第1章 离散时间信号和系统
第一章 离散时间信号与系统
k =−∞
∑ δ (k )
n
u (n )
1
1
1
1 L n
-1
0
1
2
3
单位阶跃序列示意图
3. 矩形序列
• 矩形序列又称门函数序列,定义如下:
1 (0 ≤ n ≤ N −1) Rn (n) = 0 (n < 0 orn ≥ N) = u(n) −u(n − n0 )
R (n )
k
1
1
1
1
卷积和计算的步骤
•置换: z(n) →z(m) •翻转:x(m) ,z(m) →z(-m) 翻转: • 移位:z(-m) → z(n-m) 移位: •相乘:z(n-m) • x(m) (m值相同) 相乘: 相加: =∑ • 相加:y(n) =∑{z(n-m) • x(m)}
图解法举例
• 设两离散信号如图,求卷积和
四、用单位抽样序列表示 任意序列
• 任意序列都可以表示成单位抽样序列的加 ∞ 权和。 x(n) = ∑ x(m)δ (n − m)
m = −∞
x ( n) x(n)δ (n − m) = 0
m=n 其他
五、序列的能量
• 序列的能量为:序列各序列值的平方和:
∞
E=
n = −∞
∑ x ( n)
L
-1 0 1 2 k −1 k n
矩形序列示意图
4. 斜变序列
单位斜变序列R(n)可以看成是单位斜变信号 R(t)的抽样信号,如下图所示,表示为:
n R (n) = nu ( n) = 0
n
0
n<0
R (n) 2 1
3
L n -1 0 1 2 3
数字信号处理第一章

-1 0
1
2
n
1/4 -1 0 1 n
2012/11/3
大连海事大学信息学院电子信息基础教 研室
11
7、序列的时间尺度变换运算(2)
(2)插值: x(n/m)
例 m=2,x(n/2)相当于两个点之间插一个点,依此类 推。通常,插值用 I 倍表示,即插入(I-1)个值。
x(n) 2 1/2 -1
2012/11/3
大连海事大学信息学院电子信息基础教 研室
10
7、序列的时间尺度变换运算(1)
若序列为 x(n) ,其时间尺度变换序列为x(mn) 或x(n/m),m是正整数。 (1) 抽取: x(mn) 例m=2,x(2n)相当于两个点取一点,依此类推。
x(n) 2 1/4 -2 1/2 1 1 3 x(2n) 3
2012/11/3
大连海事大学信息学院电子信息基础教 研室
23
•三、单位样值响应与零状态响应 定义:在零初始条件下,输入为单位样值 序列时系统的响应。
即 h(n) T [ (n)] 显然h(n)是系统对 (n)的零状态响应。
• 若已知h(n),则当任意输入x(n),响应为:
y ( n)
x(n) xa (nT ),
2012/11/3
n
n为整数
2
大连海事大学信息学院电子信息基础教 研室
2.
