基于DSP的直流电机驱动控制电路设计_何存富
基于DSP的无刷直流电动机控制系统设计
嵌入式应用软件园,版权所有,请勿转载/销售。
一般工业场合不需要调速的领域以往大多是采用三相或单相交流异步和同步电机。 随着电力电子技术的进步,在功率不大于 10KW 且连续运行的情况下,为了减少体积, 节省材料,提高效率和降低能耗,越来越多的电机正被无刷直流电机逐步取代,这类应 用有:自动门、电梯、水泵、风机等。而在功率较大的场合,由于一次成本和投资较大, 除了永磁电机外还要增加驱动器,因此目前较少有应用。 2.调速驱动机械 速度需要任意设定和调节,但控制精度要求不高的调速系统分为两种:一种是开环 调速系统,另一种是闭环调速系统 (此时的速度反馈器件多采用低分辨率的脉冲编码器 或交、直流测速等) 。通常采用的电机主要有三种:直流电机、交流异步电机和无刷直 流电机。这在包装机械、食品机械、印刷机械、物料输送机械、纺织机械和交通车辆中 有大量应用。 调速应用领域最初用得最多的是直流电机, 随着交流调速技术特别是电力电子技术 和控制技术的发展,交流变频技术获得了广泛应用,变频器和交流电动机迅速渗透到原 来直流调速系统的绝大多数应用领域。近几年来,由于无刷直流电机体积小、重量小和 高效节能等一系列优点,中小功率的交流变频系统正逐步被无刷直流电机系统所取代, 特别是在纺织机械、印刷机械等原来应用变频系统较多的领域,而在一些直接由电池供 电的直流电机应用领域,则更多的由无刷直流电机所取代。 3.精密控制 伺报电动机在工业自动化领域的高精度控制中扮演了一个十分重要的角色, 应用场 合不同,对伺服电动机的控制性能要求也不尽相同,在实际应用中,伺服电动机有各种 不同的控制形式:转矩控制/ 电流控制、速度控制、位置控制。无刷直流电机由于其良 好的控制性能,在高速、高精度定位系统中逐步取代了直流电机与步进电机,成为其首 选的伺服电机之一。目前,扫描仪、摄影机、CD 唱机驱动、医疗诊断 CT、计算机硬盘 驱动及数控车床驱动中等都广泛采用了无刷直流电机伺服系统用于精密控制。 4.其他应用 家用电器、大型同步电机启动等。
基于DSP的双直流电机控制系统设计

第38卷第5期 2017年10月河北科技大学学报Journal of Hebei University of Science and TechnologyVol. 38,No. 5Oct. 2017文章编号:1008-1542 (2017) 05-0424-08doi:10. 7535/hbkd.2017yx05003基于DSP的双直流电机控制系统设计王锁,时培成,徐增伟(安徽工程大学汽车新技术安徽省工程技术研究中心,安徽芜湖241000)摘要:针对多电机同步控制系统中调速、换向等问题,基于自动控制技术,设计以P C机为上位 机、DSP为下位机能够同时调节双直流电机转速和转向的,以及选择工作电机的控制系统。
给出 了控制系统相关硬件和软件设计,通过P C机与DSP之间的串口通信,采用上位机串口软件发送 数字化控制指令给下位机,控制双直流电机完成一系列预设功能;采用PW M脉宽调制原理对电机 的转速进行调节,利用光电编码器通过T法对电机转速进行测量,并通过实测波形显示电机转速。
实验结果表明,该系统不仅能够实现双直流电机转速和转向的同步调节,而且可以对工作电机进行 选择,达到了双直流电机同步控制的效果,具有一定的可靠性及有效性。
关键词:自动控制技术;双直流电机;编码器;PWM;T法中图分类号:TM331 文献标志码:ADesign of double DC motor control system based on DSPWANG Suo9SHI Peicheng,XU Zengwei(Anhui Engineering Technology Research Center of Automotive New technique, Anhui Polytechnic University, Wuhu, Anhui 241000, China)Abstract :Aiming at the problems of speed control, commutation and so on in the multi-motor synchronous control system, based on automatic control technology, a control system with PC as principal computer and DSP as slave computer is designed, which can change dual DC motor speed and steering, as well as select work drive motors. Related hardware and software design of the control system are given. Through serial communication between DSP and PC using PC serial port software, digital control command is sent to the slave computer for controlling dual DC motor to do a series of preset functions. PWM pulse width modulation is used for motor speed regulation, photoelectric encoder is used to measure motor speed by T method, and the motor speed is displayed by the