54-3 极坐标图(绘制)
极坐标方程画图步骤
极坐标方程画图步骤极坐标方程是一种描述平面上点位置的数学表达式,它使用极径和极角来确定点的坐标。
通过极坐标方程,我们可以绘制出各种有趣的图形,如螺旋线、圆形、心形等。
本文将介绍使用极坐标方程画图的步骤。
步骤一:了解极坐标系在开始之前,我们需要了解什么是极坐标系。
在直角坐标系中,我们使用x轴和y轴来确定点的位置。
而在极坐标系中,我们使用极径(r)和极角(θ)来确定点的位置。
极径表示点与原点的距离,极角表示点与x轴的夹角。
步骤二:确定极坐标方程确定要绘制的图形后,我们需要确定相应的极坐标方程。
不同的图形具有不同的极坐标方程,下面是一些常见的示例:圆形圆形的极坐标方程是简单的,它只需要一个参数-半径(r)。
极坐标方程表示为:r = a(a为常数),它表示距离原点a单位距离的所有点构成的圆。
螺旋线螺旋线的极坐标方程是:r = aθ(a为常数)。
螺旋线是围绕原点旋转并向外扩展的曲线。
心形线心形线的极坐标方程是:r = a(1 - sinθ)(a为常数)。
它的曲线形状类似于心形。
根据要绘制的图形的特点,选择相应的极坐标方程。
步骤三:确定参数范围在绘制图形之前,我们需要确定参数的范围。
根据极坐标方程的性质,选择适当的参数范围可以确保图形被完整地绘制出来。
一般来说,极坐标方程中的θ取值范围是0到2π(一周的范围),r的取值范围取决于具体的图形。
步骤四:绘制图形有了极坐标方程和参数范围,我们就可以开始绘制图形了。
首先,选择一个合适的坐标系,即绘制图形的画布。
可以使用绘图软件或手工绘制,根据具体情况选择。
然后,根据极坐标方程和参数范围,在坐标系上取一系列的θ值,并计算对应的r值。
最后,将计算得到的极坐标转换为直角坐标,并绘制出相应的点。
重复以上步骤,直到绘制出完整的图形。
步骤五:添加细节一般情况下,我们还可以添加一些细节来美化图形。
可以调整线条的颜色、粗细和样式,使图形更加醒目。
还可以添加标题、坐标轴标签等,方便观察和理解图形。
02坐标系统和图层

(一)绘图单位
(1)屏幕单位:图形中实体的位置是由坐标来确定的,而其大 小(如长度)则以距离来确定的。
例:
(2,1)
(3,1)
常称该长度为一个屏幕单位。
“1”个屏幕单位究竟表示多长,则由后面的单位 或单位制来确定。它既可表示1mm,也可表示为 1Km。 在计算机显示屏幕上,不论你选用什么单位,AB直线的视觉大小是一样的,我们把这种屏幕上所显 示的“1”个长度单位称为“屏幕单位”。
•图层的创建及取名
• 演示图层的创建过程及命名 • 命名规则 1)便于理解图层的分类及用途 2)名称最多可以包含 255 个字符。除了字母和 数字以外,名称中还可以包含空格和特殊字符, 不能使用的特殊字符包括大于和小于号 (< >)、斜 杠和反斜杠 (/ \)、引号 (“)、冒号 (:)、分号 (;)、问 号 (?)、逗点 (,)、星号 (*)、竖杠 (|)、等号 (=) 和 反引号。 3)不能使用 Unicode 字体创建的特殊字符。 • 一个图样中根据需要可创建不受限制的图层
命 令
AutoCAD所执行的每一个操作几乎都建立在相 应命令的基础之上。命令告诉AutoCAD要完成什么 操作,AutoCAD将对命令做出响应并在命令提示中 显示执行状态或给出执行命令需要进一步选择的选 项。
一、一般命令的输入方法 二、命令的终止方式
一般命令的输入方法
单击工具按钮:用鼠标在工具条上单击代表相应
复习:
P11点的输入方式
AutoCAD绘图时,经常要确定一些点的位置, 如线段的端点,圆的圆心等。一般可以用以下方式 输入一个点。 1、用鼠标在屏幕上拾取点。 2、用目标捕捉方式确定一些特殊点(如线段的端点, 圆的圆心和切点等)。 3、通过键盘输入点的坐标。 4、在指定方向上通过给定距离确定点。这是指定第 二点的方法之一,首先移动光标指出方向,然后输 入距离。 5、跟踪得到一些点。
第五章 频域响应法
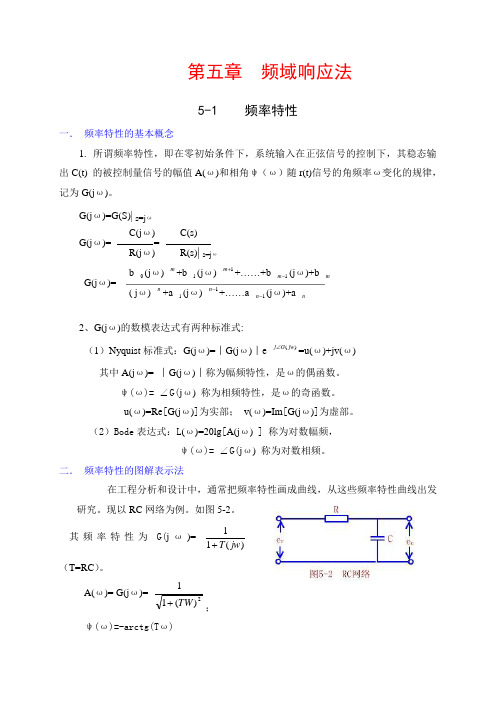
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
极坐标及参数方程