1) 2) 3)
序列的表示方法:
公式表示法; 图形表示法; 集合符号表示法:如果x(n)是通过观测得到的一组离散 数据,则其可以用集合符号表示。
例如:
x(n) x(0) x(-1) x(1) x(-2) x(2) n
当n=0时
x(n)*h(n)=1
离散时间信号、系统和Z变换

冲激信号的强度压缩到原信号的1/2。
第二章信号分析和处理基础
设时域离散系统的输入为x(n),经过规定的运算,系统输出序 列用 y(n) 表示。设运算关系用 T [· ] 表示,输出与输入之间关 系用下式表示:
y(n)=T[x(n)]
其框图如图所示:
在时域离散系统中,最重要的是线性时不变系统,因为很多物 理过程可用这类系统表征。
e j(ω +2πM)n= e jω n,
0 0
M=0,〒1,〒2…
复指数序列具有以2π为周期的周期性。
指数信号
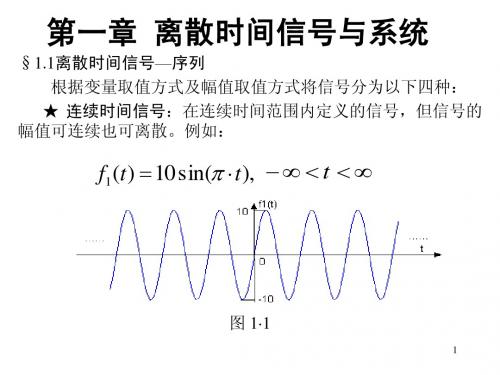
表达式:
f (t ) K e
直流(常数) 指数衰减
指数增长
t
f (t )
0
K
a0 a0 a0
0 0
O
t
重要特性:其对时间的微分和积分仍然是指数形式。
通常把 称为指数信号的时间常数,记作,代表 信号衰减速度,具有时间的量纲。
设输入为x1(n)和x2(n)时,输出分别为y1(n)和y2(n),即: T[ax1(n)] =3ax1(n)+4;
例2 已知f(t)的波形如图所示,试画出f(-3t-2)的波形
1.5 1 0.5 0 -4 1.5 1 0.5 0 -4 1.5 1 0.5 0 -4 1.5 1 0.5 0 -4
f(t)
-3
-2
-1
0 f(t-2)
1
2
3
4
-3
-2
-1
0
1 f(3t-2)
2
3
4
-3
-2
-1
0
1 f(-3t-2)
2
列就是时域离散信号。 实际信号处理中,这些数字序列值按顺序放在存贮器中,此时 nT 代表
数字信号处理第一章离散时间信号和离散时间
离散卷积的计算
计算它们的卷积的步骤如下: (1)折叠:先在哑变量坐标轴k上画出x(k)和h(k),将h(k)以纵坐标为对称轴折 叠成 h(-k)。 (2)移位:将h(-k)移位n,得h(n-k)。当n为正数时,右移n;当n为负数时,左 移n。 (3)相乘:将h(n-k)和x(k)的 对应取样值相乘。 (4)相加:把所有的乘积累加 起来,即得y(n)。
第一章 时域离散信号和时域离散系统
内容提要
离散时间信号和离散时间系统的基本概念 –序列的表示法和基本类型 –用卷积和表示的线性非移变系统 –讨论系统的稳定性和因果性问题 –线性常系数差分方程 –介绍描述系统的几个重要方式
离散时间信号的傅里叶变换和系统的频率响应 模拟信号的离散化
–讨论了模拟信号、取样信号和离散时间信号(数字 序列)的频谱之间的关系
根据线性系统的叠加性质 y(n) x(m)T[ (n m)] m
根据时不变性质:T[ (n m)] h(n m)
y(n) x(m)h(n m) x(n) h(n) m=-
(1.3.7)
通常把式(1.3.7)称为离散卷积或线性卷积。这一关系常用符 号“*”表示,即:
y(n n0 ) T[kx(n n0 )], 是移不变系统 (2) y(n) nx(n), 即y(n n0 ) (n n0 )x(n n0 ) 而T[x(n n0 )] nx(n n0 ) y(n n0 ),不是移不变系统
1.3.3 线性时不变系统及输入与输出的关系 既满足叠加原理,又满足非移变条件的系统,被称为线性 非移变系统。这类系统的一个重要特性,是它的输入与输 出序列之间存在着线性卷积关系。
§1. 2 时域离散信号
数字信号处理程佩青第三版课件(全套课件)

j0n
M 0, 1, 2
表明复指数序列具有以2为周期的周期性,在 以后的研究中,频率域只考虑一个周期就够了。
7. 周期序列
如果对所有n存在一个最小的正整数N,使下面等
式成立: x(n) x(n N)
则称x(n)为周期序列,最小周期为N。
例:
x(n) sin( n)
4
x(n) sin[ (n 8)],
4
N 8