actual waveform. Experimental results show that the system can not only realize the synchronization of dual DC motor speed and steering adjustment, but also select the motor and achieve the dual DC motors synchronization control effect. The control system has certain reliability and effectiveness.Keywords : automatic control technology;double DC m otor;encoder;P W M;T method收稿日期:2017-05-01;修回日期:2017-08-24;责任编辑:李穆基金项目:国家自然科学基金(51575001);安徽省科技攻关项目(1604a0902158);安徽高校科研平台创新团队建设项目(2016 — 2018年度)第一作者简介:王锁(1994一),男,安徽淮北人,硕士研究生,主要从事电机控制方面的研究。
基于DSP的直流电机控制系统设计_本科毕业论文

基于DSP的直流电机控制系统设计摘要:直流电机由于励磁磁场和电枢磁场完全解耦,可以独立控制,因此具备良好的调速性能,出力大、调速范围宽和易于控制,广泛应用于电力拖动系统中。
而随着对电机控制要求的不断提高,普通的单片机越来越不能满足对电机控制的要求,DSP技术的发展正好为先进控制理论以及复杂控制算法的实现提供了有力的支持。
本设计采用美国TI公司专门为电机数字化控制设计的16位定点DSP控制器TMS320LF2407作为微控制器。
该芯片集DSP信号高速处理能力及适用于电机控制优化的外围电路于一体,可以为高性能传动控制技术提供可靠高效的信号处理与控制硬件。
电机的控制系统是由检测装置、主控制器、功率驱动器以及上位机组成,其中DSP控制器是电机控制系统的关键部分,负责对电机的反馈信号进行处理并输出控制信号来控制电机的转动。
关键词:直流电机;DSP;PID控制器;PWMThe Design of DC Motor Control System Based on DSPAbstract:The DC motor armature magnetic field and the excitation completely decoupled, it can be independently controlled, so it has a good speed performance, contribute to a large power, widely speed range, and easy to control, so it is widely used in electric drive systems. With the motor control required for continuous improvement, common single MCU can't meet requirements of the motor control well, DSP technology just for the advanced control theory and complex control algorithm implementation provides a strong support.This design uses the American TI company specially for motor control design of digital 16 fixed-point DSP controller TMS320LF2407 as the controller. The chip set DSP signal the high processing capacity and used in motor control optimization the periphery of the circuit in a body, high performance driving control technology to provide reliable and efficient signal processing and control hardware. Motor control system is composed of detection devices, the main controller, power driver and PC componen ts, which DSP controller is a key part of the motor control system , responsible for the motor feedback signal processing and output control sig n al to control the rotation of the motor.Keywords:DC motor, DSP, PID controller, PWM目录第1章绪论 (1)1.1 课题概述 (1)1.1.1 课题研究的背景 (1)1.1.2 课题研究的目的及意义 (2)1.2 课题研究的现状 (2)1.3 课题研究的内容 (5)第2章系统总体设计 (6)2.1 系统的组成 (6)2. 