龙文教育一对一个性化辅导教案1.极坐标系(1)极坐标系的建立:在平面上取一个定点O ,叫做________,从O 点引一条射线Ox ,叫做________,再选定一个长度单位、一个角度单位(通常取弧度)及其正向(通常取逆时针向),这样就确定了一个极坐标系.设M 是平面一点,极点O 与点M 的距离OM 叫做点M 的________,记为ρ,以极轴Ox 为始边,射线OM 为终边的角叫做点M 的极角,记为θ.有序数对(ρ,θ)叫做点M 的极坐标,记作M (ρ,θ).(2)极坐标与直角坐标的关系:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,设M 是平面任意一点,它的直角坐标是(x ,y ),极坐标为(ρ,θ),则它们之间的关系为x =______,y =________.另一种关系为ρ2=________,tan θ=________. 2.简单曲线的极坐标程 (1)直线的极坐标程θ=α (ρ∈R )表示过极点且与极轴成α角的直线; ρcos θ=a 表示过(a,0)且垂直于极轴的直线; ρsin θ=b 表示过⎝⎛⎭⎫b ,π2且平行于极轴的直线;ρsin(α-θ)=ρ1sin(α-θ1)表示过(ρ1,θ1)且与极轴成α角的直线程. (2)圆的极坐标程ρ=2r cos θ表示圆心在(r,0),半径为|r |的圆; ρ=2r sin θ表示圆心在⎝⎛⎭⎫r ,π2,半径为|r |的圆;ρ=r 表示圆心在极点,半径为|r |的圆. 3.曲线的参数程在平面直角坐标系xOy 中,如果曲线上任意一点的坐标x ,y 都是某个变量t 的函数⎩⎨⎧x =f (t ),y =g (t ).并且对于t 的每一个允值上式所确定的点M (x ,y )都在这条曲线上,则称上式为该曲线的________________,其中变量t 称为________. 4.一些常见曲线的参数程(1)过点P 0(x 0,y 0),且倾斜角为α的直线的参数程为________________(t 为参数). (2)圆的程(x -a )2+(y -b )2=r 2的参数程为________________________(θ为参数).(3)椭圆程x 2a 2+y 2b2=1(a >b >0)的参数程为________________(θ为参数).(4)抛物线程y 2=2px (p >0)的参数程为________________(t 为参数).1.在极坐标系中,直线ρsin(θ+π4)=2被圆ρ=4截得的弦长为________.2.极坐标程ρ=sin θ+2cos θ能表示的曲线的直角坐标程为____________________.3.已知点P (3,m )在以点F 为焦点的抛物线⎩⎨⎧x =4t 2,y =4t (t 为参数)上,则PF =________.4.直线⎩⎨⎧x =-1+t sin 40°,y =3+t cos 40°(t 为参数)的倾斜角为________.5.已知曲线C 的参数程是⎩⎨⎧x =3t ,y =2t 2+1(t 为参数).则点M 1(0,1),M 2(5,4)在曲线C 上的是________.题型一 极坐标与直角坐标的互化例1 在直角坐标系xOy 中,以O 为极点,x 轴正半轴为极轴建立极坐标系.曲线C 的极坐标程为ρcos(θ-π3)=1,M ,N 分别为C 与x 轴、y 轴的交点. (1)写出C 的直角坐标程,并求M 、N 的极坐标;(2)设MN 的中点为P ,求直线OP 的极坐标程.思维升华 直角坐标程化为极坐标程,只需把公式x =ρcos θ及y =ρsin θ直接代入并化简即可;而极坐标程化为直角坐标程要通过变形,构造形如ρcos θ,ρsin θ,ρ2的形式,进行整体代换.其中程的两边同乘以(或同除以)ρ及程两边平是常用的变形法.但对程进行变形时,程必须保持同解,因此应注意对变形过程的检验.在极坐标系中,已知圆ρ=2cos θ与直线3ρcos θ+4ρsin θ+a =0相切,数a 的值.题型二 参数程与普通程的互化例2 已知两曲线参数程分别为⎩⎨⎧x =5cos θ,y =sin θ(0≤θ<π)和⎩⎪⎨⎪⎧x =54t 2,y =t(t ∈R ),求它们的交点坐标.思维升华 (1)参数程化为普通程常用的消参技巧有代入消元、加减消元、平后再加减消元等.对于与角θ有关的参数程,经常用到的公式有sin 2θ+cos 2θ=1,1+tan 2θ=1cos 2θ等.(2)在将曲线的参数程化为普通程时,还要注意其中的x ,y 的取值围,即在消去参数的过程中一定要注意普通程与参数程的等价性.将下列参数程化为普通程.(1)⎩⎪⎨⎪⎧x =2t 21+t2,y =4-2t21+t2(t 为参数);(2)⎩⎨⎧x =2-4cos 2θ,y =-1+sin 2θ(θ为参数).题型三 极坐标、参数程的综合应用例3 在直角坐标平面,以坐标原点O 为极点,x 轴的正半轴为极轴,建立极坐标系.曲线C 的极坐标程是ρ=4cos θ,直线l 的参数程是⎩⎪⎨⎪⎧x =-3+32t ,y =12t (t 为参数),M ,N 分别为曲线C 、直线l 上的动点,求MN 的最小值.思维升华 涉及参数程和极坐标程的综合题,求解的一般法是分别化为普通程和直角坐标程后求解.转化后可使问题变得更加直观,它体现了化归思想的具体运用.(2013·)在直角坐标系xOy 中,以O 为极点,x 轴正半轴为极轴建立极坐标系.圆C 1,直线C 2的极坐标程分别为ρ=4sin θ,ρcos ⎝⎛⎭⎫θ-π4=2 2.