sc β=-++=-同理,290sc β=+ 。
第四章 根轨迹法 习题
第四章 根轨迹法4-1试粗略画出对应反馈控制系统具有以下前向和反馈传递函数的根轨迹图: ()()()()s s H s s s K s G 6.01,01.01.02+=++=4-2 试粗略地画出反馈系统函数 ()()()()2411+-+=s s s Ks G 的根轨迹。
4-3 对应负反馈控制系统,其前向和反馈传递函数为 ()()()()1,42)1(2=+++=s H s s s s K s G 试粗略地画出系统的根轨迹。
4-4 对应正反馈重做习题4-3,试问从你的结果中得出什么结论?4-5 试画出具有以下前向和反馈传递函数的,正反馈系统根轨迹的粗略图。
()()()()1,4122=++=s H s s Ks G4-6 试确定反馈系统开环传递函数为 ()()()()()5284)2(2+++++=s s s s s s K s H s G 对应-∞<K<∞的根轨迹。
指明所有根轨迹上的相应特征。
4-7 设一负反馈系统,其开环传递函数 ()()()()()90020040)4(2++++=s s s s s K s H s G a) 画出根轨迹并表明根轨迹上全部特征值。
b) 增益值在一个什么样的范围内,系统才是稳定的? c) 画出系统的伯德图,并使其稳定性和不稳定性区域,与根轨迹图连系起来说明。
4-8 对应负反馈情况,重做习题4-7.4-9 对应如下的负反馈控制系统,粗略地作出根轨迹,并确定系统稳定下K 的范围。
()()()()1,41)6(=+++=s H s s s s K s G4-10 对应习题4-10图所示系统,根据以下条件,试确定导致系统稳定的正实数增益K 的范围:a) 具有负反馈的系统。
b) 具有正反馈的系统。
习题4-10图4-11 已知反馈系统的开环传递函数*()()(1)(2)K G s H s s s s =++ 试绘制系统的根轨迹图,详细列写根轨迹的计算过程,其中包括零点、极点、渐近线及与实轴交点,根轨迹分离点及与虚轴的交点、渐近线与实轴夹角。
自动控制原理之根轨迹图

* c
5
,
* 令 s j , 并 将 K * K c 5代 入 辅 助 方 程 可 求 出 c 1 。系统的根轨迹如图4-13所示。
2 1 .5 1 0 .5
p3
Kc 5
*
Байду номын сангаас
0
p2 p1
j
0 – 0 .5 –1 – 1 .5 –2 –3 –2
p4
–1
0
1
2
图4-13 例4-9系统的根轨迹图
a nm 40 1
渐近线与实轴正方向的交角为
2 k 1 a π n m
当k = 0时, 当k = 1时, 当k = 2时, 当k = 3时,
a
π 4 3π 4
45
a
135
a
a
5π 4 7π
4
135
45
⑸由规则五可求出根轨迹与实轴的交点(分离点)。 分离点方程是
4 3
3
⑺ 该系统为4阶系统,用解析法求根轨迹与虚轴的 * 交点 c 和对应的开环根轨迹增益的临界值 K c 比较困 * 难。下面采用劳斯判据求出 c 和 K c 的值。 根据系统的特征方程列出劳斯表如下:
s
4
1 4 5
20 4 K 5
*
6K 4
K
*
*
s 2 s
s
1
3
0 0
0
s
0
K
*
令劳斯表中s1 行的首项系数为零,求得 K 2 * 2 由 s 行系数写出辅助方程为 5s K 0
s 4s 6s 4s K 0
4 3 2 *
由规则二知,该系统的根轨迹共有4条分支(n=4),4条根 轨迹连续且对称于实轴。 ⑶由规则三知,实轴上的根轨迹是实轴上由0到-2的线 段。
根轨迹绘制例题

Im 4
2 三重 极点 -4 -2 0 -2 Re
-6.65 -6
-4
2.当-∞≤kg≤0时,绘制0o等相角根轨迹。
实轴上的根轨迹区间为:[-3,-1]和[0,+∞) 渐近线:开环极点数-开环零点数=1,则该根轨迹有一条 渐进线。渐进线的倾角为: 2k 0 nm 分离(会合)点:计算方法如1。s=-6.65不在根轨迹上, 应该舍去。 s=-1.35是会合点。
