第5章机械的效率和自锁
孙桓《机械原理》笔记和课后习题(含考研真题)详解(机械的效率和自锁)【圣才出品】

第5章机械的效率和自锁5.1 复习笔记一、机械的效率1.功和效率(1)机械效率①驱动功机械上的驱动功(输入功)为W d,有效功(输出功)为W r,损失功为W f。
则有W d=W r+W f②机械效率a.定义机械的输出功与输入功之比称为机械效率,反映了输入功在机械中的有效利用程度,以η表示。
b.计算方法用功计算时η=W r/W d=1-W f/W d;用功率计算时η=P r/P d=1-P f/P d;式中,P d——输入功率;P r——输出功率;P f——损失功率。
(2)损失率①定义机械的损失功与输入功之比称为损失率,以ξ表示。
②计算方法由定义有ξ=W f/W d=P f/P d。
注:η+ξ=1,由于摩擦损失不可避免,故必有ξ>0和η<1。
(3)效率的简便计算方法为便于效率的计算,可应用下式进行计算η=理想驱动力/实际驱动力=理想驱动力矩/实际驱动力矩①斜面机构正反行程的机械效率分别为η=tanα/tan(α+φ)η′=tan(α-φ)/tanα式中,α——斜面夹角;φ——总反力与法向反力的夹角。
②螺旋机构拧紧和放松螺母时的效率计算式分别为η=tanα/tan(α+φv)η′=tan(α-φv)/tanα式中,α——中径升角;φv——螺旋副的摩擦角。
2.机器(或机组)的效率已知各机构的效率可计算确定整个机构的效率。
常用机构的效率见教材表5-1。
(1)串联①计算公式由k个机器串联组成的机组,设各机器的效率分别为η1、η2、…、ηk,机组的输入功率为P d,输出功率为P r。
则整个串联机组的机械效率为η=P r/P d=(P1/P d)(P2/P1)…(P k/P k-1)=η1η2…ηk②特点a.前一机器的输出功率即为后一机器的输入功率;b.只要串联机组中任一机器的效率很低,就会使整个机组的效率极低;c.串联机器的数目越多,机械效率也越低。
③提高串联机组效率的措施a.减少串联机器的数目;b.优先提高效率最低机器的效率。
第5章机械的效率和自锁

P1 1
P’1
P2
Pk
2
k
P’2
P’k
Pr
总效率η不仅与各机器的效率ηi有关,而且与传递的功率 Pi有关。
设各机器中效率最高最低者分别为ηmax和ηmin 则有:
ηmin<η <ηmax
3.)混联 先分别计算,合成后按串联或并联计算。
P1 1
P2 P’d23‘ P’d3 4‘P’r 2
Pd
P”d23“ P”d3 P4“kP”r
无论F多大,滑块在F的作用下不可能运动
FR Ft F Fn
φβ 1
Ff
2
当驱动力的作用线落在摩擦角(锥)内时,则机械发生 自锁。
5.4.2转动副的自锁
a
对仅受单力F作用的回转运动副产 生的力矩为: Md=F·a
最大摩擦力矩为: Mf =FRρ
1F FR
2
当力F的作用线穿过摩擦圆(a<ρ)时,发生自锁。
Ff 21
简单平面移动副
2 FN21 G
Ff 21 fFN21 fG
v FN21
12
F 1
G
●槽面接触: fv= f / sinθ
G=(FN21 /2)sinθ+(FN21 /2)sinθ FN21 = G / sinθ Ff21= f FN21
= G (f / sinθ) =G fv
fv─当量摩擦系数。
第5章 机械的效率和自锁
本章教学内容
5.1运动副中摩擦力的确定 5.2考虑摩擦时机构的受力分析 5.3机构的效率 5.4机构的自锁
5.1 运动副中的摩擦力的确定