(1)求C 1与C 2交点的极坐标;(2)设P 为C 1的圆心,Q 为C 1与C 2交点连线的中点.已知直线PQ 的参数程为⎩⎪⎨⎪⎧x =t 3+a ,y =b 2t 3+1(t ∈R 为参数),求a ,b 的值.【知识复习】 选修1-11、选择题(本大题12小题,每小题5分,共60分) 1.程x =1-4y 2所表示的曲线是( )A .双曲线的一部分B .椭圆的一部分C .圆的一部分D .直线的一部分2.若抛物线的准线程为x =-7,则抛物线的标准程为( ) A .x 2=-28y B .x 2=28y C .y 2=-28x D .y 2=28x3.双曲线x 2a 2-y 2b2=1的两条渐近线互相垂直,那么该双曲线的离心率是( )A .2 B. 3 C. 2 D.324.用a ,b ,c 表示三条不同的直线,γ表示平面,给出下列命题:①若a ∥b ,b ∥c ,则a ∥c ;②若a ⊥b ,b ⊥c ,则a ⊥c ;③若a ∥γ,b ∥γ,则a ∥b ;④若a ⊥γ,b ⊥γ,则a ∥b .其中真命题的序号是( )A .①②B .②③C .①④D .③④ 5.已知a 、b 为不等于0的实数,则a b>1是a >b 的( ) A .充分不必要条件B .必要不充分条件 C .充要条件 D .既不充分又不必要条件6.若抛物线y 2=4x 的焦点是F ,准线是l ,点M (4,m )是抛物线上一点,则经过点F 、M 且与l 相切的圆一共有( )A .0个B .1个C .2个D .4个7.若双曲线x 2a 2-y 2b2=1 (a >0,b >0)的左、右焦点分别为F 1,F 2.线段F 1F 2被抛物线y 2=2bx 的焦点分成5∶3两段,则此双曲线的离心率为( )A. 3B. 6C.233D.2638.已知双曲线与椭圆x 29+y 225=1共焦点,它们的离心率之和为245,则此双曲线程是( )A.x 212-y 24=1 B .-x 212+y 24=1C.x 24-y 212=1 D .-x 24+y 212=1 9.下列四个结论中正确的个数为( )①命题“若x 2<1,则-1<x <1”的逆否命题是“若x >1或x <-1,则x 2>1”; ②已知p :∀x ∈R ,sin x ≤1,q :若a <b ,则am 2<bm 2,则p ∧q 为真命题; ③命题“∃x ∈R ,x 2-x >0”的否定是“∀x ∈R ,x 2-x ≤0”; ④“x >2”是“x 2>4”的必要不充分条件.A .0个B .1个C .2个D .3个10.设f (x )=x (ax 2+bx +c ) (a ≠0)在x =1和x =-1处有极值,则下列点中一定在x 轴上的是( ) A .(a ,b ) B .(a ,c ) C .(b ,c ) D .(a +b ,c ) 11.函数y =ln xx的最大值为( )A .e -1B .eC .e 2D.10312.已知命题P :函数y =log 0.5(x 2+2x +a )的值域为R ;命题Q :函数y =-(5-2a )x是R 上的减函数.若P 或Q 为真命题,P 且Q 为假命题,则实数a 的取值围是( )A .a ≤1B .a <2C .1<a <2D .a ≤1或a ≥2二、填空题(本大题共4小题,每小题5分,共20分)13.若函数f (x )=x 3+x 2+mx +1是R 上的单调函数,则m 的取值围是________.14.一动圆圆心在抛物线x 2=8y 上,且动圆恒与直线y +2=0相切,则动圆必过定点________.15.已知F 1、F 2是椭圆C x 2a 2+y 2b2=1 (a >b >0)的两个焦点,P 为椭圆C 上一点,PF 1→⊥PF 2→.若△PF 1F 2的面积为9,则b =________.16.设f (x )、g (x )分别是定义在R 上的奇函数和偶函数,当x <0时,f ′(x )g (x )+f (x )g ′(x )>0,且g (-3)=0,则不等式f (x )g (x )<0的解集是________________________________________________________________________. 三、解答题(本大题共6小题,共70分)17.(10分)已知p :x 2-12x +20<0,q :x 2-2x +1-a 2>0 (a >0).若綈q 是綈p 的充分条 件,求a 的取值围.18.(12分)已知函数f (x )=x 3+bx 2+cx +d 在(-∞,0)上是增函数,在[0,2]上是减函数,且程f (x )=0的一个根为2. (1)求c 的值; (2)求证:f (1)≥2.19.(12分) 如图,M 是抛物线y 2=x 上的一个定点,动弦ME 、MF 分别与x 轴交于不同的点A 、B ,且|MA |=|MB |.