2 DSP芯片选择 (6)2.3 TMS320LF2407 DSP 控制器介绍 (7)2.4 硬件方案论证 (10)2.4.1 测速传感器的选择 (10)2.4.2 功率驱动单元方案论证 (11)2.4.3 键盘显示方案论证 (11)2.4.4 PWM实现方案论证 (12)2.5 本章小节 (12)第3章系统硬件设计 (13)3.1 电源电路的设计 (13)3.2 功率驱动单元的设计 (13)3.2.1 PWM调速原理 (14)3.2.2 电机驱动电路 (15)3.3 速度检测单元的设计 (16)3.3.1 速度检测的方法 (16)3.3.2 速度检测电路设计 (17)3.4 按键控制单元的设计 (18)3.5 显示单元的设计 (20)3.5.1 1602液晶介绍 (20)3.5.2 显示单元接口电路设计 (20)3.6 通信单元的设计 (21)3.7 本章小节 (22)第4章系统软件设计 (23)4.1 主程序的设计 (23)4.1.1 主程序 (23)4.1.2 初始化子程序 (24)4.1.3 显示程序 (24)4.2 中断服务程序的设计 (24)4.2.1 PWM波发生程序 (25)4.2.2 捕获中断程序 (27)4.3 PID控制算法 (28)4.3.1 PID控制原理 (29)4.3.2 系统PID控制 (29)4.4 本章小节 (31)第5章系统总体调试 (32)5.1 调试准备 (32)5.2 系统调试 (32)结论 (34)致谢 (35)参考文献 (36)附录 ................................................................................................ 错误!未定义书签。
基于DSP无刷直流电动机控制系统设计

基于DSP无刷直流电动机控制系统设计宋连庆;袁世博;韩兴会【期刊名称】《计算机与数字工程》【年(卷),期】2018(046)003【摘要】Brushless DC motor has the characteristics of simple structure,high efficiency and high energy saving.It is widely used in various fields of economic development. In order to improve the speed control performance of brushless DC motor as a re?quirement,high performance DSP28335 for controlling the core of the motor speed controlsystem.Based on the principle of brush?less DC motor,a closed-loop PID control system with voltage and current is designed on the basis of brushless DC motor.The de?sign of brushless DC motor control system is completed from hardware and software.The control system includes brushless DC motor hardware drive circuit and PWM control speed control software system. And the simulation experiment is carried out inMatlab/Simulink.It is proved that the speed control system has the advantages of stable start speed,excellent speed regulation performance and high control precision,and it has good static,dynamic characteristics and adaptability.%无刷直流电动机具有结构简单,效率高节能等特点使其被广泛应用在经济发展的各项领域,该文以改善无刷直流电机的调速控制性能来作为要求,设计了以浮点型高性能DSP28335为控制核心的电动机转速控制系统.通过了解无刷直流电动机工作原理,在无刷直流电动机原来基础上设计了电压电流双闭环PID控制系统,从硬件和软件两个方面完成了无刷直流电动机控制系统的设计.控制系统包含无刷直流电动机的硬件驱动电路以及PWM控制调速软件系统.并在Matlab/Simulink中对控制系统进行搭建建模仿真实验,验证了此调速控制系统具有启动稳定迅速、调速性能优良以及控制精度高等优点,具有良好的静态,动态特性以及自适应性.【总页数】6页(P596-600,613)【作者】宋连庆;袁世博;韩兴会【作者单位】西安工程大学电子信息学院西安710048;西安工程大学电子信息学院西安710048;西安工程大学电子信息学院西安710048【正文语种】中文【中图分类】TN964.3【相关文献】1.基于DSP的无刷直流电动机控制系统设计 [J], 胡卓林;毛宏宇;王书士;路靖2.基于DSP的无刷直流电动机控制系统设计 [J], 戚鹏3.基于dsPIC30F4012的无刷直流电动机控制系统设计 [J], 吴青萍4.基于dsPIC30F4012的无刷直流电动机控制系统设计 [J], 刘鹏;李声晋;芦刚5.基于dsPIC30F3010的无刷直流电动机控制系统设计 [J], 郎宝华;闵喜艳;张婧因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的无刷直流电机伺服控制系统设计