5.1.1移动副中摩擦力的确定
●水平面接触:
Ff 21 fFN21
《机械原理》课件-第5章②机械自锁
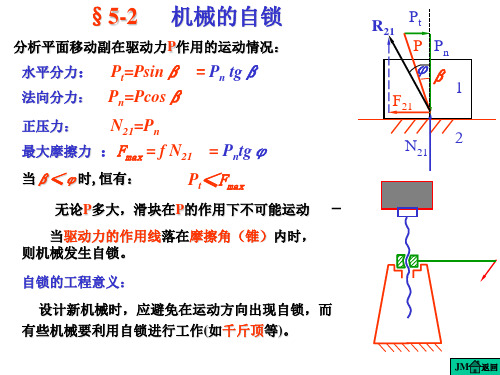
分析平面移动副在驱动力P作用的运动情况:
水平分力: Pt=Psinβ = Pn tgβ 法向分力: Pn=Pcosβ
正压力:
N21=Pn
最大摩擦力 :Fmax = f N21 = Pntgφ
当β≤φ时,恒有:
Pt≤Fmax
无论P多大,滑块在P的作用下不可能运动
R21 Pt P PnOE来自PδA
e
C R23
φD
3
O
B
2
E
δ-φ
A
C
1
φ
esin(δ-φ)-(Dsinφ)/2≤ρ
B
JM 返回
当机械出现自锁时,无论驱动力多大,都不能运动,从能量的观点来看, 就是驱动力所做的功永远≤由其引起的摩擦力所做的功。即:
η≤0
设计机械时,上式可用于判断是否自锁及出现自锁条件。 说明: η≤0时,机械已不能动,外力根本不做功,η已失去一般效 率的意义。仅表明机械自锁的程度。且η越小表明自锁越可靠。
a
1P R
应用实例:图示偏心夹具在P力加紧,去掉P后要求
2
不能松开,即反行程具有自锁性,
s
若总反力R23穿过摩擦圆--发生自锁
s1
由此可求出夹具各参数的几何条件为:
s-s1≤ρ
在直角△ABC中有:
s1 =AC =(Dsinφ) /2
在直角△OEA中有:
s =OE=esin(δ-φ)
该夹具反行程具有自锁条件为:
②令η≤0;
③令生产阻力Q≤0; ④驱动力在运动方向上的分力Pt≤F摩擦力。
JM 返回
f =0.15
(2)斜面压榨机
φv =8.7°
Q
R13 3 1
孙桓《机械原理》【教材精讲+考研真题解析】(第五章机械的效率与自锁)【圣才出品】

第5章机械的效率与自锁[视频讲解]5.1本章要点详解本章要点■机械效率的定义及其计算方法■提高机械效率的措施■机械的自锁现象及其应用■机械的自锁条件及其确定重难点导学一、机械的效率1.机械效率的概念及意义(1)概念①机械效率机械的输出功与输入功之比称为机械效率,它反映了输入功在机械中的有效利用程度,以 表示。
②损失率机械的损失功(W f)与输入功(W d)的比值称为机械损失系数或损失率,以ξ表示。
(2)意义①机械效率反映了输入功在机械中的有效利用的程度。
②机械效率是机械中的一个主要性能指标。
③因摩擦损失是不可避免的,故必有ξ>0和η<1。
2.机械效率的确定(1)机械效率的计算确定①以功表示的计算公式式中W r表示有效功、W f表示损失功、W d表示总功。
②以功率表示的计算公式式中P r表示有效功率、P f表示损失功率、P d表示总功率。
③以力或力矩表示的计算公式η=F0/F=M0/M式中M0和M分别表示为了克服同样生产阻力所需的理想驱动力矩和实际驱动力矩,所以其计算公式也可表示为(2)机械效率的实验测定机械效率的确定除了用计算法外,更常用实验法来测定,许多机械尤其是动力机械在制成后,往往都需作效率实验。
3.机组的机械效率计算已知机构的效率可计算确定整个机构的效率。
常用机构的效率见如表5-1-1所示。
表5-1-1简单传动机构和运动副的效率(1)机组的定义由若干个机器组成的机械系统称为机组。
当已知机组各台机器的机械效率时,则该机械的总效率可由计算求得。
(2)机组的分类①串联机组如图5-1-1所示,由k个机器串联组成的机组,设各机器的效率分别为1η、2η、…、η,则串联机组的效率为k图5-1-1串联机组由此可见,只要串联机组中任一机器的效率很低,就会使整个机组的效率极低;且串联机器的数目越多,机器的效率也越低。