证明:直线EF 的斜率为定值.20.(12分)命题p :关于x 的不等式x 2+2ax +4>0,对一切x ∈R 恒成立,命题q :指数函数f (x )=(3-2a )x是增函数,若p 或q 为真,p 且q 为假,数a 的取值围.21.(12分)已知函数f (x )=ax -ln x ,若f (x )>1在区间(1,+∞)恒成立,数a 的取值围.22.(12分)如图所示,已知直线l :y =kx -2与抛物线C :x 2=-2py (p>0) 交于A ,B 两点,O 为坐标原点,OA →+OB →=(-4,-12). (1)求直线l 和抛物线C 的程;(2)抛物线上一动点P 从A 到B 运动时,求△ABP 面积的最大值.选修1-2,4-1题型一圆的切线的判定与性质例3如图,在Rt△ABC中,∠C=90°,BE平分∠ABC交AC于点E,点D在AB上,DE⊥EB,且AD =23,AE=6.(1)判断直线AC与△BDE的外接圆的位置关系;(2)求EC的长.(2013·改编)如图,AB是圆O的直径,点C在圆O上,延长BC到D使BC=CD,过C作圆O的切线交AD于E.若AB=6,ED=2,求BC的长.题型二与圆有关的比例线段例4(2012·)如图,⊙O和⊙O′相交于A,B两点,过A作两圆的切线分别交两圆于C,D两点,连结DB并延长交⊙O于点E.证明:(1)AC·BD=AD·AB;(2)AC=AE.思维升华(1)应用相交弦定理、切割线定理要抓住几个关键容:如线段成比例与相似三角形、圆的切线及其性质、与圆有关的相似三角形等.(2)相交弦定理、切割线定理主要用于与圆有关的比例线段的计算与证明.解决问题时要注意相似三角形知识及圆角、弦切角、圆的切线等相关知识的综合应用.如图,⊙O的半径OB垂直于直径AC,M为AO上一点,BM的延长线交⊙O于N,过N点的切线交CA 的延长线于P.(1)求证:PM2=PA·PC;(2)若⊙O的半径为23,OA=3OM,求MN的长.19.某厂采用新技术改造后生产甲产品过程中记录的产量x(吨)与相应的成本y(万元)的几组对照数x 3 4 5 6y 3 3.5 4.5 5(2)请根据上表提供的数据,用最小二乘法求出y关于x的线性回归程y=b x+a;(3)已知该厂技改前生产50吨甲产品的生产成本为40万元.试根据(2)求出的线性回归程,预测生产50吨甲产品的生产成本比技改前降低多少万元?(参考数据:42186iix==∑42166.5iiy==∑4175.5i iix y==∑,1221ni iiniix y nx ybx nx∧==-=-∑∑)20.某研究机构对高三学生的记忆力x和判断力y进行统计分析,得下表数据:x 6 8 10 12y 2 3 5 6(1)请在图中画出上表数据的散点图;=+;(2)请根据上表提供的数据,用最小二乘法求出y关于x的线性回归程y bx a(3)试根据(2)求出的线性回归程,预测记忆力为9的同学的判断力.21.心理学家分析发现视觉和空间能力与性别有关,某数学兴趣小组为了验证这个结论,从兴趣小组中按分层抽样的法抽取50名同学(男30女20),给所有同学几题和代数题各一题,让各位同学自由选择一道题进行解答.选题情况如下表:(单位:人)(1)能否据此判断有97.5%的把握认为视觉和空间能力与性别有关?(2)经过多次测试后,甲每次解答一道几题所用的时间在5—7分钟,乙每次解答一道几题所用的时间在6—8分钟,现甲、乙各解同一道几题,求乙比甲先解答完的概率.(3)现从选择做几题的8名女生中任意抽取两人对她们的答题情况进行全程研究,记甲、乙两女生被抽到的人数为X,求X的分布列及数学期望E(X).附表及公式22.为调查某地区老年人是否需要志愿者提供帮助,用简单随机抽样法从该地区调查了500位老人,结果如下面表中所示:是否需要帮助性别男女合计需要50 25 75不需要200 225 425合计250 250 500(1)请根据上表的数据,估计该地区老年人中,需要志愿者提供帮助的老年人的比例;](2)能否在出错的概率不超过1%的前提下,认为该地老年人是否需要帮助与性别有关?并说明理由;(3)根据(2)的结论,你能否提出更好的调查法来估计该地区的老年人中,需要志愿者提供帮助的老年人的比例?并说明理由.附:独立性检验卡统计量22()()()()()n ad bcKa b c d a c b d-=++++,其中n a b c d=+++为样本容量,独立性检验临界值表为:2()P K k≥0.15 0.10 0.05 0.025 0. 0.005 0.001 k 2.072 2.706 3.841 5. 6.635 7.879 10.828。
自动控制原理的MATLAB仿真与实践第5章 线性系统的频域分析
函数模型,如:tf(), zpk(), ss()。 bode(num,den):num,den分别为传递函数的分子与
