雷达侦察作用距离与截获概率51侦察系统的灵敏度-Read
雷达侦察作用距离(本科)
切线信号灵敏度PTSS和工作灵敏度POPS定义
在输入脉冲功率电平作用下,接收机输出端 脉冲与噪声叠加后信号的底部与基线噪声( 只有接收机内噪声时)的顶部在一条直线上( 相切),则称此输入脉冲信号功率为切线信号 灵敏度PTSS。
当输入信号处 于切线电平时, 接收机输出端 视频信号与噪 声的功率比约 为8dB。
修正的侦察方程
(1)雷达发射机到雷达发射天线间的馈线损耗L1≈3.5dB; (2)雷达发射天线波束非矩形损失L2≈1.6~2dB; (3)侦察天线波束非矩形损失L3≈1.6~2dB; (4)侦察天线增益频带内变化所引起损失L4≈2~3dB;
(5)侦察天线与雷达信号极化失配损失L5≈3dB;
(6)从侦察天线到接收机输入端的馈线损耗L6≈3dB
工作灵敏度POPS的定义为:接收机输入端在 脉冲信号作用下,其视频输出端信号与噪声 的功率比为14dB时,输入脉冲信号功率为接 收机工作灵敏度POPS。 工作灵敏度的换算 PTSS+3dB 平方律检波 POPS= PTSS+6dB 线性检波
5.2 侦察作用距离
简化的侦察方程
假设侦察机和雷达的空间位置如图5―5所示,雷 达的发射功率为Pt,天线的增益为Gt,雷达与侦察 机之间的距离为R,当雷达与侦察天线都以最大增 益方向互指。
2 PG t t Rr 2 0.1L (4 ) P 10 r min 1 2
侦察的直视距离
在微波频段以上,电波是近似直线传播的,地球表面 的弯曲对传播有遮蔽, 侦察机与雷达间的直视距离 受到限制。假设雷达天线和侦察天线高度分别为 Ha,Hr, R为地球半径, 直视距离为
侦察接收天线收到的雷达信号功率
低截获概率雷达
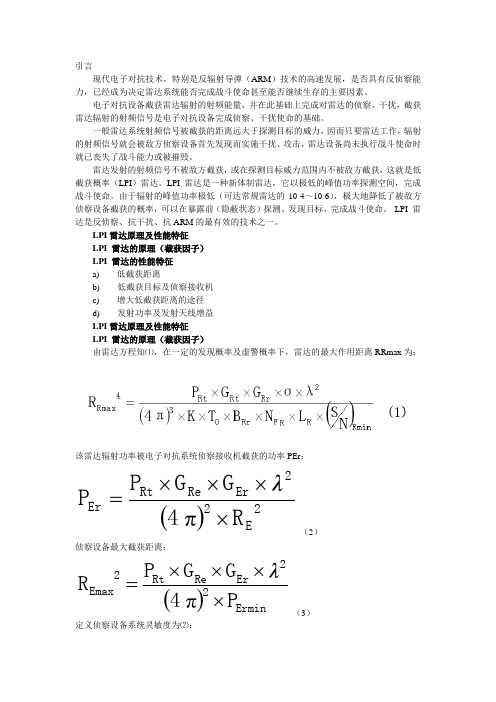
引言现代电子对抗技术,特别是反辐射导弹(ARM )技术的高速发展,是否具有反侦察能力,已经成为决定雷达系统能否完成战斗使命甚至能否继续生存的主要因素。
电子对抗设备截获雷达辐射的射频能量,并在此基础上完成对雷达的侦察、干扰,截获雷达辐射的射频信号是电子对抗设备完成侦察、干扰使命的基础。
一般雷达系统射频信号被截获的距离远大于探测目标的威力,因而只要雷达工作,辐射的射频信号就会被敌方侦察设备首先发现而实施干扰、攻击,雷达设备尚未执行战斗使命时就已丧失了战斗能力或被摧毁。
雷达发射的射频信号不被敌方截获,或在探测目标威力范围内不被敌方截获,这就是低截获概率(LPI )雷达。
LPI 雷达是一种新体制雷达,它以极低的峰值功率探测空间,完成战斗使命。
由于辐射的峰值功率极低(可达常规雷达的10-4~10-6),极大地降低了被敌方侦察设备截获的概率,可以在暴露前(隐蔽状态)探测、发现目标,完成战斗使命。
LPI 雷达是反侦察、抗干扰、抗ARM 的最有效的技术之一。
LPI 雷达原理及性能特征LPI 雷达的原理(截获因子) LPI 雷达的性能特征 a) 低截获距离b) 低截获目标及侦察接收机 c) 增大低截获距离的途径 d) 发射功率及发射天线增益 LPI 雷达原理及性能特征LPI 雷达的原理(截获因子)由雷达方程知⑴,在一定的发现概率及虚警概率下,雷达的最大作用距离RRmax 为:该雷达辐射功率被电子对抗系统侦察接收机截获的功率PEr :()2E22Er Re Rt Er R 4πλG G P P ⨯⨯⨯⨯=(2)侦察设备最大截获距离:()Ermin22Er Re Rt 2EmaxP 4πλG G P R ⨯⨯⨯⨯=(3)定义侦察设备系统灵敏度为⑵:ErErminE G P S =(4)相应地定义雷达系统灵敏度为:()RrRminR R F Rr 0R G N SL N B T K S ⨯⨯⨯⨯⨯=(5)将式(4)、(5)代入(1)中,雷达的最大作用距离RRmax 可写为:()R32Rt Rt 4RmaxS 4πλσG P R ⨯⨯⨯⨯=(6)同样,侦察设备最大截获距离可写为:()ES 4πλG P R 22Re Rt 2Emax⨯⨯⨯= (7)由(6)、(7)式得:2Rmax Rt E Re RmaxEmax R σG S G 4πR R ⨯⨯⨯⨯⨯=⎪⎪⎭⎫ ⎝⎛R S 2定义 为截获因子,并考虑到在时,有:RtReGG = RmaxEmax PR R C =σR S S 4πC 2RmaxE R 2P⨯⨯=(8)当CP <1时,截获距离小于雷达对目标的探测距离,这时雷达工作在低截获状态。