基于DSP的无刷直流电机伺服控制系统设计摘要:随着我国电子电力技术的快速发展,永磁材料也得到了质的飞跃,基于现代控制理论的微处理技术有了巨大的发展,直流无刷电机拥有更长的使用寿命,并且运作效率更高,噪声也相对较小,在我国的航空、汽车、家电等诸多领域中有着广泛的应用。
本文主要围绕直流无刷电机控制技术的组成结构,直流无刷电机的工作原理进行分析,探讨基于DSP的直流无刷电机数字控制系统的设计方式,从而推动我国相关技术行业的不断发展关键词:DSP;直流无刷;数字控制;系统设计1.基于DSP的无刷直流电机工作原理通常情况下,永磁式直流无刷电机的定子是由磁钢组成的,它的主要作用是在电机中形成一定的磁场,电机的电枢绕组在通电之后会产生相应的反应磁场,在无刷电机的工作过程中,会进行一定的换向作用,使得电机内部的两个磁场方向在直流电机运行过程中能够保持互相垂直,从而保证直流无刷电机能够进行平稳的运转,在直流无刷电机的工作过程中,电刷能够有效的引导电流的流通,并且在电机电磁导体中,使经过的电磁位置产生相应的信号电流,由于电流能够改变无刷电机的工作方向,因此直流无刷电机的电刷位置,也决定着电机电流交换的位置。
1.1基于DSP的无刷直流电机主体基于DSP的无刷直流电机主体由静止部分和动作部分两部分组成,其中包括定子和转子。
从基于DSP的无刷直流电机的静止部分分析可知其内部包含了定子的绕组和铁芯两部分构成了电机定子。
定子绕组在电机驱动过程中产生电动势并形成电磁场,驱使无刷直流电机的转子部分发生运作,从而形成动力。
在定子传递动力到转子后转子开始旋转,电机内部由于转子的旋转产生磁场。
对转子分析可知其由永磁体、导磁体等支撑件共同组建而成。
1.2基于DSP的无刷直流电机转子位置传感器基于DSP的无刷直流电机的转子内部还设有帮助转子工作以及协助电机运行的传感器。
一般的转子传感器效果没有基于DSP的无刷直流电机的转子位置传感器灵敏,因为基于DSP的无刷直流电机的转子位置传感器能够给帮助无刷电机判断转子的磁极位置,精确地锁定转子的位置并将信息反馈到无刷电机,实现开关电路换相。
基于DSP的无刷直流电机控制系统设计和仿真研究

基于DSP的无刷直流电机控制系统设计和仿真研究一、本文概述随着现代控制理论和电子技术的飞速发展,无刷直流电机(Brushless DC Motor, BLDC)以其高效率、高可靠性以及优良的调速性能,在航空航天、电动汽车、家用电器和工业自动化等众多领域得到了广泛应用。
然而,无刷直流电机的控制涉及复杂的电磁学、电力电子和控制理论,如何实现其高效、稳定的控制成为研究热点。
数字信号处理器(Digital Signal Processor, DSP)作为一种高性能的微处理器,具有强大的数据处理能力和丰富的外设接口,非常适合用于无刷直流电机的控制。
通过DSP,可以实现电机的精确控制,提高电机的运行效率和稳定性。
本文旨在探讨基于DSP的无刷直流电机控制系统的设计和仿真研究。
介绍了无刷直流电机的基本结构和工作原理,分析了其控制难点和关键技术。
详细阐述了基于DSP的电机控制系统的硬件和软件设计,包括功率驱动电路、控制电路、采样电路等硬件设计,以及控制算法、软件架构等软件设计。
通过仿真实验验证了控制系统的可行性和有效性,为无刷直流电机的实际应用提供了理论和技术支持。
本文的研究内容不仅有助于深入理解无刷直流电机的控制原理,也为无刷直流电机的优化设计提供了有益的参考。
本文的研究成果对于推动无刷直流电机控制技术的发展和应用具有一定的理论价值和实际意义。
二、无刷直流电机的基本原理无刷直流电机(Brushless DC Motor, BLDC)是一种采用电子换向技术替代传统机械换向器的直流电机。
其基本原理是利用电子换向器(通常是功率电子开关如MOSFET或IGBT)控制电机的定子电流,从而实现电机的连续旋转,无需机械换向器与电刷之间的物理接触。
这种设计使得无刷直流电机具有更高的效率、更长的寿命以及更低的维护成本。
无刷直流电机通常包含一个永磁体转子和一个带有多个极对的定子。
定子上的极对数量决定了电机的极数,极数越多,电机的旋转越平滑。
基于DSP的直流无刷电机控制
基于DSP的直流无刷电机控制DSP技术(数字信号处理)已经在很多领域得到了广泛的应用,其中之一便是直流无刷电机的控制。
直流无刷电机的控制技术在工业自动化、机器人、电动汽车等领域都有重要的应用价值。
本文将重点介绍基于DSP的直流无刷电机控制技术。
1. 直流无刷电机基本原理直流无刷电机是利用电磁场力以及交流驱动电流来实现转子的旋转运动。
它由定子和转子两部分组成,定子和转子之间的转矩通过对控制电流的调节来实现。
传统的控制方法是利用PWM(脉冲宽度调制)来控制电流,从而控制电机的转速和转矩。
而基于DSP的直流无刷电机控制技术可以更精准地控制电流,进而实现更高效的电机控制。
DSP技术在直流无刷电机控制中的应用主要包括以下几个方面:(1)电流控制:DSP可以通过精确的采样和控制算法,实现对电机电流的精准调节。
可以根据电机的负载情况和所需转矩,动态调整控制电流,以实现更高效的功率输出和更稳定的运行。
(3)位置控制:基于DSP的直流无刷电机控制技术还可以实现对电机位置的闭环控制。
通过接入位置传感器或者利用编码器来实时监测电机的位置,并结合控制算法来实现更加精准的位置控制。
(4)故障检测和保护:DSP可以实现对电机运行过程中的异常情况的监测和检测,并及时采取措施来保护电机和系统的安全。
可以实现对过载、过流、过温等异常情况的检测和保护。
(1)DSP选择:需要选择性能稳定、控制精度高的DSP芯片,常用的有TI的TMS320系列,ADI的ADSP系列等。
(2)传感器选型:需要根据电机的控制需求,选择合适的位置传感器或者编码器,用于实时采集电机的位置、速度等参数。
(3)控制算法设计:需要设计合适的控制算法,包括电流控制、速度控制、位置控制等。
控制算法的设计需要兼顾性能、稳定性和实时性。