因此,提高串联机组机械效率的方法有:a.减少串联机构的数目;η。
b.提高机组中最小的机械效率min②并联机组如图5-1-2所示,由k个机构并联组成的机组,设各机构的效率分别为1η、2η、……kη,则并联机组的效率为图5-1-2并联机组由此可见,并联机组的特点有:a.机组的输入功率为各机器的输入功率之和,而其输出功率为各机器的输出功率之和。
机械原理 第五章机械的效率

(机械自锁时已不能运动,它已不能克服任何工作阻力(即使很小),工作阻力
G〈 0 意味着只有工作阻力反向而变成驱动力后,才可能使机械运动,即G〈 0 机 械自锁)
机械原理
第5章机械的效率和自锁
例1偏心夹具
确定当作用在手柄上的力去 掉后夹具不至松开的条件 (即自锁条件)
7。 风 力 发 电 机 中 的 叶 轮 受 到 流 动 空 气 的 作 用 力,
此力在机械中属于
。
A) 驱 动 力;B) 生 产 阻 力; C) 有 害 阻 力; D) 惯 性 力。
8。在机械中阻力与 其作用点速度方向
。
A).相 同; B).一定相反; C).成锐角; D).相反或成钝角 。
机械原理
第5章机械的效率和自锁
思考题:
1。移动副的自锁条件是—————————,转动副的自锁条件是—————— ———,螺旋副的自锁条件是—————————。
2。机械中V带比平带应用广泛,从摩擦角度来看,其主要原因是——————。
3。在由 若 干机 器 并 联 构 成 的 机 组 中, 若 这 些 机 器 的 单 机 效
A) 都 不 可 能;B) 不 全 是;C) 一 定 都。
6。在 车 床 刀 架 驱 动 机 构 中, 丝 杠 的 转 动 使 与 刀 架 固
联 的 螺 母 作 移 动, 则 丝 杠 与 螺 母 之 间 的 摩 擦 力 矩
属于
。
A)驱 动 力;B)生 产 阻 力;C)有 害 阻 力;D)惯 性 力。
(2)并联:由几种机器并联组成的机组。
(3)混联:包含串、并联。
机械原理
第5章机械的效率和自锁
机械原理复习题(第3、4、5、8章)

第3章平面机构的运动分析第4章平面机构的力分析第5章机械的效率和自锁第8章平面连杆机构及其设计一、填空题:α=,则传动角γ=___________度,传动角越大,1、铰链四杆机构的压力角040传动效率越___________。
2、下图为一对心曲柄滑块机构,若以滑块3为机架,则该机构转化为机构;若以构件2为机架,则该机构转化为机构。
3、移动副的自锁条件是;转动副的自锁条件是。
4、曲柄摇杆机构中,当和共线时出现死点位置。
:5、曲柄摇杆机构中,只有取为主动件时,才有可能出现死点位置。
处于死点位置时,机构的传动角γ=__________度。
6、平行四边形机构的极位夹角θ=,它的行程速比系数K=。
7、曲柄滑块机构中,若增大曲柄长度,则滑块行程将。
8、如下图所示铰链四杆机构,70mm,150mm,110mm,90mm====。
若以a b c da杆为机架可获得机构,若以b杆为机架可获得机构。
9、如图所示铰链四杆机构中,若机构以AB杆为机架时,为机构;以CD 杆为机架时,为机构;以AD杆为机架时,为机构。
~10、在平面四杆机构中,和为反映机构传力性能的重要指标。
11、在曲柄摇杆机构中,如果将杆作为机架,则与机架相连的两杆都可以作运动,即得到双曲柄机构。
12、在摆动导杆机构中,若以曲柄为原动件,该机构的压力角为,其传动角为。