一般正弦序列的周期性
设 x(n) Asin( 0n )
式中,A为幅度,ω0为数字域频率,为初相。
那么 x(n N ) Asin[ 0 (n N ) ] Asin( 0n 0N )
如果 x(n) x(n N)
则 Asin( 0n ) Asin[ 0 (n N) ]
N (2 /0 )k N,k均取整数
xa(t) 0
xa(nT)
t
2T
0
t
T
这里 n 取整数。对于不同的 n 值,xa(nT) 是 一个有序的数字序列,该数字序列就是离散时间信 号。注意,这里的n取整数,非整数时无定义,另 外,在数值上它等于信号的采样值,即
x(n) xa (nT ), n
离散时间信号的表示方法:公式表示法、图形 表示法、集合符号表示法,如
线性卷积的计算
y(n) x(m)h(n m) x(n) h(n) m
计算它们的卷积的步骤如下: (1)折叠:先在哑变量坐标轴k上画出x(k)和
h(k),将h(k)以纵坐标为对称轴折叠成 h(-k)。 (2)移位:将h(-k)移位n,得h(n-k)。当n为
正数时,右移n;当n为负数时,左移n。 (3)相乘:将h(n-k)和x(k)的对应取样值相乘。 (4)相加:把所有的乘积累加起来,即得y(n)。
第一章 离散时间信号与系统1
根据定义
n y ( n ) 1 ( 1 ) k , n 1 2 2 k 1 y ( n) 0, n 1
14
我们计算几个值,画出图形。显然,
n 2 n 1 n0 n 1 n2
y(2) 0
1 3 2 2 3 1 7 y(1) y(0) x(1) 2 4 4 7 1 15 y(2) y(1) x(2) 4 8 8
j 0 n
0 :复正弦的数字域频率 用欧拉公式将复指数序列展开: n n n x(n) e (cos0 n j sin 0 n) e cos0 n j e sin 0 n
用极坐标表示 其中 x(n)
x(n) x (n)
n
e
j arg[ x ( n )]
f2 (t )
0 1 1 0
, t 1 , 1 t 1 , 1 t 3 , t 3
定义域是连续的(-∞,∞),但是函数值只取-1,0,1三个离 散的值。(在间断点-1,1,3处一般不定义其函数值) f 以上两例中,1 (t ) 我们也称为模拟信号。
8
2 n , n 1 1 1 1 1 z (n) x(n) y(n) 2 ( 2 ) 2 3 , n 1 2 1 1 n 2 ( 2 ) n 1, n 0
图 1· 9 在求序列的和的时候要注意:相同序列 (n) 的序列值相加。
9
4.积(相乘) 两序列的积指相同序号 (n) 的序列值逐项对应相乘: z (n) x(n) y(n) 0.5, n 1 1.5, n 0 例1.1.4已知序列 x(n) = 1, n 1 求 y(n) x(n) 2 x(n) x(n 2) 0.5, n 2 0, n为其它值
第1章 离散时间信号与系统
h ( m) x ( n m)
m
m
a
n
u ( m) u ( n m)
am ,
m 0
对于 n 0,,
1 a n 1 u ( n) 1 a
28
第1章 离散时间信号与系统
离散卷积运算服从交换律、结合律和分配律。即
x(n) * h(n) h(n) * x(n)
2n, n 1 3 则 x ( n) y ( n) n 1 2, 2 ( n 1) n 1, n 0
如图1.1.8所示。
15
第1章 离散时间信号与系统
图1.1.8 两序列相加
16
第1章 离散时间信号与系统
4. 积
两序列之积是指它们同序号(n)的序列值逐项对应相 乘得到的一个新序列。
图1.1.9 例1.1.5的两个序列
18
第1章 离散时间信号与系统
1.1.3 序列的周期性
如果对所有n存在一个最小的正整数N,使x(n)满足
x(n) x(n N )
(1.1.8)
则称序列x(n)是周期序列,其周期为N。 下面讨论正弦序列的周期性 由于 则
x n Asin 0n
这时正弦序列就是周期序列,其周期满足 N (N,K必 须为整数)。具体可分以下三种情况:
0
2 k