(4)系统架构设计:需要设计合理的系统架构,包括DSP和外围设备(传感器、电机驱动器、电源等)的连接和通信方式。
(5)软件开发:需要根据控制需求,开发相应的控制软件,包括控制算法、通信协议、故障处理等。
基于DSP的无刷直流电机控制系统的设计
基于DSP的无刷直流电机控制系统的设计摘要本文围绕无位置传感器无刷直流电机(BLDCM)控制系统设计中的几个关键技术--位置检测、起动和控制方法进行了深入的研究,对无位置传感器无刷直流电机运行方式进行了全面的分析,在此基础上提出了瞬时状态检测与预测估计相结合的转子位置检测新方法,并通过“三段式”方法实现起动。
为了提高系统的调速性能,控制方法采用了转速、电流双闭环。
控制系统设计采用TI公司TMS320LF240x系列的DSP芯片作为控制核心。
借助于DSP强大的处理能力和丰富的外设,整套系统省去了以往复杂的硬件电路,采用结构更加合理的软件,实现了系统的大部分功能,从而提高了系统的可靠性。
实验结果表明,电机起动快速、稳定,具有较宽的调速范围。
同时,该系统还具有结构简单、可靠性高等特点,具有广泛的应用前景。
关键词:无位置传感器;无刷直流电机;位置检测;闭环控制;数字信号处理器;起动Design of Brushless DC motorControl system based on DSPAbstractThis paper mainly study some pivotal techniques—position detection , start and control method, which surrounds brushless DC motor (BLDCM) without position sensor control system's design. On base of analyzing and studying the run mode of BLDCM, we present a new rotor position detection method which was instantaneous state detection combined with state predict , and use " three sect" start method . In order to improve the speeding performance, we adopt the two closed-loop control strategy of speed and current. The MCU of system is the TMS320LF2402 DSP chip. In virtue of powerful processing capacity and plenty peripherals of DSP, the system adopt more reasonable software structure instead of the former complicated hardware circuit, and get better dependability. Experimental results show that the motor start fast and stable with wider area of speeding. This BLCDM control system has the characteristic of simple structure, high dependability, and can be used in many fields. Keywords: Sensor less;Brushless DC motor;Position detection;Closed-loop control;Digital signal processing (DSP);Start目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 研究背景 (1)1.2 研究内容 (3)1.2.1 转子位置检测技术的研究 (3)1.2.2 起动方法的研究 (3)1.2.3 电机控制方法的研究 (4)1.3 本人在课题中承担的工作 (4)第2章系统总体方案设计 (5)2.1 系统总体构成 (5)2.2 无刷直流电机数学模型 (6)2.3 转子位置检测方法的选择 (7)2.3.1 反电势法 (8)2.3.2 电流法 (9)2.3.3 磁链估计法 (10)2.3.4 状态观测器法 (11)2.3.5 人工智能方法 (11)2.4 起动方法的选择 (12)2.4.1 硬件起动电路 (12)2.4.2 预定位起动方式起动 (13)2.4.3 三段式起动 (14)2.5 系统控制核心及控制方法的确定 (15)2.5.1 控制核心的确定 (15)2.5.2 控制方法的确定 (15)2.6 课题中存在的难点和关键技术 (16)第3章关键技术研究 (18)3.1 转子位置检测技术 (18)3.1.1 瞬时状态法原理 (18)3.1.2 反电势过零点预测估计原理 (22)3.2 三段式起动 (24)3.2.1 同步切换技术 (24)3.2.2 电机起动阶段的电压适应技术 (25)3.2.3 假起动现象的形成和辨别 (26)3.3 转速、电流双闭环控制 (27)3.3.1 PID控制原理 (27)3.3.2 双闭环调速系统的设计 (29)3.3.3 PID 的参数整定 (32)3.4 PWM脉宽调制技术 (33)第4章系统硬件设计 (37)4.1 控制系统硬件总体构成 (37)4.2 DSP控制系统硬件设计 (38)4.2.1 DSP最小系统的构成 (38)4.2.2 DSP芯片供电设计 (38)4.3 控制系统功率主电路设计 (39)4.3.1 驱动芯片介绍 (39)4.3.2 功率主回路设计 (40)4.4 转子位置检测电路设计 (40)4.5 3.3V与5V混合逻辑系统设计 (41)4.6 控制显示面板设计 (42)第5章系统软件设计 (44)5.1 DSP软件开发介绍 (44)5.1.1 C编译器概述 (44)5.1.2 DSP的软件开发方法 (45)5.1.3 DSP中断介绍 (47)5.2 系统软件总体结构及设计 (48)5.2.1 系统软件总体结构 (48)5.2.2 主程序设计 (48)5.2.3 紧急停机中断设计 (50)5.2.4 位里检测中断设计 (50)5.2.5 定时器1中断设计 (52)第6章结束语 (53)参考文献 (55)谢辞 (57)第1章绪论1.1 研究背景一个多世纪以来,电动机作为机电能量转换装置,一直在现代化的生产和生活中起着十分重要的作用。