13、相对瞬心与绝对瞬心的相同点是,不同点是;在由N个构件组成的机构中,有个相对瞬心,有个绝对瞬心。
/二、判断题:1、对于铰链四杆机构,当机构运动时,传动角是不变的。
()2、在四杆机构中,若有曲柄存在,则曲柄必为最短杆。
()3、平面四杆机构的行程速度变化系数K 1,且K值越大,从动件急回越明显。
()4、曲柄摇杆机构中,若以摇杆为原动件,则当摇杆与连杆共线时,机构处于死点位置。
()5、曲柄的极位夹角θ越大,机构的急回特性也越显著。
()6、在实际生产中,机构的“死点”位置对工作都是不利的,处处都要考虑克服。
机械原理5机械效率与自锁

一、机械的效率
机械在稳定运转阶段恒有: Wd= Wr+Wf η =Wr / Wd =(Wd-Wf) /Wd =1-Wf /Wd
比值Wr / Wd反映了驱动功的有效利用程度, 称为机械效率。
用功率表示:η =Nr / Nd =(Nd-Nf) /Nd
=1-Nf /Nd
分析:η 总是小于 1,当Wf 增加时将导致η 下降。
以上为效率计算方法,工程上更多地是用实验法
测定η ,表5-1列出由实验所得简单传动机构和运
动副的机械效率(P69-P70)。
表5-1 简单传动机械和运动副的效率
名称
传动形式
效率值
备注
圆柱齿 轮传动
6~7级精度齿轮传动
8级精度齿轮传动 9级精度齿轮传动 切制齿、开式齿轮传动
铸造齿、开式齿轮传动
6~7级精度齿轮传动
拧紧时:
M
d2 2
Gtg(
v )
理想机械: M0=(d2 G tgα) / 2 η=M0 / M =tgα/tg(α+φv )
拧松时,驱动力为G,M’为阻力矩,则有:
实际驱动力:
G=2M’/d2 tg(α-φv )
理想驱动力: ∴
G0=2M’/d2 tgα η’=G0/G =tg(α-φv ) / tgα
良好跑合、稀油润滑 稀油润滑 干油润滑
0.40~0.45 0.70~0.75
0.75~0.82 0.80~0.92 0.85~0.95
润滑良好
名称 带传动
链传动 摩擦轮
传动 滑动轴承 滚动轴承
螺旋传动
续表5-1 简单传动机械和运动副的效率
传动形式
效率值
备注
第五章机构的效率与自锁

计算公式:
η= Nr /Nd =G vG/(F vF) 设: η0=1的理想机械 η0=1= G vG/ (F0 vF) 则有: η= F0/ F 或η= M0/ M
(F0/ M0不考虑摩擦时的理想驱动力/矩)
斜面机构的效率
正行程:F=G*tg(α+ φ)
φ)
反行程 F’=G*tg(α-
(F为驱动力)
3。利用效率≤0(驱动力所作的功不足克服其所引起的最 大损失功 因驱动力G=FR32 G=FR32 = F sin(90+) /sin(-2) =F cos / sin(-2) G0 = F / sin = G0/G = (F/sin)/(Fcos /sin(-2)) = sin(-2)/ (sin cos ) ≤0 sin(-2) ≤0 -2≤0 即自锁条件为 ≤ 2
2、驱动力F ≤0(即必须加一个反向的作用力才能将楔形块拉出 对上例中楔形块2,F+FR12+FR32=0 利用正弦定律: F/sin(-2)= FR32 /sin(90+) = FR12 /sin(90-+) 因为 F ≤0 所以 sin(-2) ≤0 即自锁条件为: ≤ 2
3)混联系统
§5-2机构的自锁
一.定义 由于摩擦力的存在,使机构无论在多大的驱动力的作用下 都无法运动的现象,称为自锁. 例: 1、螺旋千斤顶 A 旋转螺母,使重物上升 B 撤去旋转力F,则无论 重物多重,都不能使螺 母反转,使重物下降。 - - - - - -可利用的自锁