margin(G);[Gm,Pm,Wcg,Wcp]= margin(G): 直接求出系统G的幅值裕度和相角裕度。 其中:Gm幅值裕度;Pm相位裕度;Wcg幅值裕度 处对应的频率ωc;Wcp相位裕度处对应的频率ωg。
nichols(G);nichols(G,w):绘制单位反馈系统开环传 递尼科尔斯曲线。
20
>>clear; num=[2, 3];den=[1, 2, 5, 7]; %G(s)的分子分母 多项式系数向量
p=roots(den) 求根结果:
%求系统的极点
p=
-0.1981 + 2.0797i
-0.1981 - 2.0797i
-1.6038 可见全为负根,则s右半平面极点数P=0。 绘制Nyquist曲线: >> nyquist(num,den) %绘制Nyquist曲线
本节分别介绍利用MATLAB进行频域绘图和频 率分析的基本方法。
6
5.2.1 Nyquist曲线和Bode图
MATLAB频率特性包括幅频特性和相频特性。 当用极坐标图描述系统的幅相频特性时,通常称为 奈奎斯特(Nyquist)曲线;用半对数坐标描述系 统的幅频特性和相频特性时,称为伯德(Bode) 图;在对数幅值-相角坐标系上绘制等闭环参数( M和N)轨迹图,称为尼克尔斯(Nichols)图。
大数据工程技术人员初级理论考核试题与答案

大数据工程技术人员初级理论考核一、选择题1.下列哪个选项不属于数据可视化的范畴()。
[单选题] *A.科学可视化B.图表可视化√C.信息可视化D.可视化分析2.下列哪个选项不属于最为常见的六种图形()。
[单选题] *A.饼图B.条形图C.树图√D.柱状图3.下列()可视化图表通常用颜色深浅表示数值大小[单选题] *A.柱状图B.热力图√C.散点图D.气泡图4.数据集合中出现次数最多的数值被称为()[单选题] *A.平均数B.众数√D.极差5.()指总体中的最大值与最小值的差,反映总体标志值的差异范围。
[单选题] *A.极差√B.方差C.标准差D.离散系数6.分析买家购买商品时产生流量和金额的各渠道情况需要细分()[单选题] *A.终端B.时间C.地区D.品类√7.统计时间内支付金额/支付买家数(或商品件数),衡量统计时间内每位买家的消费金额大小是()指标[单选题] *A.支付金额√B.买家数C.单价D.客单价8.平均停留时长和跳失率都是()的分析内容[单选题] *A.交易分析B.流量分析√C.访客分析9.商品分析中的重点商品选择可以借助()方法[单选题] *A.回归分析B.相关分析C.漏斗分析D.ABC分类√10.ABC分类中畅销的、库存周转率高的高价值商品为()[单选题] *A.B类B.C类C.A类√D.都不属于11.流量质量评估采用()作为衡量流量有效性的宏观指标[单选题] *A.访客数B.转化率√C.浏览量D.浏览时长12.据Ward M O(2010)的研究,超过()的人脑功能用于视觉信息的处理,视觉信息处理是人脑的最主要功能之一。
[单选题] *A.30%B.50%√C.70%D.40%13.当前,市场上已经出现了众多的数据可视化软件和工具,下面工具不是大数据可视化工具的是()。
[单选题] *A.T ableauB.DatawatchC.PlatforaD.Photoshop√14.从宏观角度看,数据可视化的功能不包括()。
高二数学极坐标系

题组二:在极坐标系里描出下列各点
A(3, 0) 4 D(5, ) 3 5 G (6, ) 3 B(6, 2 ) 5 E (3, ) 6 C (3, ) 2 F (4, )
2
5 6
4
E F O
C A B X
4 3
D
G
5 3
四、极坐标系下点与它的极坐标的 P 对应情况
[1]给定(,),就可以在 极坐标平面内确定唯一的 一点M。
M 如图:OM的长度为4, 4 请说出点M的极坐标的其 他表达式。 O X 思:这些极坐标之间有何异同? 极径相同,不同的是极角 思考:这些极角有何关系? 这些极角的始边相同,终边也相同。也 就是说它们是终边相同的角。
π 2kπ+ 4, 本题点M的极坐标统一表达式: 4
1 ( 3 )2
2 2
3 tan 3 1
极坐标与直角坐标的互化关系式: 设点M的直角坐标是 (x, y) 极坐标是 (ρ,θ)
y x y , tan ( x 0) x
2 2 2
x=ρcosθ, y=ρsinθ
互化公式的三个前提条件:
1. 极点与直角坐标系的原点重合; 2. 极轴与直角坐标系的x轴的正半
题组一:说出下图中各点的极坐标
2
5 6
C E D O B A X
4
4 3
F
G
5 3
特别规定: 当M在极点时,它的 极坐标=0,可以取任意值。
想一想?
①平面上一点的极坐标是否唯一? ②若不唯一,那有多少种表示方法? ③坐标不唯一是由谁引起的?
④不同的极坐标是否可以写出统一表达式?