基于DSP的无刷直流电机驱动电路的设计
J I A N G S U U N I V E R S I T Y 基于DSP的无刷直流电机驱动电路的设计学院:电气信息工程学院专业:控制工程姓名:学号:2015年8 月基于DSP的无刷直流电机驱动电路的设计摘要:以TMS320F28335浮点型处理器为控制器,采用IR2136作为驱动芯片,详细设计了三相无刷直流电机的驱动电路,其中包括电源模块、信号隔离模块、三相全桥驱动电路及过流、过压保护电路等,并对电路中的关键参数进行了计算分析和选择。
Design of driver circuit for BLDCM based on DSPAbstract:A three-phase full bridge driver for BLDCM based on the DSP was introduced ,using the IR2136 chip,including the signal isolation module,power supplying circuits,three-phase inverting circuits and current sampling and protecting module.The key parameters of the driver was calculated and selected.关键词:三相无刷直流电机;驱动电路;IR2136;DSPKey words:three-phase BLDCM; driver circuit;IR2136;DSP随着电力电子技术和高性能永磁材料的发展,无刷直流电机的应用在航空航天、医疗、家电及自动化领域获得了迅猛的发展。
无刷电机驱动电路是数字控制电路和无刷直流电机联系的纽带,它采用功率电子开关和霍尔位置传感器代替有刷电机中的电刷和换相器,接收来自数字电路的控制信号,将电流分配给无刷电机定子上的U、V、W三相绕组[1]。
基于DSP的直流电机控制系统设计
摘要近年来,电机控制技术、微电子技术和电力电子技术在快速发展,直流电机由于自身的高性能被大量应用。
直流电机具有结构简单、运行可靠和维护便捷等优点,同时具有输出转矩大、运行效率高的优点,因此在运动控制领域取得广泛应用。
尤其在高性能的运动控制系统中,对无刷直流电机性能的要求一直在提高。
在电机本体优化设计、电力电子设备控制跟控制策略等方面对电机性能进行改善,会产生很大的经济效应。
在大量对无刷直流电机控制系统的发展应用文献调研为基础,本文采用TI公司的TMS320F2812芯片为控制核心,控制对象是直流电机,研究基于DSP的直流电机控制系统。
本文对电机本体的基本结构和控制算法进行分析,研究如何使电机平稳起动,提高系统的调速性能。
其次,根据电机及DSP芯片的特性,得出无刷直流电机闭环控制系统设计方案,由此对硬件和软件进行设计。
硬件部分主要电路包括电源电路、位置检测电路、驱动电路和保护电路;在软件部分根据控制策略,在开发软件CCS中用C语言编写主程序、初始化程序和中断服务程序等模块。
最后给出实际电机控制系统运行时的实验测试情况,给出了转速的实验波形,设计的控制系统能稳定调速,结果比较理想。
关键词:直流电机;DSP;PIDThe Design Of DC Motor Control System Based On DSPABSTRACTIn recent years, with the rapid development of control technology, microelectronics technology and power electronic technology,DC motor has been widely applied because of it’s high performance. DC motor has advantages of convenient maintenance, reliable operation and simple structure, but also has high torque, higher operating efficiency advantages. So it has a wide range of applications in the field of motion control. Specially, in the high-performance motion control, the requirement of performance of DC motor has being improving.Based on researching vast literatures about the application research of DC motor control system development, this document studies the sensor