舰载雷达探测误差传递与灵敏度分析-数据采集与处理
收稿日期:2011-07-10;修回日期:。
基金项目:国家重点基础研究发展计划(973计划)(613101)资助课题 作者简介:潘江怀(1982-),男,工程师,硕士,主要研究方向为信息融合,空间配准。
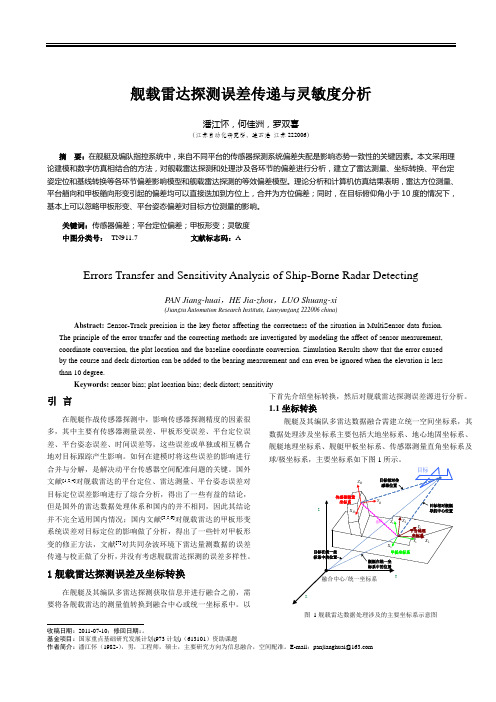
E-mail :panjianghuai@舰载雷达探测误差传递与灵敏度分析潘江怀,何佳洲,罗双喜(江苏自动化研究所,连云港 江苏222006)摘 要:在舰艇及编队指控系统中,来自不同平台的传感器探测系统偏差失配是影响态势一致性的关键因素。
本文采用理论建模和数字仿真相结合的方法,对舰载雷达探测和处理涉及各环节的偏差进行分析,建立了雷达测量、坐标转换、平台定姿定位和基线转换等各环节偏差影响模型和舰载雷达探测的等效偏差模型。
理论分析和计算机仿真结果表明,雷达方位测量、平台艏向和甲板艏向形变引起的偏差均可以直接迭加到方位上,合并为方位偏差;同时,在目标俯仰角小于10度的情况下,基本上可以忽略甲板形变、平台姿态偏差对目标方位测量的影响。
关键词:传感器偏差;平台定位偏差;甲板形变;灵敏度 中图分类号: TN911.7 文献标志码:AErrors Transfer and Sensitivity Analysis of Ship-Borne Radar DetectingP AN Jiang-huai ,HE Jia-zhou ,LUO Shuang-xi(Jiangsu Automation Research Institute, Lianyungang 222006 china)Abstract: Sensor-Track precision is the key factor affecting the correctness of the situation in MultiSensor data fusion. The principle of the error transfer and the correcting methods are investigated by modeling the affect of sensor measurement, coordinate conversion, the plat location and the baseline coordinate conversion. Simulation Results show that the error caused by the course and deck distortion can be added to the bearing measurement and can even be ignored when the elevation is less than 10 degree.Keywords: sensor bias; plat location bias; deck distort; sensitivity引 言在舰艇作战传感器探测中,影响传感器探测精度的因素很多,其中主要有传感器测量误差、甲板形变误差、平台定位误差、平台姿态误差、时间误差等,这些误差或单独或相互耦合地对目标跟踪产生影响。
雷达被截获距离的等效试验方法研究

雷达与导航雷达被截获距离的等效试验方法研究鄢曾小东(中国电子科技集团公司第十研究所,四川成都610036)摘要:针对雷达在对抗特定的ESM侦察设备时被截获距离难以直接测试的问题,研究了雷达被ESM侦察设备截获距离的等效试验方法。
首先,推导了期望试验条件和替代试验条件下被截获距离的等效模型。
然后,针对不同的试验场景,将等效模型细分为四种不同的类型。
最后,通过某型雷达被截获距离外场试飞的实测数据对等效模型进行了验证。