(1)当 N 2 为整数时,只要k =1,N 就为最小正整 0 2 。 数,故正弦序列的周期即为 N
0
2
(2)当 2 不是整数,而是一个有理数时, k值逐步增 0 2 加,其取值使 N k 为最小整数,这就是正弦序列的 2 N 周期。此时 k ,其中k,N是互为素数的整数,
第一章 离散时间信号与系统3,4,5

1 h(0) h(1) (1) 0 a 1 h(1) h(0) (0) a 1 a 1 h(2) h(1) (1) a 2 a ┇ 1 h(n) h(n 1) a n a 0, n 0 ∴ h(n) a n u (n 1) h( n) n a , n 0 从上一节例题知道,此系统是非因果系统,当 a 1 时,系 统稳定。 同样道理,一个常系数线性差分方程相当于一个线性移不 变系统,同样取决于所选的边界条件,边就是说边界条件合适 时,一个常系数线性差分方程相当于一个线性移不变系统。例 如上面例题,边界条件为:
边界条件 y (0) 1,讨论此系统是否是线性移不变系统。 解:(1)令 x1 (n) (n) , y1 (0) 1 ←讨论 n 0 的情况 y1 (1) ay1 (0) x1 (1) a 则 y1 (2) ay1 (1) x1 (2) a 2
┇ y1 (n) ay1 (n 1) x1 (n) a n
在以后的讨论中,我们都假设常系数线性差分方程就代表线 性移不变系统,而且在大多数情况下,代表可实现的因果系统。 差分方程表示法的优点:可以直接得到系统的结构(将输入 变换成输出的运算结构,并非实际结构)例如: y(n) b0 x(n) a1 y(n 1) 方框图表示法如下:
§1.4连续时间信号及傅里叶级数 1.单位阶跃信号
1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章 思考题参考解答1.变化规律已知的信号称之为确定信号,反之,变化规律不确定的信号称之为随机信号。
以固定常数周期变化的信号称之为周期信号,否则称之为非周期信号。
函数随时间连续变化的信号称之为连续时间信号,也称之为模拟信号。
自变量取离散值变化的信号称之为离散时间信号。
离散信号幅值按照一定精度要求量化后所得信号称之为数字信号。
2.对于最高频率为f c 的非周期信号,选取f s =2f c 可以从采样点恢复原来的连续信号。
而对于最高频率为f c 的非周期信号,选取f s =2f c 一般不能从采样点恢复原来的连续信号的周期信号,通常采用远高于2f c 的采样频率才能从采样点恢复原来的周期连续信号。
3.被采样信号如果含有折叠频率以上的高频成分,或者含有干扰噪声,这些频率成分将不满足采样恢复定理的条件,必然产生频率混叠,导致无法恢复被采样信号。
4.线性时不变系统的单位脉冲响应h (n )满足n <0,h (n )=0,则系统是因果的。
若∞<=∑∞-∞=P n h n |)(|,则系统是稳定的。
5.ω表示数字角频率,Ω表示模拟角频率。
ω=ΩT (T 表示采样周期)。
6.不一定。
只有当周期信号的采样序列满足x (n )= x (n +N )时,才构成一个周期序列。
7.常系数差分方程描述的系统若满足叠加原理,则一定是线性时不变系统。
否则,常系数差分方程描述的系统不是线性时不变系统。
8.该说法错误。
需要增加采样和量化两道工序。
9.受采样频率、有限字长效应的约束,与模拟信号处理系统完全等效的数字系统不一定找得到。
因此,数字信号处理系统的分析方法是先对采样信号及系统进行分析,再考虑幅度量化及实现过程中有限字长效应所造成的影响。
故离散时间信号和系统理论是数字信号处理的理论基础。
10、只有当系统是线性时不变时,有y (n )= h (n )*x (n )。
11、时域采样在频域产生周期延拓效应。
12.输入信号x a (t )先通过一个前置低通模拟滤波器限制其最高频率在一定数值之内,使其满足采样频率定理的条件。
因此,该滤波器亦称为抗混叠滤波器。
经抗混叠滤波后的模拟信号,在采样和模/数(A/D)转换器中每间隔T (采样周期)采样的x a (t )的幅度一次,并将其量化为二进制数据。