二、自锁的条件
1、移动副 分析右图所示滑块机构,要使滑块 向右滑动或有向右滑动的趋势, 则:Ff<Ft 因 Ft=Fsin Fn=Fcos Ff=Fn tg= F cos tg 有 F sin> F cos tg tg > tg 故 > 反之,当≤时,无论作用在滑 块上的力有多大,Ff≥Ft,机构自锁, 也即当驱动力作用在摩擦锥内时, 机构自锁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r2)
=
f
G(R+r)/2
r
5.1考虑摩擦时机构的受力分析
●考虑摩擦时,机构受力分析的步骤: 1)计算出摩擦角和摩擦圆半径,并画出摩擦圆; 2)从二力杆着手分析,根据杆件受拉或受压及该杆相对于 另一杆件的转动方向,求得作用在该构件上的二力方向;
3)对有已知力作用的构件作力分析; 4)对未知力所在构件作力分析、求解。
方向:与ω12相反。
——摩擦圆半径
G' Md
12
1
2
总反力
FR21恒切于摩擦圆。 对轴心矩的方向与ω12相反。
G G'G' G'
FR21FR21 Mf
FN21
Ff21
●转动副总反力方位线的确定
FR21
12
FR21
12
FR21
1
2
1
2
1
2
G
G
G
1) FR21与载荷G大小相等,方向相反; 2) FR21的作用线必切于摩擦圆; 3) FR21产生的摩擦力矩与12转动方向相反。
【例5-2】已知机构简图、各摩擦角、摩擦圆半径、
驱动力矩Md ,阻力Fr。试画出各运动副静力图。
Md
1
2
3
Fr
4
【解】 1.从二力杆(连杆)入手,注意拉压杆。
Md 1
21 23
2
3
Fr
4
Md 1
21 23
2
3
Fr
4
21
Md 1
23
2
3
Fr
4
【解】 1.从二力杆(连杆)入手,注意拉压杆。 2.分析滑块,注意三力汇交。 3.分析曲柄,注意力偶平衡力拒。
= fr
2
F
45
3
2.确定各轮的转向,并标在
4
图上。
3.取1构件为分离体进行力分析。
5
G
3.取1构件为分离体进行力分析。
6
FR61 16
16
1
R T21 F R
23
1
T21
F
4.取2构件为分离体进行力分析。 45
2
F
T62 23
T12
FR12
Md 1
FR41
2
4
90o+ 34
3
Fr
FR43
FR32
FR12
Md
1
FR41
21
23
2
FR43 Fr
4 3
V34
FR32
【例5-2】如图滑轮组,已 知r、R分别为轴肖和滑轮 半径,f为轴销摩擦系数, F为滑轮组的驱动力,试 求G=?。
6
16
23
1
【解】1.计算摩擦圆半径,并
画在图上。
R
fpds
2f
R
p 2d
r
r
●新轴端,p=常数: p G / (R2 r2 )
2R
dρ ω ρr
M f
2
fp
R 2d
r
= 2 fp(R3 r3 )
3
2 3
R3 r3 fG R2 r2
R
●跑合轴端, pρ=常数
R
G pds 2p(R r) r
M f 2fp
R
d
fp(R2
F
【例5-1】滑块等速在斜面运动,确定驱动力。
●正行程
【解】1.确定总反力的方向
2.根据滑块力系平衡列方程:
φα
V12
F R21
1
FR21 G F 0
F
3.做图求解未知力
α
G
2
F Gtan( +)
F
α+ φ G
F R21
●反行程
【解】1.确定总反力的方向
F R21