实轴上的根轨迹区间为: [-4,0]
根轨迹的渐近线:开环极点与开 环零点的数目相同,该根轨迹没有 渐进线。
z2
-4
p1
Im
116.57 1 Re 0
1
2
-3 -2 实轴上根轨迹
z1
-1
1
p2
-1
分离(会合)点:令 s4 kgs ' 2 1 N( s )2 s4 N (s )s 4 s 2 s 2 s2 2 ' D ( s ) s 2 s 2 D ( s )2 s 2 2 ' ' 代入方程 N 有: ( s ) D ( s ) N ( s ) D ( s ) 0 s 2 s 4 0
根轨迹与虚轴的交点:
2 1 k ) s ( 2 4 k ) s 2 0 系统的闭环特征方程为: ( g g
劳斯阵列如下: s2 1 kg 2
s1 2 4k g 0 s0 2 0 由于kg≥0,劳斯阵列中没有全为零的行。所以,根 轨迹与虚轴没有交点。根轨迹如下:
Im 1 -1.24 -4 -3 -2 -1 0 -1 Re
2 三重 极点 -4 -2 0 -2 Re
自动控制原理简明教程 第四章 根轨迹法 习题答案
方程求得。
k* 2 3 3
2
1
2 3 2 2 3 1
解得: k* 3(3 3)
1 3
特征根s=0处对应的 k * 值也利用模值方程求得:
k* 3 2 2 1
1
k*
4 3
满足稳定性时,k* 4 要使系统的三个根均为负
实根,则:
3
k* 4 3
0 k* 3(3 3) 1 3
0 k*
另一个闭环极点为 S3 ,则
(S S3 )(S 1)2 S (S 3)2 4
则解得:
(S S3 )(S 1)2 S (S 1)2 4(S 1)2 (S 4)(S 1)2
则 (S S3) S 4 S3 4 (另外一个闭环极点) 临界阻尼时的闭环传递函数为
(S)
(S
4(S 1) 4)(S 1)2
(2
j) (2 3
j)
4 3
渐近线与实轴正方向夹角
a
(2k 1)
nm
,
3
分离点: 1 1 1 0
d d 2 j d 2 j
整理得:3d 2 8d 5 0
解得:d1,2
8 6
2
d1 1 d2 1.67
分离角
l
180 l
180 2
900
把 S j 代入特征方程:
1
k*
n
m
a
i 1
Pi Zi
i 1
nm
(3) (3) 3
2
渐近线与实轴正方向夹角:
a
(2k 1)
nm
, ,
33
分离点: 1 1 1 0
d d 3 d 3
解得:d 1, a S (S 3)2 (1) 4 4
自动控制_根轨迹(例题)

n
m
n
m
nm
j 1
i 1
nm
这是与实轴交点为-,斜率为 tg
(2k 1) nm
是渐近线方程。渐近线与实轴的夹角(称为渐近线的倾斜角为
k 0,1,2
( 2k 1) 的直线方程。也就 nm
180
0
n m 1
nm 2
90 0
和
实轴上的会合点和分离点的求法
由此得: D( d ) K gd N ( d ) 0 ' ' D ( ) K N ( d ) 0 d gd 即:
N ' ( s ) D( s ) N ( s ) D ' ( s ) 0 D( s ) K gd N ( s) s d
二.根据相角条件确定根轨迹上的点
设某一系统的开环零极点如图,在S 平面中的任意一点 S0 ,用相角条件可
s0
O
× p2
以判断 S0 是不是根轨迹的点。
1、从 S0 到各零极点连直线
2、用量角器量 (s0 p1 ),…等各个角 3、将量好的值代入(**)式,若等
式成立,则 S0 就是根轨迹上的点
j 1 i 1 i
当 Kg= 0 时,有 s = pj ( j =1, 2, … , n) 上式说明Kg= 0时,闭环特征方程的根就是开环极点。
将特征方程改写为:
1 Kg
(s p ) (s z ) 0
j 1 j i 1 i
n
m
当 Kg 时,有
s = zi
( i =1, 2, … , m)
z1
o
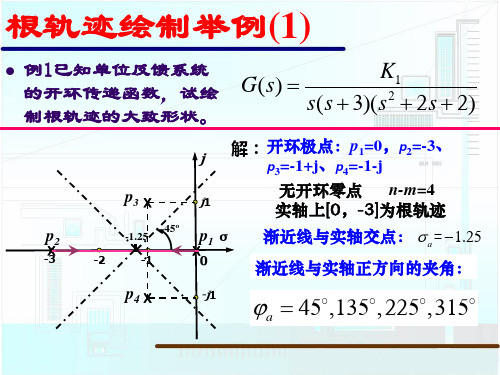
根轨迹绘制举例(1).