利用 TI 图形计算器绘制美丽的极坐标曲线
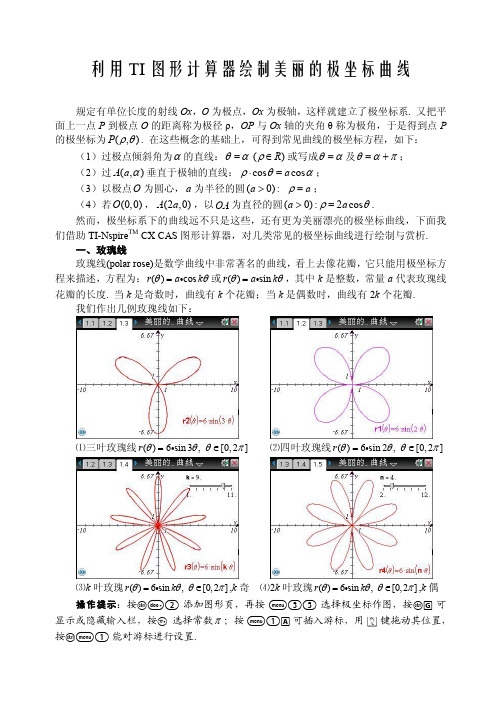
利用 TI 图形计算器绘制美丽的极坐标曲线规定有单位长度的射线 Ox ,O 为极点,Ox 为极轴,这样就建立了极坐标系. 又把平 面上一点 P 到极点 O 的距离称为极径 ρ,OP 与 Ox 轴的夹角 θ 称为极角,于是得到点 P 的极坐标为 (,) P r q . 在这些概念的基础上,可得到常见曲线的极坐标方程,如下:(1)过极点倾斜角为a 的直线: () R q a r =Î 或写成q a = 及q a p =+ ;(2)过 (,) A a a 垂直于极轴的直线: cos cos a r q a ×= ;(3)以极点O 为圆心,a 为半径的圆(0): a > a r = ;(4)若 (0,0) O , (2,0) A a ,以OA 为直径的圆(0):2cos a a r q >= .然而,极坐标系下的曲线远不只是这些,还有更为美丽漂亮的极坐标曲线,下面我们借助 TINspire TM CX CAS 图形计算器,对几类常见的极坐标曲线进行绘制与赏析.一、玫瑰线玫瑰线(polar rose)是数学曲线中非常著名的曲线,看上去像花瓣,它只能用极坐标方 程来描述,方程为: ()cos r a k q q = g 或 ()sin r a k q q = g ,其中 k 是整数,常量 a 代表玫瑰线 花瓣的长度. 当 k 是奇数时,曲线有 k 个花瓣;当 k 是偶数时,曲线有 2k 个花瓣. 我们作出几例玫瑰线如下:⑴三叶玫瑰线 ()6sin 3,[0,2] r q q q p =Î g ⑵四叶玫瑰线 ()6sin 2,[0,2] r q q q p =Î g⑶k 叶玫瑰 ()6sin ,[0,2] r k q q q p =Î g ,k 奇 ⑷2k 叶玫瑰 ()6sin ,[0,2] r k q q q p =Î g ,k 偶 操作提示:按/~2 添加图形页,再按 b33 选择极坐标作图,按/G 可 显示或隐藏输入栏,按¹ 选择常数p ;按 b1A 可插入游标,用x 键拖动其位置, 按/b1 能对游标进行设置.进一步作出 ()cos r a n q q = g 的各种情形如下:二、圆盘线玫瑰线的极坐标方程 ()cos r a k q q = g 或 ()sin r a k q q = g 中,如果 k 为非整数,将产生圆 盘(disc)状图形,且花瓣数也为非整数. 我们作出几例圆盘线如下:⑴ ()6sin ,[0,4] 2 r q q q p =Î g ⑵ ()6sin ,[0,24] r nq q q p =Î g⑶ 12 ()6sin ,[0,10] 5r q q q p =Î g ⑷ ()6sin ,[0,30] r q pq q p =Î g , 操作提示:按/~2 添加图形页,再按 b33 选择极坐标作图,按/G 可 显示或隐藏输入栏,按¹ 选择常数p ;按 b1A 可插入游标,用x 键拖动其位置, 按/b1 能对游标进行设置;按/p 调用分式符号.进一步作出 ()cos n r mq q = 及 ()6sin r q pq = g 的各种情形如下:⑴ ()cos n r mq q = ⑵ ()6sin , r q pq q = g 在以上各区间 三、螺线螺线即螺旋线,它可以这样定义:在平面极坐标系中,如果极径 ρ 随极角 θ 的增加 而成比例增加(或减少),这样的动点所形成的轨迹叫做螺线. 螺线也可以理解为由两种 运动形成. 设想一个虫子站在匀速旋转的圆盘之上,从圆心沿某个半径向外爬行,它的影 子会在天花板上绘出一条螺线. 螺线在实际生产中有一些应用, 例如有些凸轮的轮廓线和 三爪卡盘的轨线都是等速螺线;对数螺线在刀具的设计,航行导向等方面,也有它重要 的应用. 螺线有许多中,下面研究常见几种.1. 阿基米德螺线.阿基米德螺线又称“等速螺线”. 当一点 P 沿动射线OP 用速度 v 做等速率直线运动 的同时,这条射线又以等角速度 ω 绕点 O 旋转,点 P 的轨迹称为“阿基米德螺线” ,其 极坐标表示式是:r (θ)=aθ,这里 a 为实数. 阿基米德螺线在极坐标中通用方程形式是: r (θ) = a +bθ,改变参数 a 将改变螺线形状,b 控制螺线间距离,通常其为常量.⑴ (),[0,6]r a q q q p =Î g ⑵ ()20,[0,20]r q q q p =Î g 2. 渐开螺线. 渐开螺线也有许多,例如:双曲螺线,又称倒数螺线,方程形式为 (), a r q q= 其中 a 为常数,它是极径与极角成反比的点的轨迹,图像的特征是有一条平行于极轴的渐近线;连锁螺线,又称平方倒数螺线,方程形式为 (), a r q q =其中 a 为常数;等角螺线,又称对数螺线,方程形式为 (), a r e q q = g 其中 a 为常数. 我们作出几例渐开螺线如下:⑴ 双曲螺线 1 (),[0.5,30] r q q q =Î ⑵ 连锁螺线 1(),[0.1,40]r q q q =Î⑶ 等角螺线 0.4 (),[0,10] r e q q q p =Î ⑷ 等角螺线 ()2,[0,10]r q q q p =Î 操作提示:按/~2 添加图形页,再按 b33 选择极坐标作图,按/G 可 显示或隐藏输入栏;按b4A 选择适合窗口或按b4 再选择其它窗口模式. 