2.根据滑块力系平衡列方程:
槽面接触: Ff21= ( f / sinθ) G 半圆柱面接触: Ff21= f kG
非平面接触时 , 摩擦力增大。
应用:当需要增大滑动摩擦力时,可将接触面设计成槽面或柱面。 如圆形皮带(缝纫机)、三角形皮带、螺栓联接中采用的三角形 螺纹。
fv=3.24 f
θθ
对于三角带:
θ=18°
5.1.2移动副中总反力的确定
FR21 G F 0
3.做图求解未知力
F Gtan( -)
分析
φ
V12
α
α
1 F
G
2
F
若α>φ,F 为阻力。
若α<φ, F 方向相反,为驱动力。
F R21 G
α-φ
5.1.2螺旋副中摩擦力的确定
1、矩形螺纹螺旋中的摩擦 ●矩形螺纹螺旋副的简化 斜面其升角为:
tgα =l /πd2=zp /πd2
22
放松力与力矩为:
F ' Gtg( )
M ' F ' d2 d2 Gtg( )
22
G
d2 M F
d2 v
F
l
α
Gπd2
5.1.2转动副中摩擦力的确定
轴 轴承
轴径 轴端
1.转动副(轴径)
Ff21 = fvG FR21=G 摩擦力矩的大小
Mf= Ff21 r = fvGr
令 = fvr Mf = G = FR21
注意 FR21是构件2作用到构件1上的力,是构件1所受的力。
12是构件1相对于构件2的角速度。
2. 轴端摩擦
取环形面积: ds=2πρdρ 设ds上的压强为p,正压力为:dFN=pds,
Gω
Mf 1
M
摩擦力为:dFf= fdFN = fpds
2
2r
摩擦力矩:dMf =ρdFf =ρfpds
总摩擦力矩:M f
Ff 21
简单平面移动副
2 FN21 G
Ff 21 fFN21 fG
v FN21
12
F 1
G
●槽面接触: fv= f / sinθ
G=(FN21 /2)sinθ+(FN21 /2)sinθ FN21 = G / sinθ Ff21= f FN21
= G (f / sinθ) =G fv
fv─当量摩擦系数。
总反力——法向反力与摩擦力的合力
FR21 Ff 21 FN 21
FR21
tan Ff 21 / FN 21
fFN 21 / FN 21 f
(v )─摩擦角(当量摩擦角)
摩擦锥—以 FR21为母线所作圆锥。
● FR21与v12夹钝角(90+)
● FR21恒切于摩擦锥。
1 Ff21
2 G
FN21 v12
θ
FN 21 2
②
G θ
FN
①
21
2
●半圆柱面接触: fv =f k
FN21=kG Ff21= f kG
2
=G fv
理论分析和实验结果有: k =1~π/2
结论:不论何种运动副元素,有计算通式:
Ff21= f FN21
= fvG
fv-称为当量摩擦系数
FN21 1
G
总结:
水平面接触: Ff 21 fG
第5章 机械的效率和自锁
本章教学内容
5.1运动副中摩擦力的确定 5.2考虑摩擦时机构的受力分析 5.3机构的效率 5.4机构的自锁
5.1 运动副中的摩擦力的确定
5.1.1移动副中摩擦力的确定
●水平面接触:
Ff 21 fFN21
G一定时,决定 Ff21 的两个因素:
1. f
2. 运动副元素的几何形状
式中:l-导程,z-螺纹头数,p-螺距
假定螺母与螺杆间的作用力集 中在一小段螺纹上,这样就可以把 螺旋副中摩擦的研究简化为滑块在 倾斜平面上的摩擦来研究。
G
G
G
d2
v
F
l
α
Gπd2
●拧紧力矩与放松力矩 根据滑块在斜面的运动 拧紧力与力矩为:
F Gtg( )
M F d2 d2 Ftg( )