试验结果表明等效模型的误差为7.26%,满足试验大纲误差小于10%的要求。
关键词:雷达;ESM侦察设备;被截获距离;等效模型中图分类号:TN957文献标识码:A DOI:10.16157/j.issn.0258-7998.200882中文引用格式:曾小东.雷达被截获距离的等效试验方法研究[J].电子技术应用,2021,47(3):111-114.英文弓I用格式:Zeng Xiaodong.The research of radar intercepted distance by equivalent test[J].Application of Electronic Technique, 202147(3):111-114.The research of radar intercepted distance by equivalent testZeng Xiaodong(The10th Research Institute of China Electronics Technology Group Corporation,Chengdu610036,China)Abstract:Aiming at the problem that it is difficult to directly test the intercepted distance between radar and specific ESM reconnaissance equipment,the equivalent test method of radar intercepted distance by ESM reconnaissance equipment is studied.Firstly, the equivalent model of intercepted distance under the expected test condition and the substitute test condition is deduced.Then, according to different test scenarios,the equivalent model is subdivided into four different types.Finally,the equivalent model is verified by the measured data.The data is from the intercepted distance of a certain radar in the outfield flight test.The test results show that the error o f the equivalent model is7.26%,which meets the requirement that the error of the test outline is less than10%.Key words:radar;ESM reconnaissance equipment;intercepted distance;equivalent model0引言雷达被ESM侦察设备截获距离试验是考核鉴定雷达低截获性能的重要试验内容之一[1勺。
雷达侦察作用距离与截获概率
Gr 2
m in10 0.1L
1/ 2
3. 侦察的距离优势
侦察视距
A
B
C
Hr
Ha
R
RSR 4.1( H a H r )
侦察作用距离:
Rr
Pt Gt Gr 2 (4 ) 2 Pr min
1/ 2
雷达作用距离:
优势:
Ra
Pt
(4
Gt2 2
3)检波前增益不足
此时无射频放大器或者射频放大器增益不足。 因子 Afv 很大,灵敏度计算可以近似为:
当fGVR2 FR2 fR 2fV 时,
PTSS
114dBm FR
10 lg3.1f
R2.5
Af v
G
2 R
FR2
当 fR 2fV时
PTSS
PTSS
114dBm
FR
10 lg3.1f
R2.5
2f R fV
fV2
1.5f
2 R
Af v
G
2 R
FR2
上式中fR 和 fV以MHz为单位,FR以dB为单位。
2) fR 2fV