等角 螺线中,e 不是自然科学常数,而是离心率,所以不能按¹键得到,而需要按字母键 E .四、圆锥曲线圆锥曲线方程如下:r (θ) = l / (1-e *cosθ) ,其中 l 表示半径,e 表示离心率. 如果 e < 1,曲线为椭圆;如果e = 1,曲线为抛物线;如果e > 1,则表示双曲线. 方程形式也可以 为 r (θ) =e *p / (1-e *cosθ) ,其中 e 表示离心率,p 表示焦点到准线的距离. 试看如下图:操作提示:用x 键选择游标,指针变{,按/b1 对游标设置,步长设为 0.2.五、其它曲线漂亮的极坐标曲线还有许多, 我们多尝试, 必然会有层出不穷的发现. 赏析几例如下:⑴ 钉螺线 25 ()sin ,[0,80] 23 r q q q q =Î g ⑵ 莲花线 3 5 ()sin sin ,[0,4] 2r q q q q p =+Î⑶ 单页贝壳线 ()sin ,[0,20] r q q q q p =Î g ⑷ 双页贝壳线 ()sin ,[15,15] r q q q q p p =Î- g⑸ 心形线 ()2(1sin ),[0,2] r q q q p =+Î ⑹ ()6sin(cos ),[0,10]r q q q q p =Î g⑺ 蔓叶线 ()tan sin ,[0,2] r q q q q p =Î g ⑻ 蚌线 1 ()2,[0,2] cos r q q p q=+Î⑼ 蜗线 ()32cos ),[0,2] r q q q p =+Î ⑽ 钳线 ()23cos ),[0,2]r q q q p =+Î⑾ 四叶草线 ()sin cos ,[0,2] r q q q q p =Î g ⑿ 费马螺线 12(),[0,10] r q q q p =Î 操作提示:用x 键选择图像,指针变 ø,按/b6 可修改曲线方程.小结语:高中数学学习阶段,对极坐标的学习要求比较低,仅限于掌握极坐标与直角坐标的 互化,掌握简单曲线(直线、圆)的极坐标方程. 笔者在此用 TI 图形计算器,绘制了各 种漂亮的极坐标曲线,体现了数学之美,也激发同学们升入大学进一步深入学习与研究. (作者:高建彪 邮箱:dsgjb@ ,QQ:76456245 2011年 5 月28 日完稿于中山市东升高中) *****如果您发现了更为漂亮的极坐标曲线,敬请将其方程形式发至邮箱,谢谢您的支持.******。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§5.3 开环系统(Nyquist)(8)
K 例5:G1 ( s ) 2 s (T1 s 1)( T2 s 1)
G1 ( j 0) 180
G1 G1
G1 ( j) 0 360
K ( s 1) G2 ( s ) 2 s (T1 s 1)( T2 s 1)( T3 s 1)
网址:
ω =0+
Im
ω =∞
K ω=0 Re 0 ω=
ω =0+
网址: 奈氏曲线 =∞处是原点,切入方向根据零、极点确定,即:
《自动控制理论》
N-M=3、7
N(-90°) +M(90°) 求奈氏曲线与实轴的交点: 令虚部为零,得到 代入实部而得 系统开环频率特性的绘制小结:
1
1 (T ) 2
90 arctgT
低频部分为:G( j0) 90 高频部分为:G( j) 0 180
-2
-1
0 1 Real Axis
2
3
《自动控制理论》
网址:
§5.3 开环系统(Nyquist)(2)
G(j ) G( j ) e j( )
A() A1()A2()A n() ( ) 1( ) 2( ) n( ) ,
典型环节频率特性极坐标图的大致走向
ω =0 K ∞ 1 1 1
K 1/jω T 1+jω T 1/(1+jω T) 1/(1-ω 2 T2 +j2ζ ω T)
A(ω ) ω =1/T K 1 1.414 0.707 1/2ζ
G
1
2 2 2 [1 2 ] [ 2 ] n n
2
n G arctan 2 1- 2 n
《自动控制理论》
网址:
课程回顾(3)
⑴ G( j ) K ⑵ G( j ) j ⑶ G( j ) 1 j ⑷ G( j ) 1 ( 1 jT) ⑸ G( j ) 1 jT
G2 ( j 0) 180
G2 G2 ( 180 0 )
G2 G2 ( 180 )
G2 (论》
网址:
§5.3 开环系统(Nyquist)(8)
s3 s3 G 例6: ( s ) ( s 0.2)( s 1)( s 5) (1 5 s )(1 s )(1 0.2 s )
《自动控制理论》
网址:
课程回顾(1)
G( j ) K
G K G 0 G G 90 G 1 G 90
⑴ 比例环节 G( s) K ⑵ 微分环节 G( s ) s
1 ⑶ 积分环节 G ( s ) s
G( j ) j
G( j 0) 90 G( j) 0 270
渐近线:
Re[G( j 0)] 15
Im[ G( j )] 0 与实轴交点:
1
2 0.707
15 10 Re[G ( j 0.707)] (1 0.5)(1 4 0.5) 3
《自动控制理论》
最小相位系统与非最小相位系统 网址:
二种系统相频特性的差异 设有a和b两个系统,它们的传递函数分别为
1 T2 s Ga ( s ) 1 T1 s
1 T2 s Gb ( s ) 1 T1 s
《自动控制理论》