即模拟信号x a (t )经A/D 转换为数字信号序列x (n )。
数字信号序列x (n )按照不同目的要求在DSP 中进行加工处理后,转化为输出序列y (n )。
输出序列y (n )经数/模(D/A)转换为阶梯模拟信号y a (t ),y a (t )又经过低通滤波器滤除其高频成分,使阶梯信号得到平滑后,得到所需要的模拟信号y (t )。
故这里的低通滤波器又称之为平滑滤波器。
第1章 练习题参考答案1.解:序列h (n )可用单位脉冲序列δ(n )及其加权和表示为- 2 - ∑∑=-=-=-=61)(8.0)()(m mN m m m n m n a n h δδ 其中⎩⎨⎧≠==-时当时当m n m n m n ,0,1)(δ用图形表示该序列如图1所示。
图1 序列h (n )的图形表示2.解:(1)x (n )的波形如图2(a)所示。
(2) x (n )=-3δ(n +4)-δ(n +3)+δ(n +2) +3δ(n +1) +6δ(n )+6δ(n -1)+6δ(n -2)+6δ(n -3) +6δ(n -4)(3) x 1(n )的波形是x (n )波形右移2位,再乘以2,画出图形如图2(b)所示。
x 2(n ) 的波形是x (n )波形左移2位,再乘以2,画出图形如图2(c)所示。
画x 3(n )时,先画x (-n )的波形(即将x (n )的波形以纵轴为中心轴翻转180º),然后再右移2位,x 3(n )波形如图2(d)所示。
(a) (b)(c) (d)图2 题2 解图3.解:(1)y (n )=x (n )*h (n )=R 4(n ),y (n )波形图如图3(a)所示。
(2)y (n )=x (n )*h (n )={1,2,3,2,1},y (n )波形图如图3(b)所示。
- 3 -(3)y (n )=x (n )*h (n )=δ(n -2)*0.5R 3(n )= 0.5n -2R 3(n -2),y (n )波形图如图3(c)所示。
(4)x (n )=2n u (-n -1),h (n )=0.5n u (n ),得n m mm n n y ---∞=-⨯==∑23125.0)(1,0≥n n nm m m n n y 23425.0)(⨯==∑-∞=-,1-≤ny (n )波形图如图3(d)所示。
(a) (b)(c) (d)图3 题3解图4.解:(1)x (n )是周期的,周期为14。
(2)x (n )是周期的,周期为6。
(3)x (n )是非周期的。
5.解:(1)系统y (n )=x (n )+2x (n -1)是线性时不变系统。
(2)系统y (n )=3x (n )+2是非线性时不变系统。
(3)系统 y (n )=x (n -1)是线性时不变系统。
事实上,该系统是延时单元。
(4)系统y (n )=x (- n )是线性时不变系统。
(5)系统y (n )=3x (n 2)是非线性时不变系统。
(6)系统y (n )=[x (n )]2是非线性时不变系统。
(7)系统y (n )=x (n )cos(ωn )是线性时变系统。
(8)系统∑-∞==nm m x n y )()(是线性时变系统。
6.解:解法(1):图解法。
图解法的过程如图4所示。
- 4 -图4 题7解图解法(2):解析法。
y (n )=2δ(n +2) + δ(n +1)+6.5δ(n )+ δ(n -1)+0.5δ(n -2)+3.5δ(n -3)+2δ(n -4)+δ(n -5) 7.解:(1)系统是线性非时不变的。
(2)系统是线性时变的。
(3)系统是线性时不变的系统。
(4)系统是非线性时不变的系统。
8.解:(1)是因果稳定的。
(2)系统是因果稳定的。
(3)是因果不稳定的。
(4)是非因果不稳定的。
(5)系统是因果稳定的。
(6)是非因果不稳定的。
(7)系统是非因果稳定的。