此时射频带宽比视频带宽大,为宽带接收机的情 况。采用平方率检波器时,信号切线灵敏度为
第5章 雷达侦察作用距离与截获概率
5.1 侦察系统的灵敏度 5.2 侦察作用距离 5.3 侦察截获概率与截获时间
5.1 侦察系统的灵敏度
1. 灵敏度定义 1) 切线信号灵敏度 在某个输入脉冲功率电平作用下,接收机输出端脉冲与 噪声叠加后信号的底部与接收机内部的基线噪声的顶部 在一条线上相切,称此时的输入信号功率为切线信号灵 敏度PTSS。如图示当
大学_《雷达对抗原理》(赵国庆著)课后答案免费下载_1
《雷达对抗原理》(赵国庆著)课后答案免费下载《雷达对抗原理》(赵国庆著)内容提要第1章雷达对抗概述1.1 雷达对抗的基本概念及含义1.1.1 雷达对抗的含义及重要性1.1.2 雷达对抗的基本原理及主要技术特点1.1.3 雷达对抗与电子战1.2 雷达对抗的信号环境1.2.1 现代雷达对抗信号环境的特点1.2.2 信号环境在雷达对抗设备中的描述和参数1.3 雷达侦察概述1.3.1 雷达侦察的任务与分类1.3.2 雷达侦察的技术特点1.3.3 雷达侦察设备的基本组成1.4 雷达干扰概述1.4.1 雷达干扰技术的分类1.4.2 雷达干扰设备的基本组成习题一参考文献第2章雷达信号频率的测量2.1 概述2.1.1 雷达信号频率测量的重要性2.1.2 测频系统的主要技术指标2.1.3 现代测频技术分类2.2 频率搜索接收机2.2.1 搜索式超外差接收机2.2.2 射频调谐晶体视频接收机2.2.3 频率搜索形式2.2.4 频率搜索速度的选择2.3 比相法瞬时测频接收机2.3.1 微波鉴相器2.3.2 极性量化器的基本工原理2.3.3 多路鉴相器的并行运用2.3.4 对同时到达信号的分析与检测2.3.5 测频误差分析2.3.6 比相法瞬时测频接收机的组成及主要技术参数 2.4 信道化接收机2.4.1 基本工作原理2.4.2 信道化接收机存在的问题2.4.3 信道化接收机的特点和应用 2.5 压缩接收机2.5.1 Chirp变换原理2.5.2 表声波压缩接收机的工作原理 2.5.3 压缩接收机的参数2.6 声光接收机2.6.1 声光调制器2.6.2 空域傅立叶变换原理2.6.3 声光接收机的工作原理2.6.4 声光接收机的主要特点习题二参考文献 ?第3章雷达的方向测量和定位3.1 概述3.1.1 测向的目的3.1.2 测向的方法3.1.3 测向系统的主要技术指标3.2 振幅法测向3.2.1 波束搜索法测向技术3.2.2 全向振幅单脉冲测向技术3.2.3 多波束测向技术3.3 相位法测向3.3.1 数字式相位干涉仪测向技术3.3.2 线性相位多模圆阵测向技术3.4 对雷达的定位3.4.1 单点定位3.4.2 多点定位习题三参考文献 ?第4章雷达侦察的信号处理4.1 概述4.1.1 信号处理的任务和主要技术要求 4.1.2 信号处理的基本流程和工作原理 4.2 对雷达信号时域参数的'测量4.2.1 tTOA的测量4.2.2 PW的测量4.2.3?AP的测量4.3 雷达侦察信号的预处理4.3.1 对已知雷达信号的预处理4.3.2 对未知信号的预处理4.4 对雷达信号的主处理4.4.1 对已知雷达信号的主处理4.4.2 对未知雷达信号的主处理4.5 数字接收机和数字信号处理4.5.1 数字接收机4.5.2 数字测频4.5.3 数字测向4.5.4 信号脉内调制的分析习题四参考文献 ?第5章雷达侦察作用距离与截获概率5.1 侦察系统的灵敏度5.1.1 切线信号灵敏度PTSS和工作灵敏度POPS的定义 5.1.2 切线信号灵敏度PTSS的分析计算5.1.3 工作灵敏度的换算5.2 侦察作用距离5.2.1 简化侦察方程5.2.2 修正侦察方程5.2.3 侦察的直视距离5.2.4 侦察作用距离Rr对雷达作用距离Ra的优势 5.2.5 对雷达旁瓣信号的侦察5.3 侦察截获概率与截获时间5.3.1 前端的截获概率和截获时间5.3.2 系统截获概率和截获时间习题五参考文献第6章遮盖性干扰6.1 概述6.1.1 遮盖性干扰的作用和分类6.1.2 遮盖性干扰的效果度量6.1.3 最佳遮盖干扰波形6.2 射频噪声干扰6.2.1 