DC motor using DSP, which use theTMS320F2812 chip as a control core and the DC motor as the object. In this document, the basic structure of motor and control algorithm is studied in order to make the motor smooth starting and improve system performance. Besides, according to the characteristic of motor and DSP chip and system’s requirements, the design scheme of DC motor’s control system has been completed. The hardware part includes power supply circuit, current detection circuit, protection circuit and drive circuit. The software part contains main program, initialization program and interruption program. Finally, experimental research is made on the worktable, and got the rotate speed fluctuation. The control system designed is stable in this paper, and it has good speed adjusting performance and a wide speed range.Key words: DC motor; DSP; PID目录1.1课题研究的意义 (4)1.2直流电机调速国内外研究现状 (4)1.2.1 改进调速方法 (5)1.2.2 提高系统性能的控制算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的开关时间由开启时间 ( turn-on de lay tim e) td(on)、上 升时间 ( rise time) tr、关 断 时 间 ( turn-off de lay tim e) td(off) 和 下 降 时 间 ( fa ll time) tf 组成 。
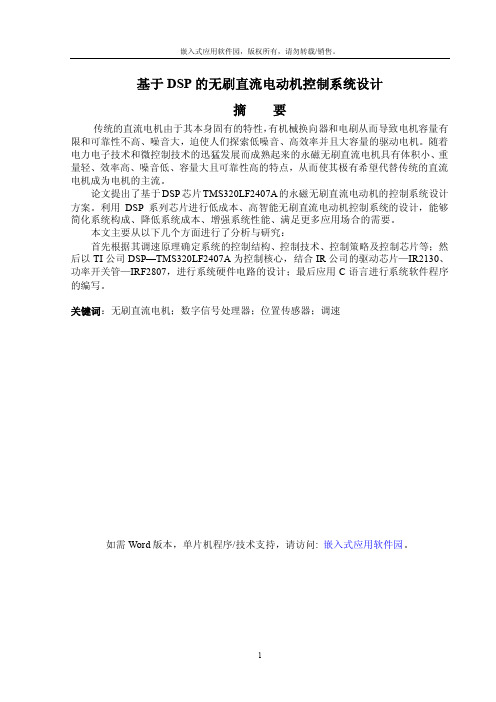
图 2 H 型双极模式 PWM 功率转换电路原理图
基于 DSP 的直流电机驱动控制电路设计
65
同时导通 、同时关断 , 两组晶体管之间是 交替的轮流导通和截止 的 。 亦即基极驱 动信号 ub1 =ub4, ub2 =ub3 = - ub1。 双极模 式工 作时允许电流反向 流通 , 从而保 证电枢 电流始 终是连续 的 。 即 使电机不转动 , 电机电枢两端的瞬时电压也不为零 , 而是宽度相 等的正 、负脉冲电压 。 在电枢回路中流过一个交变的电流 , 使电 动机发生高频颤动 , 有利于减小静摩擦 。
64
《测控技术 》2007年第 26卷第 1期
基于 DSP的直流电机驱动控制电路设计
何存富 , 周 龙 , 宋国荣 , 何守印 , 吴 斌
(北京工业大学 机械工程与应用电子技术学院 , 北京 100022)
摘要 :基于 H 型双极模式 PWM 控制原理 , 设计了一种直流微电 机正反 转调速 功率放大 电路 。 采 用 IR 2110作为 该功率 放 大电路的驱动模块 , 构成的整个驱动电路具有结构简单 、驱动能力强 、功耗低的特点 。 通过 TM S320FL2407A DSP 芯片产 生 驱动电路所需要 的双 PWM 信号 。 同时 , D SP 芯片采集和处理电机 电枢电 流及转 速信号 , 实现 直流电 机的反 馈控制 。 DSP 芯片又通过串口 和 PC机建立通信 , 最终实现通过 PC 机发布指令控制直流电机的运动 。 关键词 :H 型双极模式 PWM 控制 ;功率放大 ;直流电机 ;IR2110;DSP 中图分类号 :TP211 文献标识码 :B 文章编号 :1000 - 8829(2007)01 - 0064 - 04
1 直流电机 PWM 控制原理
脉冲宽度调制 (PWM , pu lse w idth m odulation)装置 [ 2] 是一种 利用大功率晶体管的 开关特性 来调制 固定电压 的直流 电接通 ”
收稿日期 :2006 - 03 - 14 基金项目 :国家自然科学基金资助项目 (10372009) 作者简介 :何存富 (1958— ), 男 , 山西省大 同市人 , 博 士学位 , 副 院长 , 教 授 , 博士生导师 , 主要研究方向为现代测控技术与方法 , 计算机 测试与控 制技术 , 智能仪器与虚拟仪器 , 无损检测新技术 ;周龙 (1981— ), 男 , 湖北 省荆州市人 , 硕士研究生 , 主要研究方向为计算机测试与控制技术 。
本设计采用型号 为 IRF540N 功率 场效应管 , 其 栅极驱 动芯 片采用 IR2110, 设计 了如图 3所 示的驱动 电路 , 其中 , 器件 的选 择是关键 。
图 3 驱动电路总体框图 3. 1 绝缘栅型功率场效应管的选择 3. 1. 1 M O SFET 开关特性
由 MO SFET(场效应管 )构成 的共源 电路中 , 当栅 极驱 动电 压使漏极电流为零时 , 则认 为场效应 管的工 作点位 于夹断 区的 边界上 , 当栅 -源的反偏电压再增大 , M OSFET 的工作点完 全进 入夹断区 。 而当栅极控制电压 使漏 (D) -源 (S)电压变为零时 , 则认为 MO SFET 工作点位于饱和区的边界上 。 当提高栅 (G)极 驱动电压时 , M OSFET的工作 点就完全进入可变电阻区 。