9.解:由题意和卷积公式a a a n y nm m-==-∞-∞=-∑1)(, n <-1a aa n y m m -==∑--∞=-1)(1, n ≥-110.证明:(1)因为- 5 -x (n )*h (n )=)()(m n h m x m -∑∞-∞=令m ’=n -m ,则x (n )*h (n )= )()(m h m n x m ''-∑∞-∞==h (n ) *x (n )(2) x (n )*[ h 1(n ) + h 2(n )]=)]()()[(21m n h m n h m x m -+-∑∞-∞==)()(1m n h m x m -∑∞-∞=+)()(2m n h m x m -∑∞-∞== x (n )* h 1(n )+ x (n )* h 2(n )(3)利用上面已证明的结果,得到x (n )*[ h 1(n ) * h 2(n )]= x (n )*[ h 2(n ) *h 1(n )][])(*)()()(122m n h m n h m x k h m k --=∑∑∞-∞=∞-∞=[]∑∑∞-∞=∞-∞=--=k m k m n h k h m x )(*)()(12变换求和号的次序,得到x (n )*[ h 1(n ) * h 2(n )]= )()()(12k m n h m x k h m k --∑∑∞-∞=∞-∞==)](*)([)(12k n h k n x k h k --∑∞-∞== h 2(n ) * [x (n )* h 1(n )] =[x (n )* h 1(n )] * h 2(n )11.解:(1) )()1()21()(1n n u n h n δ+-=- (2) y (n )==)1(21)21(----n u e ej nnj ωω+)(n u e n j ω 12.解:y (n )=∑-∞=-nm m n m x 3.013.答:根据奈奎斯特定理,因为x a 1(t )=cos2πt ,而频谱中最高角频率πππ32621=<=a Ω,所以y a 1(t )无失真。
因为x a 2(t )=cos5πt ,而频谱中最高角频率πππ32652=>=a Ω,所以y a 2(t )失真。
14.解:(1) x a (t )的周期是s fT a 01.01==(2)设采样周期为原采样周期的一半,即T =0.0025s ,则采样信号)(ˆnT xa 为 )(ˆnT xa ∑∞-∞=-+=n n t n )005.0()22cos(δππ 此时相应的脉冲频率4000025.011===T f s (Hz)- 6 - 采样序列)(ˆnT xa 的图形如图5所示。
图5题13解图 T =0.0025s 时采样信号x a (t )的采样信号)(ˆnT xa (3)脉冲时间间隔应为T =1/f =1/200=0.005s 15、解:(1) x a (t )的周期是05.02011===f T s (2) x a (nT )=∑∑∑∞-∞=∞-∞=∞-∞=+=-+=-+n n n n nT t nT nT t fnT )2/8.0cos()()40cos()()2cos(ππδϕπδϕπ(3) x a (nT )=x (n )=cos(0.8πn +π/2),其数字频率为ω=0.8πrad ,2π/ω=5/2,周期为N =5。
x a (nT )的波形如图6所示。
图6 x a (nT )的波形16、解:(1)按照采样定理,F smin =2×f 2=60kHz 。
(2) x (n )的最高频率是rad 6.0/22max ππω==s F f 。
(3) 采样频率F s =10kHz 时x (n )= x a (t )|t =nT = cos(2πf 1nT +φ1)+cos(2πf 2nT +φ2) = cos(0.4πn +φ1)+cos(0.6πn +φ2)17、解:(1) ∑∑∞-∞=∞-∞=-+=-+=n n nT n n n nT n nT nT t x)()]25.0cos()5.0[cos()()]5cos()2[cos()(ˆδππδππ (2) 理想低通滤波器的幅频特性如图7(a)所示。
而)(ˆt x 的频谱)(ˆωj e X 如图7(b)所示,)(ˆt x的两个余弦信号频谱分别在±0.5π和±1.25π的位置,并且以2π为周期进行周期性延拓。