s3,4 j1.614 交点处的K1=2.34
根轨迹绘制举例(7)
常见的根轨 迹的形状
根轨迹绘制举例(8)
课堂练习1
根轨迹绘制举例(9)
课堂练习2 1.分别绘如下闭环系统的 根轨迹的大致形状。
K1 G( s) H ( s) 2 s[( s 4) 1]
分离点(或会合点):
K1 s3 8s2 3s
K1 0 s
与虚轴交点:
D(s) s3 8s2 32s K1 0 临界K1=256
d=-2.67j1.89 !舍去
将K1=256、s=j代入D(s)=0 =5.66
G( s) H ( s)
K1 s[( s 3) 2 3]
G( s ) H ( s )
3 K ( s 2) s( s 3)( s 2 2 s 2)
s 4 5s3 8s 2 (6 K1 ) s 2 K1 0
50 K1 6 K 0 K1 3K 7.02 1 34 K1 1 2 8 (6 K ) 1 s 2 K1 0 5
(2k 1)180 nm
出射角
(2k 1)+ (p j z i ) (p j p i ) 1 2=
i 1 i 1 i j m n
2
90
与虚轴交点: D(s) s2 K1 (s 1) 0
s2 s s0
1
分离点(或会合点):
分离点(或会合点):
K1 s3 8s2 17s
K1 0 s
d1 1.465
d2 3.865
n-m=3 负实轴为根轨迹 渐近线
自动控制理论例题集锦-第4章

以行列辅助方程 根据以上所计算根轨迹参数,绘制根轨迹如图4-3所示。
图4-3
例4 已知系统的开环传递函数为
1. 绘制时系统的根轨迹图。确定闭环共轭复数极点具有阻尼比时的
闭环传递函数。
2. 绘制时系统的根轨迹图。确定系统输出无衰减振荡分量时的闭环
传递函数。Leabharlann 解:1. 绘制时系统的根轨迹图。
系统的开环传递函数为
根据以上所计算根轨迹参数,绘制根轨迹如图4-1所示。
2. 确定的取值范围。
与分离点相应的可由模值条件求得
由如图4-1可知,使系统的阶跃响应呈现衰减振荡形式的的取值范
围为。
图4-1
解:
系统的开环传递函数为 1. 系统有三个开环极点:,没有开环零点。将开环零、极点标在平 面上。
2. 根轨迹的分支数。 特征方程为三阶,故有三条根轨迹分支。3条根轨迹分支分别起始 于开环极点,,终止于开环无限零点。 3. 实轴上的根轨迹。 实轴上的根轨迹为整个负实轴。 4. 渐近线的位置与方向。 渐近线与实轴的交点 渐近线与正实轴的夹角 5. 分离点和分离角。 根据分离点公式 解得,不在根轨迹上,故无分离点。 6. 根轨迹的起始角。 7. 与虚轴的交点。 将代入系统闭环特征方程 实部、虚部为零 解得;。 根据以上所计算根轨迹参数,绘制根轨迹如图4-2所示。
渐近线与正实轴的夹角 ⑤ 分离点。 解得。因为在实轴的根轨迹区段上,故是分离点。是否为分离点, 应看其是否满足相角条件。 可见满足相角条件,故是分离点。同样也是分离点。 ⑥ 根轨迹的起始角。 ⑦ 与虚轴的交点。 系统闭环特征方程为 列写劳斯表 令,解得。 以行列辅助方程 根据以上所计算根轨迹参数,绘制根轨迹如图4-6所示。 由图4-7所示所示根轨迹知当时,闭环极点均位于左半平面,系统 稳定。 2. 由图可见,在整个从0→∞的根轨迹上,对于为任何值时,没有 四个闭环极点均为实数的情况,故该系统不存在不振荡的单调运动过 程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018/8/11
( 2k 1)180o 45o , 135o 4 0 3 1 j 1 j 1.25 4
1
(3)分离点
1 1 1 1 0 d d 3 d 1 j d 1 j
K* G( s) H ( s) s( s 3)(s 2 2s 2) K * ( s 4 5 s 3 8 s 2 6 s ) dK * ds
s d
,
D( s ) 1 G ( s ) H ( s ) 0
s ( s 3)(s 2 2s 2) K * s 4 5s 3 8s 2 6s K * 0