射频噪声干扰对雷达接收机的作用6.2.2 射频噪声干扰对信号检测的影响6.3 噪声调幅干扰6.3.1 噪声调幅干扰的统计特性6.3.2 噪声调幅干扰对雷达接收机的作用 6.3.3 噪声调幅干扰对信号检测的影响 6.4 噪声调频干扰6.4.1 噪声调频干扰的统计特性6.4.2 噪声调频干扰对雷达接收机的作用 6.4.3 噪声调频干扰对信号检测的影响 6.5 噪声调相干扰6.5.1 噪声调相干扰的统计特性6.5.2 影响噪声调相干扰信号效果的因素 6.6 脉冲干扰习题六参考文献第7章欺骗性干扰7.1 概述7.1.1 欺骗性干扰的作用7.1.2 欺骗性干扰的分类7.1.3 欺骗性干扰的效果度量7.2 对雷达距离信息的欺骗7.2.1 雷达对目标距离信息的检测和跟踪7.2.2 对脉冲雷达距离信息的欺骗7.2.3 对连续波调频测距雷达距离信息的欺骗 7.3 对雷达角度信息的欺骗7.3.1 雷达对目标角度信息的检测和跟踪7.3.2 对圆锥扫描角度跟踪系统的干扰7.3.3 对线性扫描角度跟踪系统的干扰7.3.4 对单脉冲角度跟踪系统的干扰7.4 对雷达速度信息的欺骗7.4.1 雷达对目标速度信息的检测和跟踪7.4.2 对测速跟踪系统的干扰7.5 对跟踪雷达AGC电路的干扰7.5.1 跟踪雷达AGC电路7.5.2 对AGC控制系统的干扰习题七参考文献第8章干扰机构成及干扰能量计算8.1 干扰机的基本组成和主要性能要求8.1.1 干扰机的基本组成8.1.2 干扰机的主要性能要求8.2 干扰机的有效干扰空间8.2.1 干扰方程8.2.2 干扰机的时间计算8.3 干扰机的收发隔离和效果监视8.3.1 收发隔离8.3.2 效果监视8.4 射频信号存储技术8.4.1 模拟储频技术(ARFM)8.4.2 数字储频技术(DRFM)8.5 载频移频技术8.5.1 由行波管移相放大器构成的载频移频电路 8.5.2 由固态移相器构成的载频移频电路习题八参考文献第9章对雷达的无源对抗技术9.1 箔条干扰9.1.1 箔条干扰的一般特性9.1.2 箔条的有效反射面积9.1.3 箔条的频率响应9.1.4 箔条干扰的极化特性9.1.5 箔条回波信号的频谱9.1.6 箔条的战术应用9.2 反射器9.2.1 角反射器9.2.2 龙伯透镜反射器9.3 假目标和雷达诱饵9.3.1 带有发动机的假目标9.3.2 火箭式雷达诱饵9.3.3 投掷式雷达诱饵9.3.4 拖曳式雷达诱饵9.4 隐身技术习题九参考文献《雷达对抗原理》(赵国庆著)目录该书系统介绍了雷达对抗的基本原理,系统的组成,应用的主要技术等。
第4章 雷达侦察的信号处理
第4章 雷达侦察的信号处理
4.1.1 信号处理的任务和主要技术要求 雷达侦察系统中信号处理设备的主要任务是:对前
端输出的实时脉冲信号描述字流{PDWi}∞i=0进行信号分 选、参数估计、辐射源识别,并将对各辐射源检测、测 量和识别的结果提供给侦察系统中的显示、存储、记 录和其它有关设备。
雷达侦察系统前端输出的{PDWi}∞i=0的具体内容和 数据格式取决于侦察系统前端的组成和性能。在典型 的侦察系统中,
t T O A D m o d ( T , t , t ) |s U Ts ( t ) U T , 0 (4―3)
第4章 雷达侦察的信号处理
图 4―3
第4章 雷达侦察的信号处理
式中,Dmod(T,Δt,t)为求模、量化函数;Δt为时间计数
器的计数脉冲周期;T=Δt·2N为时间计数器的最大无模糊
第4章 雷达侦察的信号处理
图4―1 各种典型的雷达信号调制形式分类
第4章 雷达侦察的信号处理
2.可测量和估计的辐射源参数、参数范围和估计 精度
雷达侦察系统可测量和估计的辐射源参数包括由分 选后的脉冲描述字PDW中直接统计测量和估计的辐射 源参数,对PDW序列进行各种相关处理后统计测量和估 计的辐射源参数。这些参数的种类、范围和精度是与 雷达侦察系统的任务、用途密切相关的。典型雷达侦 察系统可测量和估计的辐射源参数、参数范围和估计 精度如表4―1所示。
第4章 雷达侦察的信号处理
由主处理单元按照对已知雷达信号的处理方法作
进一步的分选、识别和参数估计;然后再根据已知的一
般雷达信号特征的先验知识{Dk}nk=1,对剩余部分