动机的调速控制 。 而这种开关特性对整个驱动电路尤其是功 率
放大管提出了较高要求 。 工作在开关状态的 MO SFET, 由夹断区 到可变电阻 区 , 或 者
相反的过 程 , 也 就是其内部 电荷建立 和消失的过 程 , 因 而 , 需 要 一定的时间 。 共 源电 路的 开关 时间 波形 如图 4 所示 , M O SFET
图 5 死区产生波形图 3. 2 场效应管栅极驱动器件的选 择
随着功率 VM O S器件以 及绝缘 栅双 极晶 体管器 件 ( IGBT)
66
《测控技术 》2007年第 26卷第 1期
的广泛运用 , 更多场 合使 用 VMO S 器件 或 IG BT 器 件组 成桥 式
电路 , 例如开关电源半桥变换器或全桥变换器 、直流无刷电机的 桥式驱动电路 、步 进电 机驱 动电 路以 及逆 变器 的逆 变电 路 [ 3] 。
与 “断开 ”时间的长短 , 通过改变 直流伺服 电动机电枢 上电压 的 “占空比 ”来改变平均电压的大小 , 从而控 制电动 机的转速 。 因 此 , 这 种装置又称为开关驱动装置 。
PWM 控制原理如图 1所 示 。 可控 开关 S(可以 是三 极管 , M OSFET, IG BT 等 )以一定的时间 间隔重复地导通和断 开 。 当 S 导通时 , 供电电 源通过开关 S施加到电动机两端 , 电源向电机 提 供能量 , 电动机储 能 ;当 S断开时 , 切断 了供电电 源向电动机 提 供能量 ;但是 , 在 S导通期间电枢电感所储存的能量此时通过 续 流二极管 VD 使电动机 电流继续流通 。
图 1 PWM 控制原理示意图
2 H 型双极模式 PWM 控制原理
双极模式 PWM 控 制 [ 2] 的特 点是在 一 个开 关周 期内 , 作 用 在导电枢上的电压极性是 正负交 替的 , 双极性 工作模 式由此 得 名。
H 型双极模式 PWM 的 功率 转换电 路如 图 2所 示 。 它 由 4 个大功率晶体管和 4个续流二极 管组成 。 4个大功率 管分为 两 组 , V 1 和 V4 一组 , V2 和 V3 为 另一组 , 同 一组中 的两个 晶体 管
C ircuit Design for D riving and Controlling DC M otor Based on DSP
H E Cun-fu牞ZHOU Long牞SONG Guo-rong牞H E Shou-y in牞W U B in
牗C ollege of M echanical Engineering and A pp lied E lectron ics Technology牞B eijing U nivers ity of Technology牞Bei jing 100022牞Ch ina牘
传动控制系统是通过对电 机的控制 , 将电能转换为机械能 , 并且控制工作机械按给定的运 动规律运动的装置 。 而用直流电 动机作为原动机的传动称为直 流传动 。 由于直流传动系统具有 良好的 启动 、制动 、正反转及 调速等性能 , 目前 在传动领域 仍占 主要地位 。
在机器人技术领 域 , 直流 电机作 为机器 人各关 节或执 行机 构的动力源得到了 广泛的 应用 。 因此 , 机器 人控制 器作为 机器 人信息处理和控制的 主体 , 其设计好 坏将决 定机器 人系统 的整 体行为和整体性能 。 早 期的机 器人 , 特别是 工业机 器人所 采用 的控制系统基本上是 设计者基 于自己 的独立结 构而开 发的 , 它 采用了 专用计算 机 、专 用机器人语 言 、专 用操作系统 、专用 微处 理器 [ 1] 。 本设计基于 通用 DSP 控制 芯片开 发了 直流电 机控 制 驱动卡 , 取得了满意的控制效果 。
PWM 驱动电路就是利用 MO SFET 的开关特性 , 使之交替工 作在 截止 区和饱 和区 , 从 而越过 M O SFET 的 恒流区 , 通 过调 整 占空比的办法来调整 分配在电 动机电 枢两端的 电压 , 达到 对电
图 4 场效应管开关特性 本驱动电路采用型号 IRF540N 的绝 缘栅型 功率场 效应管 , 该管的开关时间值如下 :td(on) =30 ns;tr =60 ns;td(off) =80 ns;tf =30 ns。 该器件的开关频率可达到 1 ~ 2M H z, 能 够满足本系统 的设计要求 。 3. 1. 2 M OSFET 的功耗要求与共态直通 在 PWM 系统中 , M OSFET 的功率损耗是决定 其使用寿命的 重要因 素 , 也 是 衡 量 PWM 驱 动 效 率 的 一个 指 标 。 为 了 保 证 PWM 系统工作安全可靠 , 通常需要使 M OSFET工 作在额定功率 范围之内 。 降低功耗对 M O SFET 的特性参数有以下要求 : ①M OSFET 可变电阻区电压要小 ; ②上升时间 tr 和下降时间 tf 要短 。 而所谓的 “共 态直通 ” [ 2] 是 指 H 型 功率转 换电路中 的功 率 元件 (M O SFET、GTR)在 一 个开 关周 期内 的切 换瞬 间把 主电 源 短路的现象 。 共态直通发生的 原因是由 于功率 元件 (M OSFET、 GTR)开启时间 td(on)的 存在和 基极 驱动的 PWM 信号过 零点 无 延迟而引起的 。 因此 , 要 求功率元 件 (M OSFET、GTR)的开启 时 间尽可能短 , 同 时设计基极驱动电路时 , 应使同侧对管在开关 切 换期 间有 一个共 同休 止的延 时死 区 。 图 5 为死 区驱动 信号 波 形。