0 4d 3 15d 2 16d 6 0
d 2.3
(4)起始角(出射角)
3
s1,2 j1.095
2018/8/11
j
j1.095
3 2.3
1
0
j1.095
2018/8/11
4
例
c 已知系统开环传函如下,试求出根轨迹与虚轴的交点 K c* 及相应的开环根轨迹增益的临界值 。 K* G(s) H(s) (s 1)(s 2) 1) l k 0,1
d3 2 2.45 j
分离角
d
l=2时,
900
j
K* 0
d2
K* 0 K* 0 900 0 90 d 0 -4 1 -2
d3
K* 0
(6)起始角
p (2k 1) ( z p p p )
p3 180o ( 1 j ) ( 1 j 3) 90o
180 (90 tg 1) tg
2018/8/11
o
o
1
1
1 90o 71.6 o 2
2
p4 71.6o
(5)与虚轴的交点
运用劳斯判据
D(s) 1 G(s) H (s) 0
p 90
4
0
p4
j
K* 0
0 90 d
2
K* 0
K* 0 900 0 90 d 0 -4 1 -2
d3
K* 0
900
(7)与虚轴的交点
s(s 4)(s2 4s 20) K * 0
用s=jω代入特征方程并令方程两边实部和虚部分别 相等:
4 36 2 K * (80 83 ) j 0
s4 s3 s s s0
2
D(s) s 4 5s 3 8s 2 6s K * 0
1 5
8 6
K*
6 8 K* 5 (204 25K * ) / 34 0 K*
由第一列、第四行元素为零
204 25K * 0
K * 8.16
由辅助方程
6 2 (8 )s 8.16 0 5
j
K* 0
K* 0
-4 -2
K* 0
0
K* 0
(5)分离点和分离角
1 1 1 1 0 d d 4 d 24 j d 24 j
经整理可得
(d 2)(d 2 4d 10) 0
求解上式可得三个分离点为
d1 2 d2 2 2.45 j
s 6s 11s K 6 0
3 2 *
令s=jω并代入特征方程得
jω3 6 ω2 j11ω K * 6 0
11ω ω3 0 其虚部和实部方程分别为 * 2 K 6 6 ω 0
ωc 11 * K c 60
解方程组得:
i
m
n
j 1
j i
j 1 j i
j i
复数极点p3和p4的起始角
p (2k 1) z
3
m
j 1
j pi
p j pi
j 1 j i
n
p3
j
(2k 1) (600 900 1200 ) 900
p2
-4
60
0
1200
0
p1
90 0
K* 0
900
K*
K*
4 36 2 K * 0
80 83 0
10
K * 3.25
j
K*
K* 0
0 90 d
K*
2
10 ( K * 3.25)
K* 0
K* 0 900 0 90 d 0 -4 1 -2
10 ( K * 3.25)
d3
j
K* 0
K* 0
-4
K* 0
0
K* 0
(4)渐近线:
渐近线在横轴上的公共交点为
nm 渐近线与横轴的夹角为
a
p z
i 1 i j 1
n
m
j
4 2 4 j 2 4 j 2 4
2k 1 a 4
k 0,1, 2,3
k取0、l、2、3时,分别为450、1350、2250、3150。
例5 设系统开环传递函数
G( s) H ( s) K* s( s 3)(s 2 2s 2)
试绘制闭环系统大致的根轨迹。 解(1)无开环零点,开环极点 在实轴上根轨迹[-3,0]。 p1 0 , p 2 3 , p3, 4 1 j (2)有4条分支趋向无穷远处。渐近线的夹角与交点
例 已知系统的开环传递函数如下试绘制该系统的根轨迹图。
K* G( s) H ( s) s( s 4)( s 2 4s 20)
解 ⑴根轨迹起始于开环极点p1=0、p2=-4、p3=-2+4j、 p4=-2-4j;终止于4个无限零点(没有有限零点)。 ⑵共有4个根轨迹分支,连续且对称于实轴。 ⑶实轴上的根轨迹是实轴上由0到-4的线段。