{PDWi,k
}m k 1
再进行预分选,并由{Dk}nk=1的预分选产
机载相控阵火控雷达信号的截获概率分析_邵涛
Abstract: A irborne phased- ar ray fire- co ntr ol radar po ssesses the merits o f high- efficiency radio fr equency , mult-i functio n, hig h detection and tr acking capability , fo rming beams o f different shapes, high r eliabil-i ty, and etc. Accor ding to the sufficient condit ion o f r eco nnaissance interception, the paper firstly analyzes the system sensit ivity o f reconnaissance r eceiver needed by r eco nnaissance interception. O n the basis, the models of super po sitio n pro bability , detectio n probability and pulse- losing probability are built up r espectiv ely. F-i nally , the main facto rs t hat affect the pr obabilit ies ar e simulated and analy sed. T he simulation results indicate that reasonable config ur ing reconnaissance receiver , impro ving SNR , and decr easing the signal density of interio r can improv e the reliability of int ercepting air bo rne phased- ar ray fire- co ntr ol radar so as to make pr eparatio ns fo r efficient jamming .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 5章
雷达侦察作用距离与截获概率
式中,W0,PS0分别为检波器输入噪声的谱密度和输 入信号的功率,如图5 ― 4所示。由于该谱在f=ΔfR/2处不 连续,所以分析中对ΔfV≤ΔfR≤2ΔfV和ΔfR≥2ΔfV的情况分别 进行讨论。
第 5章
雷达侦察作用距离与截获概率
图5―4 检波输出的噪声功率谱
2
没有信号作用时的基线视频噪声功率为
(5―4)
2 2 W f 2 0 V Pm1 P | [ W f f ] V PS 0 0 0 R V 2 RV 2
2
(5―5)
第 5章
雷达侦察作用距离与截获概率
微波检波器和视放所产生的白噪声功率P′V为
P′V=(FV+tVD-1)KT0ΔfV 对于肖特基二极管,相对噪声温度tVD≈1,代入上式得 到: P′V=KT0ΔfVFV (5―6)
第 5章
雷达侦察作用距离与截获概率
因此,检波输出的噪声功率谱F(f)由下式给出:
2 fR 2 2 R [W0 ( f R f ) PS 0W0 ] 0 f 2 V F( f ) 2 fR [W 2 ( f f )] f fR 0 R 2 2 RV
第 5章
雷达侦察作用距离与截获概率
1.ΔfV≤ΔfR≤2ΔfV
ΔfV 位于 ΔfR/2 和 ΔfR 之间 , 视放将通过射频信号与噪 声互差拍的全部视频噪声和射频噪声自差拍的部分视 频噪声,其输出视频噪声功率PV为
P V
/V
0
2 2 W 2 0 fV F (t )df [W0 fV PS 0W0 f R ] Pm1 2 RV 2
视放输出的信号功率为
PS
2
4 RV