其中0<T2<T1。这两个系统的极点完全相同,且位于s 平面的左方,以保证系统能稳定。它们的零点一个在s 平面的左方,一个在s平面的右方,如图5-18所示。由 于系统a的零、极点都位于s的左半平面,因而它是最 小相位系统。而系统b的零点位于s的右半平面,因而 它是非最小相位系统。
G ( j ) 1 j
1 ⑷ 惯性环节 G ( s ) Ts 1
G ( j ) 1 1 j T
1 2T2 G arctan T
G
1
《自动控制理论》
网址:
课程回顾(2)
2 2 1 n n (5)振荡环节 G ( s ) s 2 2 s 2 s 2 s n n ( ) 2 1 ( s 1 )( s 2 ) n n 1 G ( j ) G ( j 0) 10 2 1 2 j 2 G( j ) 0 180 n n
G( j 0) 0 270
G G
G( j) 10
j 3 (1 j 5 )(1 j )(1 j 0.2 ) G ( j ) (1 25 2 )(1 2 )(1 0.04 2 ) 4 (6.2 2 ) j 3 (1 6.2 2 ) (1 25 2 )(1 2 )(1 0.04 2 )
X jY
A:
A 1 6.2 0.402 G( j A ) 0.0267 j 0
B 6.2 2.49 B: G( j ) 0 j 0.412 B
《自动控制理论》
系统奈奎斯特曲线(开环频率特性极坐标图)的绘制要点: 奈氏曲线在 =0 到 0+ 的变化随系统的不同而差别很大: “0”型系统:奈氏曲线从实轴(幅值=K处)开始 “I”型系统:奈氏曲线从实轴(幅值=∞处)开始, =0+ 就转过-90°到 负虚轴附近;是在第三或第四象限,应比较=0+ 时各零点的相角之 和与各极点相角之和哪个大,前者大则在第四象限,否则第三象限 “II”型系统:奈氏曲线也是 从实轴(幅值=∞处)开始, =0+ 就转过-180°到负 实轴;是在第二或第三象 限,也是比较=0+ 时各 零点的相角之和与各极点 相角之和,前者大则第三 象限,否则第二象限
5 例4:G ( s ) s( s 1)( 2 s 1) ,画G(jw)曲线。 5 j 5(1 j )(1 j 2 ) G ( j ) 解: j (1 j )(1 j 2 ) (1 2 )(1 4 2 )
15 5(1 2 2 ) j 2 2 (1 )(1 4 ) (1 2 )(1 4 2 )
网址:
§5.3 开环系统(Nyquist)(4)
例2:已知0型二阶系统和I型二阶系统的开环传 10 递函数分别为 G0 ( s) , G ( s ) 10
(1 0.1s)(1 s )
1
s(1 s )
试绘制它们对应的乃氏图。 解:0型系统的开环频率特性为
《自动控制理论》
网址:
§5.3 开环系统(Nyquist)(3)
G( s) K (T1T2 ) K v s v (T1 s 1)( T2 s 1) s ( s 1 T1 )( s 1 T2 )
v
0
G( j )
K (1 jT1 )(1 jT1 ) K j (1 jT1 )(1 jT1 )
⑹ G ( j ) 1 1 2 j 2 n n
2
j
1 jT
e-j
K
1 1 j T
(7) G ( j ) e
j
1
1 j
1
j 2 2 n n
2
《自动控制理论》
网址:
ω =∞ K 0 ∞ 0 0
ω =0 0° 0° 0° 0° 0°
φ (ω ) ω =0+ ω =1/T ω =∞ 0° 0° 0° (-90°) (-90°) (-90°) 0°+ (+45°) (+90°) 0°(-45°) (-90°) 0°(-90°) (-180°)
系统奈奎斯特曲线(开环频率特性极坐标图)的绘制方法: 按各个典型环节频率特性在各个频率下的大小迭加而成。它是一条大 致的曲线,需要准确计算的地方:负实轴相交的点。
《自动控制理论》
网址:
§5 频率响应法
§5.1 §5.2 §5.3 §5.4 频率特性的基本概念 对数频率特性(Bode图) 幅相频率特性(Nyquist图) 用频率法辨识系统的数学模型
§5.5
§5.6
频域稳定判据
相对稳定性分析
§5.7
频率性能指标与时域性能指标的关系
ω =∞ N-M=2、6
Re Im
N-M=1、5
• 绘制系统开环对数频率特性曲线(Bode图):有两张图,都是 按典型环节相加,开环对数幅频特性曲线通常可以使用近似特性, 绘制时根据传递系数、环节的转折频率和斜率一步就可以画出 • 绘制系统频率特性极坐标图(奈奎斯特曲线) :抓住曲线头尾 的特征,曲线与实轴的交点计算而得
§5.3 开环系统(Nyquist)(6)
10 10 2 e j ( ) 例3:G ( j ) ( j ) 2 (1 j ) (1 2 )
( ) 180 arctan
P175 例5-4
《自动控制理论》
网址:
§5.3 开环系统(Nyquist)(7)
《自动控制理论》
网址:
§5.3 开环系统(Nyquist)(5)
2) I 型系统的频率特性为
G ( j ) 10 10 e j ( ) j (1 j ) 1 2
( ) 90 arctan
把上式改写为
10 2 j 10 10 G( j ) j 2 j 2 j 1 2 3
§5.3 开环系统(Nyquist)(1)
例1:
1 G 考虑二阶传递函数: ( s ) s(Ts 1)
试画出这个传递函数的极坐标图。 解:
1 1 G ( j ) 2 j (1 jT ) j T
0 -1 Imaginary Axis -2 -3 -4 -5 -6 -3 Nyquist Diagram