P
2 S0
(5―7)
第 5章
雷达侦察作用距离与截获概率
在计算噪声功率时 ,需要同时考虑射频噪声和检波、
视放噪声,实际的基线噪声功率为
2 2 W f 2 0 0 Pn Pn1 P [ W f f ] KT0 fV FV V 0 R V 2 RV 2
第 5章
雷达侦察作用距离与截获概率
图5―1 切线信号灵敏度的示意图
第 5章
雷达侦察作用距离与截获概率
工作灵敏度 POPS 的定义为 : 接收机输入端在脉冲信
号作用下,其视频输出端信号与噪声的功率比为14dB时, 输入脉冲信号功率为接收机工作灵敏度 POPS 。在已知 切线信号灵敏度 PTSS 时 , 输出信噪比为 8dB 的条件下 , 工 作灵敏度POPS的分析可由PTSS换算得来。
波器时,其输出包含有噪声的自差拍分量、信号的自差拍
分量和信号与噪声的互差拍分量,其中信号的自差拍分量 作为接收机输出的视频信号,其余两部分均为接收机输出 的噪声。
第 5章
雷达侦察作用距离与截获概率
图5―3 输入信号、噪声功率谱及放大器的幅频特性 (a)输入信号功率谱;(b)输入噪声功率谱;
(c)放大器的幅频特性
M
RV
(5―1)
式中,γ为检波器的开路电压灵敏度;RV为检波器的 视频输出电阻。
第 5章
雷达侦察作用距离与截获概率
图5―2 晶体视频接收机的典型方框图
第 5章
雷达侦察作用距离与截获概率
由M和FV决定常数A:
4 FV 6 A 10 KT0 M 2
(5―2)
式中 ,K 为玻尔兹曼常数 (1.38×10-23J/K);T0 为环境 温度(一般取290K)。当信号与噪声同时作用于平方律检
第 5章
雷达侦察作用距离与截获概率
晶体视频接收机的典型方框图如图 5―2 所示。图
中GR、FR和ΔfR分别表示检波前射频放大器的增益、噪 声系数和带宽 ,GV 、 FV 和 ΔfV 分别表信号功率
谱为δ函数,输入噪声功率谱和放大器的幅频特性均为矩 形,如图5―3所示,且GV=1,检波器工作在平方律区域,肖 特基二极管的检波品质因数
第 5章
雷达侦察作用距离与截获概率
5.1.2 切线信号灵敏度PTSS的分析计算
侦察接收机与雷达接收机有两点明显的不同。首 先,雷达接收机的检波前滤波器、检波后滤波器都与其 接收信号处于准匹配状态;而对于侦察接收机来说,由于 侦收的都是未知信号 ,检波前和检波后的滤波器都与其 接收的雷达信号处于严重失配状态 ,检波前的滤波器带 宽 ΔfR 与检波后的视放带宽 ΔfV之比相差很大 ( 雷达接收 机中ΔfR/ΔfV≈2);
第 5章
雷达侦察作用距离与截获概率
其次,表现在接收机的体制上,雷达几乎都采用超外
差接收机,检波前具有很高的增益,检波器和视放的噪声 特性对输出噪声的影响可以忽略;而侦察接收机可能采
用超外差接收机、晶体视频接收机等多种形式,有时在
检波前没有很高的增益,检波器和视放的噪声特性对输 出噪声有一定的影响。因此,必须推演侦察接收机的切 线信号灵敏度。以下仅以晶体视频接收机为例进行定 量分析,再将结果推广到其它接收机。
2
(5―8)
有信号作用时,输出噪声为
第 5章
雷达侦察作用距离与截获概率
第5章 雷达侦察作用距离与截获概率
5.1 侦察系统的灵敏度 5.2 侦察作用距离 5.3 侦察截获概率与截获时间
第 5章
雷达侦察作用距离与截获概率
5.1 侦察系统的灵敏度
雷达侦察系统的灵敏度 Prmin 是指满足侦察接收机 对接收信号能量正常检测的条件下 ,在侦察接收机输入 端的最小输入信号功率。由于被侦收的雷达信号大多 是脉冲信号,因此,在雷达侦察系统中采用的灵敏度定义 主要是切线信号灵敏度PTSS和工作灵敏度POPS。
第 5章
雷达侦察作用距离与截获概率
5.1.1 切线信号灵敏度PTSS和工作灵敏度POPS的定义
切线信号灵敏度 PTSS 的定义如图 5―1 所示。在某 一输入脉冲功率电平作用下 ,接收机输出端脉冲与噪声 叠加后信号的底部与基线噪声(只有接收机内噪声时)的 顶部在一条直线上 ( 相切 ), 则称此输入脉冲信号功率为 切线信号灵敏度 PTSS。不难证明 ; 当输入信号处于切线 电平时 , 接收机输出端视频信号与噪声的功率比约为 8dB。